基于S7-200PLC的四自由度机械手控制系统设计
《2024年基于PLC的工业机械手运动控制系统设计》范文
《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,PLC(可编程逻辑控制器)作为现代工业控制的核心设备,在工业机械手运动控制系统中扮演着越来越重要的角色。
本文旨在探讨基于PLC的工业机械手运动控制系统的设计,以实现高效、精确和可靠的机械手运动控制。
二、系统设计要求在系统设计过程中,需充分考虑以下几个方面:1. 高效性:系统应具备快速响应、高效率的特点,以满足工业生产的需求。
2. 精确性:机械手的运动轨迹和位置应精确控制,以确保产品加工的质量。
3. 可靠性:系统应具备较高的稳定性和可靠性,以降低故障率,提高生产效率。
4. 灵活性:系统应具备较好的可扩展性和可维护性,以适应不同生产需求。
三、硬件设计硬件设计是系统设计的基础,主要包括PLC控制器、传感器、执行器等部件的选型和配置。
1. PLC控制器:选用高性能、高可靠性的PLC控制器,具备强大的逻辑运算、数据处理和通信功能。
2. 传感器:根据机械手运动控制的需求,选用合适的传感器,如位置传感器、速度传感器等,以实现精确的位置和速度检测。
3. 执行器:包括电机、气缸等执行机构,根据机械手的运动需求进行选型和配置。
4. 其他部件:包括电源、保护装置、通信接口等,以确保系统的正常运行和通信。
四、软件设计软件设计是系统设计的核心,主要包括PLC程序的编写和调试。
1. 程序编写:根据机械手运动控制的要求,编写相应的PLC 程序,实现逻辑控制、数据处理和通信功能。
2. 程序调试:对编写的程序进行调试,确保程序的正确性和稳定性。
3. 人机界面:设计友好的人机界面,方便操作人员对机械手进行控制和监控。
五、控制系统设计控制系统是机械手运动控制系统的核心,主要包括PLC控制器的程序设计、传感器和执行器的接口设计等。
1. PLC程序设计:根据机械手的运动需求,编写相应的PLC 程序,实现机械手的精确控制和协调运动。
2. 传感器接口设计:设计合适的传感器接口电路,实现传感器与PLC控制器之间的数据传输和通信。
基于S7—200PLC的机械手运动控制
基于S7—200PLC的机械手运动控制0 引言工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,并已成为现代制造生产系统中的一个重要组成部分,越来越多地被研究和应用。
本设汁的控制系统采用小型可编程控制器S7—200PLC,具有编程简单、修改容易、可靠性高等优点。
1 机械手的选择根据古典力学的观点,物体在三维空间内的静止位置是由三个坐标或围绕三轴旋转的角度来决定的。
因此,物体的位置和方向(即关节的角度)能从理论上求得。
在实际生产生活中,机械手的自由度不是盲目模仿人手的动作来确定的,而是根据实际需要的动作,设计出最少自由度的机械手来满足作业要求。
所以一般专用机械手(不包括握紧动作)通常只具有2~3 个自由度。
而通用机械手则一般取4~5 个自由度。
本设计采用的机械手共有5 个自由度。
这五个自由度为机械手能够做出手臂伸缩、手臂上下摆动、手臂左右摆动、手腕回转、手指抓紧,该机械手示意图如图1 所示。
图1 机械手示意图2 动力装置的选择工业机械手要求精度非常高,所以本设计采用的是步进电机,步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数宋控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
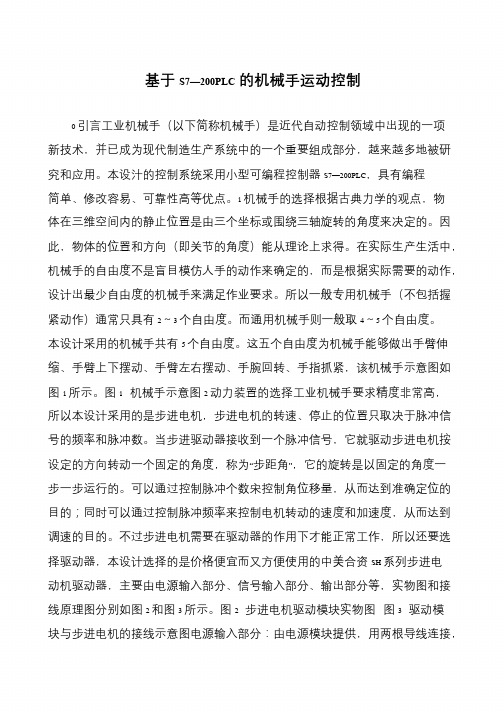
不过步进电机需要在驱动器的作用下才能正常工作,所以还要选择驱动器,本设计选择的是价格便宜而又方便使用的中美合资SH 系列步进电动机驱动器,主要由电源输入部分、信号输入部分、输出部分等,实物图和接线原理图分别如图2 和图3 所示。
图2 步进电机驱动模块实物图图3 驱动模块与步进电机的接线示意图电源输入部分:由电源模块提供,用两根导线连接,注意极性。
信号输入部分:信号源由PTO 主机提供。
由于PTO 提供的电平为24V,输入部分的电平为5V,中间加了保护电路。
基于西门子s7-200plc对机械手搬物控制的电气设计

Xxoo 学院毕业设计(论文)题目基于西门子s7-200plc对机械手搬物控制的电气设计专业名称机电设备维修与管理学生姓名指导教师毕业时间2014年7月摘要机械手能在许多劳动过程中模仿人的各种动作.机械手可以完成许多工作,如搬物、装配、切割、喷染等等,应用非常广泛。
本次PLC实验设计是通过机械手实物教学模型来模拟使用S7-200来实现对机械手的控制。
本次实验设计涵盖了PLC技术、位置控制技术、气动技术,机械手实物教学模型的机械结构采用滚珠丝杆、滑杆、汽缸、气夹等机械部件组成。
在电气方面有步进电机、步进电机驱动器、传感器、限位开关、开关电源、电磁阀等电子器件组成同时采用西门子S7-200可编程控制器。
编程方面采用顺序控制来编程,先画出流程图,然后一步一步编程,子程序需要个PLC控制步进电机程序。
最后加一个手动控制机械手的程序,并做出面控制面板来。
通信并把程序下载到PLC 上,实现用控制面板手动控制机械手。
关键字:可编程控制器PLC,机械手,步进电机驱动器、步进电机,传感器目录第一章引言 (4)第二章 plc及其应用 (6)2.1 PLC的概念 (6)2.2 PLC的组成 (6)2.3 PLC工作原理及其特点 (8)2.4 PLC的应用 (8)第三章系统总体方案设计 (9)3.1气动机械手的控制要求 (9)3.2气动机械手的气压传动系统 (10)3.3系统的控制面板操作与工作方式 (10)3.4 本章小结 (11)第四章 PLC控制系统设计 (12)4.1可编程控制器的CPU选择 (12)4.2气动机械手的I/O地址分配表 (12)4.3 PLC外部接线图 (13)4.4 气动机械手控制流程图 (14)4.5 程序设计梯形图 (15)4.6 本章小结 (15)第五章系统调试 (16)5.1 使用设备 (16)5.2 调试过程 (16)第六章设计总结 (17)致谢词 (19)参考文献 (20)附录 (21)梯形图 (21)第一章引言在现代工业中,生产过程的机械化,自动化已成为突出的主题。
基于S7-200的搬运机械手的控制系统设计

I'仝1压霜 争 艇 卜丹术并唪暑 1— 5 气千黛曩 空’r矗薯曩 卜一压精8- ̄Jtll 9 露气缸 1 r下降气缸 11_蕾#气缸 l} 卑气缸 l}簟一节蠢一 14--盘五甚电_嘲
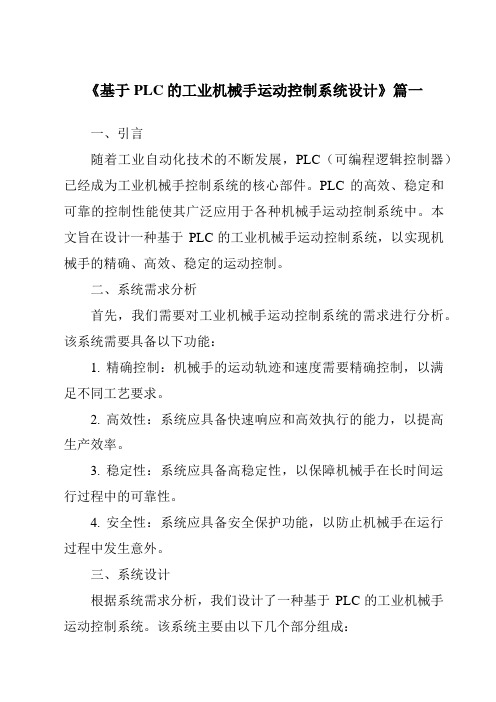
图 2机 械 手 气 动 原 理 图
三 、系统 硬 件设 计
图 4操 作 面 板 布 置 图 接 通 I1.1是 单操 作 方 式 ,按 照 手动 开关 选 择 的位 置 , 用 启 动 /停止 按钮 选 择手 动操 作 。如在方 式 下选 择上 升 /下
2、气 动 部 分 设 计 机械 手 的气 动 原理 ,如 图 2机 械 手气 动 原理 图。
办公 自动化杂 志 44’
旋 /逆 旋 、伸 /缩 、上 /下八 个 动 作 ;工作 方 式 又分 为 手 动 和 自动 其 中 自动 工 作 方式 有 包 括 :步 进 操 作 、单周 期操 作 、连 续 操作 方 式 。
movement of the manipulator comprises telescopic movement,movement,rotation an d workpiece clam ping and relax eight action process.In order to meet the requirements of production,mechanical han d divided into single operation, step-by-step operation,single cycle operation and continuous operation of four.In t he actua l production process using the operation completed two workbench between workpiece ha n dling,with s ̄ong sta b ility,high precision,miniaturiza- tion of the advan tages. Keywords S7—200 CPU226 Pneumatic manipulator Pneumatic
机械手程序的设计(西门子s7-200)
例如:
2)步的分类 ①初始步:初始状态所对应的步,即系统等待命令的相对静止状态。用双线的方框表示。每个顺序功能图至少要一个初始步。一般初始步由SM0.1触点驱动。
S0.0
SM0.1
转换条件的确定
【项目任务】机械手梯形图程序的设计。
分析工艺过程,确定输入输出,列出I/O分配表。
输入地址分配
启动按钮(SB1) I0.0
停止按钮(SB2) I0.1
上限位开关 (SQ1) I0.2
下限位开关 (SQ2) I0.3
左限位开关 (SQ3) I0.4
右限位开关 (SQ4) I0.5
R Q0.4
I0.3
M0.7
Q0.0
T38
M1.0
Q0.3
I0.2
I0.5
2、绘制顺序功能图
SM0.1
T37
T38
【练习】液体自动混合箱 步
动作1
动作2
动作3
动作4
动作5
动作
③转换条件
4-5
3-4
1-2
02
04
05
2-3
0-1
5-1
03
M0.0
M2.1
SM0.1
Q0.0
M2.2
Q0.1
M2.3
M2.2
Q0.1
M2.3
Q0.2
M2.4
M2.5
Q0.3
I0.0
I0.2
SB1
I0.0
L1
I0.1
L2
I0.2
L3
I0.3
T
I0.4
《2024年基于PLC的工业机械手运动控制系统设计》范文

《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,机械手运动控制系统在工业生产中扮演着越来越重要的角色。
传统的机械手控制系统通常采用复杂的电气控制方式,其控制精度和稳定性往往难以满足现代工业生产的需求。
而基于PLC(可编程逻辑控制器)的工业机械手运动控制系统,则以其高可靠性、高精度、易编程等优点,成为现代工业自动化控制的首选方案。
本文将详细介绍基于PLC 的工业机械手运动控制系统的设计思路、实现方法和应用效果。
二、系统设计1. 需求分析在系统设计阶段,首先需要对机械手的工作环境、工作要求、动作流程等进行详细的分析和了解。
根据需求分析结果,确定系统的控制要求、输入输出信号、传感器类型等关键参数。
同时,还需要考虑系统的可靠性、稳定性和可维护性等因素。
2. 硬件设计硬件设计是机械手运动控制系统的基础。
根据需求分析结果,选择合适的PLC、伺服驱动器、传感器等硬件设备,并设计合理的电气接线方式。
在硬件设计中,需要特别注意设备的选型和配置,确保其能够满足机械手的控制要求。
3. 软件设计软件设计是实现机械手运动控制系统的关键。
根据硬件配置和系统要求,编写相应的PLC程序、上位机监控程序等。
在软件设计中,需要采用模块化、结构化的设计思想,确保程序的可靠性和可维护性。
同时,还需要考虑程序的实时性、稳定性和易用性等因素。
三、实现方法1. PLC程序设计PLC程序是机械手运动控制系统的核心。
根据机械手的动作流程和控制要求,编写相应的PLC程序。
在程序中,需要设置合适的输入输出信号、传感器信号等,并采用适当的控制算法,确保机械手的运动精度和稳定性。
2. 伺服驱动器配置伺服驱动器是机械手运动控制系统的执行机构。
根据需求分析结果,选择合适的伺服驱动器,并配置相应的参数。
在配置过程中,需要考虑伺服驱动器的控制方式、电机类型等因素,确保其能够满足机械手的控制要求。
3. 上位机监控程序设计上位机监控程序是实现人机交互的关键。
电气工程及其自动化】基于plc的四自由度机械手控制系统设计

本科生毕业论文(设计)基于PLC的四自由度机械手控制系统设计二级学院:信息科学与技术学院专业:电气工程及其自动化完成日期:2014年5月10日目录1 绪论 (1)1.1 设计背景 (1)1.2 设计的目的和意义 (2)1.2.1 可以提高生产过程的自动化程度 (3)1.2.2 可以改善劳动条件、避免人身事故 (3)1.3 研究现状及发展趋势 (3)1.3.1 机械手的研究现状及发展趋势 (3)1.3.2 PLC控制系统的研究现状及发展趋势 (4)1.4 课题主要研究内容 (5)2 基于PLC控制机械手方案的确定 (5)2.1 整体设计 (5)2.2 功能作用 (5)2.3 各模块功能的简单介绍 (6)3 系统硬件介绍 (6)3.1控制系统接线图 (6)3.2机械手设计内容 (7)3.2.1 机械手结构示意图 (7)3.2.2 机械手工作流程 (7)3.2.3 控制要求 (8)3.3 步进电机及其驱动 (8)3.3.1 步进电机特点 (8)3.3.2 四相步进电机的工作方式 (8)3.3.3 步进电机原理图 (8)3.4 PLC控制器选型 (9)3.5 电气接线简图 (9)4 系统软件设计 (11)4.1 整体设计 (11)4.1.1 总流程设计 (11)4.1.2 手动功能设计 (12)4.1.3 单步功能设计 (13)4.1.4 循环功能设计 (14)4.2程序设计 (15)4.2.1 公用程序 (16)4.2.2 自动操作程序 (17)5 人机界面设计 (19)5.1 组态MCGS软件的介绍 (19)5.1.1 MCGS的优点 (19)5.1.2 MCGS组态软件的整体结构 (19)5.2 组态MCGS与plc通信 (19)5.3系统的MCGS 组态环境 (20)6. 调试 (20)7. 结论与展望 (22)参考文献: (22)附录 (24)附录A 、梯形图 (24)附录B、指令表 (32)致谢 (36)基于PLC的四自由度机械手控制系统设计摘要:本文介绍一种基于PLC 的四自由度机械手控制系统设计方案。
《2024年基于PLC的工业机械手运动控制系统设计》范文
《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,PLC(可编程逻辑控制器)已经成为工业机械手控制系统的核心部件。
PLC的高效、稳定和可靠的控制性能使其广泛应用于各种机械手运动控制系统中。
本文旨在设计一种基于PLC的工业机械手运动控制系统,以实现机械手的精确、高效、稳定的运动控制。
二、系统需求分析首先,我们需要对工业机械手运动控制系统的需求进行分析。
该系统需要具备以下功能:1. 精确控制:机械手的运动轨迹和速度需要精确控制,以满足不同工艺要求。
2. 高效性:系统应具备快速响应和高效执行的能力,以提高生产效率。
3. 稳定性:系统应具备高稳定性,以保障机械手在长时间运行过程中的可靠性。
4. 安全性:系统应具备安全保护功能,以防止机械手在运行过程中发生意外。
三、系统设计根据系统需求分析,我们设计了一种基于PLC的工业机械手运动控制系统。
该系统主要由以下几个部分组成:1. PLC控制器:作为整个系统的核心,负责接收上位机的指令,并控制机械手的运动。
2. 传感器:用于检测机械手的当前位置、速度和状态等信息,为PLC控制器提供反馈信号。
3. 执行器:包括电机、减速器、传动装置等,负责驱动机械手进行运动。
4. 上位机:用于输入控制指令和监控机械手的运行状态。
具体设计步骤如下:1. 根据机械手的运动要求,确定PLC控制器的输入/输出点数和类型。
2. 设计PLC程序,实现机械手的精确控制、高效性和稳定性。
程序应包括主程序、中断程序和安全保护程序等。
3. 选择合适的传感器和执行器,与PLC控制器进行连接,实现信息的采集和执行动作的控制。
4. 设计上位机界面,实现控制指令的输入和机械手运行状态的监控。
四、系统实现在系统实现过程中,需要注意以下几点:1. 程序设计:PLC程序的编写应遵循模块化、结构化、可读性强的原则,以便于后续的维护和升级。
2. 硬件选型与配置:传感器和执行器的选型应考虑到其性能、精度、可靠性等因素,以满足机械手的运动控制要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘
要: 设 计 了基 于 P L C的 四 自由度机 械 手控 制 系统 , 用P L C 实现 了外 来信 号 触发 的 对 电磁 阀的顺 序
l 3 l 4
的 ±9 0 。 旋转 , 1只 S U型 气缸 实 现垂 直运 动 , 1只 MA L 型气 缸 实 现 手 爪 的伸 缩 运 动 , 1只 MS Q B型 气 缸 实 现
手 爪 的 ±1 8 0 。 旋源自 以及 1只气动 手爪 。该 机 械 手可 广
量 旋 转 气 ! 缸 手 爪开 一… 合 气 一 缸
收稿 日期 : 2 0 1 3 - 0 2 - 2 7 图 1 四 自 由度 机 械 手
基金项 目: 国家 自然基金资助项 目( 5 1 0 7 5 2 4 5 )
本 研究 控制 的机 械手 主要 用 于小 空 间内 的零件搬 运, 由于 2个 旋转 气 缸可 通过 机械设 置 其两 个止 点 , 故
引 言
手臂水平 伸缩气缸 手臂竖直 升降气缸 手臂左右 旋转气缸
四 自由度机 械 手在 生 产 中得 到 了广 泛 的应 用 … 。
P L C是一 种方 便 开发 与联 网且 抗干 扰 能力强 的可编 程
逻 辑控 制 器件 , 在 自动 化 生 产 线 中也得 到 了广 泛 的应 用 , 针 对一 款 四 自由度 机 械 手 , 应用 s 7 . 2 0 0型 P L C 设 计 了其控 制 系统 。 1 机械 手 的机 械 结构及 气 路设计 图 1为 四 自由度 机械 手 的 照 片 , 该 机 械 手 的组 成 为: 1只 Q G K型齿 轮齿 条式 摆 动 气缸 实 现 整 个 机械 手
控制 , 完成 了机械 手 手臂 水平 伸 出放 回 、 手臂 竖直升 降 、 手臂 旋 转 、 手 爪旋 转 及 手爪 开 合 等功 能 , 介 绍 了相 应
的硬 件 和软 件设 计 。
关键 词 : ¥ 7 - 2 0 0 ; 四 自由度 气动机械 手 ; 控制 系统 中图分 类号 : T P 1 3 8 . 7 文献 标 志码 : B 文章 编 号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 0 8 - 0 0 8 9 - 0 3
图 2所 示 。
图 2 机械手的气路原理图
只设 置 了垂 直 与水平 两 对 限位 传感 器 , 对机 械 手 气 缸 动作快 慢 的 控 制 主 要 由节 流 阀控 制 气 缸 的通 气 量 来
实现 J 。
2 控 制 系统 的硬 件设 计
根 据 系统 的控制要 求 , 共 需要 P L C 的输 入 点 数 为
/_ _ I O . 7 2 L+ 5 V _ =
ZM
制 系统对 P L C I / / O点数 的要 求 。P L C的输 入输 出地 址
分配 分别 如表 1 和表 2所 示 。
表 1 输 入 控 制信 号地 址 分 配
—_
—— / __ 1 0 . 6
2 4 V { F - - Z M Q O . 5 二丽
1 . 阀门 2 . 减压阀 3~1 2 . 节流阀 1 3、 1 4 . 消声器
1 5~ 2 4. 电磁 阀 2 5 汇 流板
泛 应用 在小 空 间 内的零件 搬 运 。机 械 手通 过 传感 器 给 予 外部 信号 , 应用 P L C实 现顺 序 控 制 , 其 气 动 原 理 如
作者简介 : 于复生 ( 1 9 6 9 一) , 男, 山东潍 坊人 , 教授, 博 士后 , 主要从事精密测控 系统 与机器人工程研究工作 。
液压 与 气动
1 4点 , 分 别为 : 五个 气 缸 的动 作 开 关 ( 1 O点 ) 、 两 对 限 位开 关 的信 号 输 人 点 ( 4点 ) ; 所 需 输 出点 数 为 1 0点 , 即: 五对气 缸 的 电磁 阀控 制 ( 1 0点 ) 。
— — — , , 一 I 1 . o QO ・ 6 — — — , 一 I 1 . 1
2 0 1 3年 第 8期
—— / _ _ 1 0 . 1 Qo . o — — ■/ _ _ I O . 2 Qo . 1 —— / _ - I O . 3 QO . 2 —— / _ _ I O . 4 QO . 3
— —
1 0 . 5 Q O . 4
于复 生 。段登家 。杜桂林 , 李 涛
De s i g n o f Co n t r o l Un i t f o r 4 一 DOF Ma n i p u l a t o r Ba s e d o n S 7 — 2 0 0 PL C
Y U F u — s h e n g ,D U A N D e n g - j i a , D U G u i . 1 i n , L I T a o
2 0 1 3年第 8期
DO I : 1 0 . 1 1 8 3 2 / j . i s s n . 1 0 0 0 - 4 8 5 8 . 2 0 1 3 . 0 8 . 0 2 4
液压与 气动
8 9
基于 ¥ 7 - 2 0 0 P L C 的 四 自 由度 机 械 手 控 制 系 统 设 计
选用 P L C是 S 7 . 2 0 0系 列 C P U 2 2 4 X P C N型机 , 该 P L C有 1 4个 输人 点 、 l 0个 输 出点 , 可 以满 足所 设 计 控
—_ l r 1 M /_ _ 1 0 . 0 I M 1 L+
5 V _ 二