24GHz车载雷达射频前端设计
车载防撞雷达研究与设计
车载防撞雷达研究与设计作者:李海涛田宇航任震赵静来源:《电子技术与软件工程》2018年第19期摘要车载防撞雷达作为汽车主动安全的核心,可有效降低事故发生概率。
本文设计并实现了一个车载防撞雷达系统,并提出一种新的目标探测算法,通过测试实验,该系统达到了预期设计指标。
【关键词】防撞雷达多目标配对 DSP LFMCW雷达车载防撞雷达是主动式安全技术的核心部件,其可以对目标实现自主检测,同时判断是否报警等功能。
本文围绕车载防撞雷达系统展开了研究,分析其基本工作原理,搭建车载防撞雷达硬件平台,研究雷达系统的目标探测算法,实现汽车防撞雷达的测速和测距功能。
1 车载防撞雷达的基本原理车载防撞雷达目的是获取目标的距离速度信息,根据策略采取有效措施并主动报警。
1.1 车载防撞雷达测距测速原理线性调频连续波(LFMCW)雷达调制方式简单,具有优良测距能力并且功率小,是车载防撞雷达最常用的一种方式,因此采用LFMCW作为本文车载防撞雷达系统的工作体制。
LFMCW体制雷达的工作原理是将信号的频率按照一定的线性斜率进行调制并发射,利用回波的时延来解算目标的信息。
当目标运动时,目标会和雷达产生相对速度(具有多普勒频移),但存在距离速度耦合,LFMCW通过采用不同斜率的调制波来去除耦合效应,从而完成对距离和速度的解算。
1.2 车载防撞雷达的总体设计要求道路环境的复杂决定了雷达系统应能够快速并且能够精准的探测本车周围目标。
根据使用要求,对车载防撞雷达系统提出以下总体指标要求:中心载频(f):24.125GHz波长(λ):12.4mm扫频带宽(B):250MHz距离分辨率(△R):<1m速度分辨率(△v):<1m/s水平波束宽度:≥15°测距范围:1m-50m最大可测速度:30m/s更新时间:≤40ms2 车载防撞雷达硬件系统的设计2.1 雷达系统的整体结构方案车载防撞雷达系统的整体结构方案见图1所示,系统以常见的LFMCW雷达系统为基础,主要是由收发天线、射频前端、中频信号调理模块、信号处理模块、调制波发生器组成。
24GHz汽车毫米波雷达实验报告
24GHz汽车毫米波雷达实验报告是德科技射频应用工程师王创业1. 前言汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用。
随着器件工艺和微波技术的发展,毫米波雷达产品越来越小。
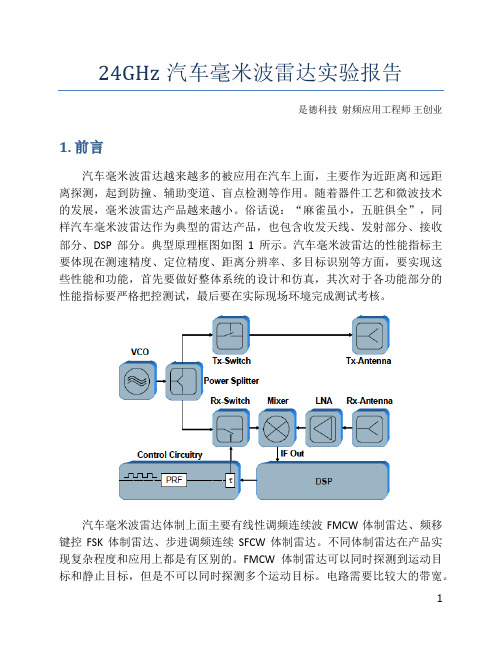
俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP部分。
典型原理框图如图1所示。
汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核。
汽车毫米波雷达体制上面主要有线性调频连续波FMCW体制雷达、频移键控FSK体制雷达、步进调频连续SFCW体制雷达。
不同体制雷达在产品实现复杂程度和应用上都是有区别的。
FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标。
电路需要比较大的带宽。
FSK体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标。
电路带宽比窄,系统响应捕获比较慢,成本比FMCW体制要低很多。
SFCW体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来。
SFCW体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高。
2.实验目的在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计。
主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上。
典型的例子,在FMCW雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与FMCW调制的线性度有关。
利用是德科技平台化解决方案,即软件+硬件+工程师,可以很容易的实现雷达系统设计仿真、处理算法验证、微波电路设计测试、天线设计测试。
【毫米波雷达】雷达频段从24GHz到77GHz,提高分辨率和精度

一、24GHz与77GHz频段比较1、 24GHz频段我们感兴趣的频段见图,24.0GHz到24.25GHz的频段是窄带(NB),带宽为250MHz,常用于工业、科学和医学方面。
其中,24GHz频带还包括一个带宽为5GHz的超宽带(UWB)。
在短程雷达中,24GHz频段的NB和UWB雷达已经应用于传统的汽车传感器上。
通常NB 雷达可以完成盲点检测等简单应用,但在大多数情况下包括超短距离的情况下,由于高频分辨率的需求,需要使用UWB雷达。
但是由于欧洲电信标准化协会(ETSI)和联邦通信委员会(FCC)制定的频谱规则和标准,UWB 频段将很快被逐步淘汰。
2022年1月1日以后,UWB频段将无法在欧洲和美国使用,只有窄带ISM频段可以长期使用。
24GHz频段缺乏宽带宽,再加上新兴雷达应用中对更高性能的需求,使得24GHz频段对新兴雷达没有吸引力,尤其是在当前对自动停车和全景视图感兴趣的汽车领域。
2.、77GHz频段反观77GHz频段,其中76-77GHz频段可用于远程车载雷达,并且该频段有等效同性各向辐射功率(EIRP)的优势,可控制前端远程雷达,例如自适应巡航控制。
该频段在日本和欧洲可用于交通基础设施中的雷达系统,可以完成车辆计数、交通阻塞、事故检测、车速测量和通过检测车辆激活交通灯等任务。
77-81GHz短程雷达(SRR)频段是新加入的频段;这个频段最近在全球监管和行业采用情况方面都获得了显著的吸引力。
同时,该频段可提供高达4 GHz的宽扫描带宽,非常适合需要高范围分辨率(HRR)的应用。
展望未来,大多数24 GHz汽车雷达传感器可能会转向77 GHz频段。
二、77GHz频段在汽车和工业领域中应用的优势接下来主要介绍77GHz频段在汽车和工业领域中应用的优势之处。
优势1:高的距离分辨率和测距精度与24GHz频段下的只有200MHz带宽的ISM频段相比,77GHz频段下的SRR频带可提供高达4GHz的扫描带宽,显著提高了距离分辨率和精度。
工业和信息化部关于发布24GHz频段短距离车载雷达设备使用频率的通知

工业和信息化部关于发布24GHz频段短距离车载雷达设备使用频率的通知文章属性•【制定机关】工业和信息化部•【公布日期】2012.11.19•【文号】工信部无[2012]548号•【施行日期】2012.11.19•【效力等级】部门规范性文件•【时效性】现行有效•【主题分类】通信业正文工业和信息化部关于发布24GHz频段短距离车载雷达设备使用频率的通知(工信部无〔2012〕548号)为提高我国车辆的道路行车安全,满足汽车电子设备对无线电频谱资源的需求,根据我国无线电频率划分规定及频谱资源使用情况,经研究,将24.25-26.65GHz频段规划用于24GHz短距离车载雷达设备的使用。
具体事宜通知如下:一、24GHz短距离车载雷达设备的射频要求:(一)使用频率: 24.25-26.65GHz;(二)发射信号带宽(-10dB带宽)至少500MHz;(三)发射信号的等效全向辐射功率谱密度限值符合要求(详见附件1);(四)窄带杂散辐射限值符合相关要求(详见附件2)。
二、根据《中华人民共和国无线电频率划分规定》对有关射电天文业务保护的有关规定,在我国北京密云天文台、新疆乌鲁木齐南山天文台、上海佘山天文台、青海德令哈天文台等射电天文台址周围5公里范围内,禁止使用24GHz短距离车载雷达设备。
三、24GHz短距离车载雷达设备按微功率(短距离)无线电发射设备进行管理。
设备投入使用前需获得工业和信息化部核发的无线电发射设备型号核准证。
四、24GHz短距离车载雷达设备使用时,不得对其他无线电业务电台产生无线电干扰,也不得对其他无线电业务电台提出干扰保护要求。
特此通知。
附件1:发射信号的等效全向辐射功率谱密度限值附件2:窄带杂散辐射限值工业和信息化部2012年11月19日附件1:附件2:窄带杂散辐射限值。
射频接收机前端AGC系统的电路设计

射频接收机前端AGC系统的电路设计提纲:一、射频接收机前端AGC系统的基本原理及设计要点二、传统射频接收机前端AGC系统挑战及优化设计技术三、现代射频接收机前端AGC系统设计方法研究四、射频接收机AGC系统的性能评估与实验测量五、未来射频接收机前端AGC系统的发展趋势和展望一、射频接收机前端AGC系统的基本原理及设计要点AGC(Automatic Gain Control)系统是射频接收机的重要组成部分,在信道不稳定的环境下可以实现信号输入电平的自动控制。
其主要功能是控制单位电平内射频前端放大器的信息增益,以确保信号在最佳的动态范围内运行。
射频接收机前端AGC系统的设计要点主要包括信号放大段、包络检波环节、比较环节和控制回路。
其中,信号放大段的设计为AGC系统的核心,关系到整个系统性能的优劣。
当前,射频接收机前端AGC系统的设计主要分为两大类:一类是传统模拟AGC系统,它采用经典的线性控制回路,具有结构简单,功耗低,抗干扰能力强等优点;另一类是数字AGC系统,它基于DSP的现代控制理论,具有精度高,响应速度快等优点。
二、传统射频接收机前端AGC系统挑战及优化设计技术目前,传统AGC系统仍然是射频接收机中最常用的设计方案之一。
然而,传统AGC系统在设计中还存在一些挑战,主要包括信号失真、抗干扰能力不足和高功耗等问题。
为克服这些问题,优化设计技术主要包括:1、引入自适应控制器,利用反馈控制环节提高控制精度和系统鲁棒性,增强系统的稳定性和抗干扰能力。
2、优化模拟电路设计,提高系统带宽、增益平坦度和延时响应特性,并减少失真和噪声干扰。
3、使用低功耗模拟电路设计,降低系统功耗并提高信号处理速度。
三、现代射频接收机前端AGC系统设计方法研究现代射频接收机前端AGC系统采用数字控制理论,利用高速AD/DA转换器实现对系统的数字控制。
其优点在于精度高,控制方便和响应速度快等。
目前,现代AGC系统主要分为三类:1、基于改进的遗传算法和FPGA的AGC系统,该设计主要以FPGA为核心控制器,利用改进的遗传算法实现AGC控制回路,并通过DSP进行算法协调。
两大24GHz汽车毫米波雷达芯片方案

两大24GHz汽车毫米波雷达芯片方案毫米波雷达指工作在毫米波波段的雷达。
采用雷达向周围发射无线电,通过测定和分析反射波以计算障碍物的距离、方向和大小。
典型应用有汽车防撞雷达、直升机防控雷达和精密跟踪雷达等,目前最新的汽车毫米波雷达可以识别出车和行人。
汽车毫米波雷达芯片方案以下介绍一种基于UMS 公司推出的24GHz 集成收发芯片的汽车毫米波雷达方案。
24GHz 汽车毫米波雷达方案主要由24GHz 射频收发芯片、控制单元和CAN 总线接口组成,其中24GHz 射频收发芯片实现毫米波信号的生成、发射和接收,控制单元利用算法实现测距和测速的功能,CAN 总线接口负责和汽车其他部件通信,以下是24GHz 汽车毫米波雷达的基本框图:图1:24GHz 汽车毫米波雷达的基本框图基于该解决方案,可以实现盲点检测(BSD)、车道改变辅助(LCA)/偏离预警(LDW)、自适应巡航控制(ACC)等汽车防撞雷达的应用。
此外,也可以实现智能交通类测速测距、安防、工业控制等领域的测距、测速雷达的应用。
该解决方案的核心器件是UMS 公司推出的业内唯一采用砷化镓工艺的24GHz 集成收发芯片CHC2442,以下是该器件的主要性能:发射功率13.5dBm发射增益控制范围12dB接收增益37dB接收增益控制范围24dB噪声系数11dB(中频大于100KHz,射频增益最大)输入1dB 压缩点-16dBmVCO 相噪-90dBc/Hz@100KHz温度范围-40℃到125℃工作电压3.3V封装QFN4*5,满足RoHS 标准UMS 推出的24GHz 雷达收发芯片以汽车级的工作温度范围、更大的发射功率,优良的VCO 输出相噪等优势成为24GHz 汽车毫米波雷达方案的最佳选择。
24G 微波频率VCO 方案针对24GHz 汽车毫米波雷达系统,UMS 推出了适用于分立系统的压控振荡器(VCO)产品CHV2421-QDG。
该器件是一款GaAs InGaP 异质结双极性晶体管(HBT)MMIC VCO,CHV2421-QDG 内部集成了谐振器、负电阻器件、变容二极管和预分频器。
24GHz雷达高线性数字调频源设计
• 203•24GHz雷达高线性数字调频源设计广东工贸职业技术学院 浙江大学深圳研究院 钟催林浙江大学深圳研究院 李振林广东工贸职业技术学院 曾洁琼【摘要】本文设计了一个基于PLL实时跟踪DDS产生高线性调频源的技术方案,并通过实验得到验证。
简要介绍该方案的主要技术指标以及高线性数字调频源的具体设计过程,论述在设计过程中的重点和难点,并提出相应的解决方案,最终达到了各项技术指标。
【关键词】高线性;调频源;相位噪声;杂散1.引言数字式频率合成技术 (DDS)作为一种新的频率合成技术,将先进的数字信号处理理论与方法引入信号合成领域,DDS技术实际就是数字信号处理中信号综合的硬件实现的问题,即根据给定的信号的幅度、频率、相位等参数,产生所要求的信号,所以 DDS技术的关键是信号参数到信号波形变换的实现。
在 DDS系统中,信号用数字方法产生,可提供对信号相位、幅度和频率的数字控制,从理论上能以任何方式合成任意一个波形,且 DDS以其固有的良好的宽带特性,良好的幅度控制特性,在现代电子器件、通信技术、目标识别雷达、卫星通信等领域有着广泛的应用前景。
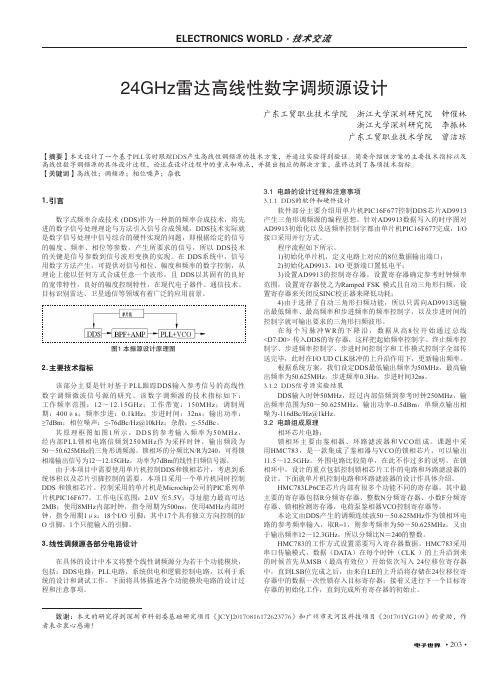
图1 本振源设计原理图2.主要技术指标该部分主要是针对基于PLL跟踪DDS输入参考信号的高线性数字调频微波信号源的研究。
该数字调频源的技术指标如下:工作频率范围:12~12.15GHz;工作带宽:150MHz;调制周期:400μs;频率步进:0.1kHz;步进时间:32ns;输出功率:≥7dBm;相位噪声:≤-76dBc/Hz@10kHz;杂散:≤-55dBc。
其原理框图如图1所示,D D S的参考输入频率为50M H z,经内部PLL锁相电路倍频到250MHz作为采样时钟,输出频段为50~50.625MHz的三角形调频源。
锁相环的分频比N/R为240,可得锁相端输出信号为12~12.15GHz,功率为7dBm的线性扫频信号源。
由于本项目中需要使用单片机控制DDS和锁相芯片,考虑到系统体积以及芯片引脚控制的需要,本项目采用一个单片机同时控制DDS 和锁相芯片。
德国Innosent原装进口24GHz雷达传感器IVS-162可用于交通测距测速的开发 IVS-162-37012
Emall:info@ 联系电话:0755-82428401
-1-
IVS 系列雷达产品的功能应用多样,包括:探测运动目标速度,辨别运动目标方向,并 且尤其适用于探测静态目标或动态目标的距离信息。其中,IVS-162、163 主要用于近距离 目标的信息探测,又兼其天线角度较宽、波束覆盖范围较广,因此其应用领域主要涉及自动 控制、电子安防等方面。
40
Pout
15
Δf
﹣1
增益 带宽
voltage offset 幅度 相位
20 DC – 50
100
1.0
2.2
60
90
水平方向
70
垂直方向
36
水平方向
13
垂直方向
13
VCC
4.75
5.0
ICC
35
TOP
﹣20
44 x 30 x8.3(19)
VCC
5.5
最大值 24.250
10 150 20
4.0 6 120
2 工作原理
IVS-162 和 IVS-163 的电路设计思想简洁巧妙,十分易于与用户的后端设计电路结合, 具有很好的兼容性。
具体特征说明如下: K 波段带 VCO 的雷达收发器 CW/FSK/FMCW 工作模式 高级低功耗 PHEMT 振荡器 低噪声 IF 前置放大器 独立的发射和接收路径,可获得最大增益 双通道工作可以探测目标的运动方向
IVS-162(163)使用说明
V 1.0
深圳华儒科技有限公司 公司地址:深圳市罗湖区银湖路专家公寓 A 栋东 702
Emall:info@ 联系电话:0755-82428401
目录
1 产品简介 ...............................................- 1 2 工作原理 ...............................................- 2 -
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
提交论文日期
二○一四年三月
万方数据
万方数据
西安电子科技大学 学位论文独创性(或创新性)声明
秉承学校严谨的学风和优良的科学道德,本人声明所呈交的论文是我个人在 导师指导下进行的研究工作及取得的研究成果。尽我所知,除了文中特别加以标 注和致谢中所罗列的内容以外,论文中不包含其他人已经发表或撰写过的研究成 果;也不包含为获得西安电子科技大学或其它教育机构的学位或证书而使用过的 材料。与我一同工作的同志对本研究所做的任何贡献均已在论文中做了明确的说 明并表示了谢意。 申请学位论文与资料若有不实之处,本人承担一切的法律责任。 本人签名: 日期:
万方数据
Abstract
People's living standards have greatly increased with the development of economy. Then the increasing number of cars brings a lot of the resulting traffic problems. Millimeter wave frequency modulated continuous wave (MMW-FMCW) radar is a combination of millimeter wave and frequency modulation continuous wave radar, the advantages of high resolution and easy miniaturization make it easier to grab market share. In this paper, on the basis of previous studies, the 24 GHz vehicle radar RF front-end is constructed. With the help of ADS simulation, the form of transmitting device and receiving device can be determined, so as the indicators of them. The RF front-end works at 24 GHz ~ 24.5 GHz. Transmitting device is chosen as the single-stage shock type and its transmit power needed to be 10 dBm. Receiving device is chosen as the zero intermediate frequency receiver, its baseband signal width is selected to be 1 MHz and sensitivity to be - 90 dBm. The gain of both the transmitting and receiving antenna are desired to about 20 dB and their side lobe gain less than 15 dB. Use UMS company’s CHV2421 QDG, CHR2421 QEG as transmitting and receiving device. Avago’s ADF4158 is used for phase-locked loop and ADP3300 used for 3.0 V power supply. Through the single device debugging, we can design the whole circuit. The 24 GHz vehicle radar transceiver module will be layout in the same circuit boards and meet the requirements of indicators. 24 GHz ~ 24.5 GHz antenna is designed with the form of rectangular microstrip patch antenna array, realized the high gain and miniaturization of vehicle radar antenna. As the result of all these works, 24 GHz vehicle radar RF front-end can be completed. Keywords: MMW-FMCW radar microstrip antenna vehicle radar TR Module
代
号
10701学Biblioteka 号1102120997
分 类 号
TN953
密
级
公开
题 (中、英文) 目
24GHz 车载雷达射频前端设计
Design of 24 GHz vehicle radar RF front-end
作 者 姓 名 学 科 门 类
宋惠轩 工学
指导教师姓名、职务 学科、专业
安翔 教授
电磁场与微波技术
万方数据
摘 要
随着经济的发展, 人民生活水平已经大幅提高, 目前私家车的数量急剧增加, 同时带来了大量随之而来的交通问题。毫米波调频连续波雷达( FMCW)结合了 毫米波和调频连续波雷达的优点,分辨率高及易小型化使其在车在雷达领域具有 广阔的市场前景和出色的发展空间。 本文在前人研究的基础上, 研究了 24GHz 车载雷达射频前端的搭建, 结合 ADS 仿真确定了发射组件与接收组件形式,并为射频系统提出指标。射频前端工作频 率为 24GHz~24.5GHz,发射采用单级震荡式,发射功率要求达到 10dBm;接收采 用零中频接收,选取基带信号带宽 1MHz,灵敏度-90dBm;发射接收天线增益皆 为 20dB 左右,主副瓣差距 15dB 以上。 使用 UMS 公司的 CHV2421-QDG、 CHR2421-QEG 作为发射接收组件,Avago 公司的 ADF4158 用于锁相环,ADP3300 用于 3.0V 供电,通过单个组件的设计调 试,确定整板的设计,将 24GHz 车载雷达收发组件布置在同一电路板上,最终满 足指标要求。完成了 24GHz~24.5GHz 天线的设计,采用了阵列矩形微带贴片天线 的形式,实现了车载雷达对天线高增益且小型化的要求。这些工作最终组成了 24GHz 车载雷达射频前端。 关键词:毫米波调频连续波雷达 车载雷达 发射接收组件 微带天线
西安电子科技大学 关于论文使用授权的说明
本人完全了解西安电子科技大学有关保留和使用学位论文的规定,即:研究 生在校攻读学位期间论文工作的知识产权单位属西安电子科技大学。学校有权保 留送交论文的复印件,允许查阅和借阅论文;学校可以公布论文的全部或部分内 容,可以允许采用影印、缩印或其它复制手段保存论文。同时本人保证,毕业后 结合学位论文研究课题再撰写的文章一律署名单位为西安电子科技大学。 (保密的论文在解密后遵守此规定) 本学位论文属于保密,在 本人签名: 导师签名: 年解密后适用本授权书。 日期: 日期:
万方数据
万方数据
目 录
第一章 绪论 ................................................................................................................ 1 1.1 研究背景............................................................................................................ 1 1.2 车载雷达系统发展现状..................................................................................... 2 1.3 本文的工作及章节安排..................................................................................... 3 第二章 车载雷达原理与方案 ..................................................................................... 5 2.1 雷达工作体制选择 ............................................................................................ 5 2.2 调频连续波(FMCW)雷达 ............................................................................. 6 2.2.1 测距与测速 .................................................................................................. 7 2.2.2 相位法测角 ................................................................................................ 10 2.3 射频系统方案 .................................................................................................. 11 第三章 发射组件与锁相环 ....................................................................................... 15 3.1 雷达发射机 ...................................................................................................... 15 3.1.1 基础知识介绍 ........................................................................................... 15 3.2 车载雷达发射组件设计................................................................................... 17 3.2.1 发射机形式选择及指标设定 .................................................................... 17 3.2.2 器件选择 ................................................................................................... 17 3.2.3 设计与测试 ............................................................................................... 20 3.3 锁相环 ............................................................................................................. 24 3.3.1 锁相环原理及主要参数 ............................................................................ 24 3.3.2 集成锁相环 ............................................................................................... 25 3.3.3 锁相环芯片选择........................................................................................ 26 3.3.4 锁相环电路设计........................................................................................ 28 第四章 接收组件设计............................................................................................... 31 4.1 雷达接收机 ...................................................................................................... 31 4.2 雷达接收组件主要技术参数 ........................................................................... 32 4.2.1 噪声 ........................................................................................................... 32 4.2.2 灵敏度 ........................................................................................................ 32