四轴机器人控制系统设计
毕业设计四自由度机器人

毕业设计四自由度机器人毕业设计题目:四自由度机器人的设计与控制一、引言四自由度机器人是一种常见的工业机器人,其基础结构包括底座、臂部、腕部和末端执行器。
在工业生产线上,四自由度机器人广泛应用于装配、焊接、喷涂等需要精确操作的工艺环节。
本篇毕业设计论文将对四自由度机器人的设计与控制进行研究和分析。
二、机器人的设计1.结构设计:为了实现机器人的灵活和精确操作,我们将设计一个四自由度机器人。
该机器人的结构由底座、臂部、腕部和末端执行器组成。
底座提供了机器人的稳定性和机动性,臂部负责机器人进行大范围的空间运动,腕部通过关节连接臂部和末端执行器,末端执行器完成具体的操作任务。
2.运动学设计:机器人的运动学设计是机器人设计中的重要一环。
我们将采用世界坐标系和本体坐标系的方法,建立逆运动学模型和正运动学模型,以实现机器人的运动控制。
具体设计中,我们将采用符号法推导机器人的运动学方程,通过求解并进行数值模拟验证,实现机器人的精确运动。
三、机器人的控制1.控制系统设计:机器人的控制系统是实现机器人精确操作的核心。
我们将采用开环控制和闭环控制相结合的方法,设计机器人的控制系统。
开环控制系统通过预设关节角度实现机器人的运动,闭环控制系统通过传感器反馈实时监控机器人的运动,并进行误差修正,实现机器人的精确操作。
2.控制算法设计:我们将采用PID控制算法对机器人进行控制。
PID控制算法具有稳定性好、计算简单等优点,适用于工业机器人的控制。
我们将根据机器人的运动学特性,根据机器人的误差信号设计合适的PID参数,以优化机器人的运动轨迹和操作精度。
3.编程与仿真设计:为了验证机器人的设计和控制系统的有效性,我们将使用MATLAB和Simulink进行编程和仿真设计。
通过编写机器人运动学模型和控制算法的代码,并在Simulink中搭建机器人的控制系统,实现机器人精确操作的仿真。
四、总结本篇毕业设计论文对四自由度机器人的设计与控制进行了研究和分析。
基于PMAC的四轴桁架机械手控制系统设计与研究

然而,尽管本次演示的研究取得了一定的成果,但仍存在一些不足之处,例 如未考虑复杂的生产环境对控制系统性能的影响。未来研究方向可以包括拓展控 制算法以适应更复杂的生产环境和提高机械手的自适应性。
参考内容
引言
四轴飞行器是一种具有广泛应用前景的无人机,其控制系统对于飞行器的稳 定性和精度具有至关重要的作用。随着科技的不断进步,嵌入式技术逐渐成为四 轴飞行器控制系统的重要发展方向。本次演示将围绕基于嵌入式的四轴飞行器控 制系统展开研究与设计进行详细阐述。
PMAC作为一种可编程自动化控制器,广泛应用于各种工业自动化设备中。近 年来,越来越多的研究基于PMAC的桁架机械手控制系统设计。这些研究主要集中 在运动学模型建立、动力学分析、传感器融合等方面。此外,一些研究还了控制 策略的设计,以实现更精确和灵活的机械手控制。
研究方法
本次演示在设计和实现基于PMAC的四轴桁架机械手控制系统时,主要考虑了 以下因素:
基于PMAC的四轴桁架机械手控 制系统设计与研究
01 摘要
03 文献综述
目录
02 引言 04 研究方法
目录
05 结果与讨论
07 参考内容
06 结论
摘要
本次演示主要研究了基于PMAC(Programmable Machine Automation Controller)的四轴桁架机械手控制系统的设计与实现。针对工业生产中的桁架 机械手控制问题,本次演示提出了一种新的控制策略,旨在提高机械手的运动精 度、稳定性和灵活性。通过实验验证,本次演示所设计的控制系统在桁架机械手 应用中具有显著的优势。
感谢观看
引言
桁架机械手在现代化工业生产中扮演着举足轻重的角色,尤其在精密制造、 自动化生产线等领域发挥着重要作用。为了满足工业生产不断提高的精度和效率 要求,针对桁架机械手的控制系统设计显得尤为重要。本次演示旨在研究基于 PMAC的四轴桁架机械手控制系统的设计与实现,以期提高机械手的运动性能。
四自由度机械手控制系统设计
前言可编程控制器是20世纪70年代以来,在集成电路,计算机技术基础上发展起来的一种新型工业控制设备。
由于具有功能强、可靠性高、配置灵活、使用方便以及体积小、重量轻等优点,国外已广泛应用于自动化控制的各个领域,并已成为现实工业生产自动化的支柱产品。
近年来,国内在PLC技术与产品开发应用方面发展很快,除有许多从国外引进的设备,自动化生产线外,国内的机床设备已越来越多采用PLC控制系统采用控制系统取代传统的继电—接触器控制系统小;价格上能与继电—接触器控制系统竞争;易于在现场变更程序;便于使用、维护、维修;能直接推动电磁阀,接触器与之相当的执行机构;能向中央执行机构;能向中央数据处理系统直接传播数据等。
本课题是基于PLC控制四自由度机械手运行。
工业机械手是一种模仿人体上肢部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,它可以代替手的繁重劳动,改善劳动条件,提高劳动生产率和自动化水平。
有着广阔的发展前途。
本课题通PLC自动控制对机械手实现机械手规定动作并实现回原点、手动方式和自动方式三种工作方式的选择,并对系统进行运行效率分析。
摘要随着工业机械手的进一步发展,其发展将更趋向于人性化、智能化并将在更加广泛的领域得到应用。
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力,受到人们的广泛重视和欢迎。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。
通过对机械制造与自动化大学专科三年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,确定机械手的工作原理和运动机理。
设计了一种四自由度机械手,采用可编程序控制器(PLC)设计其控制系统,以提高其工作的稳定性能。
关键词:机械手梯形图PLC 电磁阀AbstractWith the further development of industrial robots, and its development tends to be more humane, intelligent and in a wider range of applications. Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role .Manipulator noted extensively and welcome by people for it has powerful vitality. Industrial robots can replace the hands of heavy labor, significantly reduce labor intensity, and improve labor productivity and automation level.Mechanical manufacturing and automation through the junior college for three years to integrate the knowledge of industrial manipulator mechanical structure and function of various parts of exposition and analysis to determine the robot motion principle and mechanism. Design a four-DOF manipulator to enhance the stability of their work for using the programmable logic controller to control system.Keywords: Manipulator Ladder diagram PLC Solenoid valve目录前言 (1)摘要 (2)第一章绪论 (5)1.1 本课题设计的背景 (5)1.2本课题设计的内容 (6)1.3 本课题设计的目的和意义 (7)第二章 PLC的概述 (8)2.1 PLC介绍 (8)2.2 PLC的构成 (9)2.3 PLC 的外部设备 (10)2.4 PLC的工作原理 (10)2.5 PLC的优点 (12)第三章基于PLC的机械手控制方案的确定 (13)3.1 机械手的概述 (13)3.2 采用PLC控制机械手的优点 (13)3.3 机械手设计内容 (13)3.4 PLC的选型 (14)3.5 三菱FX系列的结构功能 (16)第4章功能实现与控制方式 (18)4.1 机械手模型的机能和特性 (18)4.2 夹紧机构 (18)4.3 躯干 (19)4.4 旋转编码盘 (19)第5章控制系统设计 (20)5.1 控制系统硬件设计 (20)5.2 PLC梯形图中的编程元件 (20)5.3 PLC的I/O分配 (21)5.4 机械手控制系统的外部接线图 (22)5.5 控制系统软件设计 (22)致谢 (36)参考文献 (37)附录(指令表) (38)第一章绪论1.1 本课题设计的背景1969年美随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。
四轴联动机械手plc控制系统设计

分类号:TP29编号:BY15 5152 11/12/2 14-0801XXXX大学本科毕业论文题目:四轴联动简易机械手PLC控制系统设计院系: xxxx学院专业:电气工程及其自动化班级:学生姓名:指导教师:论文提交日期: 2012 年 6 月 21日论文答辩日期:2012 年 6 月 26日毕业设计(论文)任务书电气工程及其0801班学生:自动化专业摘要可编程序控制器(Programmable logic controller)简称PLC,因其可靠性高、环境适应性强、灵活通用、使用方便、维护简单,应用领域在迅速扩大。
尤其是近几年来,PLC的成本下降,功能又不断增强,在国内外已被广泛应用于各个行业,已经与工业生产完美的结合在一起。
机械工业的发展中,机械手已经广泛应用在各种自动化生产线上。
搬运机械手的控制一直是机械手领域重要的研究课题之一。
机械手作为一种重要的工业设备,在当今工业生产中占着举足轻重的位置本次设计以某机械手模型作为平台,设计控制系统。
该系统利用步进电动机单位脉冲所具有的步进距离不变的特点,对其采用开环点位控制,将整个运动视为折线运动,每一个动作可视为运动程序相同、特征参数各异的点位相对运动。
其中如何用PLC准确的控制步进电机的位置与速度将成为本次设计的难点。
本文重点分析了基于PLC的机械手控制系统组成,根据课题的控制要求,确定搬运机械手的控制方案,设计控制系统电气原理图,进行控制系统电气元器件选型,完成PLC用户程序的设计,通过模拟调试,有序的控制物料从生产流水线上安全搬离,提高搬运工作的准确性、安全性,实现一套完整的生产线,使制造过程变的更有效率。
关键词:机械手; PLC; 步进电机; 梯形图AbstractProgrammable is referred as to the PLC. With the high reliability, adaptability in environment and flexibility, the PLC is widely used and expanding in the fields of application. Especially in recent years, the low cost, increased feature without enhancement, therefore, he current PLC has been widely used in various industries inland and abroad,and has been with the industry production perfectly unifies in together.With the development of Machinery industry, the manipulator has been used widely in various automatic production lines. Carrying manipulator control has been important research problem in manipulator field. As an important industrial equipment, manipulator is a decisive position in the modern industrial production.This design with a manipulator model as a platform, design control system . The system used by the Stepping Motor unit pulse of step with the characteristics of the same distance from their point of using open-loop control. So the whole movement could be seen as broken line movement, every action can be considered the same as sports, characteristics of different parameters of the point of relative movement. Among them how to use PLCaccurate control of the stepping motor's position and speed will be the difficulty of this designThis paper mainly analyzes the robot control system based on PLC composition. According to the control requirements, determine the subject of carrying manipulator control plan, design control system to control electrical diagram, electrical components selection, complete system user program design, PLC, ordered by simulative debugging of control the material move out from production lines and improve the safety of the accuracy, security, realize a complete set of production line, make manufacturing process become more efficient.Key Words: Manipulator;PLC;Stepping motor;Ladder-diagram目录第一章绪论 (1)1.1机械手的现状 (1)1.2机械手的发展 (1)1.3 PLC的发展概况 (2)1.4 PLC的定义 (2)1.5 PLC的特点 (3)1.6 PLC的工作原理 (4)1.7 课题的目的和意义 (5)第二章机械手控制系统方案设计 (7)2.1 设计介绍 (7)2.2 机械手基本结构 (7)2.3 机械手运行的工艺过程 (8)2.4 控制方案设计 (9)第三章控制系统硬件设计 (10)3.1 PLC的选型及参数 (10)3.2 电气元器件的选型及参数 (11)3.2.1 步进电机的选型 (11)3.2.2 步进电机驱动 (12)3.2.3 直流减速电机 (13)3.2.4 继电器 (13)3.2.5 光电开关 (13)3.2.6 行程开关 (14)3.2.7 低压断路器 (14)3.2.8 控制按钮 (14)3.2.9 熔断器 (14)3.3 PLC外部接线图 (15)3.3.1 机械手电源回路 (15)3.3.2 机械手输入信号回路 (16)3.3.3 机械手输出信号回路 (16)3.4 PLC控制的安装与布线 (17)第四章机械手控制系统程序设计 (19)4.1 设计任务及要求 (19)4.2 机械手运动示意图 (19)4.3 I/O分配 (20)4.4 编程设计思路 (21)4.4.1 最大速度和启动/停止速度 (21)4.4.2 PTOx_CTRL子程序 (22)4.3.3 PTOx_RUN子程序 (22)4.4.4 PTOx_MAN子程序 (23)4.5 步进电机脉冲数的计算 (24)第五章模拟调试 (26)5.1 仿真软件调试 (26)5.2 实验室调试 (28)设计总结 (30)参考文献 (31)致谢 (32)沈阳化工大学学士学位论文第一章绪论第一章绪论1.1 机械手的现状机械手是在机械化、自动化生产过程中发展起来的一种具有抓取和移动工件功能的新型装置。
09-10四自由度码垛机器人控制系统设计

四自由度码垛机器人控制系统设计一、四自由度码垛机器人简介随着科技工业自动化的发展,很多轻工业都相继通过自动化流水线作业.尤其是食品工厂,后道包装机械作业使用一些成套设备不仅效率提高几十倍,生产成本也降低了。
其中四自由度码垛机器人每天自动对1000箱食品进行托盘处理,这些码垛机器人夜以继日地工作,从不要求增加工资。
码垛机器人的应用越来越广。
码垛机器人配备有特殊定制设计的多功能抓取器,不管包装箱尺寸或重量如何,机器人都可以使用真空吸盘牢固地夹持和传送包装箱。
如图1所示,四自由度码垛机器人本体由腰部、大臂、小臂、腕部组成。
图1 码垛机器人简图腰部大臂小臂腕部如图2所示,码垛机器人具有独特的线性执行机构,使其保证了手部在水平与垂直方向的平行移动。
图2 码垛机器人的线性执行机构运动示意图此四自由度码垛机器人的应用案例如图3所示。
具有示教作业简单,现场操作简便。
图3 码垛机器人的应用案例二、四自由度码垛机器人控制要求及其控制方案1、控制要求如图1所示,四自由度码垛机器人的运动主要由控制腰部、大臂、小臂、腕部的驱动电机实现。
在此均采用松下A5伺服电机;抓取部件等其他辅助运动采用气动,由电磁阀动作来控制抓取部件的动作。
四自由度码垛机器人的运动控制系统主要包括感知部分、硬件部分和软件部分,其运动控制系统的主要任务是要控制此机器人在工作空间中的运动位置、姿态和轨迹以及作业流程等。
此外,还要求:1)防碰撞检测和在线编程控制,可以进行离线仿真;2)人机界面友善、高度可靠作性和安全性;3)便携式触摸屏示教器、全中文界面;4)利用使能开关双电路设计使在紧急状态下自动切断伺服动作,从而保证安全。
2、控制方案控制方案1:基于PLC的运动控制方案基于PLC的机器人运动控制系统,一般利用触摸屏进行人机交互。
在触摸屏上的人机界面,由组态软件编写人机操作界面实现人机交互;PLC则通过I/O 模块与码垛机器人以及现场设备通信并实现控制,通过接受PLC的控制命令,实现机器人及其周边、物流设备的启停与协调,同时将码垛机器人及其周边、物流设备的运行状态返回给PLC。
视觉导航的四轴飞行器控制系统设计
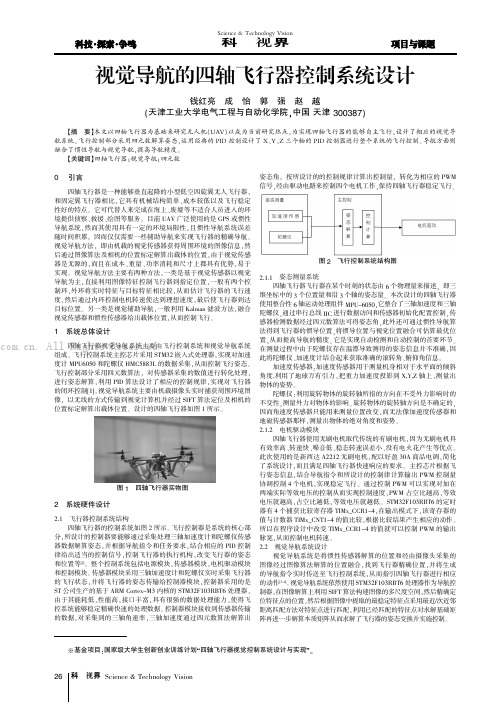
Science &Technology Vision 科技视界0引言四轴飞行器是一种能够垂直起降的小型低空四旋翼无人飞行器,和固定翼飞行器相比,它具有机械结构简单、成本较低以及飞行稳定性好的特点。
它可代替人来完成在海上、废墟等不适合人员进入的环境提供侦察、救援、绘图等服务。
目前UAV 广泛使用的是GPS 或惯性导航系统,然而其使用具有一定的环境局限性,且惯性导航系统误差随时间积累,因而仅仅需要一些辅助导航来实现飞行器的精确导航。
视觉导航方法,即由机载的视觉传感器获得周围环境的图像信息,然后通过图像算法及相机的位置标定解算出载体的位置,由于视觉传感器是无源的,而且在成本、重量、功率消耗和尺寸上都具有优势,易于实现。
视觉导航方法主要有两种方法,一类是基于视觉传感器以视觉导航为主,直接利用图像特征控制飞行器到指定位置,一般有两个控制环,外环将实时特征与目标特征相比较,从而估计飞行器的飞行速度,然后通过内环控制电机转速使达到理想速度,最后使飞行器到达目标位置。
另一类是视觉辅助导航,一般利用Kalman 滤波方法,融合视觉传感器和惯性传感器给出载体位置,从而控制飞行。
1系统总体设计四轴飞行器视觉导航系统主要由飞行控制系统和视觉导航系统组成。
飞行控制系统主控芯片采用STM32嵌入式处理器,实现对加速度计MPU6050和陀螺仪HMC5883L 的数据采集,从而控制飞行姿态。
飞行控制部分采用四元数算法,对传感器采集的数值进行转化处理,进行姿态解算,利用PID 算法设计了相应的控制规律,实现对飞行器的闭环控制[1]。
视觉导航系统主要由机载摄像头实时捕获周围环境图像,以无线的方式传输到视觉计算机并经过SIFT 算法定位及相机的位置标定解算出载体位置。
设计的四轴飞行器如图1所示。
图1四轴飞行器实物图2系统硬件设计2.1飞行器控制系统结构四轴飞行器的控制系统如图2所示。
飞行控制器是系统的核心部分,所设计的控制器要能够通过采集处理三轴加速度计和陀螺仪传感器数据解算姿态,并根据导航指令和任务要求,结合相应的PID 控制律给出适当的控制信号,控制飞行器的执行机构,改变飞行器的姿态和位置等[2]。
四轴机器人集成方案流程
四轴机器人集成方案流程一、介绍四轴机器人是一种具有四个旋转关节的机器人系统,可以通过控制四个关节的运动实现灵活的动作。
在工业生产、医疗服务、教育等领域,四轴机器人都有着广泛的应用。
本文将详细介绍四轴机器人集成方案的流程。
二、需求分析在开始制定四轴机器人集成方案之前,需要进行需求分析,明确系统的功能和性能要求。
需求分析包括以下几个方面:2.1 功能需求•确定四轴机器人的基本功能,如运动、抓取、识别等。
•确定机器人的自主性需求,是否需要具备自主导航和决策能力。
2.2 性能需求•确定机器人的运动速度、精度和可重复性要求。
•确定机器人的承重能力和工作环境要求。
2.3 安全需求•确定机器人的安全性能要求,如急停功能、碰撞检测等。
•确定机器人与人员或其他设备的安全交互方式。
三、方案设计基于需求分析的结果,进行四轴机器人集成方案的设计。
方案设计包括以下几个步骤:3.1 机械设计根据功能需求和性能需求,设计四轴机器人的机械结构。
机械设计要考虑机器人的稳定性、刚度和负载能力,同时要尽量减小机器人的重量和体积,提高其灵活性和运动速度。
3.2 电控设计设计四轴机器人的电控系统,包括电机驱动、传感器接口等。
电控设计要保证机器人的稳定性和可靠性,同时提高其精度和可调节性。
3.3 控制算法设计设计四轴机器人的控制算法,包括轨迹规划、运动控制、抓取控制等。
控制算法的设计要考虑机器人的自主性需求,并提供友好的人机交互界面。
3.4 软件系统设计设计四轴机器人的软件系统,包括嵌入式软件和上位机软件。
软件系统设计要保证机器人的高效运行和易用性,同时提供良好的软件架构和模块化设计。
四、集成实施在设计完成后,进行四轴机器人的集成实施。
集成实施包括以下几个步骤:4.1 机械部件制造根据机械设计的要求,制造机械部件。
机械部件制造要保证其精度和质量,以保证机器人的正常运行。
4.2 电控系统搭建安装和调试电控系统,包括电机驱动、传感器接口等。
电控系统搭建要保证其稳定性和可靠性,以提供良好的控制效果。
毕业设计开题报告_四轴码垛机器人控制系统设计(模版)
毕业设计开题报告_四轴码垛机器人控制系统设计(模版)第一篇:毕业设计开题报告_四轴码垛机器人控制系统设计(模版)幻灯片1毕业设计开题报告——四自由度码垛机器人控制系统设计幻灯片2四自由度码垛机器人控制系统设计λ背景λ国内外发展现状及趋势λ控制系统λ具体实现细节与技术要点λ实践安排λ总结幻灯片3 背景介绍λ自从20世纪60年代初人类制造出第一台工业机器人后,机器人就显示出了强大的生命力。
机器人的发展及应用水平已经成为了衡量一个国家制造水平和科技发展水平的重要标志。
λ作为工业机器人的典型的一种,码垛机器人在工业应用,尤其是包装领域和物流领域正发挥着越来越大的作用。
将机器人与包装线相结合,既提高了生产线的工作效率,又增强了运行的可靠性,减少了人力资源的开支,更让当代企业迅速适应不断变化的市场要求,产生巨大的经济效益。
幻灯片4 背景介绍码垛机器人能适应于纸箱、袋装、罐装、箱体、瓶装等各种形状的包装成品码垛作业。
1.从效率上说,码垛机器人不仅能承担高负重,而且速度和质量远远高于人工。
2.从精度上看,每一台码垛机器人都有独立的控制系统,极大地保证了作业精度。
3.在成本控制方面,机器人虽然前期投入较高,但是却能达到边际成本效用最大化,且各家机器人都在为客户的成本控制而在产品中不断加入新的科技成果。
幻灯片5四自由度码垛机器人控制系统设计λ背景λ国内外发展现状及趋势λ控制系统λ具体实现细节与技术要点λ实践安排λ总结幻灯片6 国内外发展现状及趋势λ目前欧、美、日的码垛机器人在码垛市场的占有率均超过了90%,绝大数码垛作业由码垛机器人完成。
并且基本垄断了全球市场。
λ我国的工业机器人从上世纪80年代“七五”科技攻关开始起步,在国家支持下,通过“七五”“八五”“九五”科技攻关,取得了长足的进步,涌现出了一大批代表企业和产品,国外码垛机器人在我国市场一统天下的局面正在被打破。
λ幻灯片7 国内外发展现状及趋势λ但总的看来,我国的码垛机器人技术及其应用水平和国外相比还有很大差距,如可靠性低于国外同类产品,起步较晚,运动速度和精度还有很大提升空间。
基于Trio运动控制器的四自由度机器人控制系统设计的开题报告
基于Trio运动控制器的四自由度机器人控制系统设计的开题报告一、研究背景随着机器人技术的不断发展,机器人应用范围正在逐渐扩大。
而机器人控制系统作为机器人的核心部件之一,其稳定性和高效性对机器人的性能影响很大。
因此,研究新型的机器人控制系统,提高机器人的运动控制能力,成为了机器人领域的热点研究方向。
目前,普遍的机器人控制系统采用PLC、DSP等硬件进行控制,但这种控制方式存在着在多任务处理上存在困难、难以升级、维护成本高等问题。
随着计算机技术的不断发展,基于计算机的机器人控制系统逐渐成为研究的热点。
其中,基于运动控制卡的方式成为控制系统中最为流行的方式之一。
Trio运动控制器是一种基于运动控制卡的机器人控制系统,具有控制精度高、处理速度快、易于开发和维护等优点。
同时,Trio还提供了丰富的运动控制函数库和通信协议,方便了开发者进行开发和控制。
因此,将Trio运动控制器应用于机器人控制系统中,可以显著提高机器人的性能和稳定性。
二、研究内容本研究旨在设计一种基于Trio运动控制器的四自由度机器人控制系统。
具体内容包括以下几个方面:1.系统硬件设计:根据机器人的实际应用需求,选择适合的传感器和执行机构,并采用Trio运动控制器进行硬件设计。
2.系统软件设计:使用Visual C++等软件,开发程序控制界面。
界面中可包括机器人的运动轨迹规划、动态性能分析、数据采集和控制指令等功能。
3.系统测试:对设计的机器人控制系统进行测试和评估,检验其性能和可靠性。
测试内容包括机器人的工作空间、精度、速度等方面的测试。
三、研究意义本研究主要意义包括以下几个方面:1.提高机器人的运动控制精度和稳定性,增强机器人在多样化工作环境下的适应能力。
2.探索基于Trio运动控制器的机器人控制系统,为后续机器人控制系统的设计提供参考。
3.促进机器人技术的发展,推动机器人技术在生产制造、医疗、物流等领域的应用。
四、研究方法本研究主要采用实验方法和案例分析方法。
四轴机械臂设计说明书
四轴机械臂设计说明书四轴机械臂设计说明书一、引言机械臂作为工业自动化领域的重要组成部分,在生产制造、装配、搬运等环节中发挥着重要作用。
本设计说明书旨在介绍一种四轴机械臂的设计方案,提供一个生动、全面、有指导意义的设计参考。
二、机械结构设计1. 机械臂结构:本设计采用四轴结构,包括垂直旋转基座、水平旋转基座、伸缩臂和末端执行器。
垂直旋转基座和水平旋转基座通过关节连接,伸缩臂通过滑动导轨实现伸缩。
末端执行器根据不同需求可以选择夹具、吸盘等形式。
2. 驱动机构:本设计选用步进电机作为驱动源。
垂直旋转基座和水平旋转基座分别由两台步进电机驱动,伸缩臂采用导轨驱动方式。
电机控制器可通过电脑或者PLC进行控制,实现机械臂的自动化操作。
三、传感器和控制系统设计1. 位置传感器:为了实现机械臂的准确定位和运动控制,本设计在关节连接处安装光电编码器,通过检测脉冲数来计算位置和角度信息。
同时,在末端执行器处安装力传感器,用于测量夹持物体的力度。
2. 控制系统:本设计采用开源控制软件和硬件平台,例如ROS(机器人操作系统)和Arduino等。
通过编程实现机械臂的运动规划、轨迹控制、碰撞检测等功能。
四、安全性设计1. 电气安全:在设计中,遵循相关电气安全标准,合理选用电气元件和电缆。
同时,设置过载保护和短路保护装置,确保机械臂的电气安全性。
2. 机械安全:机械臂的各个部件应具备足够的强度和刚度,以承受工作过程中的负载。
在设计中,应考虑防护罩、紧急停止按钮和限位装置等安全措施,保证操作人员的安全。
五、应用场景示例1. 生产制造:机械臂能够替代人工完成重复性高、危险性大的工作任务,提高生产效率和质量。
例如,可以用于零件的搬运、组装和焊接等作业。
2. 医疗护理:机械臂在医疗领域能够承担繁琐重复的工作,例如手术器械的传递、患者护理等。
通过精准的运动控制和传感器反馈,可实现高精度操作。
六、结论通过本设计说明书的介绍,我们可以了解到一种四轴机械臂的设计方案,包括机械结构、传感器和控制系统设计,以及安全性设计和应用场景示例。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract:Afouraxisrobotmotioncontrolsystem withhumancomputerinteractionfunctionbasedonLeashinemotion controllerandtouchscreenwasdesignedanddevelopedforthemotioncontrolproblem offouraxisrobot.Firstly,the kinematicsmodeloftherobotwasestablishedbythemodifiedDHmethod,andthekinematicsanalysisoftherobotwas carriedouttoobtainthesolutionoftheforwardandinversekinematicsoftherobot.Thenthefunctionoftherobotcontrol system wasanalyzed.Thecorrespondingparametersettingmodule,statusmonitoringmodule,filemanagementmodule andmotioncontrolmoduleweredevelopedonthemotioncontroller,andthehumancomputerinteractioninterfacewas designedonthetouchscreen.Finally,byanalyzingthelinearmotionoftherobotinspace,thelinearinterpolation algorithm oftherobotwasdesigned,andthecorrespondinginterpolationmotionmodulewasdevelopedonthemotion controller.Theexperimentalverificationshowsthatthecontrolsystem caneffectivelycontrolthemotionofthefouraxis robot,andthemotionprocessisstableandreliable.Thecontrolsystem solvesthemotioncontrolproblem offouraxis robot. Keywords:fouraxisrobot;Leashinemotioncontroller;modifiedDH method;linearinterpolationalgorithm;human computerinteractioninterface
·8·
轻工机械 LightIndustryMachinery
2019年第 3期
由度工业机器人为控制对象的机器人控制系统。 以运动控制器为核心,配合外部设备构成机器人
机器人控制系统是工业机器人的核心,对机器人 的性能起 着 至 关 重 要 的 作 用[1]。 运 动 控 制 器 的 实 时 I/O控制能够保证机器人的运动精度,满足机器人控 制的要求,同时运动控制器的开放型架构和丰富的软
件接口,易于开发和扩展[2]。许阳[3]提出了一种基于 CPAC运动控制 器 的 六 轴 机 器 人 控 制 系 统,实 现 了 机 器人的控 制 系 统 的 基 本 功 能。 王 耀 东[4]研 究 了 基 于 Codesys的机器人运动控制器,并搭建了以 ER50六自
DesignofControlSystem forFБайду номын сангаасurAxisRobot
XUDayong1,2,CHENHaiwei1,2
(1.SchoolofMechanicalEngineering,JiangnanUniversity,Wuxi,Jiangsu214122,China; 2.JiangsuKeyLaboratoryofAdvancedFoodManufacturingEquipmentandTechnology,JiangnanUniversity,Wuxi,Jiangsu214122,China)
收稿日期:20181203;修回日期:20190302 第一作者简介:徐达勇(1993),男,浙江临海人,硕士研究生,主要研究方向为机电一体化、机器人控制系统研究。通信作者:陈 海卫(1982),男,河北保定人,副教授,硕士生导师,主要研究方向为机电一体化、振动与噪声、CAE分析等。Email:chenhaiwei @jiangnan.edu.cn
摘 要:针对四轴机器人运动控制问题,设计开发了一套基于雷赛运动控制器和触摸屏的具有人机交互功能的四轴机器 人运动控制系统。首先采用改良 DH法建立了机器人的运动学模型,并对机器人进行运动学分析,求得了机器人的正 逆运动学的解。然后分析划分了机器人控制系统的功能,在运动控制器上开发了相应的参数设置模块、状态监测模块、 文件管理模块和运动控制模块,并在触摸屏上设计了人机交互界面。最后通过分析机器人在空间的直线运动,设计了机 器人直线插补算法,并在运动控制器上开发了相应的插补运动模块。经实验验证,控制系统能够有效地对四轴机器人进 行运动控制,且运动过程平稳可靠。控制系统解决了四轴机器人的运动控制问题。 关 键 词:四轴机器人;雷赛运动控制器;改良 DH法;直线插补算法;人机交互界面 中图分类号:TP242.2 文献标志码:A 文章编号:10052895(2019)03000706
第 37卷 第 3期
轻工机械
Vol.37No.3
2019年 6月
LightIndustryMachinery
Jun.2019
[研究·设计]
DOI:10.3969/j.issn.10052895.2019.03.002
四轴机器人控制系统设计
徐达勇1,2,陈海卫1,2
(1.江南大学 机械工程学院,江苏 无锡 214122; 2.江南大学 江苏省食品先进制造装备技术重点实验室,江苏 无锡 214122)