基于51单片机的超声波测距系统
基于51单片机超声波测距系统
基于51单片机超声波测距系统摘 要 :详细介绍了T/R40-16超声波传感器和超声波测距原理以及基于51单片机的测距原理。
以CX20106为核心实现超声波的发射与接收,采用单片机外部中断查询相应信号并实现一系列操作。
为了避开超声波从发射探头到接收探头的 “敏感时间”,采用了“延时接收”的方法。
测距结果将通过1602液晶显示出来。
关 键 词 :超声波;测距;CX20106;单片机。
0 引言 超声波(Ultrasonic waves)是指超过人的听觉范围以上(20kHz 以上)的声波[1]。
具有指向性强,能量消耗缓慢,传播距离较远等优点。
超声波测距是一种有效的非接触式测距方法,在利用传感器技术和自动控制技术相结合的测距方案中,超声波测距是目前应用最普遍的一种,因此在民用和工业领域都有较为广泛的应用。
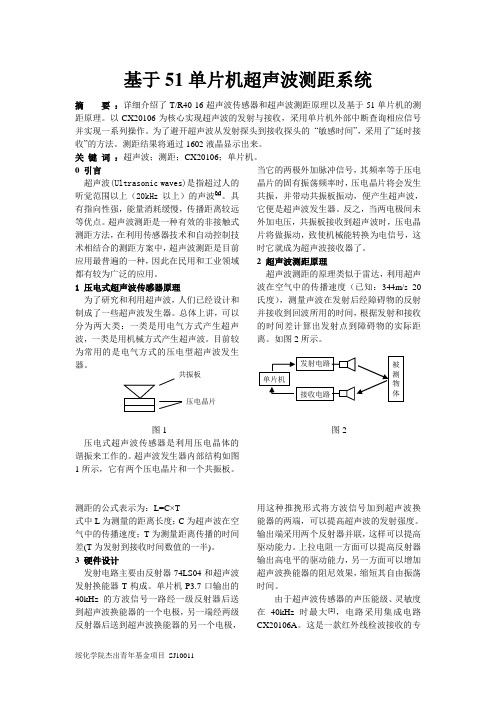
1 压电式超声波传感器原理 为了研究和利用超声波,人们已经设计和制成了一些超声波发生器。
总体上讲,可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。
目前较为常用的是电气方式的压电型超声波发生器。
图1压电式超声波传感器是利用压电晶体的谐振来工作的。
超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波,它便是超声波发生器。
反之,当两电极间未外加电压,共振板接收到超声波时,压电晶片将做振动,致使机械能转换为电信号,这时它就成为超声波接收器了。
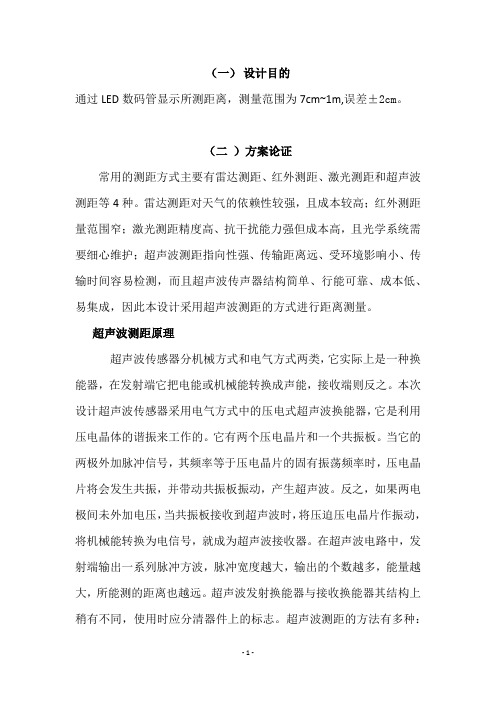
2 超声波测距原理 超声波测距的原理类似于雷达,利用超声波在空气中的传播速度(已知:344m/s 20氏度),测量声波在发射后经障碍物的反射并接收到回波所用的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。
如图2所示。
图2测距的公式表示为:L=C×T 式中L 为测量的距离长度;C 为超声波在空气中的传播速度;T 为测量距离传播的时间差(T 为发射到接收时间数值的一半)。
基于51单片机的超声波测距报告
- 11 -
(六)附录 程序清单 ;********************************************
;* 超声波测距器 * ;* 采用 STC 89C54RC+ 12MHZ 晶振 * ;* 采用共阴 LED 显示器 LRM 2011.06.20 * ;******************************************** ;测距范围 7CM-1M,堆栈在 4FH 以上,20H 用于标志 ;显示缓冲单元在 40H-43H,使用内存 44H、45H、46H 用于计算距离 ; VOUT EQU P1.0 ; 红外脉冲输出端口 ; ;******************************************** ;* 中断入口程序 * ;******************************************** ; ORG 0000H LJMP START ORG 0003H ;中断 0 LJMP PINT0 ORG 000BH ;定时器 0 溢出 LJMP INTT0 ORG 0013H ;中断 1 RETI ORG 001BH ;定时器 1 溢出 LJMP INTT1 ORG 0023H ;串行口中断 RETI ORG 002BH RETI ; ;******************************************** ;* 主 程 序 * ;******************************************** ; START: MOV SP,#4FH MOV R0,#40H ;40H-43H 为显示数据存放单元 (40H 为最高位) MOV R7,#0BH CLEARDISP: MOV @R0,#00H INC R0 DJNZ R7,CLEARDISP
基于51单片机超声波测距.
一设计要求(1)设计一个以单片机为核心的超声波测距仪,可以应用于汽车倒车、工业现场的位置监控;(2)测量范围在0.50~4.00m,测量精度1cm;(3)测量时与被测物无直接接触,能够清晰稳定地显示测量结果。
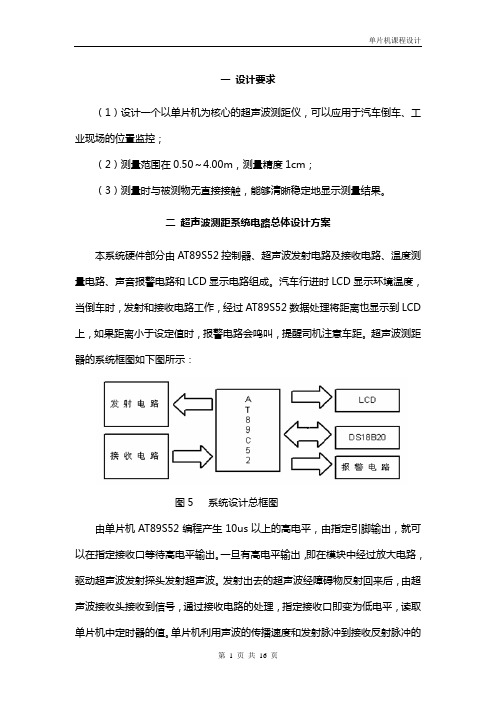
二超声波测距系统电路总体设计方案本系统硬件部分由AT89S52控制器、超声波发射电路及接收电路、温度测量电路、声音报警电路和LCD显示电路组成。
汽车行进时LCD显示环境温度,当倒车时,发射和接收电路工作,经过AT89S52数据处理将距离也显示到LCD 上,如果距离小于设定值时,报警电路会鸣叫,提醒司机注意车距。
超声波测距器的系统框图如下图所示:图5 系统设计总框图由单片机AT89S52编程产生10us以上的高电平,由指定引脚输出,就可以在指定接收口等待高电平输出。
一旦有高电平输出,即在模块中经过放大电路,驱动超声波发射探头发射超声波。
发射出去的超声波经障碍物反射回来后,由超声波接收头接收到信号,通过接收电路的处理,指定接收口即变为低电平,读取单片机中定时器的值。
单片机利用声波的传播速度和发射脉冲到接收反射脉冲的时间间隔计算出障碍物的距离,并由单片机控制显示出来。
由时序图可以看出,超声波测距模块的发射端在T0时刻发射方波,同时启动定时器开始计时,当收到回波后,产生一负跳变到单片机中断口,单片机响应中断程序,定时器停止计数。
计算时间差,即可得到超声波在媒介中传播的时间t,由此便可计算出距离。
图6 时序图三超声波发射和接收电路的设计分立元件构成的发射和接收电路容易受到外界的干扰,体积和功耗也比较大。
而集成电路构成的发射和接收电路具有调试简单,可靠性好,抗干扰能力强,体积小,功耗低的优点,所以优先采用集成电路来设计收发电路。
3.1 超声波发射电路超声波发射电路包括超声波产生电路和超声波发射控制电路两部分,可采用软件发生法和硬件方法产生超声波。
在超声波的发射电路的设计中,我们采用电路结构简单的集成电路构成发射电路:图7 由反相器构成的超声波发射电路图7是由反相器74HC04构成的发射电路,用反相器74HC04构成的电路简单,调试容易,易通过软件控制。
基于51单片机超声波测距仪

基于51单片机超声波测距仪基于51单片机的超声波测距仪设计摘要利用超声波进行测距有许多优点比如不受光强度、色彩和电磁场等外界因素的影响,而且超声波传感器的价位较低、结构也较为简单,超声波以声速传播,方便收发与计算。
在汽车倒车雷达、移动机器人的避障、特别是测量距离等许多方面都已有了非常普遍的应用。
本次毕业设计的超声波测距仪是在STC89C51单片机的基础上设计的,在分析和了解了超声波的一些优点和特性后,又查看了利用超声波测距的基本原理。
最后决定使用51单片机系统和超声波传感器共同组成。
设计的超声波测距仪的硬件部分主要包括电源及复位模块、单片机与超声波模块组成的超声波发射模块、超声波接收模块、LED数码显示模块和扩展报警模块。
软件部分主要包括单片机主程序、根据超声波发射与接收计算距离程序、LED距离显示程序、按键控制程序和蜂鸣器报警程序,这样安排使得系统具有模块化的特点。
系统容易进行控制,具有可靠地的性能,具有较高的测量精度,最重要的是能对距离进行实时测量。
关键词:单片机,测距仪,超声波,实时测量Design of Ultrasonic Distance Meter Based on 51 MCMABSTRACTUsing ultrasonic ranging has many advantages for example, from the effects of light intensity, color and electromagnetic field and other external factors and price lower ultrasonic sensors, the structure is simple, ultrasonic sounds velocity, convenient transceiver and calculation. In the car reverse radar, mobile robot obstacle avoidance, especially measuring distance and many other aspects have been very common application.The graduation design of ultrasonic range finder based on STC89C51 MCU design, analysis and understanding of the some advantages and characteristics of ultrasonic and looked at the use of the basic principle of ultrasonic distance measurement. Finally, the composition of the 51 single-chip microcomputer system and ultrasonic sensor is decided.. The design of ultrasonic rangefinder hardware part consists of the power and reset module, SCM and ultrasonic module consists of ultrasonic emission module, ultrasonic receiving module, LED digital display expansion module and alarm module. Software part mainly includes MCU program, according to the ultrasonic transmitting and receiving computing program distance, the distance of LED display program, key control procedures and buzzer alarm procedures, this arrangement enables the system to have the characteristics of modular. The system is easy to control and has the reliable performance, and has the higher accuracy, and the most important is the real-time measurement of the distance.KEY WORDS: Single chip microcomputer,Range finder,Ultrasonic,Real-time measurement目录摘要 (I)目录 (III)第1章绪论 (1)1.1 研究背景 (1)1.2 研究的主要意义 (1)第2章系统电路设计 (3)2.1 系统结构设计 (3)2.2 电路总体设计方案 (3)2.2.1 发射与接收电路设计方案 (3)2.2.2 显示电路设计方案 (5)2.2.3 报警电路设计方案 (6)2.2.4 系统复位电路设计 (6)第3章系统硬件设计 (8)3.1 单片机概述 (8)3.1.1 STC89C51主要性能 (8)3.1.2 STC89C51外部结构及特性 (8)3.1.3 STC89C51内部组成 (11)3.2 超声波测距模块 (12)3.2.1 超声波传感器介绍 (12)3.2.2HC-SR04超声波测距芯片的性能特点 (12)3.2.3 超声波时序图 (15)3.3 驱动显示电路及报警电路 (15)3.3.1LED数码管显示电路 (16)3.3.2 蜂鸣器报警电路 (17)3.4HC-RS04超声波测距原理 (17)3.5 按键设置电路 (18)第4章系统软件设计 (21)4.1 系统主程序 (21)4.2 显示距离子程序 (22)4.3 报警子程序 (22)4.4 按键子程序 (23)第5章系统仿真 (25)5.1 系统仿真环境——Proteus (25)5.2 仿真 (25)5.3 误差及特性分析 (26)结论 (28)谢辞 (29)参考文献 (30)第1章绪论1.1 研究背景超声波测距法是通过超声波测量从已知位置到被测物体表面的距离的利用超声波的方法。
at89c51超声波测距工作原理

at89c51超声波测距工作原理
基于AT89C51单片机的超声波测距系统采用脉冲回波方式,充分利用单片机的硬件和软件资源,自动实现超声波的发射与接收控制。
系统充分考虑了环境温度对超声波传播速度的影响,通过单片机中计数器所计超声波往返所经历的时间,通过公式换算就可以计算出超声波发射器与被测物之间的距离。
其原理是:超声波发射器发出的超声波在空气中以速度传播,在接触到被测物体时被反射返回,由接收器接收。
往返时间为t,由s=vt/2即可算出被
测物体的距离。
如需了解更多关于AT89C51超声波测距工作原理的信息,建议查阅
AT89C51单片机使用手册或咨询专业技术人员。
基于51单片机的超声波测距系统的毕业设计

基于51单片机的超声波测距系统的毕业设计超声波测距系统是一种常见的非接触式测距技术,通过发送超声波信号并测量信号的回波时间来计算距离。
本文将介绍基于51单片机的超声波测距系统的毕业设计。
首先,我们需要明确设计的目标。
本设计旨在通过51单片机实现一个精确、稳定的超声波测距系统。
具体而言,我们需要实现以下功能:1.发送超声波信号:通过51单片机的IO口控制超声波发射器,发送一定频率和波形的超声波信号。
2.接收回波信号:通过51单片机的IO口连接超声波接收器,接收并放大返回的超声波信号。
3.信号处理:根据回波信号的时间延迟计算出距离,并在显示器上显示出来。
4.稳定性和精确性:设计系统时需考虑测量过程中误差的影响,并通过合适的算法和校准方法提高系统的稳定性和精确性。
接下来,我们需要选择合适的硬件和软件配合51单片机实现上述功能。
硬件方面:1.51单片机:选择一款性能稳定、易于编程的51单片机,如STC89C522.超声波模块:选择一款合适的超声波传感器模块,常见的有HC-SR04、JSN-SR04T等。
模块一般包括发射器和接收器,具有较好的测距性能。
3.显示设备:选择合适的显示设备,如7段LED数码管或LCD显示屏,用于显示测距结果。
软件方面:1.C语言编程:使用C语言编写51单片机的程序,实现超声波测距系统的各项功能。
2.串口通信:通过串口与上位机进行通信,可以对系统进行监控和远程控制。
3.算法设计:选择合适的算法计算超声波回波时间延迟,并根据时间延迟计算距离值。
在设计过程中,我们需要进行以下步骤:1.硬件连接:按照超声波模块的说明书,将模块的发射器和接收器通过杜邦线与51单片机的IO口连接。
2.软件编程:使用C语言编写51单片机的程序,实现超声波模块的控制、信号接收和处理、距离计算等功能。
3.系统测试:进行系统的功能测试和性能测试,验证系统的可靠性和准确性,同时调试系统中出现的问题。
4.系统优化:根据测试结果,对系统进行优化,提高系统的稳定性和精确性。
基于51单片机超声波测距报警系统课程设计

基于51单片机超声波测距报警系统课程设计一、引言超声波测距技术是一种常见的非接触式测距技术,具有测距范围广、精度高等优点。
在日常生活中,超声波测距技术被广泛应用于车辆倒车雷达、智能家居中的人体感应等领域。
本文将介绍基于51单片机的超声波测距报警系统的课程设计。
二、设计思路本课程设计主要分为硬件设计和软件设计两部分。
硬件部分主要包括超声波模块、LCD显示屏、蜂鸣器等模块的连接和电路设计;软件部分主要包括51单片机程序设计及LCD显示程序编写。
三、硬件设计1. 超声波模块连接超声波模块是实现测距功能的核心部件。
在本课程设计中,我们采用HC-SR04型号的超声波模块。
该模块需要连接到51单片机上,具体连接方式如下:- 将VCC引脚连接到51单片机上的5V电源;- 将GND引脚连接到51单片机上的GND;- 将Trig引脚连接到P2.0口;- 将Echo引脚连接到P2.1口。
2. LCD显示屏连接LCD显示屏用于显示测距结果和报警信息。
在本课程设计中,我们采用1602型号的LCD显示屏。
该模块需要连接到51单片机上,具体连接方式如下:- 将VSS引脚连接到51单片机上的GND;- 将VDD引脚连接到51单片机上的5V电源;- 将VO引脚连接到一个10K电位器,再将电位器两端分别接到GND 和5V电源;- 将RS引脚连接到P1.0口;- 将RW引脚连接到P1.1口;- 将EN引脚连接到P1.2口;- 将D4-D7引脚分别连接到P0口的高四位。
3. 蜂鸣器连接蜂鸣器用于报警。
在本课程设计中,我们采用被动式蜂鸣器。
该模块需要连接到51单片机上,具体连接方式如下:- 将正极引脚(一般为长针)连接到51单片机上的P3.7口;- 将负极引脚(一般为短针)连接到51单片机上的GND。
四、软件设计1. 51单片机程序设计在本课程设计中,我们采用Keil C51作为编程工具,使用C语言编写程序。
主要程序流程如下:- 定义超声波模块的Trig和Echo引脚;- 定义LCD显示屏的RS、RW、EN和D4-D7引脚;- 定义蜂鸣器的引脚;- 定义变量存储测距结果和报警状态;- 初始化LCD显示屏、超声波模块等模块;- 循环执行以下操作:- 发送超声波信号并计算回波时间,从而得到距离值;- 根据距离值判断是否需要报警,并控制蜂鸣器发出报警声音;- 将测距结果和报警状态显示在LCD显示屏上。
51单片机实现超声波测距报警系统
51单片机实现超声波测距报警系统超声波测距报警系统是一种基于51单片机的硬件电路和软件程序开发的测距设备。
本文将从设备原理和设计、电路连接和程序开发等方面进行详细介绍。
一、设备原理和设计超声波测距报警系统的原理是利用超声波传感器测量并计算被测物体与传感器的距离,并通过单片机采集和处理超声波信号,根据测量结果触发报警和显示等功能。
1.超声波传感器:超声波传感器是用来发射和接收超声波信号的装置,一般由发射器和接收器组成。
发射器发射超声波信号,接收器接收被测物体反射的超声波信号。
2.单片机:本系统采用51单片机作为控制核心,负责采集和处理超声波信号,控制报警和显示等功能。
3.报警器:当距离小于设定阈值时,触发报警器发出声音或闪光等警告信号。
4.显示屏:用来显示测量结果,一般为数码管或液晶显示屏。
5.电源和电路:提供系统所需的电源和信号连接电路。
二、电路连接超声波测距报警系统的电路连接主要包括超声波传感器、单片机、报警器、显示屏以及电源等模块。
1.超声波传感器连接:将超声波传感器的发射端和接收端分别连接到单片机的引脚上,发射端连接到P1口,接收端连接到P2口。
2.报警器连接:将报警器连接到单片机的一个IO口,通过控制该IO 口的高低电平来触发报警。
3.显示屏连接:将显示屏连接到单片机的相应IO口,通过向显示屏发送数据来显示测量结果。
4.电源连接:将电源连接到单片机以及其他模块的供电端,确保系统正常工作。
三、程序开发1.初始化设置:包括引脚和端口的初始化设置,包括超声波传感器引脚和单片机的IO口设置。
2.测量距离:通过单片机控制超声波传感器发射超声波信号,并通过接收器接收反射的超声波信号,计算出被测物体与传感器的距离。
3.报警触发:根据设定的阈值,当测量到的距离小于阈值时,通过控制报警器发出声音或闪光等警告信号。
4.显示结果:通过控制显示屏将测量结果显示出来。
5.循环检测:通过循环检测的方式,不断进行测量并处理数据,实时更新测量结果和触发报警。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
封面目录摘要 (1)一. 绪论 (2)二.超声波测距的原理 (3)2.1 超声波的基本理论 (3)2.2 超声波测距系统原理 (7)三. 系统硬件的具体设计与实现 (8)3.1 系统原理和框图 (8)3.2 功能模块的设计 (8)3.2.1 单片机介绍 (8)3.2.1.1 AT89C51管脚说明 (9)3.2.1.2 AT89C51主要特性 (10)3.2.1.3芯片擦除 (11)3.2.2 超声波测距模块HC-SR04 (11)3.2.2.1 产品特点 (11)3.2.2.2 基本原理 (12)3.2.2.3 电气参数 (12)3.2.2.4 超声波时序图 (12)四. 系统软件设计 (13)1. 程序设计思路 (13)2. 程序流程图 (13)3. 程序 (15)五. 总结 (16)六. 致谢 (17)七. 参考文献 (18)八.附录 (19)1.原理图 (19)2.PCB图 (20)3.主程序 (20)摘要基于传统的测距方法在很多特殊场合:如带腐蚀的液体,强电磁干扰,有毒等恶劣条件下,测量距离存在不可克服的缺陷,超声波测距能很好的解决此类的问题。
本系统主要以AT89C51单片机为核心,结合超声波测距模块HC-SR04、数码管、蜂鸣器等硬件平台,对超声波测距系统的原理、数码管显示、单片机的应用等进行了分析和验证。
关键词:超声波测距模块,AT89C51,数码管。
AbstractIn many special occasions, traditional measuring distance methods based on the existence of insurmountable distance measuring defects, such as the measurement of corrosion in the liquid with strong electromagnetic interference, toxic and other adverse conditions. The ultrasonic range can be a very good solution to the problem. This system mainly uses AT89C51 microcontroller as the core,hardware platform combined with the HC-SR04 ultrasonic ranging module,digital tube,buzzer etc. Analyzed and validated the principle of ultrasonic ran,d igital tube’s display,the application of single-chip microcomputer etc.Keywords: ultrasonic ranging module,AT89C51,Digital tube.一. 绪论随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
在新的世纪里,面貌一新的测距仪将发挥更大的作用。
在基于传统的测力距离存在不可克服的缺陷。
例如,液面测量就是一种距离测量,传统的电极法是采用差位分布电极,通过给电或脉冲来检测液面,电极长期浸泡于水中或其他液体中,极易被腐蚀、电解,失去灵敏性。
由于超声波具有强度大,方向性好等特点,利用超声波测量距离就可以解决这些问题,因此超声波测量距离技术在工业控制、勘探测量、机器人定位和安全防范等领域得到了广泛的应用。
超声波测距电路可以由传统的模拟或者数字电路构建,但是基于这些传统电路构建的系统往往可靠性差,调试困难,可扩展性差,所以基于单片机的超声波测距系统被广泛的应用。
通过简单的外围电路发生和接收超声波,单片机通过采样获取到超声波的传播时间,用软件来计算出距离,其测量电路小巧,精度高,反映速度快,可靠性好。
二.超声波测距的原理2.1 超声波的基本理论超声波是一门以物理、电子、机械、以及材料科学为基础的、各行各业都要使用的通用技术之一。
该技术在国民经济中,对提高产品质量,保障生产安全和设备安全运作,降低生产成本,提高生产效率特别具有潜在能力。
因此,我国对超声波的研究特别活跃。
超声技术是通过超声波的产生、传播以及接收的物理过程完成的。
超声波具有聚束、定向及反射、投射等特性。
按超声波振动辐射大小不同大致可以分为:用超声波使物体或物性变化的功率应用,称之为功率超声;用超声波获取信息,称为检测超声。
超声波是听觉阈值之外的振动,其频率范围在104——1012Hz ,其中通常的频率大约在104——310⨯6之间。
超声波在超声场(被超声波充满的范围)传播时,如果超声波的波长与超声场相比,超声场很大,超声波就像处在一种无限的介质中,超声波自由地向外扩散;反之,如果超声波的波长与相邻介质的尺寸相近,则超声波受到界面限制不能自由的向外扩散。
于是超声波在传播过程中有如下的特性和作用:2.1.1 超声波的传播速度超声波在介质中可以产生三中形式的振荡波:横波——质点振动方向垂直于传播方向的波;纵波——质点振动方向与传播方向一致的波;表面波——质点振动介于纵波和横波之间,沿表面传播的波。
横波只能在固体中传播,纵波能在固体液体中和气体中传播,表面波随深度的增加其衰减很快。
为了测量各种状态下的物理量多采用纵波形式的超声波。
超声波的频率越高,越与光波某些特性相似。
超声波与气其他声波一样,其传播速度与介质密度和弹性特性有关。
超声波在气体和液体中,其传播速度C gL =(a B ρ1)21式中 ρ——介质的密度;a B ——绝对压缩系数。
可以推导出超声波在空气种传播速度T C G ⨯+=61.04.331。
(T 为环境温度)。
超声波在固体中的传播速度分两种情况:(1)纵波在固体介质中的传播速度其传播与介质的形状有关。
21)(ρE C q = (细棒)212])1([μρ-=E C q (薄板) 2121)34(])21)(1()1([ρμμρμG K E C q +=-+-= (无限介质)式中 E ——杨氏模具;μ——泊松系数;K ——体积弹性模具;G ——剪片弹性模。
(2)横波声速公式为2121)(])1(2[ρμρG E C q =+⨯= (无限介质) 在固体中,μ介于0——5之间,因此一般可视为横波声速为纵波的一半。
2.1.2 超声波的物理性质当超声波传播到两种特性不同的介质的平面上时,一部分被反射;另一部分透射过界面,在相邻的介质内部继续传播;这样的两种情况称之为超声波的反射和折射,如图2.1.2所示:图2.1.2 超声波的反射和折射(1) 超声波的反射和折射当超声波传播到两种特性阻抗不同介质的平面分界面上时,一部分超声波被反射;另一部分透射过界面,在相邻介质内部继续传播;这样的两种情况称之为超声波的反射和折射,如图2.1.2所示。
声波的反射系数和透射系数可以分别由如下两式求得:11211222cos cos cos cos c c c c R ρραβρραβ+-= 11221122cos cos 2c c c c T ρρβαρρ+= 式中:βα,——分别为声波的入射角和反射角;2211,c c ρρ——分别为两介质的特征阻抗,其中21,c c 为反射波和折射波的速度。
反射角、折射角与声速21,c c 满足折射定律关系式:21sin sin c c =βα。
当超声波垂直入射界面时,即0==βα,则: 1122112211c c c c R ρρρρ+-= 1122112212c c c c T ρρρρ+= 如果sin α>21c c ,入射波完全被反射,在相邻两个介质中没有折射波。
如果超声波斜入射到两个固体介质面或两粘滞弹性介质面时,一列斜入射的纵波不仅产生反射纵波和折射纵波,而且还产生反射横波和折射横波。
(2)超声波的衰减超声波在一种介质中传播,其声压和声强按指数函数规律衰减。
在平面波的情况下,距离声源x 处的声压p 和声强I 的衰减规律如下: Ax e p p -=0Ax e I I 20-=式中:00,I p ——距离声源x=0处的声压和声强;x ——超声波与声波间的距离;A ——衰减系数,单位为cm N p /(奈培/厘米)。
(3)超声波的干涉如果在一种介质中传播几个声波,于是产生波的干涉现象。
若以两个频率相同,振幅1ξ和2ξ不等,波程差为d 的两个波干涉为例,该两个波合成振幅为212122211)2cos 2(λπξξξξξd++=,其中λ为波长。
从上式看出,当d=0或d=λn (n 为整数)时,合成振幅r ξ达到最大值;当d=,...)5,3,1(2=n n λ时,合成振幅r ξ为最小值。
当ξξξ==21时,r ξλπξd cos 2=;当d 2λ=的奇数倍时,两波相互抵消合成幅度为0。
由于超声波的干涉,在辐射器的周围形成一个包括最大最小的扬声场。
2.1.3 超声波对声场产生的作用(1) 机械作用超声波传播过程中,会引起介质质点交替的压缩与伸张,构成了压力的变化,这种压力的变化将引起机械效应。
超声波引起质点的运动,虽然位移和速度不大,但是与超声波振动的频率的平方成正比的质点的加速度却很大。
有时足以达到破坏介质的程度。
(2) 空化作用在流体动力学指出,存在于液体中的微气泡在声场的作用下振动,当声压达到一定的值时,气泡将迅速膨胀,然后突然闭合,在气泡闭合时产生冲击波,这种膨胀、闭合、振动等一系列动力学过程称为空化。
(3) 热学作用如果超声波作用于介质时被介质所吸收,实际上也就是有能量吸收,同时,由于超声波的振动,使介质产生强烈的高频振荡介质相互摩擦产生热热量,这种能量使介质温度升高。
2.1.4 超声波传感器超声波传感器主要有电致伸缩和磁致伸缩两类,电致伸缩采用双压电陶瓷晶片制成,具有可逆特性。