matlab实验六、SIMULINK基本用法讲解
MATLAB-SIMULINK讲解完整版
第3章 SIMULINK应用基础
(1) 文件管理类:包括 4 个按键,分别是按键 、按键 和按键 。
(2) 对象管理类:包括 3 个按键,分别是按键 和按键 。
、按键 、按键
(3) 命令管理类:包括 2 个按键,分别是按键 和按键 。
(4) 仿真控制类:包括 6 个按键、1 个文本框、1 个列表
框,分别是按键 、按键 如图3-6所示,在模型中加入注释文字,使模型更具可 读性。
图3-6 添加注释文字示例 (a) 未加注释文字;(b) 加入注释文字
第3章 SIMULINK应用基础
3.2.3 子系统的建立与封装 1. 子系统的建立 一般而言,电力系统仿真模型都比较复杂,规模很大,
包含了数量可观的各种模块。如果这些模块都直接显示在 SIMULINK仿真平台窗口中,将显得拥挤、杂乱,不利于用 户建模和分析。可以把实现同一种功能或几种功能的多个模 块组合成一个子系统,从而简化模型,其效果如同其它高级 语言中的子程序和函数功能。
、列 表框
、按键 、按键 和按键 。 (5) 窗口切换类:包括 6 个按键,分别是按键 、按键 、按键 、按键 和按键 。
、按键
工具栏中各个工具图标及其功能说明见附录 B。
第3章 SIMULINK应用基础
3.2 SIMULINK的基本操作
3.2.1 模块及信号线的基本操作 1. 模块的基本操作 模块是系统模型中最基本的元素,不同模块代表了不同
增强模型的可读性
签内容,在标签编辑框外的窗口中单击鼠标退出
第3章 SIMULINK应用基础
3.2.2 系统模型的基本操作 除了熟悉模块和信号线的基本操作方法,用户还需熟悉
SIMULINK系统模型本身的基本操作,包括模型文件的创建、 打开、保存以及模型的注释等。
matlab实验六 SIMULINK基本用法
实验六 SIMULINK 基本用法一 实验目的1. 学习SIMULINK 软件工具的使用方法;2. 用SIMULINK 仿真线性系统;二 实验内容1.SIMULINK 简介SIMULINK 是MATLAB 软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB 语言的主要区别在于,其与用户交互接口是基于Windows 的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
所谓模型化图形输入是指SIMULINK 提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl 文件进行存取),进而进行仿真与分析。
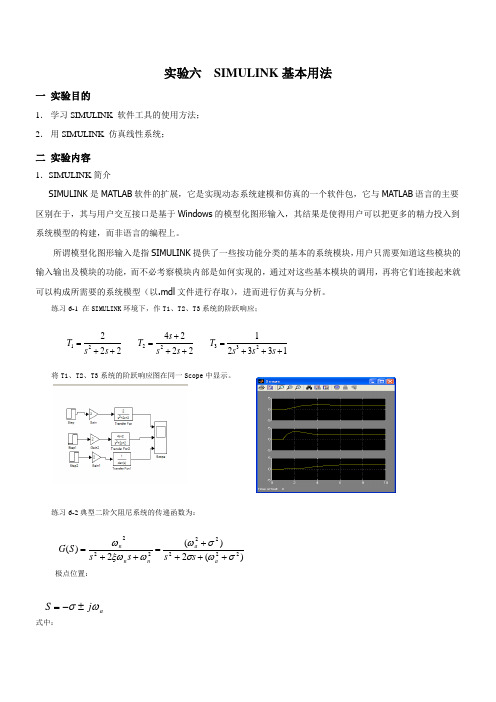
练习6-1 在SIMULINK 环境下,作T1、T2、T3系统的阶跃响应;将T1、T2、T3系统的阶跃响应图在同一Scope 中显示。
练习6-2典型二阶欠阻尼系统的传递函数为:极点位置:式中:1332122242222332221+++=+++=++=s s s T s s s T s s T )(2)(2)(22222222σωσσωωξωω++++=++=a a n n n s s s s S G aj S ωσ±-=在SIMULINK 环境下,作该系统在以下参数时的仿真:① 设ωa=1, σ=0.5,1,5 ,求阶跃响应,(用同一Scope 显示);②设σ=1 , ωa=0.5,1,5 ,求阶跃响应在(用同一Scope 显示);③设:求阶跃响应(用同一Scope 显示);④设 25,2,22,21==n ωξ0006045302==θωn )cos(;1;2θξξωωξωσ=-==n a n求阶跃响应,(用同一Scope显示);阶跃响应的时间:0≤t≤10,阶跃信号幅值为+2V。
分析参数变化(增加、减少与不变)对阶跃响应的影响。
MATLAB第六讲simulink(2)

2.Parameters选项卡参数设置
确定被封装子系统内部变量与对话框中输入量间的 联系。 Prompt用来设置变量提示符; Variable用来设置变量名; 它们的作用是在封装子系统的参数对话框中提示用 户设置什么内容和指定变量来接受用户设置的内容。 Type下拉菜单用于指定控件类型,Edit为默认形式,接 受使用者输入的数据,若只有几个提空的选项,则用 Popup。
七、SIMULINK实现的元件级电路仿真
就仿真模型逼近被仿真系统的真实程度而言,前面 所建SIMULINK模型属于功能级仿真模型。这种模型所 使用的模块与真实的物理器件之间不存在一一对应的关 系;这种模型的构建以抽象了的数学模型为基础。较早 的SIMULINK,就是进行功能级仿真的软件环境。但最 近发布的几个SIMULINK版本,已经在某些专业领域把 仿真推进到了元器件级。
例8:利用触发子系统将一锯齿波转换为方波。
2.使能触发子系统(Enable 和trigger模块都加到子系 统中) 二者共同作用子系统执行。即只用当信号正时触发事 件发生。
6.5子系统的封装
为子系统自定义对话框和图标,使子系统有个独立 的操作界面,把子系统中的各模块参数对话框结合成 一个参数设置对话框,在使用时不必打开每个模块进 行参数设置,这样是子系统使用更加方便。
如:qh16 disp('哈哈'); port_label('input',1,'in1'); port_label('input',2,'in2'); port_label('output',1,'out1'); 显示图形命令plot(cos(0:0.1:2*pi),sin(0:0.1:2*pi))
matlab第6章 simulink 深入学习
第—个假设,不考虑空气阻力。在这个假设 下,球在空中运行过程中的机械能量是不变的, 也就是说球在与地板撞击后的瞬时速率和下次与 地板撞击前的速率是相同的。 第二个假设.就是对球和壁板的撞击过程进 行了简化。在这里,模型假定撞击后的速度与撞 击前的速度之比始终是一个常数,在上图中是0.8。
明白了这两个假设,下面来看看用simulink建立 该模型的具体技巧。根据牛顿运动定理.不难理解 速度和加速度之间的积分关系以及位移和速度间的 积分关系。所以在模型的实现里有两个积分器—— 名称分别是position和velotcity.。对于position模块, 它的输入正是速度信号,并且由于球的初始位置是 10,所以它的初始状态是10。此外,球与地板接触 与否对位移的运算规律没有任何影响,所以Position 积分器的积分限是0到无穷大。但对于velocity积分模 块,由于小球和地板接触之后速度改向,并且使积 分的初始值变化,所以结构和常用的积分模块不太 一样,从图中可以看出,这个模块有三个输入和两 个输出。
•
当选择Limit output选项,模块有三个过零区 间: 一个检测它何时达到饱和上限;一个检测何 时达到了饱和下限;另外一个检测何时离开饱和 状态。
(4)复位状态 模块可以通过一个外部信号复位状态为指定的初 始条件。要使得模块重置它的状态,选 择External reset选项。一个触发端口显示在模块输 入端口的下方并且显示了其触发类型。
这个模型的最大的闲难就是如何确定小球与地 板接触,在simulink 里是通过过零检测来解决它的。 可以到.position 积分器的输出输入到velocity的 外部reset端口,因为该端口是下降触发的,一旦位 移从正变为负就产生了一个下降触发事件, Simulink可以通过零检测来捕获这个事件。于是一 旦检测到改下降触发,就会使velocity重新置为初 始值.而此时的初始值为当前状态值乘以-0.8,这 就和物理过程符合了。
matlab中-simulink的应用

▪ 例10.1.2:实现两个正弦信号的相乘。
2024年6月5日
9
10.2 模型的创建和模型文件
10.2.1 SIMULINK 模型是什么?
▪ SIMULINK 模型有以下几层含义:
• 在视觉上表现为直观的方框图;
• 在文件上则是扩展名为 mdl 的ASCII代码;
例10.1.2:实现两个正弦信号的相乘。
2024年6月5日
26
10.3 仿真运行(续1)
10.3.2 通过命令行运行仿真 ▪ 通过命令行运行仿真与通过菜单运行仿真相比 ,有如下的 一些优点:
• 可以不理睬模块中的初始条件(参数 x0 );
• 可以定义任何外部输入(用参数 ut );
• 可以由一个M 文件来启动一个仿真,并且允许模块中的 参数发生改变 。
信号线的分支和折曲 分支的产生 信号线的折曲 折点的移动
2024年6月5日
返回
17
(1)解参数的设置(Solver)
2024年6月5日
18
(2)仿真数据的输入输出设置(Workspace I/O)
2024年6月5日
19
(3)仿真中异常情况的诊断(Diagnostics) 返回
2024年6月5日
Simulink提供建立系统模型、选择仿真参数和 数值算法、启动仿真程序对该系统进行仿真、设 置不同的输出方式来观察仿真结果等功能。
2024年6月5日
2
1.交互式、图形化的建模环境
Simulink提供了丰富的模块库以帮助用户快速地建立 动态系统模型。建模时只需使用鼠标拖放不同模块库 中的系统模型并将它们连接起来。它外表以方块图形 式呈现,且采用分层结构。
matlab实验报告(实验6)
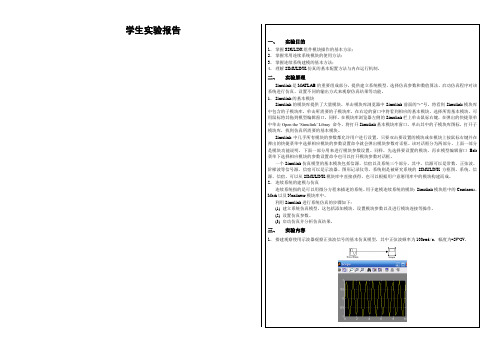
学生实验报告一、实验目的1、掌握SIMULINK组件模块操作的基本方法;2、掌握常用连续系统模块的使用方法;3、掌握连续系统建模的基本方法;4、理解SIMULINK仿真的基本配置方法与内在运行机制。
二、实验原理Simulink是MATLAB的重要组成部分,提供建立系统模型、选择仿真参数和数值算法、启动仿真程序对该系统进行仿真、设置不同的输出方式来观察仿真结果等功能。
1、Simulink的基本模块Simulink的模块库提供了大量模块。
单击模块库浏览器中Simulink前面的“+”号,将看到Simulink模块库中包含的子模块库,单击所需要的子模块库,在右边的窗口中将看到相应的基本模块,选择所需基本模块,可用鼠标将其拖到模型编辑窗口。
同样,在模块库浏览器左侧的Simulink栏上单击鼠标右键,在弹出的快捷菜单中单击Open the ‘Simulink’ Libray 命令,将打开Simulink基本模块库窗口。
单击其中的子模块库图标,打开子模块库,找到仿真所需要的基本模块。
Simulink中几乎所有模块的参数都允许用户进行设置,只要双击要设置的模块或在模块上按鼠标右键并在弹出的快捷菜单中选择相应模块的参数设置命令就会弹出模块参数对话框。
该对话框分为两部分,上面一部分是模块功能说明,下面一部分用来进行模块参数设置。
同样,先选择要设置的模块,再在模型编辑窗口Edit菜单下选择相应模块的参数设置命令也可以打开模块参数对话框。
一个Simulink仿真模型的基本模块包括信源、信宿以及系统三个部分。
其中,信源可以是常数、正弦波、阶梯波等信号源,信宿可以是示波器、图形记录仪等,系统则是被研究系统的SIMULINK方框图。
系统、信源、信宿,可以从SIMULINK模块库中直接获得,也可以根据用户意愿用库中的模块构建而成。
2、连续系统的建模与仿真连续系统指的是可以用微分方程来描述的系统。
用于建模连续系统的模块:Simulink模块组中的Continous、Math以及Nonlinear模块库中。
MATLAB-Simulink的基础应用..
第3节 仿真模型的搭建方法与步骤
3.1 传感器输出特性仿真
例:已知某直流比较仪的输出特性曲线表达式为: I1=kI2+I0 式中I1和I2分别是一次电流和二次电流,I0为比较 仪的偏置系数,k为比较仪的灵敏度,已知k=114和 I0=110mA,试用Simulink绘制该比较仪的输出特性曲 线。 1. 调用功能模块 确定需要哪些功能模块,并找到所在的模块库。需 要以下模块:Ramp、Constant、Gain、sum、scope。
2
第2节 Simulink的操作方法
2.1 Simulink的运行操作
1、运行Simulink的方法 在MATLAB的命令窗口直接键入“simulink”; 利用MATLAB工具条上的Simulink快捷键图标; 在MATLAB菜单中,选择“File-New-Model” 2、打开已存在的模型文件 在MATLAB主窗口中直接键入文件名(不加扩展 名); 在MATLAB菜单中,选择“File-Open-Model” 利用MATLAB工具条上的“打开”图标。
13
4. 由功能模块组合成子系统 将现有的多个功能模块组合起来,形成新的功能模块。 例:构建下图所示的子系统
14
第4节 电力系统仿真初探
4.1 电力系统元件库简介
4.1.1 启动电力系统元件库 1. 利用指令窗口启动 在指令窗口中输入以下指令即可。 >> powerlib 2. 利用“开始”导航区启动 Start→Simulink →SimPowerSystem →Block Library 8.1.2 退出电力系统元件库 1. 单击“电力系统元件库”对话框中的File菜单,激活Exit Matlab命令即可; 2. 单击“电力系统元件库”对话框右上角上的“×”按钮即 15 可完成退出。
Simulink基本操作
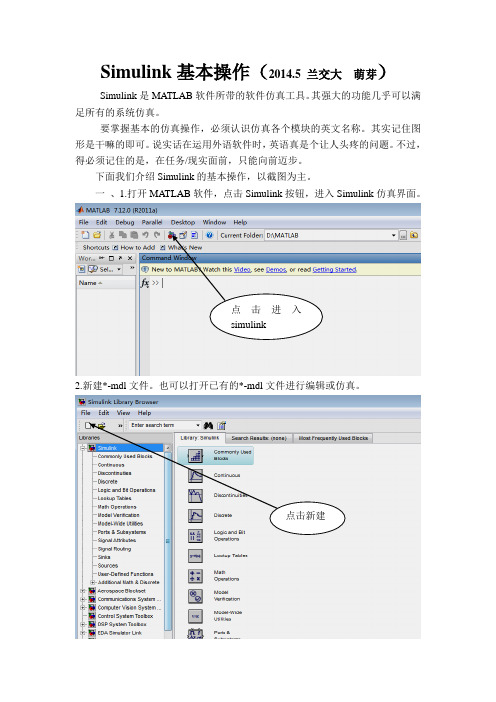
Simulink基本操作(2014.5 兰交大萌芽)Simulink是MATLAB软件所带的软件仿真工具。
其强大的功能几乎可以满足所有的系统仿真。
要掌握基本的仿真操作,必须认识仿真各个模块的英文名称。
其实记住图形是干嘛的即可。
说实话在运用外语软件时,英语真是个让人头疼的问题。
不过,得必须记住的是,在任务/现实面前,只能向前迈步。
下面我们介绍Simulink的基本操作,以截图为主。
一、1.打开MATLAB软件,点击Simulink按钮,进入Simulink仿真界面。
点击进入simulink2.新建*-mdl文件。
也可以打开已有的*-mdl文件进行编辑或仿真。
点击新建3.出现*-mdl界面。
现在进可以编辑机构框图了。
4.完成后,点击运行按钮,同时保存文件位置,注意文件地址要明确。
运行按钮Simulink给我们的基本模块结构很多,都在Simulink library browser窗口中。
其中有基本模块和专业模块。
常用基本模块。
二、下面,我们举例说明其简单的使用说明。
以下图为例。
该图为计算机控制系统的最少拍有纹波控制系统。
1.首先,添加各模块,同时修改其参数值,还可以边添加连线。
2.右键点击Add to …即可添加模块到*-mdl文件中。
点击右键点击我们可以改变其位置和大小。
3.再依次添加这两个。
发现在*-mdl文件中出现以下现象,不要着急!4.这时我们可以把他们移开(点击一个,拉开,再点击一个,拉开)同时放大合适的比例。
5.修改其属性的选中模块,双击打开。
比如Sum修改点击ok 得到6.双击Mux,在option中选择signals 点击ok,得连线鼠标放在箭头处,拉动,放入入口箭头处即可。
7.题目里出现两个相同模块的,可以进行复制、粘贴。
得到两个模块后在进行属性和参数的修改8.接着进行别的模块添加工作。
9.模块添加完成。
进行属性和参数设置,得到注;为了能让大家看的清楚些,我把布局缩小了,在自己实验仿真时,完全可以放开成大窗口,将模块放大,更清晰明了,不要小家子气。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三 SIMULINK功能模块的处理
功能模块的基本操作,包括模块的移动、复制、删除、转向、改变大 小、模块命名、颜色设定、参数设定、属性设定、模块输入输出信号 等。 模块库中的模块可以直接用鼠标进行拖曳(选中模块,按住鼠标左 键不放)而放到模型窗口中进行处理。 在模型窗口中,选中模块,则其4个角会出现黑色标记。此时可以对 模块进行以下的基本操作。 1) 移动:选中模块,按住鼠标左键将其拖曳到所需的位置即可。若要 脱离线而移动,可按住shift键,再进行拖曳。 2) 复制:选中模块,然后按住鼠标右键进行拖曳即可复制同样的一个 功能模块。 3) 删除:选中模块,按Delete键即可。若要删除多个模块,可以同时 按住Shift键,再用鼠标选中多个模块,按Delete键即可。也可以用鼠 标选取某区域,再按Delete键就可以把该区域中的所有模块和线等 全部删除。
4、Signal&Systems(信号和系统模块) sigsys.mdl
In1:输入端。 Out1:输出端。 Mux:将多个单一输入转化为一个复合输出。 Demux:将一个复合输入转化为多个单一输出。 Ground:连接到没有连接到的输入端。 Terminator:连接到没有连接到的输出端。
SubSystem:建立新的封装(Mask)功能模块
5、Sinks(接收器模块) sinks.mdl
Scope:示波器。 XY Graph:显示二维图形。 To Workspace:将输出写入MATLAB的工作空间。 To File(.mat):将输出写入数据文件。
6、Sources(输入源模块) sources.mdl
Constant:常数信号。 Clock:时钟信号。 From Workspace:来自MATLAB的工作空间。 From File(.mat):来自数据文件。 Pulse Generator:脉冲发生器。 Repeating Sequence:重复信号。 Signal Generator:信号发生器,可以产生正弦、方波、锯齿波及随 意波。 Sine Wave:正弦波信号。 Step:阶跃波信号。
4) 转向:为了能够顺序连接功能模块的输入和输出端,功能模块有时 需要转向。在菜单Format中选择Flip Block旋转180度,选择Rotate Block顺时针旋转90度。或者直接按Ctrl+F键执行Flip Block,按 Ctrl+R键执行Rotate Block。 5) 改变大小:选中模块,对模块出现的4个黑色标记进行拖曳即可。 6) 模块命名:先用鼠标在需要更改的名称上单击一下,然后直接更改 即可。名称在功能模块上的位置也可以变换180度,可以用Format菜 单中的Flip Name来实现,也可以直接通过鼠标进行拖曳。Hide Name可以隐藏模块名称。 7) 颜色设定: Format菜单中的Foreground Color可以改变模块的前景颜 色,Background Color可以改变模块的背景颜色;而模型窗口的颜色 可以通过Screen Color来改变。
Derivative:输入信号微分
State-Space:线性状态空间系统模型 Transfer-Fcn:线性传递函数模型 Zero-Pole:以零极点表示的传递函数模型 Memory:存储上一时刻的状态值 Transport Delay:输入信号延时一个固定时间再输出 Variable Transport Delay:输入信号延时一个可变时间再输出
8) 参数设定:用鼠标双击模块,就可以进入模块的参数设定窗口,从而 对模块进行参数设定。参数设定窗口包含了该模块的基本功能帮助, 为获得更详尽的帮助,可以点击其上的help按钮。通过对模块的参数 设定,就可以获得需要的功能模块。
SIMULINK的基本知识
一、SIMULINK的启动
1、在MATLAB命令窗口中输入simulink 结果是在桌面上出现一个称为Simulink Library Browser的窗口, 在这个窗口中列出了按功能分类的各种模块的名称。 2 、当然用户也可以通过MATLAB主窗口的快捷按钮来打开 Simulink Library Browser窗口。
2、 Function&Tables(函数和平台模块) function.mdl
Fcn:用自定义的函数(表达式)进行运算 MATLAB Fcn:利用matlab的现有函数进行运算
S-Function:调用自编的S函数的程序进行运算
Look-Up Table:建立输入信号的查询表(线性峰值匹配) Look-Up Table(2-D):建立两个输入信号的查询表(线性峰值匹配)
二、SIMULINK的模块库介绍
SIMILINK模块库按功能进行分类,包括以下8类子库:
Continuous(连续模块)
Function&Tables(函数和平台模块) Math(数统模块) Sinks(接收器模块) Sources(输入源模块)
1、连续模块(Continuous) continuous.mdl Integrator:输入信号积分
3、 Math(数学模块) math.mdl
Sum:加减运算 Product:乘运算
Dot Product:点乘运算
Gain:比例运算 Math Function:包括指数函数、对数函数、求平方、开根号等常用 数学函数 Trigonometric Function:三角函数,包括正弦、余弦、正切等 MinMax:最值运算
Abs:取绝对值
Sign:符号函数
Logical Operator:逻辑运算
Relational Operator:关系运算 Complex to Magnitude-Angle:由复数输入转为幅值和相角输出
Magnitude-Angle to Complex:由幅值和相角输入合成复数输出
Complex to Real-Imag:由复数输入转为实部和虚部输出 Real-Imag to Complex:由实部和虚部输入合成复数输出