电子罗盘设计方案
基于HMC5883的电子罗盘设计
支。 正常工作模式 中的串 口接 收 GP S数据放在 串口中断中处
定 。 芯 片 功耗 低 , 作 电流仅 5 0 A。 x x .5 该 工 0 6 6 1 mm 的 QF 4 N
封 装 ,适 用 于 电池 供 电 的 手持 设备 。图 中芯 片 S E P引 脚 为 LE
休 眠 控 制 端 ,低 电平 休 眠 , 此 时 消耗 电流 仅 为 3_ 。GS 、 p a 1 GS 2为灵 敏 度 选 择 ,共 有 4个 量 程 可 选 择(.g2/g6 ) 1 /g4 /g。输 5
3 o 【r ( 6 - ac 劬 )× 8 H ] 0 1
x > O, r > 0
( )控 制 器 模 块 2
控 制 器 采 用 MS 4 0 1 9 P 3F 4 ,它 是 一 款 1 6位 高 性 能 、超 低 功 耗 MC U, 工 作 电压 1 ~ . . 36 在 1 z 时钟 下 ,工 作 8 V, MH 电流 为 01' 0 A。大 多数 指 令 可 以单 时 钟 周 期 执 行 ,具 有 .- 0 “ " 4
区磁 偏 角 已知 时 ,真 北 方 位 角 为 :
A= + () 4
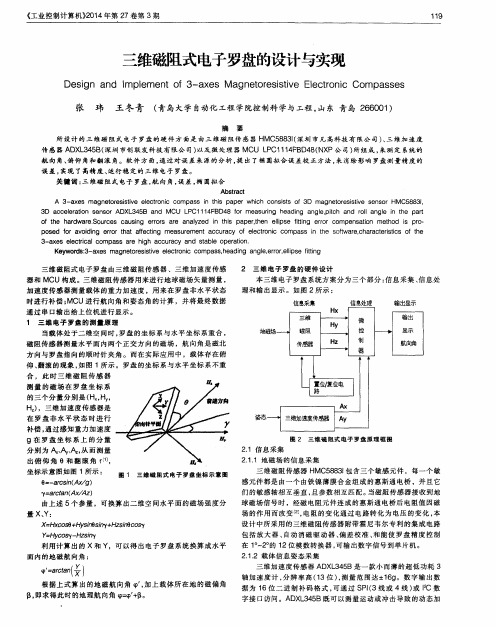
三 、 电子 罗盘 系 统 设 计 1 、硬 件 设 计 电子 罗 盘 硬 件 系 统 设 计 如 图 2所 示 ,该 电子 罗 盘 主要 由
传感器 、 控制器 、电源 、G S模块及显 示输 出 5个部分组成 。 P () 1 传感器模块 传感器模块 由磁 阻传感器和加速度传感器组成 。 磁阻传感器 电路 如图 3所示 ,图中 H 5 8 MC 8 3为数字接 口三轴磁阻传 感器 ,内置 ASC放大器 ,1 A D转换器, I 2位 /
范例三 电子罗盘
范例三 电子罗盘一.系统概述本系统的目标是设计一个两轴数字罗盘系统。
对其所指的方向进行测量。
当系统工作时,系统中的磁阻传感器(HMC022)对所在地的地磁进行A/D 采集,然后对采集量进行处理,将所在的方向相对正北的角度通过串口发送给高端。
本系统可工作在正常状态和标定状态。
正常状态在该状态下,系统对地磁进行正常采集后进行校准,然后通过串口将计算的方向角发送出来。
2 标定状态在该状态下,系统对周围的磁场进行采集,以此为参考,推导出校准参数。
退出该状态时,将校准参数保存起来,以便用于对正常状态下采集的数据进行偏置校准。
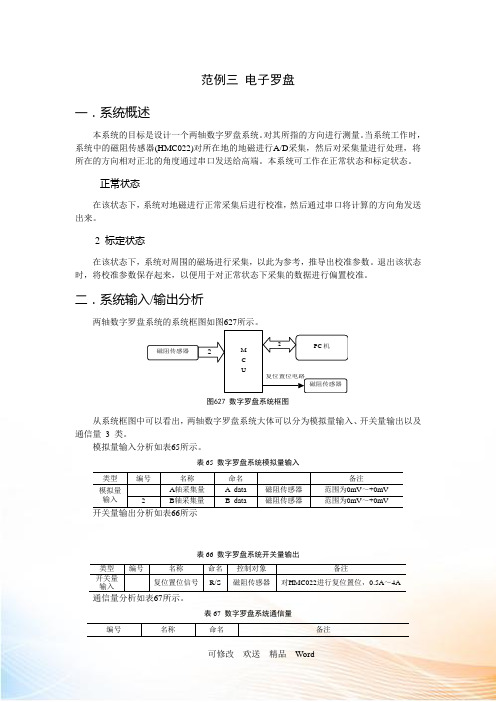
二.系统输入/输出分析两轴数字罗盘系统的系统框图如图627所示。
M C U2磁阻传感器2PC 机磁阻传感器复位置位电路图627 数字罗盘系统框图从系统框图中可以看出,两轴数字罗盘系统大体可以分为模拟量输入、开关量输出以及通信量 3 类。
模拟量输入分析如表65所示。
表65 数字罗盘系统模拟量输入类型 编号 名称 命名 备注模拟量输入A 轴采集量 A_data 磁阻传感器 范围为0mV ~+0mV 2B 轴采集量B_data磁阻传感器范围为0mV ~+0mV开关量输出分析如表66所示表66 数字罗盘系统开关量输出类型 编号 名称 命名 控制对象 备注开关量 输入复位置位信号R/S磁阻传感器对HMC022进行复位置位,0.5A ~4A表67 数字罗盘系统通信量编号名称命名备注串口发送数据 TxD 向PC 端发送数据 2串口接受数据RxD接收PC 端发来的数据三.硬件设计芯片选型选取芯片时应该注意:不要将所有的I/O 口用满,应当预留一定的输入输出端口,以便扩展需要。
通过分析数字罗盘系统的输入量和输出量,发现所需的I/O 口较少,为5个。
但考虑到该系统对A/D 采集精度要求较高并且要求有SCI 模块以便于通信,故考虑该系统采用具有0BitA/D 采集和SCI 模块的MR8。
2 设计框图数字罗盘系统的硬件框图如图628所示,下面将分析A/D 采集中的电压放大模块、HMC022(磁阻传感器)的置位/复位电路和SCI(RS232)通信模块。
基于MEMS传感器的微小型三维电子罗盘设计
小、 重量 轻 、 度 高 。 了 满足 这 些 需 要 , 出 了一 种 三 维磁 阻 式 电子 罗盘 系统 , 加 速度 计输 出信 号 和 经 过 仪 用 运放 放 大 精 为 提 将
后 的磁 阻 式传 感 器输 出信 号 输 入 到 单 片机 的 D. 过 滤 波算 法 以及 数 据 融合 . 获得 载 体 的 三 个 姿 态参 数 : 于地 球 磁 通 可 基
基 于 ME 感器 的微 小 型 三维 电子 罗盘设 计 ቤተ መጻሕፍቲ ባይዱ MS传
口 顾 大雄 口 高 同跃 口 沈春 涛
上海
口
唐
瑞
上 海 大 学 机 电工 程 与 自动 化 学 院
207 002
摘
要 : 机 器人 和 小型 直 升 飞 机 等 特 殊 控 制领 域 , 在 需要 有 高精 度 的 运 动 测 量 信 息 作 为 导航 状 态输 入 , 要 求 体 积 并
场 的航 向 角 . 于 地球 重 力场 的 横 滚 角和 俯仰 角 实验 结 果 获 得 较 好 的精 度 . 态精 度 可达 到 1 。 用 高集 成 度 的微 控 制 基 静 。 利
器 和 MEMS传 感 器 , 幅 度 缩 小 罗 盘 的 体 积 、 量 、 耗 以 及 成 本 , 适 合 嵌 入 式 系 统 使 用 。 大 重 功 更
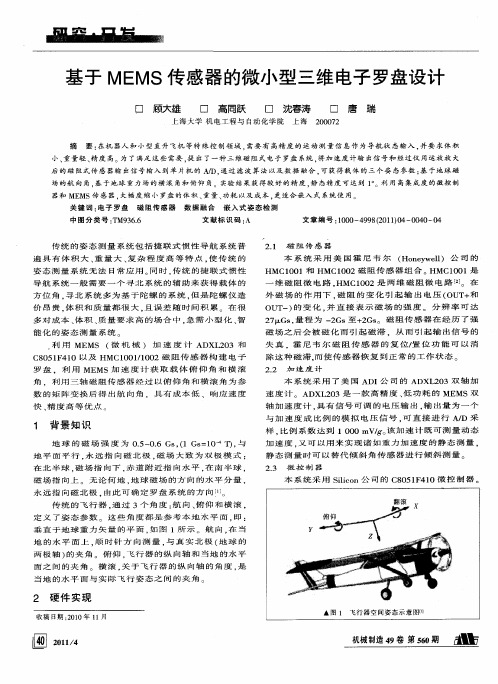
利 用 MEMS 微 机 械 ) 加 速 度 计 ADXL 0 和 f 23 C8 5 F 1 以 及 HMC1 0 / 0 2磁 阻 传 感 器 构 建 电 子 0 140 0 11 0
OU 一) 变 化 . 直 接 表 示 磁 场 的 强 度 。 分 辨 率 可 达 T 的 并 2 1 . 程 为 一 Gs至 + Gs 磁 阻 传 感 器 在 经 历 了 强 7. z Gs 量 2 2 。 磁 场 之 后 会 被 磁 化 而 引 起 磁 滞 . 从 而 引 起 输 出 信 号 的
电子罗盘的工作原理及校准 电子罗盘,电子指南针,android
AndroidST集成传感器方案实现电子罗盘功能电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
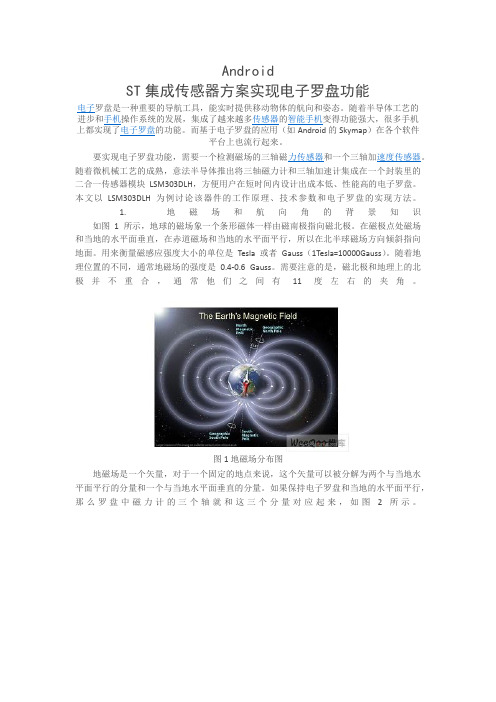
1. 地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?- 360?之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
基于51单片机的电子罗盘系统的设计与实现
本科生毕业设计(论文)论文题目:基于51系列单片机数字电子罗盘设计与实现姓名:学号:班级:年级:专业:学院:指导教师:完成时间:2013年5 月28日作者声明本人以信誉郑重声明:所呈交的学位毕业设计(论文),是本人在指导教师指导下由本人独立撰写完成的,没有剽窃、抄袭、造假等违反道德、学术规范和其他侵权行为。
文中引用他人的文献、数据、图件、资料均已明确标注出,不包含他人成果及为获得东华理工大学或其他教育机构的学位或证书而使用过的材料。
对本设计(论文)的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本毕业设计(论文)引起的法律结果完全由本人承担。
本毕业设计(论文)成果归东华理工大学所有。
特此声明。
毕业设计(论文)作者(签字):签字日期:年月日本人声明:该学位论文是本人指导学生完成的研究成果,已经审阅过论文的全部内容,并能够保证题目、关键词、摘要部分中英文内容的一致性和准确性。
学位论文指导教师签名:年月日基于51系列单片机数字电子罗盘设计与实现黄飞Based on 51 single-chip digital electronic compass system design and implementationHuangFeiI摘要当今社会交通越来越发达,导航系统也随之普遍。
在以前人们大多数使用地图,看路况。
但是由于经济发展,交通路线也变化好大。
现在虽然有GPS,但是在山区有覆盖遮蔽的地方,GPS也失去作用。
汽车出巡不方便,为解决这个的问题,本文主要研究使用在汽车导航设备的能够精确定向的电子罗盘系统。
本文主要介绍磁阻式电子罗盘的工作原理,并详细介绍了磁阻传感器HMC5883、双轴加速度传感器ADXL202、AD7705转换芯片以及AT89C52单片机的磁阻式电子罗盘的硬件设计;根据传感器信号输出特点,经过AD7705模数转换后,利用AT89C52单片机处理信息功能经过分析后,经显示屏显示行驶方向。
基于STM32的电子罗盘设计

7+ 10 uF
IC3 NCP1400ASN30T1G
D3 IN5819(4148)
3.3 V +
4 47 uF
图 2 电源升压电路图
2.2 HMC5883 磁阻传感器电路设计
HMC5883 磁 阻 传 感 器 接口电 路 如 图 3 所 示。 图 3 中
HMC5883 为数字接口双轴磁阻传感器,该传感器内置 ASIC 放大器,12 位 A/D 转换器,I2C 总线输出 [3]。R1、R2 为上拉电阻, DRDY 为数据准备好中断控制口,接控制器中断输入口。电容
采用数字磁阻传感 器、 双 轴 加 速 度传 感 器,处理器采用 ST M 32 F103R ET6 单片机,具 有电 路 结 构简单、集成度 高、 抗干扰能力强 等 优 点。 正常工作 时 耗电非常低, 同 时硬件成本低、 功
52 51 50
PC11 PC10 PA15
PB4 PB3 PD2 PC12
中图分类号:TP39
文献标识码:A
文章编号:2095-1302(2015)12-0008-02
0引言 GPS 在导航定位、测速方面具有广泛的应用,但在高楼
密集的城区和偏远地带,GPS 信号受到阻挡,信号精度降低, 因而 GPS 设备不能很好的将信号回馈到卫星 [1]。针对这一问 题,可以采用电子罗盘和 GPS 组成导航定向,电子罗盘可以 对 GPS 进行有效的补偿 [2]。同时,随着科技的发展,电子罗 盘也可以安装在汽车或者轮船上,当驶入到信号较差的地方 时,数字电子罗盘可以起到很大的作用。
GND
VCC 3.3
图 5 单片机最小系统原理图电路
VCC 3.3 GND RX3
TX3 GND
三维磁阻式电子罗盘的设计与实现
A 3- ax e s magn e t O r e s i s t i V e e l e c t r on i c co m pa s s i n t h i s pa pe r whi ch c on s i s t s o f 3 D m a gn e t O r e s i s t i v e s e n s or HM C58 83 1 ,
3-a x es e l e ct r i ca l c ompas s a r e hi gh ac cu r a c y an d s t abl e o pe r a t i on .
K e y wo r d s : 3 - a x e s ma g n e t O r e s i s l i V e e l e c t r o n i c c o mp a s s , h e a d i n g a n g l e , e r r o r , e l l i p s e f i t t i n g
3 D a c c e l e r a t i o n s e n s o r AD X L 3 4 5 B a n d MCU L P C1 1 1 4 F B D4 8 f o r me a s u r i n g h e a d i n g a n g l e , p i t c h a n d r o l l a n g l e i n t h e p a r t o f t h e h a r d wa r e . S o u r c e s c a u s i n g e r r o r s a r e a n a l y z e d i n t h i s p a p e r , t h e n e l l i p s e f i t t i n g e r r o r c o mp e n s a t i o n me t h o d i s p r o — p o s e d f o r a v o i d i n g e r r o r t h a t a f e c t i n g me a s u r e me n t a c c u r a c y o f e l e c t r o n i c c o mp a s s i n t h e s o f t wa r e , c h a r a c t e r i s t i c s o f t h e
电子罗盘应用电路设计与调试
内置自检功能 低电压工作(2.16-3.6V)和超低功耗(100uA) 内置驱动电路 I2C数字接口 无引线封装结构 磁场范围广(+/-8Oe) 有相应软件及算法支持 最大输出频率可达160Hz
SCL VDD NC S1
3 设计过程
HMC5883L简介
霍尼韦尔 HMC5883L 是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯 片,应用于低成本罗盘和磁场检测领域。HMC5883L 包括最先进的高分辨率HMC118X系 列磁阻传感器,并附带霍尼韦尔专利的集成电路包括放大器、自动消磁驱动器、偏差校 准、能使罗盘精度控制在1°~2°的12位模数转换器。
(2)电路调试 1. 使用+5V电源接入HMC5883L电子罗盘模块的J4接口,使用20P排线将 HMC5883L电子罗盘模块J2接口和智能显示终端的J2接口相连接起来,确认 无误之后,给模块上电,模块电路如图13.2所示。 2. 通过按键K1或K2选中电子罗盘实验,点击按键K5进入电子罗盘实验,可 以观察到智能显示终端上显示当前方向角。 3. 缓慢转动模块,观察智能显示终端上方向角的变化。
1. 任务描述 2. 器材准备 3. 设计过程 4. 电路调试
课程内容 Course Contents
1. 任务描述 2. 器材准备 3. 设计过程 4. 电路调试
1 任务描述任务描述 Nhomakorabea• 具体任务 1)掌握HMC5883L磁传感器结构及工作原理。 2)掌握电子罗盘应用电路的制作与调试方法。
• 任务要求 用HMC5883L测量当前方位角,并在智能显示终端上显示出来。
HMC5883L 采用霍尼韦尔各向异性磁阻(AMR)技术,这些各向异性传感器具有在轴向 高灵敏度和线性高精度的特点。传感器带有的对于正交轴低敏感度的固相结构能用于测 量地球磁场的方向和大小,其测量范围从毫高斯到 8 高斯(gauss)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子罗盘设计方案.doc
电子罗盘设计方案 1 引言V2XE 是一种以集成微处理器作为控制和接口新型2轴罗盘和大磁场传感器[1,U2XE 使用新型系统常用3V 工作电源,具有功耗低、尺寸小、各种条件下抗噪声能力强、较大测量灵敏感应区等优点。
V2XE 结合了PNI 公司专利磁场感应传感器和测量电路技术,不受补偿漂移影响,不同温度下测量结果很稳定。
V2XE 简单易行标准SPI 接口输入/输出数据。
2 性能特点V2XE 典型特性如下功率低(3V DC,2mA 输出); 封装尺寸小(25.4mm5.4mm11.5mm); 高磁感应(0.01°); 高磁精度(2.0°); 数字接口输出(3V 标准SPI 接口); 具有高磁场感应(0.00015Gauss); 具有大磁场量程(±11Gauss)。
V2XE 引脚功能如表1所列。
将V2XE 应用于GPS 系统,用AT89C2051读取V2XE 测量数据,串口将数据传送到GPS 处理器,图1示出V2XE 连接到单片机原理图。
AT89C2051没有标准SPI 口输出[2,故分别用P1.
7、P1.6和P1.5 来模拟SCLK、MISO 及MOSI 端。
V2XE 复位引脚SYNC 由P3.7脚控制,SSNOT 接,V2XE 工作从机模式。
3 数据格式和命令字V2XE 有Big Endian 和Little Endian 两种数据格式。
Big Endian 类型数据是从高位到低位存放,Little Editan 数据是倒序存放,即最高8位依次放最低8位数据,最低8位依次放最高8位数据。
如图2所示。
带有数据命令格式由开始标志(Sync Flay)、指令类别(Frame Type)和结束标志(Terminator)组成,图3所示是一个带有参数Heading(0X02)和Magnitude(0X05)SetDataComponents(0X03)命令构成。
V2XE 常用命令字包括GetModInfo、ModInfoResp、SetDataComponent、GetData 、DataResp、Setconfig、GetConfi g、ConfigResp 和SaveConfig 。
其指令码和功能如表2所示。
4 编程实例SPI 接口数据接收和发送是同步。
V2XE 每接收一个数据时将会发出0X00 。
当V2XE 发送命令应答时,它将不处理任何输入数据,,主机获取V2XE 数据时,应是发送和接收同时进行。
用 C 语言编写发送-接收函数SPITransmit 如下一个V2XE 系统典型应用流程如图4所示。
V2XE 出厂时,都其ROM 中固化了芯片版本号。
用户第一次应用V2XE 系统可首先读出该版本号以判断器件是否正常工作,可先向V2XE 发送命令GetModInfo,然后读取返回值ModInfoResp,其程序如下这样,获芯片信息存放数组verson 中,可
以读取值和实际版本号(V2XEV201)对比以确定系统是否正常工作,系统正常,首先要需要设置返回数据格式以确定V2XE 返回这些用户感兴趣值,主要包括磁方向角、磁场强度、温度和校准状态位等。
另外,还要设置一些初始化参数,主要包括Declination(本磁角,可以从http///cgi- bin/seg/gmag/fldsnth1.pl 获)、True North(设置参照角度为磁北[3)、Big Endian(选择数据大、小模式)、Dampingsize (数据缓冲区,将缓冲区里数据平均后作为V2XE 实际输出)。
V2XE 实际应用中,常常需要校准,常用命令包括StartCal、StopCal、GetCalData、CalDataResp 和SetCalData, 其指令代码和功能描述如表3所示。
标准过程中,V2XE 装置要尽量水平放置,从开始校准到结束校准过程中需将装置原旋转两周。
每转时间不小于30s,校准完成后,可以查询参数calstate 来判断校准是否成功,完成参数设置和校准等初始化工作后,可以发送指令GetData(0x04 )来获取V2XE 数据,对V2XE 每发送命令一次必须将其输出全部读出。
否则会影响下一次正常输出。