控制工程基础第三章参考答案(供参考)
控制工程基础第三章参考答案

控制工程基础第三章参考答案1. 请问什么是系统的时滞?系统的时滞是指系统输入与响应之间的时间延迟。
在许多实际的控制系统中,输出变量的改变并不立即反映在系统的输入上,而是有一定的延迟。
这种延迟就是系统的时滞。
2. 请简述控制系统的稳态误差。
控制系统的稳态误差是指在稳态下,输出与期望值之间的差别。
稳态误差可以分为零稳态误差和非零稳态误差。
零稳态误差是指当输入值为常数时,输出值与期望值之间的差别;非零稳态误差是指当输入值为非常数时,输出值与期望值之间的差别。
3. 请解释积分环节在控制系统中的作用。
积分环节在控制系统中的作用是消除稳态误差,尤其对于常量输入的情况。
当系统存在零稳态误差时,引入积分环节可以通过积累误差信号来逐渐减小误差,以达到稳定的目标。
积分环节还可以提高系统的灵敏度,增强系统的抗干扰能力。
4. 请简要说明先行环节的作用。
先行环节是在系统前面加入的一个环节,其作用是预先对输入信号进行处理,以改善系统的性能。
常见的先行环节包括微分环节和预估环节。
微分环节可以提高系统的动态响应速度,并减小系统超调量;预估环节可以通过估计未来的输入值来增强系统的鲁棒性。
5. 请解释滞后环节在控制系统中的作用。
滞后环节在控制系统中的作用是补偿相位滞后,改善系统的相位特性。
它可以有效提高系统的稳定性和抗干扰能力,减小系统的超调量和震荡现象。
滞后环节常用于降低系统的低频增益,使系统在低频段的响应更加平滑和稳定。
6. 什么是校正环节?请简要说明其作用。
校正环节是指在控制系统中用于校正输出与期望值之间差别的环节。
它通过调整系统的增益、相位和延迟等参数,使得系统的输出能够与期望值更加接近。
校正环节起到了提高系统性能、降低误差和稳定系统的作用。
7. 请解释反馈控制在控制系统中的作用。
反馈控制是一种常见的控制策略,它根据系统的输出信号与期望值之间的差别,调整系统的输入信号,以实现期望的控制目标。
反馈控制可以有效补偿系统的非线性特性、时滞和干扰等因素,提高系统的稳定性和鲁棒性。
控制工程基础123章答案
第一章绪论内容提要一、基本概念1.控制:由人或用控制装置使受控对象按照一定目的来动作所进行的操作。
2.输入信号:人为给定的,又称给定量。
3.输出信号:就是被控制量。
它表征对象或过程的状态和性能。
4.反馈信号:从输出端或中间环节引出来并直接或经过变换以后传输到输入端比较元件中去的信号,或者是从输出端引出来并直接或经过变换以后传输到中间环节比较元件中去的信号。
5.偏差信号:比较元件的输出,等于输入信号与主反馈信号之差。
6。
误差信号:输出信号的期望值与实际值之差。
7。
扰动信号:来自系统内部或外部的、干扰和破坏系统具有预定性能和预定输出的信号。
二、控制的基本方式1.开环控制:系统的输出量对系统无控制作用,或者说系统中无反馈回路的系统,称为开环控制系统。
2.闭环控制:系统的输出量对系统有控制作用,或者说系统中存在反馈回路的系统,称为闭环控制系统.三、反馈控制系统的基本组成1.给定元件:用于给出输入信号的环节,以确定被控对象的目标值(或称给定值)。
2。
测量元件:用于检测被控量,通常出现在反馈回路中。
3.比较元件:用于把测量元件检测到的实际输出值经过变换与给定元件给出的输入值进行比较,求出它们之间的偏差。
4.放大元件:用于将比较元件给出的偏差信号进行放大,以足够的功率来推动执行元件去控制被控对象。
5.执行元件:用于直接驱动被控对象,使被控量发生变化。
6.校正元件:亦称补偿元件,它是在系统基本结构基础上附加的元部件,其参数可灵活调整,以改善系统的性能.四、控制系统的分类(一)按给定信号的特征分类1. 恒值控制系统2。
随动控制系统3。
程序控制系统(二)按系统的数学描述分类1. 线性系统2. 非线性系统(三)按系统传递信号的性质分类1. 连续系统2. 离散系统(四)按系统的输入与输出信号的数量分类1。
单输入单输出系统2。
多输入多输出系统(五)按微分方程的性质分类1。
集中参数系统2。
分布参数系统五、对控制系统的性能要求1。
现代控制工程基础第三章习题解答
解:
s5
1
2 11
s4
2
4 10
s3 0(ε)
6
4ε −12
s2
ε
10
s1
−10ε 2 + 24ε − 72 4ε −12
s0
10
当ε→0+时,第一列变了两次符号,故在右半平面
有两个正根。
10
(5) D(s)=s6+2s5+8s4+12s3+20s2+16s+16=0
解: s6 s5 s4 s3 s2 s1 s0
5
s0 K-8
第一列元素全部大于零,可得
8<K<18
13
3.14 已知单位负反馈的开环传递函数如下,试求系统在
输入信号分别为r(t)=1,t和t2时的稳态误差ess。
(1)
G(s) =
100
(0.1s +1)(0.5s +1)
解:闭环系统特征方程 D(s) = 0.01s2 + 0.6s +101 = 0 稳定的。
Hale Waihona Puke ess=1 1+ Kp
=1 1+ KK1
18
Vr
−
K1
+
K2 s
K Ts +1
Vc
(2) 当K2≠0时,求Vr(t)=1(t)时的稳态误差ess; I型系统,开环传递函数 G(s) = K(K1s + K2)
s(Ts +1)
当Vr(t)=1(t)时,静态位置误差系数
Kp
=
lim G(s)
s→0
=
∞
时速度误差系数为Kv=6?此时的ess为多少?
机械控制工程基础第3章习题解答
由于前述 K h 0.116
101 0.116 s 则系统的传递函数为: G s 2 s 3.16 s 10
输入单位阶跃 X i s
101 0.116 s X o s Gs X i s s 2 3.16 s 10 s 0.42 2.74 1 s 1.58 2.74 X o s s s 1.582 2.742 s 1.582 2.742
单位反馈,开环传递函数为:
Ⅱ 型,开环增益为
an K an 2
an 2 e ss an
3.16
101 K h s G s 2 s 2 10K h s s 10
K h 0.116
n 10 1 / s 3.161 / s 0.5 M p 16.3% 直接代入公式: t s 2.53 s 2% t 1.897 s 5% s
单位阶跃响应:x
ou
t 201 e
t / 2.5
xou t wt
3.8
3.12
微分关系
9 3 G s 2 s s 9 s 2 2 1 3s 32 6 n 31 / s M 58.8% p 0.167
求导,得到最大值
M p 17. 7%
clear all; close all; t=0:0.01:5; y=1-exp(-1.58*t).*cos(2.74.*t) -0.1533.*exp(-1.58*t).*sin(2.74.*t); %output express figure; h=plot(t,y,’r’); set(h,’linewidth’,5) set(gca, ’fontsize’,16) [mp_abs ,tp_space]=max(y(:)); %0.1772 mp= mp_abs–1; %计算最大超调量0.1772 tp= tp_space.*0.01; %计算峰值时间 grid on; i=tp_space; while abs(y(i)-1)>0.02 i=i+1; end ts=i.*0.01; %计算调整时间ts=1.69s
控制工程基础第三版课后答案 (3)

控制工程基础第三版课后答案第一章1.1 分析控制系统的对象控制系统的对象通常指的是待控制的物理系统或过程。
在分析控制系统对象时,首先需要了解系统的动态特性。
为了分析控制系统的特性,我们可以通过选取一个合适的数学模型来描述物理系统的动态行为。
一种常用的方法是通过微分方程来描述系统的动态特性。
例如,对于一个简单的电路系统,可以使用基尔霍夫电流定律和基尔霍夫电压定律来建立描述电路中电流和电压之间关系的微分方程。
然后,通过求解这个微分方程,我们可以得到系统的传递函数。
另外,我们还可以使用频域分析的方法来分析控制系统的对象。
通过对信号的频谱进行分析,我们可以得到系统的频率响应。
1.2 常见的控制系统对象控制系统的对象存在各种各样的形式,下面列举了一些常见的控制系统对象:•机械系统:例如机器人、汽车悬挂系统等。
•电气系统:例如电路、电机等。
•热力系统:例如锅炉、冷却系统等。
•化工系统:例如反应器、蒸馏塔等。
针对不同的控制系统对象,我们需要选择合适的数学模型来描述其动态特性,并进一步分析系统的稳定性、性能等指标。
第二章2.1 控制系统的数学模型控制系统的数学模型描述了物理系统的动态特性和输入与输出之间的关系。
常见的控制系统数学模型包括:•模型中几何图形法:通过几何图形来描述系统的动态特性。
•传递函数法:采用以系统输入和输出的转移函数来描述系统的动态特性。
•状态方程法:将系统的状态变量与输入变量和输出变量之间的关系用一组偏微分方程或代数方程来描述。
在使用这些模型时,我们可以选择合适的数学工具进行分析和求解,例如微积分、线性代数等。
2.2 传递函数的定义和性质传递函数是描述控制系统输入输出关系的数学函数,通常用G(s)表示。
传递函数的定义和性质如下:•定义:传递函数G(s)是系统输出Y(s)和输入U(s)之间的比值,即G(s) = Y(s)/U(s)。
•零点和极点:传递函数可以有零点和极点,零点是使得传递函数为零的s值,极点是使得传递函数为无穷大的s值。
太原理工大学机械工程控制基础第三章习题答案
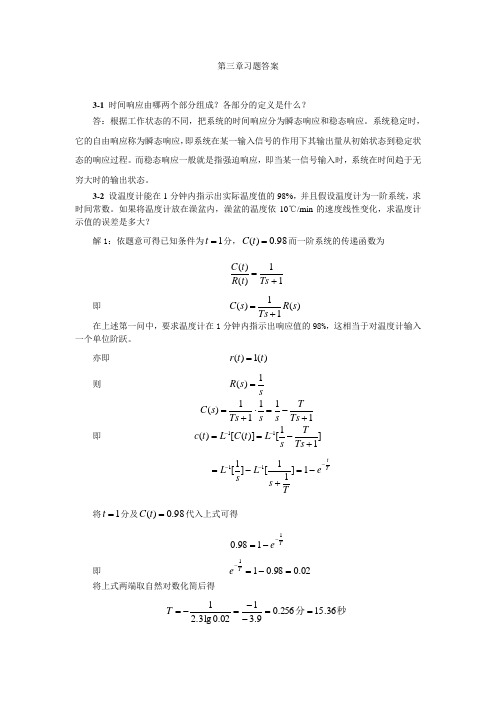
第三章习题答案3-1 时间响应由哪两个部分组成?各部分的定义是什么?答:根据工作状态的不同,把系统的时间响应分为瞬态响应和稳态响应。
系统稳定时,它的自由响应称为瞬态响应,即系统在某一输入信号的作用下其输出量从初始状态到稳定状态的响应过程。
而稳态响应一般就是指强迫响应,即当某一信号输入时,系统在时间趋于无穷大时的输出状态。
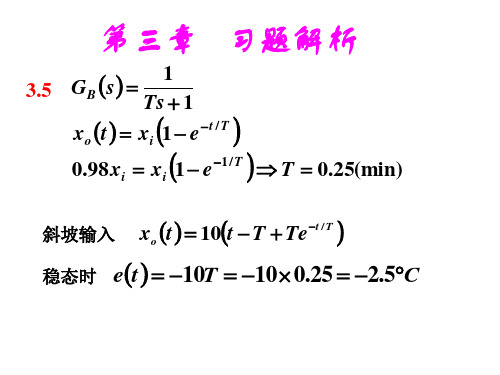
3-2 设温度计能在1分钟内指示出实际温度值的98%,并且假设温度计为一阶系统,求时间常数。
如果将温度计放在澡盆内,澡盆的温度依10℃/min 的速度线性变化,求温度计示值的误差是多大?解1:依题意可得已知条件为1=t 分,98.0)(=t C 而一阶系统的传递函数为11)()(+=Ts t R t C 即 )(11)(s R Ts s C +=在上述第一问中,要求温度计在1分钟内指示出响应值的98%,这相当于对温度计输入一个单位阶跃。
亦即 )(1)(t t r =则 s s R 1)(=11111)(+-=⋅+=Ts Ts s Ts s C即 ]11[)]([)(11+-==--Ts T s L t C L t c T te Ts L s L ----=+-=1]11[]1[11将1=t 分及98.0)(=t C 代入上式可得Te1198.0--=即 02.098.011=-=-Te将上式两端取自然对数化简后得秒分36.15256.09.3102.0lg 3.21==--=-=T解2:在第二问中已知澡盆温度以分/10线性变化,说明输入函数t At t r 10)(==,为斜坡函数,此时温度计的误差为)()()()(t c At t c t r t e -=-=而当 At t r =)( 时2)(s A s R =即 ]11[11)(11)(222++-=⋅+=+=Ts T s T s A s A Ts s R Ts s C 则 ]11[)()(211211++-==----Ts T L s T L s L A s C L t C )(]1111[1121T tTe T t A Ts TL s TLs L A ----+-=++-= 即 )1()()(Tt Tt e AT TeT t A At t e ---=+--=将已知和已求得之值1=t 分、0.256T =分、10=A 代入上式即可求得温度计的误差为()100.2560.98 2.53e t =⨯⨯= 。
控制工程基础第三版课后答案
控制工程基础第三版课后答案第一章简介1.1 控制工程概述控制工程是通过对物理过程或系统进行测量和调整,以实现期望的状态或行为。
它涉及到多个学科,包括数学、物理学、计算机科学等。
控制工程的目标是通过设计和实现反馈系统,使物理过程或系统达到期望的状态或行为。
1.2 控制系统的基本概念控制系统由输入、处理和输出三个基本要素组成。
输入是系统接收的信息或指令,处理是对输入信息进行处理和计算,输出是系统对处理结果产生的响应。
控制系统还包括传感器、执行器和控制器等组件。
1.3 控制系统的分类根据控制系统的特性和实现方式,控制系统可分为开环控制系统和闭环控制系统。
开环控制系统的输出不受系统状态的影响,闭环控制系统则通过测量系统状态并与期望状态进行比较,控制系统的输入来调整系统的行为。
第二章数学基础2.1 线性代数线性代数是控制工程的基础,它涉及到向量、矩阵、线性方程组等概念和运算。
控制系统的建模和分析中经常使用线性代数的方法进行求解和分析。
2.2 微积分微积分是控制工程的另一个基础,它涉及到函数、极限、导数和积分等概念和运算。
控制系统的建模和分析中经常使用微积分的方法进行求解和分析。
2.3 概率统计概率统计是控制工程中用来描述不确定性和随机性的工具。
控制系统的建模和分析中经常使用概率统计的方法进行不确定性的建模和分析。
第三章控制系统的数学表示3.1 传递函数表示法传递函数是描述控制系统输入和输出关系的一种表示方法。
传递函数可以通过对系统进行建模和实验来获得。
3.2 状态空间表示法状态空间表示是描述控制系统状态和动力学行为的一种表示方法。
状态空间表示可以通过系统的状态方程和输出方程来获得。
第四章控制系统的分析方法4.1 频域分析频域分析是通过对控制系统的输入和输出信号进行频率分析来获得系统的频率响应和稳定性等性能指标。
4.2 时域分析时域分析是通过对控制系统的输入和输出信号进行时域分析来获得系统的时域响应和稳定性等性能指标。
控制工程基础第3章习题解答
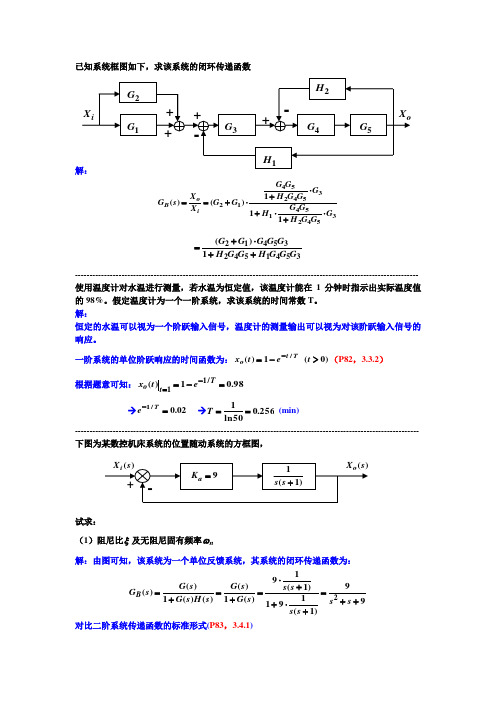
已知系统框图如下,求该系统的闭环传递函数354254135425412111)()(G G G H G G H G G G H G G G G X X s G io B ⋅+⋅+⋅+⋅+==3541542354121)(G G G H G G H G G G G G ++⋅+=---------------------------------------------------------------------------------------------------------------------- 使用温度计对水温进行测量,若水温为恒定值,该温度计能在1分钟时指示出实际温度值的98%。
假定温度计为一个一阶系统,求该系统的时间常数T 。
解:恒定的水温可以视为一个阶跃输入信号,温度计的测量输出可以视为对该阶跃输入信号的响应。
一阶系统的单位阶跃响应的时间函数为:)0(1)(/>-=-t e t x T t o (P82,3.3.2) 根据题意可知:98.01)(/11=-=-=Tt o e t x→02.0/1=-T e →256.050ln 1==T (min) ---------------------------------------------------------------------------------------------------------------------- 下图为某数控机床系统的位置随动系统的方框图,试求:(1)阻尼比ξ及无阻尼固有频率n ω解:由图可知,该系统为一个单位反馈系统,其系统的闭环传递函数为:99)1(191)1(19)(1)()()(1)()(2++=+⋅++⋅=+=+=s s s s s s s G s G s H s G s G s G B 对比二阶系统传递函数的标准形式(P83,3.4.1)2222nn nsωξωω++可得该系统的阻尼比ξ及无阻尼固有频率n ω为:61,3==ξωn (2)该系统的p M ,p t ,s t ,N13611312≈-=-==πξωπωπn d p t (P90,3.4.15) %53%100%1003611/6121/≈⨯=⨯=----πξξπe eM p (P90,3.4.17)若令02.0=∆,84=≈ns t ξω(P91,3.4.22), 7.3122≈-=πξξN (P91,3.4.25)若令05.0=∆,63=≈ns t ξω(P91,3.4.23),8.215.12≈-=πξξN (P91,3.4.26)---------------------------------------------------------------------------------------------------------------------- 要使下图所示系统的单位阶跃响应的最大超调量等于25%,峰值时间p t 为2秒,试确定K 和f K 的值解:由图可知,该系统的闭环传递函数为:Ks K K s K s K sK s K s H s G s G s G f f B +⋅+=+⋅⋅+⋅=+=222)1(111)()(1)()( 对比二阶系统传递函数的标准形式2222nn n sωξωω++可得该系统的阻尼比ξ及无阻尼固有频率n ω为:2,KK K fn ==ξω由题意, 令:%2521/==--ξξπeM p ,即4ln 12=-ξξπ解得:4.0=ξ令:()24.01122=-=-==K t nd p πξωπωπ 解得:93.2=K再由:293.22f fK K K ==4.0=ξ 解得:467.0=f K----------------------------------------------------------------------------------------------------------------------单位反馈系统的开环传递函数为)10)(5(2)(+++=s s s K s G K 其输入为单位斜坡输入(单位恒速输入)时,系统的稳态误差02.0=ss e ,求所需的K 值 解:由于系统为单位反馈系统,其稳态偏差与稳态误差相同(P98,3.6.4),即ss ss e ε= 将)(s G K 写为标准形式)11.0)(12.0(50/)2()(+++=s s s K s G K (P100,3.6.12)当输入为单位斜坡输入时,其稳态偏差为:02.050/)2(1=+=K e ss (P101,P102,表3.6.1)求得所需的K 值为2498~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~·· 3.9 3.10 3.11 3.18。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章 习题及答案传递函数描述其特性,现在用温度计测量盛在容器内的水温。
发现需要时间才能指示出实际水温的98%的数值,试问该温度计指示出实际水温从10%变化到90%所需的时间是多少?解: 41min, =0.25min T T =2.已知某系统的微分方程为)(3)(2)(3)(t f t f t y t y +'=+'+'',初始条件2)0( , 1)0(='=--y y ,试求:⑴系统的零输入响应y x (t );⑵激励f (t ) (t )时,系统的零状态响应y f (t )和全响应y (t );⑶激励f (t ) e 3t(t )时,系统的零状态响应y f (t )和全响应y (t )。
解:(1) 算子方程为:)()3()()2)(1(t f p t y p p +=++3.已知某系统的微分方程为)(3)(')(2)(' 3)(" t f t f t y t y t y +=++,当激励)(t f =)(e 4t tε-时,系统的全响应)()e 61e 27e314()(42t t y t t tε-----=。
试求零输入响应y x (t )与零状态响应y f (t )、自由响应与强迫响应、暂态响应与稳态响应。
解:4. 设系统特征方程为:0310126234=++++s s s s 。
试用劳斯-赫尔维茨稳定判据判别该系统的稳定性。
解:用劳斯-赫尔维茨稳定判据判别,a 4=1,a 3=6,a 2=12,a 1=10,a 0=3均大于零,且有 所以,此系统是稳定的。
5. 试确定下图所示系统的稳定性.解:210110(1)(1)(). ()210(21)1(1)s s s s a G s s s s s s s +++=⋅=⨯+++ 系统稳定。
满足必要条件,故系统稳定。
6.已知单位反馈系统的开环传递函数为)12.001.0()(2++=s s s Ks G ξ,试求系统稳定时,参数K 和ξ的取值关系。
解:2()(0.010.21)0D s s s s k ξ=+++=由Routh 表第一列系数大于0得0020k k ξξ>⎧⎪>⎨⎪<⎩,即)0,0(20>><k k ξξ-1,求K 值应取的范围。
解:系统特征方程为要使系统特征根实部小于1-,可以把原虚轴向左平移一个单位,令1+=s w ,即 1-=w s ,代入原特征方程并整理得 运用劳斯判据,最后得8. 设系统的闭环传递函数为 222()2nc n nG s s s ωξωω=++,试求最大超调量σ%=9.6%、峰值时间tp=0.2秒时的闭环传递函数的参数ξ和ωn 的值。
解:∵%100%21⨯=--ξξπσe=9.6%∴ξ=0.6 ∵t p =πωξn 12-=0.2∴ωn =πξt p 13140210622-=-=...19.6rad/s9.设单位负反馈系统的开环传递函数为 )6(25)(+=s s s G k求(1)系统的阻尼比ζ和无阻尼自然频率ωn ;(2)系统的峰值时间t p 、超调量σ%、 调整时间t S (△=0.02);解:系统闭环传递函数2562525)6(25)6(251)6(25)(2++=++=+++=s s s s s s s s s G B 与标准形式对比,可知 62=n w ξ ,252=n w故 5=n w , 6.0=ξ 又 46.015122=-⨯=-=ξn d w w10. 一阶系统结构图如下图所示。
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
解 由结构图写出闭环系统传递函数 令闭环增益212==ΦK K , 得:5.02=K 令调节时间4.03321≤==K K T t s ,得:151≥K 。
11.设某高阶系统可用下列一阶微分方程:T c t c t r t r t ••+=+()()()()τ近似描述,其中,1)(0<-<τT 。
试证系统的动态性能指标为:T T T t d ⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=τln 693.0; t T r =22. ; T T T t s ⎥⎦⎤⎢⎣⎡-+=)ln(3τ 解 设单位阶跃输入ss R 1)(= 当初始条件为0时有:11)()(++=Ts s s R s C τ 1) 当 t t d = 时12=--T T e t T d τ/ ; Tt T T d -⎪⎭⎫ ⎝⎛-=-τln 2ln 2) 求t r (即)(t c 从1.0到9.0所需时间)当 Tt eTT t h /219.0)(---==τ; t T T T 201=--[ln()ln .]τ 当 Tt eTT t h /111.0)(---==τ; t T T T 109=--[ln()ln .]τ 则 t t t T T r =-==21090122ln ... 3) 求 t s12. 已知系统的特征方程,试判别系统的稳定性,并确定在右半s 平面根的个数及纯虚根。
(1)01011422)(2345=+++++=s s s s s s D (2)0483224123)(2345=+++++=s s s s s s D (3)022)(45=--+=s s s s D(4)0502548242)(2345=--+++=s s s s s s D解(1)1011422)(2345+++++=s s s s s s D =0Routh : S 5 1 2 11 S 4 2 4 10 S 3 ε 6 S 2 εε124- 10S 6 S 0 10第一列元素变号两次,有2个正根。
(2)483224123)(2345+++++=s s s s s s D =0 Routh : S 5 1 12 32S 4 3 24 48S 33122434⨯-= 32348316⨯-= 0 S2 424316412⨯-⨯= 48 S 1216448120⨯-⨯= 0 辅助方程 124802s +=,S 24 辅助方程求导:024=sS 0 48系统没有正根。
对辅助方程求解,得到系统一对虚根 s j 122,=±。
(3)022)(45=--+=s s s s DRouth : S 5 1 0 -1S 4 2 0 -2 辅助方程 0224=-s S 3 8 0 辅助方程求导 083=sS 2 ε -2 S ε16S 0 -2第一列元素变号一次,有1个正根;由辅助方程0224=-s 可解出: (4)0502548242)(2345=--+++=s s s s s s D Routh : S 5 1 24 -25S 4 2 48 -50 辅助方程 05048224=-+s s S 3 8 96 辅助方程求导 09683=+s sS 2 24 -50 S 338/3S 0 -50第一列元素变号一次,有1个正根;由辅助方程05048224=-+s s 可解出:13.已知单位反馈控制系统开环传递函数如下,试分别求出当输入信号为)(1t 、t 和2t 时系统的稳态误差。
⑴)15.0)(11.0(10)(++=s s s G⑵)22)(4()3(7)(2++++=s s s s s s G 解: ⑴ 1010()0(0.11)(0.51)K G s v s s =⎧=⎨=++⎩ ()(0.11)(0.51)100D s s s =+++=经判断系统稳定⑵ 273217(3)()428(4)(22)1K s G s s s s s v ⨯⎧==+⎪=⨯⎨+++⎪=⎩ 经判断:系统不稳定。
14.已知单位负反馈系统的开环传递函数如下: 求:(1) 试确定系统的型次v 和开环增益K ;(2)试求输入为t t r 31)(+=时,系统的稳态误差。
解:(1)将传递函数化成标准形式 可见,v =1,这是一个I 型系统 开环增益K =50;(2)讨论输入信号,t t r 31)(+=,即A =1,B =3 误差06.006.00503111=+=+∞+=++=V p ss K B K A e15. 已知单位负反馈系统的开环传递函数如下: 求:(1) 试确定系统的型次v 和开环增益K ;(2)试求输入为2425)(t t t r ++=时,系统的稳态误差。
解:(1)将传递函数化成标准形式可见,v =2,这是一个II 型系统 开环增益K =100; (2)讨论输入信号,2425)(t t t r ++=,即A =5,B =2, C=4 误差04.004.00010042151=++=+∞+∞+=+++=a V p ss K C K B K A e16.在许多化学过程中,反应槽内的温度要保持恒定, 图(a )和(b )分别为开环和闭环温度控制系统结构图,两种系统正常的K 值为1。
⑴若)(1)(t t r =,0)(=t n 两种系统从响应开始达到稳态温度值的63.2%各需多长时间? ⑵当有阶跃扰动1.0)(=t n 时,求扰动对两种系统的温度的影响。
解 (1)对(a )系统: 1101110)(+=+=s s K s G a , 时间常数 10=T632.0)(=T h (a )系统达到稳态温度值的63.2%需要10个单位时间;对(a )系统:11011010110010110100)(+=+=Φs s s b , 时间常数 10110=T632.0)(=T h (b )系统达到稳态温度值的63.2%需要0.099个单位时间。
(2)对(a )系统: 1)()()(==s N s C s G n 1.0)(=t n 时,该扰动影响将一直保持。
对(b )系统: 1011011011010011)()()(++=++==Φs s s s N s C s n 1.0)(=t n 时,最终扰动影响为001.010111.0≈⨯。
)(t h 和调节时间t s 。
解:依题,系统闭环传递函数421=T T , ∴3.33.3111==⎪⎪⎭⎫ ⎝⎛=T T T t t s s 。
18. 设下图(a )所示系统的单位阶跃响应如图(b )所示。
试确定系统参数,1K 2K 和a 。
解:由系统阶跃响应曲线有 系统闭环传递函数为222212212)(nn n s s K K as s K K s ωξωω++=++=Φ (1) 由 ⎪⎩⎪⎨⎧===-=--o o oo np e t 3.331.01212ξξπσωξπ 联立求解得 ⎩⎨⎧==28.3333.0n ωξ 由式(1)⎩⎨⎧====222110821n n a K ξωω另外 3lim 1)(lim )(2122100==++=⋅Φ=∞→→K K as s K K s s s h s s 19. 设角速度指示随动系统结构图如下图所示。