控制工程基础第2章
控制工程基础第二章参考答案

第二章 参考答案2-1 (1) 不是 (2) 是 (3) 不是 (4) 不是 2-2 (a))()()(3)(2222t u t u dtt du RC dt t u d C R i o o o =++ (b) )()()()()()()()(2211222121222111222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (c ) )()()()()()(33221312221t u R dtt du C R R t u R R dt t du C R R R R R i i o o +=++++(d))()()()()()()()(1211222121211211222121t u dtt du C R C R dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (e))()()()()()()()(221222121211222222121t u dtt du R C C dt t u d C C R R t u dt t du C R C R C R dt t u d C C R R i i i o o o +++=++++ (f) )()()()()()()(22121221t u R dtt du L t u R R dt t du L C R R dt t u d CL R i i oo o +=++++ 2-3 (a) )]()([)()()(23213121t u R dtt du C R R t u R dt t du C R R R R i i o o +=++-(b) )()()()(4141232022213210t u R R t u R R dt t du C R R R dt t u d C C R R R R i o o o -=++ (c))]()()([)(32321t u R R dtt du C R R t u R i i o ++=-(d) )()()()()(221122212121t u dt t du C R C R dt t u d C C R R dt t du C R i i i o +++=- (e) )()()()(2412222142t u dtt du C R C R dt t u d C C R R o o o +++ )}()(])([)({21213224223221432132t u dtt du R R C C R R C R dt t u d R R C C R R R R R R i i i +++++++=- 2-4 (a) dt t dx f dt t dx f f dt t x d m i o o )()()()(12122=++ (b) dt t dx f k t x k k dt t dx f k k i o o )()()()(12121=++ (c) )()()()()(121t x k dt t dx f t x k k dt t dx f i i o o +=++ (d) )()()()()()(112121t x k dtt dx f t x k k dt t dx f f i i o o +=+++2-5 (a))(1)()()()(1)()()(2112212221211*********t u C C dt t du C R C R dt t u d R R t u C C dt t du C R C R C R dt t u d R R i i i o o o +++=++++ (b))()()()()()()()(2112212221211211212221t x k k dtt dx k f k f dt t x d f f t x k k dt t dx k f k f k f dt t x d f f i i i o o o +++=++++ 由(a)(b)两式可以看出两系统具有相同形式的微分方程,所以(a)和(b)是相似系统。
控制工程基础第2章

传递函数
线性定常系统在零初始条件下,系 统输出量的拉氏变换与输入量的拉氏变 换之比。
拉氏变换的性质
2、延迟定理 若 f(t)的拉氏变换为 F(s),则对任一
正实数a有
L[ f (t a)] easF(s)
说明:当 t<0时,f(t)=0, f(t-a) :延时函数,表示f(t)延迟时间a。
拉氏变换的性质
3、复数域的位移定理 若f(t)的拉氏变换为F(s),对于任
一常数a(实数或复数),有
(2)基尔霍夫电压定律:电网络的闭合回路 中电势的代数和等于沿回路的电压降的代数和。
典型元件所遵循的物理定律
➢ 电阻
➢ 电感 ➢ 电容
例
L
ui i
R
C uo
ui
(i)
Ri(t)
L
d dt
i(t)
uo
(i)
i(t)
C
d dt
uo
(t)
LC
d2 dt 2
u0
(t)
RC
d dt
u0
(t)
u0
(t
)
ui
F(s)
s2
s
3 3s
2
s
k1
1
s
k2
2
k1
s2
s3 3s
2
(s
1)
s1
2
k2
s2
s3 3s
2
(s
2)
s2
1
F(s) 2 1 s1 s 2
f (t) 2et e2t
2、F(s)有重极点的情况
设F(s)有r个重极点p1,其余极点均不相同,则
F(s)
B(s) A(s)
控制工程基础第二章拉普拉斯变换
n
(t≥0, n> -1且为整数)
其拉氏变换 为 n
L[t ] t e dt
n st 0
n! L[t ] n 1 s
n
单位阶跃函数 、 单位斜坡函数及单 位加速度函数分别 是幂函数 t n (n 1) 当n=0、 n=1 及 n=2时的特例。
page 15
L1 L e2t Lcos3t L t 3 L t
1 1 s 6 2 4 1 s s2 s 9 s
page 20
机电工程学院
第二章
拉普拉斯变换
二、延时定理(Time-Shift Theorem)
若有
L[ f (t )] F ( s) ,对任意实数 a ,则
at
st
page 12
机电工程学院
第二章
拉普拉斯变换
(六)正弦函数 正弦函数(Sine Function)的数学表达式为 式中,
控 制 工 程 基 础
为正弦函数的角频率。
0
r (t ) sin t
(t≥0)
其拉氏变换 为
L[sin t ] sin t e dt
机电工程学院
第二章
拉普拉斯变换
二、典型时间函数的拉氏变换
常用的时间函数有:
控 制 工 程 基 础
单位脉冲函数、单位阶跃函数、单位斜坡函数、单位加 速度函数、指数函数、正弦函数、余弦函数、以及幂函数等。
page
6
机电工程学院
第二章
拉普拉斯变换
(一)单位脉冲函数
单位脉冲函数(Unit Impulse Function)也称为 函数或称狄 拉克函数(Dirac Function),其 变化曲线如图2-1-1, 数学表达式为:
控制工程基础_第二章(2017)
时,
R F (s) s
18
例 求单位斜坡函数f(t)=t的拉氏变换。 f (t )
单位斜坡函数如图(b) 所示,定义为
0 t 0 f (t ) t t 0
解:利用定义式,可得
O
t
(b)单位斜坡函数
F (s)
0
1 1 st 1 1 st 1 st t e dt t ( e ) e dt 0 e 2 0 0 s s s s 0 s
12
二.举例
1.机械系统的微分方程式
机械系统设备大致分两类:平移的和旋转的。它们之间的区 别在于前者施加的力而产生的是位移,而后者施加的是扭矩产生 的是转角。
牛顿定律和虎克定律等物理定律是建立机械系统数学模型的基础
c1 m c2 xo xi
例1(1)如图所示机械系统。求其微分方程,图中Xi 表示输入位移,Xo 表示输出位移,假设输出端无负 载效应。(c、c1、c2为阻尼系数,k1、k2为弹性系数) 由牛顿定律有: 化为标准式得:
st
例 求单位脉冲函数的拉氏变换。 单位脉冲函数如图(c)所示。定义为
0 t 0 且 (t ) t 0
0
f (t )
(t )
O
0
(t )dt 1
0
t
F ( s) (t )e st dt (t )e st dt (t )e st dt f (0) e st
图c
14
(4)机械旋转系统 图中所示转动惯量为J的转子与弹性系数为k的弹性轴和阻尼 系数为B的阻尼器连接。假设外部施加扭矩m(t),则系统产生一个 偏离平衡位置的角位移(t) 。研究外扭矩m(t)和角位移(t)的关系。
控制工程基础第2章答案
第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
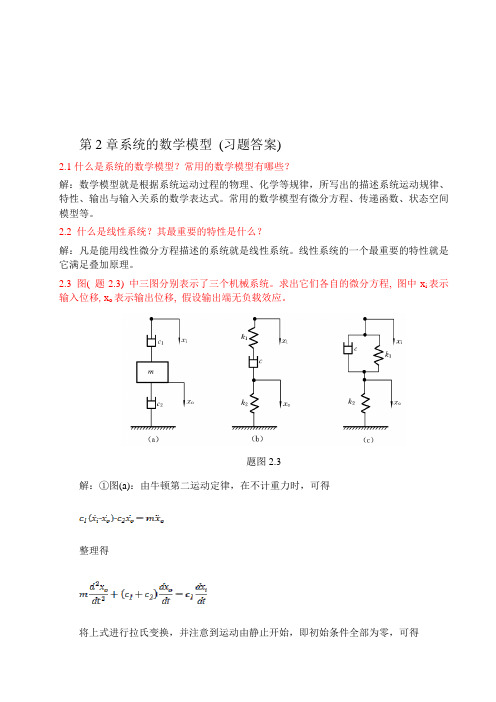
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-C)(t u r )(t u c )(t r )(t x c f1k 2k CR)(t u r )(u c +-+-f)(t r )(t x c )(a )(b )(c )(d R 2R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
控制工程基础:第二章 控制系统的数学模型及传递函数
用线性微分方程描述的系统,称为线性系统。 如果方程的系数为常数,则称为线性定常系统; 如果方程的系数不是常数,而是时间的函数,则称为线性时 变系统。
线性系统的重要性质是可以应用叠加原理:
(1)多个输入同时作用于线性系统的总响应,等于各个输入 单独作用时分别产生的响应之和,且输入增大若干倍时,其输出 亦增大同样的倍数。
一、 拉氏变换的定义
§2.2 拉普拉斯积分变换
1. 拉氏变换的定义
如果有一个以时间t为自变量的实函数f (t),
它的定义域是t 0,那么函数f (t)的拉氏变换为:
L[ f (t)] F (s) f (t)est dt 0
复变量:s j
原函数: f (t) 象函数: F (s)
F(s) L[ f (t)]
(6)式即为二阶常系数线性微分方程。
四、小结:
§2.1系统运动微分方程的建立
(1)物理本质不同的系统,可以有相同形式的数学模型。
机械平移动力学系统:
d2 m dt2
xo
(t
)
B
d dt
xo (t) kxo (t)
fi (t)
电网络系统:
LC
d2 dt 2
uo
(t)
RC
d dt
uo
(t)
uo
(t)
L[Ax1(t) Bx2 (t)] AX1(s) BX 2 (s)
2. 微分定理和积分定理
(1)微分定理
在所有初始条件均 为零时
L[ df (t)] sF (s) dt
L[ f (t)] F(s)
L[ df (t)] sF (s) f (0) dt
L[ d 2 f (t)] s 2 F (s) sf (0) f (0) dt 2
控制工程基础第2章答案

第2章系统的数学模型(习题答案)2.1什么是系统的数学模型?常用的数学模型有哪些?解:数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
常用的数学模型有微分方程、传递函数、状态空间模型等。
2.2 什么是线性系统?其最重要的特性是什么?解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要的特性就是它满足叠加原理。
2.3 图( 题2.3) 中三图分别表示了三个机械系统。
求出它们各自的微分方程, 图中x i表示输入位移, x o表示输出位移, 假设输出端无负载效应。
题图2.3解:①图(a):由牛顿第二运动定律,在不计重力时,可得整理得将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[]于是传递函数为②图(b):其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并记其初始条件为零,得系统传递函数为③图(c):以的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2.4试建立下图(题图2.4)所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
+-+-u )tfC)+-+-f)(a )(b )(c )(d R题图2.4【解】:)(a方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:⎪⎩⎪⎨⎧=+=⎰i R u u dt i C u cc r 1消去中间变量,整理得:dtdu RC u dt du RCrc c =+方法二:dtdu RC u dt du RCRCs RCs CsR R s U s U rc c r c =+⇒+=+=11)()( 由于无质量,各受力点任何时刻均满足∑=0F ,则有:cc r kx dt dxdt dx f =-)(dtdx k f x dt dx k f rc c =+⇒()r r c c r c u dtduC R u dt du C R R Cs R R Cs R Cs R R CsR s U s U +=++⇒+++=+++=221212212)(1111)()( 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程r rc c aa c a r c r x dtdx k f x dt dx f k k k k dt dx f x x k x x k x x k +=++⇒⎪⎩⎪⎨⎧=--=-22121221)()()( 结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。
控制工程基础 清华大学 董景新 第二章 控制系统的动态数学模型

2.1 基本环节数学模型
数学模型是描述物理系统的运动规律、特性 和输入输出关系的一个或一组方程式。 系统的数学模型可分为静态和动态数学模型。 静态数学模型:反映系统处于平衡点(稳态) 时,系统状态有关属性变量之间关系的数学模型。 即只考虑同一时刻实际系统各物理量之间的数学 关系,不管各变量随时间的演化,输出信号与过 去的工作状态(历史)无关。因此静态模型都是 代数式,数学表达式中不含有时间变量。
控制工程基础
(第二章)
清华大学
第二章
2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9
控制系统的动态数学模型
基本环节数学模型 数学模型的线性化 拉氏变换及反变换 传递函数以及典型环节的传递函数 系统函数方块图及其简化 系统信号流图及梅逊公式 受控机械对象数学模型 绘制实际机电系统的函数方块图 状态空间方程
式中, a1 , a2 是常值,可由以下步骤求得 将上式两边乘 s j s j , 两边同 时令s j(或同时令s j ), 得
a1s a2 s j X s s j s j s j
s3 例 试求 X s 2 s 3s 2
的拉氏反变换。
s 3 解: X s 2 s 3s 2 s3 s 1s 2 a1 a2 s 1 s 2
s3 a1 s 1 2 s 1s 2 s 1 s3 a2 s 2 1 s 1s 2 s 2 2 1 X s s 1 s 2 t 2t xt 2e e 1t
T st
2T T
xt e
st
n 1T dt
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学习要求
掌握用分析方法建立物理系统数学模型的过程; 了解一、二阶线性系统微分方程的标准形式; 掌握传递函数的定义、求法、典型环节的传递函数描述; 掌握结构图化简和简单梅逊公式求系统的传递函数; 了解MATLAB软件对线性系统建模和分析方法。
学习内容
2-1 系统的微分方程 2-2 拉普拉斯变换 2-3 传递函数 2-4 系统框图及简化 2-5 信号流图与梅逊公式
(1)基尔霍夫电流定律:汇聚到某节点的所 有电流之代数和应等于0(即流出节点的电流之 和等于所有流进节点的电流之和)。
(2)基尔霍夫电压定律:电网络的闭合回路 中电势的代数和等于沿回路的电压降的代数和。
典型元件所遵循的物理定律
➢ 电阻
➢ 电感 ➢ 电容
例
LR
ui
i
C uo
ui
(i)
Ri(t)
L
d dt
线性系统
可以用线性微分方程描述的系统
dn
dn1
an dtn xo(t)an1dtn1 xo(t)Ka0xo(t)
bmddtm mxi(t)bm1ddtm m11 xi(t)Kb0xi(t)
线性是指系统满足叠加原理,即
可加性 f(x 1 x 2 ) f(x 1 ) f(x 2 ) 齐次性 f(ax)af(x)
线性定常系统
a ( t ) & x & ( t ) b ( t ) x & ( t ) c ( t ) x ( t ) d ( t ) y ( t )
线性时变系统
y(t) x2(t)
非线性系统
例 判断下列微分方程表达的系统是线性系统 还是非线性系统?
(1) xo(t)t& x& i(t)xi2(t)
则 f(t) 的拉氏变换,记作
F(s)L[f(t)]f(t)estdt 0
L:拉氏变换符号; s:复变量; f(t):原函数; F(s):f(t)的拉氏变换函数,称为象函数。
拉氏反变换的定义
将象函数 F(s)变换成与之相对应 的原函数 f(t) 的过程
f(t)L1[F(s)]21j
非线性
(2)& x & o (t) 3 x & o (t) 8 x o (t) x i(t)
线性定常
(3) xo(t)costxi(t)
线性时变
(4)3 & x & o ( t) x o ( t)x & o ( t) 2 x o ( t) 5 x i2 ( t)
非线性
本课程涉及的数学模型形式
时间域:微分方程(一阶微分方程组)、 差分方程、状态方程
bmddtm mxi(t)bm1ddtm m11 xi(t)Kb0xi(t)
线性定常系统:方程的系数an, bm是常数;
线性时变系统:an, bm是时间的函数;
非线性系统:an, bm中只要有一个系数依赖于xo(t) 和xi(t)或它们的导数,或者在微分方程中出现其 它函数形式。
例
a & x & (t) b x & (t) c x (t) d y (t),其中a,b,c,d均为常数。
i(t)
uo
(i)
i(t
)
C
d dt
uo
(t
)
L Cd d t2 2u0(t)R Cd d tu0(t)u0(t)ui(t)
相似系统
若忽略系数的物理意义,则机械位移系统和电网络系 统的数学模型具有相同的形式,这种系统叫做相似系统, 揭示了不同物理现象之间的相似关系。
从动态性能看,在相同形式的输入作用下,相似系统 输出的响应相似。
输入量 C
F
t
fC
t fK fK t
t m Kxo t
d2 dt 2
xo
t
o
fC
t
C
d dt
xo
t
输出量
m d d t2 2xotC d d txotK xotF t
电网络系统微分方程的列写
电网络系统分析主要根据基尔霍夫电流定律和 电压定律写出微分方程式,进而建立系统的数学 模型。
系统的动态特性是系统的固有特性,仅取 决于系统的结构及其参数。
三、拉普拉斯变换
拉普拉斯变换是控制工程中的一 个基本数学方法,其优点是能将时间 函数的导数经拉氏变换后,变成复变 量s的乘积,将时间表示的微分方程, 变成以s表示的代数方程。
拉氏变换的定义
设时间函数 f(t)满足狄里赫利条件,其中 t 0
LR
ui i
C uo
d2
d
a 2d t2x0(t)a 1d tx0(t)a 0x0(t)b 0xi(t)
小结
物理本质不同的系统,可以有相同的数学 模型,从而可以抛开系统的物理属性,用 同一方法进行具有普遍意义的分析研究。 通常情况下,元件或系统微分方程的阶次 等于元件或系统中所包含的独立储能元的 个数。
机械系统微分方程的列写
机械系统中部件的运动有直线和转动两 种,系统中以各种形式出现的物理现象,都 可简化为质量、弹簧和 物体的加速度与其所受的合外力成正比,与 其质量成反比,且加速度与合外力方向相同 F=ma。
典型元件所遵循的物理定律
例 直线运动(机械平移系统)
复数域:传递函数、结构图 频率域:频率特性
二、系统微分方程的建立
建立微分方程的步骤:
分析系统的工作原理和信号传递过程,确定元件 或系统的输入量和输出量;
从输入端开始,按照信号传递变换过程,依据各 变量遵循的物理学定律,依次列写出各元件、部 件的动态微分方程。注意负载效应。
消去中间变量,推出只含输入、输出量及其导数 的微分标准方程,即右端输入,左端输出,导数 降幂排。
一、概 述
数学模型
描述系统或元件的动态特 性的数学表达式
建模
深入了解元件及系统的动态特 性,准确建立它们的数学模型
建立系统数学模型的方法
分析法
对系统各部分的运 动机理进行分析,依 据系统本身所遵循的 有关定律列写数学表 达式,并在列写过程 中进行必要的简化。
实验法
根据系统对某些 典型输入信号的响应 或其它实验数据建立 数学模型。即人为施 加某种测试信号,记 录其输出响应。
非线性系统
用非线性微分方程描述的系统。非线性系统不 满足叠加原理。
在实际系统中,变量之间不同程度地包含有非 线性关系,可进行如下处理:
线性化; 忽略非线性因素; 用非线性系统的分析方法。
线性系统和非线性系统的判别
设某系统的微分方程
an
dn dtn
xo(t)an1
dn1 dtn1
xo(t)Ka0xo(t)