GUI_Simulink联合仿真说明
simulink仿真说明
Simulink是Simulation和link仿真链接。
是一个附加组件,为用户提供了一个建模与仿真的工作平台,由于许多功能是基于MATLAB平台的。
必须在MATLAB环境中运行,也把他称为一个MATLAB的工具箱。
以前MATLAB仿真编程是在文本窗口中进行的。
输入函数是命令和MATLAB 函数,在simulink 中与用户的交互接口是基于windows的模型化图形输入,用户可以通过单击拖动鼠标的方式绘制和组织系统,并完成对系统的仿真。
因此对于我们来说只需知道这些功能模块的输入输出、功能以及图形界面的使用方法。
就可以用鼠标和键盘进行仿真。
三种方法进入Simulink1、在MATLAB菜单栏中单击FILE,在下拉菜单的NEW选项中单击MODEL.2、在MATLAB工具栏中单击彩色图标,然后在打开的模型库浏览器窗口中单击‘新建文件‘3、在MATLAB命令窗口中输入Simulink,然后在打开的模型库浏览器窗口中单击‘新建文件‘。
一、模块的提取左键拖曳右键add to二、模块的移动放大和缩小移动:左键拖曳选中后用方向键脱离线移动按住shift 然后拖曳缩放 : 点击模块四个角拖曳三、复制粘贴和删除和windows一样删除选择clear四、模块的旋转:右键点击然后选择Flip block 顺时针转180度 rotate block顺时针90度。
五、模块名的修改移动:单击该模块名出现一个小框可以像文本一样修改移动还可以右键单击然后Hide name六、模块参数设置:双击七、模块连接:光标的箭头对准模块的输出端变成+后按下左键拖曳到另一个输入端松开左键。
八、连线的弯折开始画线时,在需要弯折的地方松开鼠标停顿一下,然后继续按下鼠标左键改变方向即可。
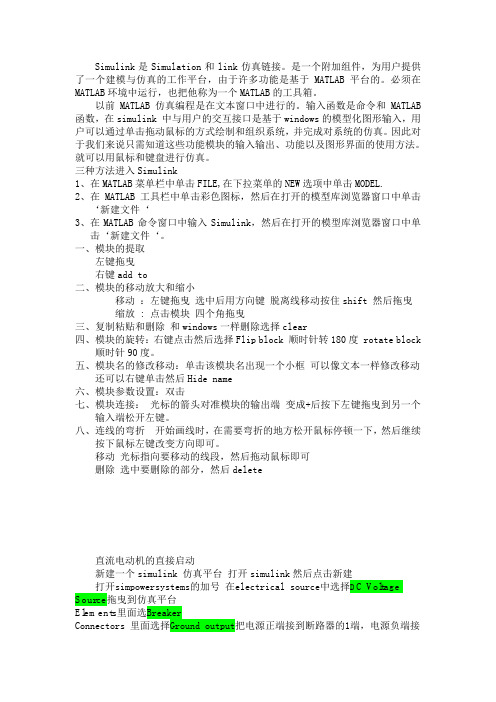
移动光标指向要移动的线段,然后拖动鼠标即可删除选中要删除的部分,然后delete直流电动机的直接启动新建一个simulink 仿真平台打开simulink然后点击新建打开simpowersystems的加号在electrical source中选择D C Voltage Source拖曳到仿真平台Elements里面选BreakerConnectors 里面选择Ground output把电源正端接到断路器的1端,电源负端接地。
Simulink_modelsim联合仿真
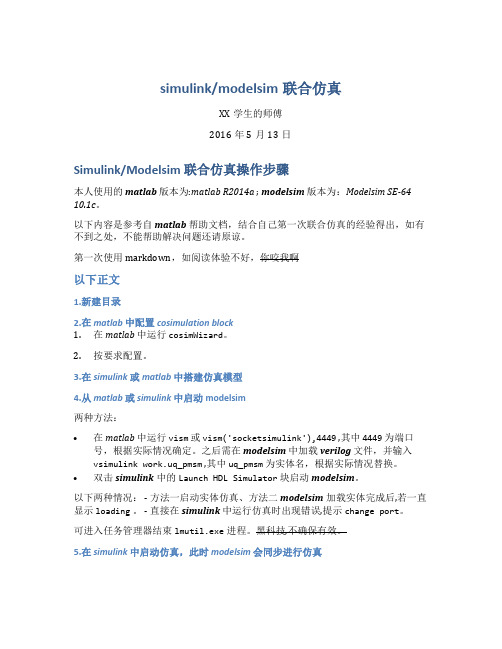
simulink/modelsim联合仿真XX学生的师傅2016年5月13日Simulink/Modelsim 联合仿真操作步骤本人使用的matlab版本为:matlab R2014a ; modelsim版本为:Modelsim SE-64 10.1c。
以下内容是参考自matlab帮助文档,结合自己第一次联合仿真的经验得出,如有不到之处,不能帮助解决问题还请原谅。
第一次使用markdown,如阅读体验不好,你咬我啊以下正文1.新建目录2.在matlab中配置cosimulation block1.在matlab中运行cosimWizard。
2.按要求配置。
3.在simulink或matlab中搭建仿真模型4.从matlab或simulink中启动modelsim两种方法:•在matlab中运行vism或vism('socketsimulink'),4449 ,其中4449为端口号,根据实际情况确定。
之后需在modelsim中加载verilog文件,并输入vsimulink work.uq_pmsm ,其中uq_pmsm为实体名,根据实际情况替换。
•双击simulink中的Launch HDL Simulator块启动modelsim。
以下两种情况: - 方法一启动实体仿真、方法二modelsim加载实体完成后,若一直显示loading。
- 直接在simulink中运行仿真时出现错误,提示change port。
可进入任务管理器结束lmutil.exe进程。
黑科技,不确保有效。
5.在simulink中启动仿真,此时modelsim会同步进行仿真。
simulink仿真技术

封装子系统指的是将已经建立好的具有一定功能,且功能完全一致的模 块封装在一起。通过定义用户自己的图标、参数设置对话框以及帮助文 档等等,可以使封装后的子系统与simulink中内置的系统模块具有相同的 操作:双击封装后的子系统模块以打开模块参数设置对话框进行参数设 置,将系统仿真所需要的参数传递到子系统之中;同时可以查看模块的 帮助文档以获得子系统输入输出关系、子系统功能以及模块描述等帮助 信息。除此之外,封装后的子系统还拥有自己的工作区。
1)模块选择 模块选定操作是许多其它操作(如复制、移动、删除)的前导操作。被选定的 模块四个角处出现小黑块,这种小黑块称为柄(handle)。 选定单个模块的操作方法:用鼠标指向待选模块,点击鼠标左键即可。 选定多个模块的操作方法: 方法一:按下【Shift】键,依次为击所需选定的模块; 方法二:按住鼠标任一键,拉出矩形虚线框,将所有待选取模块包在其中,然 后松开按键,于是矩形里所有模块(包括与连接模块的信号线)均被选中 。 如图2-13所示。
封装子系统具有如下特点:
(1)自定义子系统模块及其图标。
(2)用户双击封装后的图标时显示子系统参数设置对话框。
(3)用户自定义子模块帮助文档。 (4)封装后的子系统模块拥有自己s的imu工lin作k仿区真。技术
MATLAB应用技术
下面以实际的例子来说明如何进行子系统封装,并全面介绍子系统的封装 技术。
simulink仿真技术
MATLAB应用技术
8)模块名的操作
修改模块名:点击模块名,将在原名字的四周出现一个编辑框。此时,就
可对模块名进行修改。当修改完毕,将光标移出编辑框,点击即结束修改。
模块名字体设置:选用菜单【Format:Font】,打开字体对话框后,根据
Simulink仿真操作基本教程
◼ 在 Simulink 模 型 或 模 块 库 窗
口内,用鼠标左键单击所需 模块图标,图标四角出现黑 色小方点,表明该模块已经 选中。
c) 模块拷贝及删除
◼ 在模块库中选中模块后,按 住鼠标左键不放并移动鼠标 至目标模型窗口指定位置, 释放鼠标即完成模块拷贝。
◼ 模块的删除只需选定删除的 模块,按Del键即可。
a) 启动Simulink。
➢ 单击MATLAB Command窗口工具条上的Simulink图标,或者
在MATLAB命令窗口输入simulink,即弹出图示的模块库窗 口界面(Simulink Library Browser)。该界面右边的窗口给出 Simulink所有的子模块库。
➢ 常用的子模块库有 Sources( 信 号 源 ) , Sink( 显 示输出),Continuous(线性连 续系统),Discrete(线性离 散系统),Function & Table (函数与表格),Math(数学 运算), Discontinuities (非 线性),Demo(演示)等。
图9-15 定步长算法
图9-16 变步长算法
第一章 Simulink动态仿真
① Solver页 ➢ Error Tolerance(误差限度): 算法的误差是指当前状态值与当前
状态估计值的差值,分为Relative tolerance(相对限度)和Absolute tolerance(绝对限度),通常可选auto。
第一章 Simulink动态仿真
a) 启动Simulink
① 用鼠标右键点击Simulink菜单项,则弹出一菜单条,点击该菜单
条即弹出该子库的标准模块窗口.如单击左图中的【Sinks】,出现 “Open the ‘Sinks’Library”菜单条,单击该菜单条,则弹出右图所 示的该子库的标准模块窗口。
基于MatlabSimulink和GUI的运动控制系统虚拟实验平台设计
谢谢观看
2、提高效率:通过计算机硬件虚拟实验平台进行实验,用户可以在短时间 内完成实验设计、模拟和测试等整个过程。此外,该平台还可以实现多用户同时 使用,提高了实验效率。
3、增强安全性:在虚拟环境中进行实验,可以避免由于误操作或者不规范 操作导致的设备损坏或者人员伤害,增强了实验的安全性。
4、丰富的实验资源:计算机硬件虚拟实验平台可以提供丰富的实验资源, 包括各种类型的CPU、内存、I/O接口等,可以满足不同用户的需求。
四、结论
计算机硬件虚拟实验平台的设计与实现具有重要的现实意义和实际应用价值。 该平台可以降低实验成本、提高实验效率、增强安全性以及提供丰富的实验资源。 为了实现该平台,我们需要选择合适的硬件设计工具、模拟和仿真工具、调试工 具和集成开
发环境等工具,并提供可视化工具帮助设计人员更好地理解和分析实验结果。 未来的计算机硬件虚拟实验平台将更加完善和强大,为计算机硬件设计和教育领 域提供更多的可能性。
2、智能控制:通过遥控器、手机App等设备控制家电设备,如空调、加湿器、 灯光、窗帘等;支持多种智能场景模式,如离家模式、会客模式、睡眠模式等; 将控制状态通过GUI界面实时展示给用户。
参考内容二
随着科学技术的发展,虚拟仿真实验平台已成为实验教学中的重要工具。虚 拟仿真实验平台可以为学生提供一个高度仿真的实验环境,帮助学生更好地理解 和掌握实验原理和方法。在众多虚拟仿真实验平台中,基于LabVIEW的平台设计 具有广泛的应用前景。
3、调试工具:调试工具可以帮助设计人员找出设计和实现中的错误。JTAG 是一种常用的调试工具,它可以用来调试硬件设计和软件代码。
4、集成开发环境(IDE):提供一个集成的开发环境,可以使得设计人员更 容易地进行设计和调试。该环境应包括编辑器、编译器、仿真器和调试器等工具。
simulink仿真流程

simulink仿真流程标题,深入了解Simulink仿真流程。
Simulink是一种用于建模、仿真和分析动态系统的工具,它可以帮助工程师们更好地理解和设计复杂的控制系统。
在本文中,我们将深入探讨Simulink的仿真流程,以帮助读者更好地了解如何使用Simulink进行系统仿真。
Simulink仿真流程可以分为以下几个步骤:1. 模型建立,首先,我们需要在Simulink中建立系统的模型。
这可以通过拖放各种组件来实现,包括传感器、执行器、控制器等。
这些组件可以通过连接线连接起来,以构建系统的整体模型。
2. 参数设置,在建立模型后,我们需要设置各个组件的参数,包括传感器的灵敏度、执行器的动态响应等。
这些参数设置将直接影响系统的仿真结果。
3. 信号输入,接下来,我们需要确定系统的输入信号,这可以是一个预先定义的信号,也可以是一个外部输入。
这些输入信号将作为系统的激励,驱动系统进行仿真。
4. 仿真运行,一切就绪后,我们可以开始运行仿真。
Simulink将根据模型和参数设置,以及输入信号,模拟系统的动态行为,并输出相应的仿真结果。
5. 结果分析,最后,我们需要对仿真结果进行分析。
这包括系统的响应曲线、稳定性分析、频域特性等。
通过对仿真结果的分析,我们可以评估系统的性能,并进行必要的调整和优化。
总的来说,Simulink的仿真流程涉及模型建立、参数设置、信号输入、仿真运行和结果分析等多个环节。
通过深入了解Simulink的仿真流程,我们可以更好地利用这一工具来进行系统建模和分析,从而更好地理解和设计复杂的控制系统。
Simulink仿真教程
图9-23 子系统模块复制到模型窗
图9.24 原始子系统模块的内部结构型窗
仿真技术
第九章 Simulink动态仿真
PID控制器子系统创建过程: ③ 将组成子系统的模块填加到子系统编辑窗口: ④ 将模块按设计要求连接:
仿真技术
第九章 Simulink动态仿真
PID控制器子系统创建过程: ⑤ 设置子系统各模块参数(可以是变量);修改 in1 和 out1 模块 下面的标签; ⑥ 关闭子系统的编辑窗口,返回模型窗口,修改子系统的标签 (PID),该PID子系统即可作为模块在构造系统模型时使用。
9.3 子系统创建与封装
9.3.2 子系统的封装
子系统可以建立自己的参数设置对话框,以避免对子 系统内的每个模块分别进行参数设置,因此在子系统 建立好以后,需对其进行封装。子系统封装的基本步 骤如下: ① 设置好子系统中各模块的参数变量; ② 定义提示对话框及其特性; ③ 定义被封装子系统的描述和帮助文档; ④ 定义产生模块图标的命令。
仿真技术
第九章 Simulink动态仿真
9.3 子系统创建与封装
9.3.1 子系统的创建 1. 通过子系统模块来建立子系统 在Simulink库浏览器,有一个子系统(Subsystems)的库模 块(有的版本在Signals & Systems子库里),点击该图标即 可看到不同类型的子系统模块。
9.3 子系统创建与封装
9.3.1 子系统的创建 2. 组合已存在的模块来建立子系统
如果现有的模型已经包含了需要转化成子系统的模块,就可以 通过组合这些模块的方式建立子系统。步骤如下:
① 确定需建立Subsystem的模型(被选中的均标记有黑块)
第4章 SIMULINK仿真
• (9)Signal Attributes(信号属性模块库)和Signal Attributes(信号属性模块库) Routing(信号路由模块库) Routing(信号路由模块库)
• • • • • • • • • • • • • • • 这两个模块库主要是由描述信号系统的模块构成,其中主要模块有: Data Type Conversion (数据类型转换器) IC(初始状态); Probe(探测器); Width(带宽); Bus Creator(总线生成器); Bus Selector(总线选择器); Data Store Memory(数据记忆存储); Data Store Read(数据读存储); Data Store Write(数据写存储); From(导入); Goto(传出); Goto Tag Visibility(传出标记符可视性); Multiport Switch (多路选择开关); Mux(混合)
• (7)Model Verification(模型辨识模块库)和ModelVerification(模型辨识模块库) ModelUtilities(扩展模型模块库) Wide Utilities(扩展模型模块库) • 这两个模块库由描述模型辨识的和扩展模型模块构成,其 中主要模块有: • Assertion(确认); • Check Discrete Gradient(检查离散梯度); • Check Dynamic Range(检查动态系统范围); • Check Dynamic Lower Bound(检查动态系统低段范围) • Check Static Range(检查静态系统范围); • Check Input Resolution (检查输入分辨率); • DocBlock(模块注释文本); • Model Info(模型信息); • Timed-Based Linearization(基于时间的线性化模型)
simulink建模与仿真流程
simulink建模与仿真流程我们需要在Simulink中创建一个新的模型。
打开Simulink软件后,选择“File”菜单中的“New”选项,然后选择“Model”来创建一个新的模型。
接着,我们可以在模型中添加各种组件,如信号源、传感器、执行器等,以及各种数学运算、逻辑运算和控制算法等。
在建模过程中,我们需要定义模型的输入和输出。
在Simulink中,可以使用信号源模块来定义模型的输入信号,如阶跃信号、正弦信号等。
而模型的输出信号可以通过添加显示模块来实现,如示波器模块、作用域模块等。
接下来,我们需要配置模型的参数。
在Simulink中,可以通过双击组件来打开其参数设置对话框,然后根据需求进行参数配置。
例如,对于控制系统模型,我们可以设置控制器的增益、采样时间等参数。
完成模型的配置后,我们可以进行仿真运行。
在Simulink中,可以选择“Simulation”菜单中的“Run”选项来运行仿真。
在仿真过程中,Simulink会根据模型的输入和参数进行计算,并生成相应的输出结果。
我们可以通过示波器模块来实时显示模型的输出信号,以便进行结果分析和调试。
在仿真过程中,我们可以通过修改模型的参数来进行参数调优。
例如,可以改变控制器的增益值,然后重新运行仿真,观察输出结果的变化。
通过不断调整参数,我们可以优化模型的性能,使其达到设计要求。
除了单一模型的仿真,Simulink还支持多模型的联合仿真。
通过将多个模型进行连接,可以实现系统级的仿真。
例如,我们可以将控制系统模型和物理系统模型进行连接,以实现对整个控制系统的仿真。
在仿真完成后,我们可以对仿真结果进行分析和评估。
Simulink提供了丰富的分析工具,如频谱分析、时域分析和稳定性分析等。
通过对仿真结果的分析,我们可以评估模型的性能,并进行进一步的改进和优化。
Simulink建模与仿真流程包括创建模型、添加组件、定义输入输出、配置参数、运行仿真、参数调优、联合仿真和结果分析等步骤。
Simulink仿真举例说明
附录四Simulink仿真举例说明Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
Simulink包括连续与离散模块、各种工具模块、信源信宿模块以及通信模块库中各种信源与信道编码等内容。
通过Simulink提供的丰富的功能块,用户可以迅速地创建系统的模型,不需要书写一行代码,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。
以下用实例来说明Simulink在通信系统设计中建模和仿真应用,使刚开始接触Simulink的读者能够对其有更为形象的了解。
1.启动MATLAB,进入MATLAB主界面如图1所示。
Similink库浏览器图1 MA TLAB主界面2.点击MATLAB 主界面工具栏上的“”按钮,会弹出Simulink的库浏览器如图2 所示。
“File”菜单图2 Simulink 的库浏览器3. 在Simulink Browser 的界面下,选择“File ”菜单下“New ”中的“Model ”选项,弹出如图3所示的模型窗口,此时就可以在Simulink Browser 界面中选择不同的模块来建立自己的模型。
图3Simulink 的模型窗口4. Simulink 建模举例说明。
● 建立新模型如图3所示。
●向模型中添加模块。
在Simulink Browser 窗口中,如图4所示,依次选择 ① Simulink ,② Source 库,③ Signal Generator 模块(信号发生器),然后将其拖到如图3所示的模型窗口中。
图4模块的选择方法3用同样的方法可添加其它所需的模块,添加完各个模块后,模型窗口如图5所示。
图5 添加了各个模块后的模型窗口本实验中要用到的模块还有:Simulink / Source库下的Constant模块(常数模块);Simulink /Math Operations库下的Product模块(乘法器模块);Simulink / Discrete库下的Zero-Order Hold模块(抽样器模块);Simulink / Sink库下的Scope 模块(示波器模块);DSP Blockset / DSP Sinks库下的Spectrum Scope模块(频谱示波器模块);图6 连接两个模块连接各个模块。