workbench瞬态动力分析
Ansys-Workbench动力学分析
4.1: 动力学绪论
第一节 动力学分析目的及定义 为什么要对结构进行动力学分析?
土木建筑、地质工程领域
1940年11月7日倒塌—风载
1940年7月1日通车 美国塔科曼悬索大桥
交通运输、航空航天领域
机械、机电领域
什么是结构动力学?
定义:研究结构在动力荷载作用下的动力反应。
目的:动力荷载作用下结构的内力和变形;
4.2: 模态分析
第一节 模态分析的含义
什么是模态分析?
模态分析是用来确定结构的振动特性(固有频率和振型) 的一种技术。 模态分析的好处:
– 使结构设计避免共振或以特定频率进行振动(例如 扬声器);
– 使工程师可以认识到结构对于不同类型的动力载荷 是如何响应的。
建议: 在准备进行其它动力分析之前首先要进行
单地用简谐函数来表示。
FP
t
(3)冲击荷载 荷载的幅值(大小)在很短时间内急剧增大或急剧减小。
FP 冲击荷载
t
FP 突加荷载
t
(4)随机荷载 荷载的幅值变化复杂、难以用解析函数解析表示的荷载。
风荷载 地震作用
25 Wind speed (m/s) 20
15
10
5
0
0
50
100
脉动风
平均风
150
200
fn
n 2
为系统的固有频率,Hz
1 2
T
fn n
为系统的周期,s
2.二自由度无阻尼线性系统
对质量块m1、 m2受力分析, 由Newton第二定律得
mm12xx12 kk13xx12kk22(
x2 x1) (x2 x1)
mm12xx12(kk21x1
基于ANSYS Workbench的摇摆装置模态和瞬态分析
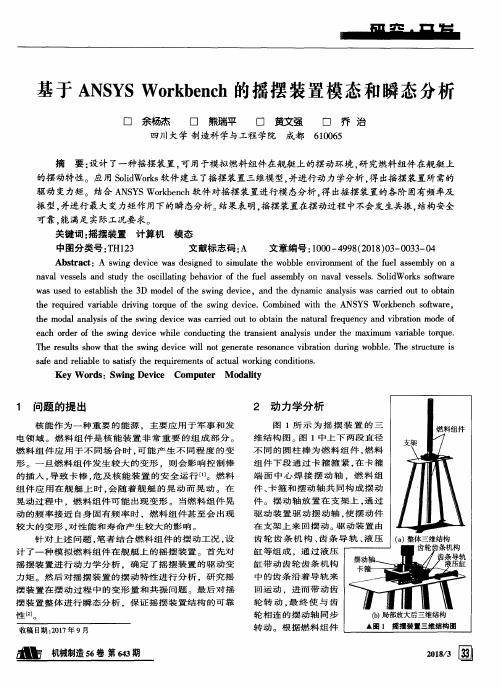
each order of the swing device while conducting the tra n sient analysis under the m ̄ imum var iable torque.
The results show that the swing device will not generate resonance vibration dur ing wobble.The structure is
o3= ̄-sin(斋 £)
(4)
对 角 位 移 函 数 求 二 阶导 数 ,可 得 角 加 速 度 函 数 :
所 示 。 已 知 摇 摆 装 置 存 在 三 种 比较 危 险 的 工 况 ,这 三 种
一 号 (})sin"iT— )
(5)
工 况 下 的 摆 动 角 度 和 时 间 满 足 正 弦 关 系 。摇 摆 件 的 摆 角 为 3。、7.5。、22.5。,对 应 的摆 动 周 期 t依 次 为 12 S、
Ot2-.-吾 (号 )sin(号 )
(6)
24 S-,40 s『31。
根 据 摆 动 件 的 三 维 模 型 ,借 助 计 算 机 软 件 求 得 摆 动 轴 到 质 心 的 距 离 为 0.822 in。 由 于 摇 摆 装 置 的 运 动 为 简 谐 运 动 ,因 此 其 摆 长 L=0.822 In,摆 动 周 期 为 :
naval vessels and study the oscillating behavior of the fuel assembly on naval vessels.SolidW orks software
was used to establish the 3D model of the swing device,and the dynamic analysis was carried out to obtain
workbench动力学分析实例PPT学习教案

– Minimum CFL Time Step = 1.0e-7 sec
7.b Set the Solve Units = mm, mg, ms Note:
The mm, mg, ms unit system is the most accurate in most simulations, so it is the only one currently available. Although more solver unit systems will be available in the future, any unit system in the drop-down list may be used to enter data and/or display the results.
3.c Enter material model name: “My_Aluminum”
SC
library.
3.b Select the last slot under Engineering Data to define a new material model.
第4页/共37页
Step 3 – Define
Step 2 – Specify the
Project U2n.aitSselect MKS for
the Project Units from the Units List provided
2.b RequestNtEohtneg:ainteering
Native
Applications Data is native in Workbench,
Engineering Data
Material ... 3.d Make sure the new material is active in order to define its properties SC
ansys_workbench瞬态动力分析(4)分析
积分时间步长
Training Manual
• AUTOTS对于全瞬态分析缺省是打开的. 对于缩 减法和模态叠加法,是不可用的. • AUTOTS 会减小ITS (直到 Dtmin) 在下列情况:
– – – – – – 在响应频率处,小于20个点 求解发散 求解需要大量的平衡迭代(收敛很慢) 塑性应变在一个时间步内累积超过15% 蠕变率超过0.1 如果接触状态要发生变化 ( 决大多数接触单元可由 KEYOPT(7) 控制)
缩减/完整结构矩阵
Training Manual
• 求解时既可用缩减结构矩阵,也可用完整结构矩阵; • 缩减矩阵:
– 用于快速求解; – 不允许非线性因素存在 – 根据主自由度写出[K]、[C]和[M]等矩阵,主自由度是完全自由度 的子集; – 缩减的 [K] 是精确的,但缩减的 [C] 和 [M] 是近似的。
Training Manual
DYNAMICS 11.0
• 求解方法
– 完整矩阵方法为缺省方法。允许下列非 线性选项:
• 大变形 • 应力硬化 • Newton-Raphson 解法
• 集中质量矩阵
– 主要用于细长梁和薄壁壳或波的传播
• 方程求解器
– 由程序自行选择
分析选项
• 求解选项 • 选择大位移瞬态分析 或小变形瞬态分析 .
DYNAMICS 11.0
• 完整矩阵:
– 不进行自由度缩减,采用完整的[K]、[C]和[M]矩阵; – 下面的讨论都是基于此种方法。
积分时间步长
Training Manual
• 积分时间步长(亦称为ITS 或 Dt )是时间积 分法中的一个重要概念
– ITS = 两个时刻点间的时间增量 Dt ; – 积分时间步长决定求解的精确度,因而其数值应仔 细选取。 – 对于缩减矩阵法与模态叠加法瞬态分析ANSYS 只 允许ITS常值. – 完全法瞬态分析, ANSYS 可以自动调整时间步大 小在用户指定的范围内
(完整版)ansys动力学瞬态分析详解
非零速度是通过对结构中需指定速度的部分加上小时间间隔上的小位移来实现的。比如如果 =0.25,可以通过在时间间隔0.004内加上0.001的位移来实现,命令流如下:
...
TIMINT,OFF! Time integration effects off
注─如果并不想包括任何非线性,应当考虑使用另外两种方法中的一种。这是因为完全法是三种方法中开销最大的一种。
完全法的优点是:
·容易使用,不必关心选择主自由度或振型。
·允许各种类型的非线性特性。
·采用完整矩阵,不涉及质量矩阵近似。
·在一次分析就能得到所有的位移和应力。
·允许施加所有类型的载荷:节点力、外加的(非零)位移(不建议采用)和单元载荷(压力和温度),还允许通过TABLE数组参数指定表边界条件。
·唯一允许的非线性是简单的点—点接触(间隙条件)。
§3.4 完全法瞬态动力学分析
首先,讲述完全法瞬态动力学分析过程,然后分别介绍模态叠加法和缩减法与完全法不相同的计算步骤。完全法瞬态动力分析(在ANSYS/Multiphsics、ANSYS/Mechauioal及ANSYS/Structural中可用)由以下步骤组成:
D,ALL,UY,.001! Small UY displ. (assuming Y-direction velocity)
TIME,.004! Initial velocity = 0.001/0.004 = 0.25
LSWRITE! Write load data to load step file (Jobname.S01)
对于完全法瞬态动力学分析,注意下面两点:
ansysworkbench瞬态动力学实例
在本文中,我将为您撰写一篇关于ANSYS Workbench瞬态动力学实例的文章。
我们将深入探讨ANSYS Workbench在瞬态动力学仿真方面的应用,从简单到复杂、由浅入深地讨论其原理和实践操作,并共享个人观点和理解。
第一部分:介绍ANSYS Workbench瞬态动力学仿真ANSYS Workbench是一种用于工程仿真的全面评台,包含了结构、流体、热传递、多物理场等多种仿真工具。
瞬态动力学仿真是ANSYS Workbench的重要应用之一,它能够模拟在时间和空间上随机变化的动力学过程,并对结构在外部力作用下的动力响应进行分析。
在瞬态动力学仿真中,ANSYS Workbench可以模拟诸如碰撞、冲击、振动等动态载荷下的结构响应,用于评估零部件的耐久性、振动特性、动态稳定性等重要工程问题。
通过对这些现象的模拟和分析,工程师可以更好地了解结构在实际工况下的性能,进而进行有效的设计优化和改进。
第二部分:实例分析为了更直观地展示ANSYS Workbench瞬态动力学仿真的应用,我们以汽车碰撞仿真为例进行分析。
假设我们需要评估汽车前部结构在碰撞事故中的动态响应,我们可以通过ANSYS Workbench建立汽车前部结构的有限元模型,并对其进行碰撞载荷下的瞬态动力学仿真。
我们需要构建汽车前部结构的有限元模型,包括车身、前保险杠、引擎盖等部件,并设定材料属性、连接方式等。
接下来,我们可以在仿真中引入具体的碰撞载荷,如40km/h车速下的正面碰撞载荷,并进行瞬态动力学仿真分析。
通过仿真结果,我们可以获取汽车前部结构在碰撞中的应力、应变分布,以及变形情况,从而评估其在碰撞事故中的性能表现。
第三部分:个人观点与总结通过以上实例分析,我们可以看到ANSYS Workbench瞬态动力学仿真在工程实践中的重要应用价值。
瞬态动力学仿真不仅能够帮助工程师分析结构在动态载荷下的响应,还可以为设计优化、安全评估等工程问题提供重要参考。
workbench瞬态动力分析

瞬态动力分析总论
• 定义:
– 确定结构在任意随时间变化载荷作用下系统瞬 态响应特性的技术。
• 输入数据:
– 最一般形式是载荷为时间的任意函数;
• 输出数据:
– 随时间变化的位移和其它的导出量,如:应力 和应变。
运动方程
• 基本运动方程
M u C u K u F t
– 用来设置初始条件
• 阶跃或渐进载荷
• 指定阻尼 • 使用缺省积分参数值
分析选项
• 阻尼
– α和b阻尼均可用; – 在大多数情况下,忽略α阻尼(粘性阻尼),仅指定b 阻尼(由滞后造成的阻尼):
b = 2/w
式中 为阻尼比,w 为主要响应频率 (rad/sec)。
典型命令: ALPHAD,… BETAD,…
分析过程
• 讨论完全法瞬态分析过程. • 五个主要步骤:
– – – – – 建立模型 选择分析类型和选项 指定边界条件和初始条件 施加载荷历程并求解 查看结果
模型: 所有的非线性因素可允许注意要求密度!
分析选项
– – – – 进入求解阶段,并选择瞬态分析. 选择完全法 求解选项 阻尼
• 求解方法
分析选项
• 输出控制
–用来控制写到结果文件的内容. –使用命令 OUTRES 或选择 Solution > Sol’n Control.. > Basic –通常的选项用来将每个子步的结果写到结果文件中去.
• 可光滑绘制结果与时间的关系曲线. • 可能造成结果文件庞大.
分析选项
• 瞬态效应 on/off
零初始位移和零初始速度
• 是缺省的初始条件,即如果u0 = v0 = 0 ,则不需 要指定任何条件。 • 在第一个载荷步中可以加上对应于载荷 — 时间 关系曲线的第一个拐角处的载荷。 • 非零初始位移及 / 或非零初始速度 ─ 可以用 IC 命 令设置这些初始条件。 • 命令:IC
workbench瞬态动力分析

Dx IT20 L 波长方向的长度 c 弹性波速 E 杨氏模量 E
质量密度
非线性响应
• 非线性响应
–全瞬态分析可包括任何非线性类型. – 更小的 ITS 通常有助于平衡迭代收敛. – 塑性、蠕变及摩擦等非线性本质上是非保守的,需 要精确地遵循载荷加载历程.小的 ITS 通常有助于精 确跟踪载荷历程. – 小的ITS可跟踪接触状态的变化.
– 模态叠加法 – 直接积分法
• 运动方程可以直接对时间按步积分。在每个时间点(time = 0, Dt , 2Dt, 3Dt,….) ,需求解一组联立的静态平衡方程 (F=ma);
– 需假定位移、速度和加速度是如何随时间而变化的, (积分方案选择) – 有多种不同的积分方案,如中心差分法,平均加速度 法, Houbolt, WilsonQ, Newmark 等.
积分时间步长
• 如何选择 ITS? • 推荐打开自动时间步长选项 (AUTOTS), 并设置 初始时间步长Dtinitial和最小时间步长Dtmin 、最 大时间步长Dtmax. ANSYS 会利用自动时间步长 功能来自动决定最佳时间步长Dt. • 例如: 如果AUTOTS 是打开的, 并且Dtinitial= 1 sec, Dtmin= 0.01 sec, and Dtmax= 10 sec; 那 ANSYS 起始采用 ITS= 1 sec ,并依据结构的响 应允许其在0.01 和 10 之间变动.
缩减/完整结构矩阵
• 求解时既可用缩减结构矩阵,也可用完整结构矩阵; • 缩减矩阵:
– 用于快速求解; – 不允许非线性因素存在 – 根据主自由度写出[K]、[C]和[M]等矩阵,主自由度是完全自由度 的子集; – 缩减的 [K] 是精确的,但缩减的 [C] 和 [M] 是近似的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
零初始位移和非零初始速度
Training Manual
非零速度是通过对结构中需指定速度的部分加上 小时间间隔上的小位移来实现的。比如如果 v0=0.25,可以通过在时间间隔0.004内加上0.001的 位移来实现,命令流如下:
DYNAMICS 11.0
积分时间步长
• ITS 小到足够获取下列动力学现象:
– – – – 响应频率 载荷突变 接触频率 波传播效应
Training Manual
DYNAMICS 11.0
响应频率
• 响应频率
– 不同类型载荷激发系统不同的响 应频率; – ITS小到足够获取所关心的最高 响应频率(最低响应周期); – 每个循环中有20个时刻点应是足 够的,即:
积分时间步长
Training Manual
DYNAMICS 11.0
• 如何选择 ITS? • 推荐打开自动时间步长选项 (AUTOTS), 并设置 初始时间步长Dtinitial和最小时间步长Dtmin 、最 大时间步长Dtmax. ANSYS 会利用自动时间步长 功能来自动决定最佳时间步长Dt. • 例如: 如果AUTOTS 是打开的, 并且Dtinitial= 1 sec, Dtmin= 0.01 sec, and Dtmax= 10 sec; 那 ANSYS 起始采用 ITS= 1 sec ,并依据结构的响 应允许其在0.01 和 10 之间变动.
DYNAMICS 11.0
分析过程
• 讨论完全法瞬态分析过程. • 五个主要步骤:
– – – – – 建立模型 选择分析类型和选项 指定边界条件和初始条件 施加载荷历程并求解 查看结果
Training Manual
DYNAMICS 11.0
模型: 所有的非线性因素可允许注意要求密度!
分析选项
– – – – 进入求解阶段,并选择瞬态分析. 选择完全法 求解选项 阻尼
积分时间步长
Training Manual
• 积分时间步长(亦称为ITS 或 Dt )是时间积 分法中的一个重要概念
– ITS = 两个时刻点间的时间增量 Dt ; – 积分时间步长决定求解的精确度,因而其数值应仔 细选取。 – 对于缩减矩阵法与模态叠加法瞬态分析ANSYS 只 允许ITS常值. – 完全法瞬态分析, ANSYS 可以自动调整时间步大 小在用户指定的范围内
HHT法可以通过简单指定GAMMA值或指定ALPHAF与 ALPHAM可以得到其他的方法 Hilber, Hughes and Taylor (HHT) Wood, Bossack and Zienkiewicz Chung and Hulbert
缩减/完整结构矩阵
Training Manual
• 求解时既可用缩减结构矩阵,也可用完整结构矩阵; • 缩减矩阵:
积分时间步长
Training Manual
• AUTOTS对于全瞬态分析缺省是打开的. 对于缩 减法和模态叠加法,是不可用的. • AUTOTS 会减小ITS (直到 Dtmin) 在下列情况:
– – – – – – 在响应频率处,小于20个点 求解发散 求解需要大量的平衡迭代(收敛很慢) 塑性应变在一个时间步内累积超过15% 蠕变率超过0.1 如果接触状态要发生变化 ( 决大多数接触单元可由 KEYOPT(7) 控制)
HHT 方法 –求解中间时间点的运动 方程然后外推到 t n+1. (Note: 缺省HHT方法 am = 0 )
求解方法
Training Manual
• 时间积分方案 - 时间积分参数, γ, a, d, af, am, 通过 求解控制选项输入
– TRNOPT, FULL ,,, ,, NMK|HHT ! 缺省 Newmark – [TINTP,GAMMA,ALPHA,DELTA,THETA ,,, ,,, ALPHAF,ALPHAM]
DYNAMICS 11.0
– 需假定位移、速度和加速度是如何随时间而变化的, (积分方案选择) – 有多种不同的积分方案,如中心差分法,平均加速度 法, Houbolt, WilsonQ, Newmark 等.
求解方法
Training Manual
DYNAMICS 11.0
• 时间积分方案 – 两种积分方案 Newmark 和 HHT. 缺省为 Newmark
– 当不确定时,就选择 大变形瞬态分析
指定载荷步结束时间
自动时间步长 (discussed next)
Training Manual
DYNAMICS 11.0
指定初始、最大、最小时间步长 Dt.
输出控制 controls (discussed next)
分析选项
• 自动时间步长
– – – –
Training Manual
• 初始条件
– 时间t = 0时的条件:u0 ,v0,a0 – 它们的缺省值为, u0 = v0 = a0 = 0 – 可能要求非零初始条件的实例:
• 飞机着陆 (v00) • 高尔夫球棒击球 (v00) • 物体跌落试验 (a00)
Training Manual
DYNAMICS 11.0
施加初始条件的两种方法
在瞬态分析过程中,可自动计算正确的时间步长. 推荐激活该选项同时指定最大与最小积分步长. 如果有非线性因素,选择 ―Program Chosen‖选项 注意: 在ANSYS 中,总体求解器控制开关 [SOLCONTROL]的缺省状态为开, 建议保留这一状态, 更为重要的是,不要在载荷步之间打开或关闭此开关
分析选项
• 瞬态效应 on/off
– 用来设置初始条件
Training Manual
DYNAMICS 11.0
• 阶跃或渐进载荷
• 指定阻尼 • 使用缺省积分参数值
分析选项
• 阻尼
Training Manual
DYNAMICS 11.0
– α和b阻尼均可用; – 在大多数情况下,忽略α阻尼(粘性阻尼),仅指定b 阻尼(由滞后造成的阻尼):
b = 2/w
式中 为阻尼比,w 为主要响应频率 (rad/sec)。
典型命令: ALPHAD,… BETAD,…
分析选项
• 求解器选择
– 缺省ANSYS选择稀疏求解器 – 对于大自由度问题 (>100000 dofs) 使用PCG法
Training Manual
DYNAMICS 11.0
初始条件
– 用于快速求解; – 不允许非线性因素存在 – 根据主自由度写出[K]、[C]和[M]等矩阵,主自由度是完全自由度 的子集; – 缩减的 [K] 是精确的,但缩减的 [C] 和 [M] 是近似的。
DYNAMICS 11.0
• 完整矩阵:
– 不进行自由度缩减,采用完整的[K]、[C]和[M]矩阵; – 下面的讨论都是基于此种方法。
Training Manual
DYNAMICS 11.0
Dt = 1/20f
式中 ,f 是所关心的最高响应频率。
响应周期
载荷突变
• 载荷突变
– ITS 小到足够获取载荷 突变现象
Load
Training Manual
DYNAMICS 11.0
t
Load
t
接触频率
• 接触频率
– 当两个物体发生接触,间隙或接触 表面通常用刚度(间隙刚度)来描 述; – ITS小到足够获取间隙“弹簧”频 率; – 建议每个循环三十个点,才足以获 取两物体间的动量传递。更小的 ITS 会造成能量损失,并且冲击可 能不是完全弹性的。
运动方程
• 基本运动方程
M u Cu K u F t
Training Manual
DYNAMICS 11.0
• 这是动力学最通常的方程形式,载荷 可以是任意随时间变化的. • 按照求解方法, ANSYS 允许在瞬态动 力分析中包括各种类型的非线性 —— 大变形、接触、塑性等等.
• 不同的a 和d 造成积分方案的变化 (隐式 / 显式 / 平均加速度 ). • Newmark 是隐式积分方案. • ANSYS/LS-DYNA 利用显式积分方案.
求解方法
• 时间积分方案 HHT 方法 :
Training Manual
DYNAMICS 11.0
Newmark 方法是求解 t n+1时刻的运动 方程
• 以静载荷步开始
Training Manual
– 当只需在模型的一部分上施加初始条件时,例如,用 强加的位移将悬臂梁的自由端从平衡位置“拨”开时, 这种方法是有用的; – 用于需要施加非零初始加速度时。
DYNAMICS 11.0
• 使用IC 命令
– Solution > Apply > Initial Condit’n > Define + – 当需在整个物体上施加非零初始位移或速度时IC 命令 法是有用的。
Training Manual
DYNAMICS 11.0
• 求解方法
– 完整矩阵方法为缺省方法。允许下列非 线性选项:
• 大变形 • 应力硬化 • Newton-Raphson 解法
• 集中质量矩阵
– 主要用于细长梁和薄壁壳或波的传播
• 方程求解器
– 由程序自行选择
分析选项
• 求解选项 • 选择大位移瞬态分析 或小变形瞬态分析 .
Training Manual
DYNAMICS 11.0
1 ITS 30 f c fc 1 2 k m
f c 接触频率 k 间隙刚度 m 有效质量
波传播