2017大学生电子设计竞赛I题可见光室内定位装置
2018年TI杯大学生电子设计竞赛题
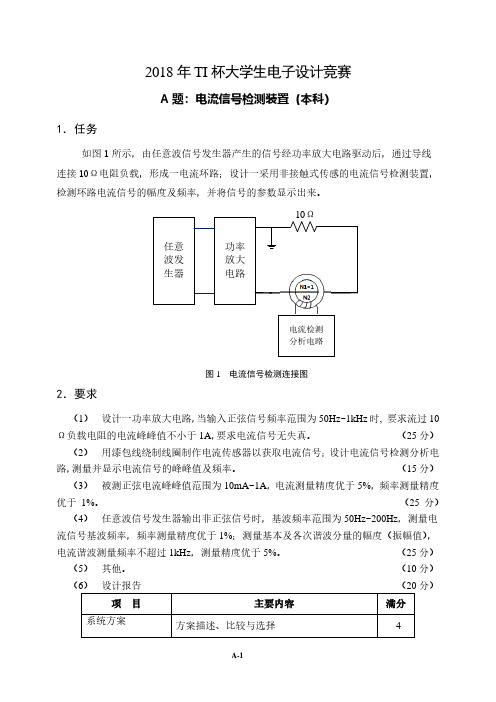
2018年TI杯大学生电子设计竞赛A题:电流信号检测装置(本科)1.任务如图1所示,由任意波信号发生器产生的信号经功率放大电路驱动后,通过导线连接10Ω电阻负载,形成一电流环路;设计一采用非接触式传感的电流信号检测装置,检测环路电流信号的幅度及频率,并将信号的参数显示出来。
图1 电流信号检测连接图2.要求(1)设计一功率放大电路,当输入正弦信号频率范围为50Hz~1kHz时, 要求流过10Ω负载电阻的电流峰峰值不小于1A,要求电流信号无失真。
(25分)(2)用漆包线绕制线圈制作电流传感器以获取电流信号;设计电流信号检测分析电路,测量并显示电流信号的峰峰值及频率。
(15分)(3)被测正弦电流峰峰值范围为10mA~1A,电流测量精度优于5%,频率测量精度优于1%。
(25分)(4)任意波信号发生器输出非正弦信号时,基波频率范围为50Hz~200Hz,测量电流信号基波频率,频率测量精度优于1%;测量基本及各次谐波分量的幅度(振幅值),电流谐波测量频率不超过1kHz,测量精度优于5%。
(25分)(5)其他。
(10分)(6)设计报告(20分)项目主要内容满分系统方案方案描述、比较与选择 4理论分析与计算电流测量方法谐波分量测量方法5 电路设计电路设计 5测试方案与测试结果测试方案测试结果完整性测试结果分析4设计报告结构及规范性摘要、报告正文结构、公式、图表的完整性和规范性2 总分203.说明(1)为提高电流传感器的灵敏度,可用用漆包线在锰芯磁环上绕制线圈,制作电流传感器。
(2)在锰芯磁环上绕N2匝导线,将流过被测电流的导线从磁环中穿过(N1=1),构成电流传感器。
2018年TI 杯大学生电子设计竞赛B 题:灭火飞行器(本科)1.任务基于四旋翼飞行器设计一个灭火飞行器(简称飞行器)。
飞行器活动区域示意图如图1所示。
在图1中,左下方的圆形区域是飞行器起飞及降落点;右侧正方形区域是灭火防区,防区中有4个用红色LED 模拟的火源(火源用单只0.5W 红色发光二极管来实现,建议LED 电流不超过25mA )。
山东理工大学第七届电子设计竞赛题目精选文档
山东理工大学第七届电子设计竞赛题目精选文档TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-微弱信号检测装置(A题)【专业组】一、任务设计并制作一套微弱信号检测装置,用以检测在强噪声背景下已知频率的微弱正弦波信号的幅度值,并数字显示出该幅度值。
为便于测评比较,统一规定显示峰值。
整个系统的示意图如图1所示。
正弦波信号源可以由函数信号发生器来代替。
噪声源采用给定的标准噪声(wav文件)来产生,通过PC机的音频播放器或MP3播放噪声文件,从音频输出端口获得噪声源,噪声幅度通过调节播放器的音量来进行控制。
图中A、B、C、D和E分别为五个测试端点。
图1 微弱信号检测装置示意图二、要求1. 基本要求(1)噪声源输出VN的均方根电压值固定为1V?0.1V;加法器的输出VC =VS+VN,带宽大于1MHz;纯电阻分压网络的衰减系数不低于100。
(2)微弱信号检测电路的输入阻抗Ri≥1 M?。
(3)当输入正弦波信号VS 的频率为1 kHz、幅度峰峰值在200mV ~ 2V范围内时,检测并显示正弦波信号的幅度值,要求误差不超过5%。
2. 发挥部分(1)当输入正弦波信号VS 的幅度峰峰值在20mV ~ 2V范围内时,检测并显示正弦波信号的幅度值,要求误差不超过5%。
(2)扩展被测信号VS的频率范围,当信号的频率在500Hz ~ 2kHz范围内,检测并显示正弦波信号的幅度值,要求误差不超过5%。
(3)进一步提高检测精度,使检测误差不超过2%。
(4)其它(例如,进一步降低VS 的幅度等)。
三、说明本题必须使用TI 的Launchpad(MSP430小开发板)来完成。
微弱信号检测电路要求采用模拟方法来实现。
常用的微弱信号检测方法有:滤波,锁相放大,取样积分等(仅供参考)。
为便于各个模块的测试,所有测试端点(A~E)应做成跳线连接方式。
检测并显示正弦波信号的幅度值是指输入正弦波信号VS 的幅度(即峰值)。
2019年全国电子设计大赛I题_LED线阵显示装置
2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
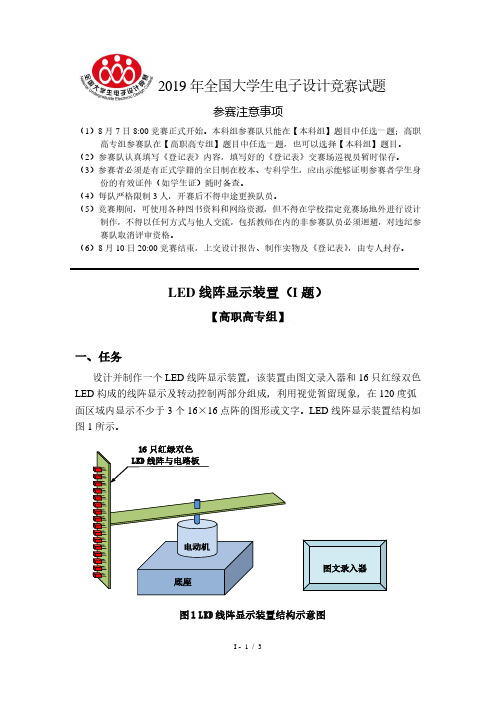
LED 线阵显示装置(I题)【高职高专组】一、任务设计并制作一个LED线阵显示装置,该装置由图文录入器和16只红绿双色LED构成的线阵显示及转动控制两部分组成,利用视觉暂留现象,在120度弧面区域内显示不少于3个16×16点阵的图形或文字。
LED线阵显示装置结构如图1所示。
16只红绿双色LED线阵与电路板电动机图文录入器底座图1 LED线阵显示装置结构示意图二、要求1. 基本要求(1)当电动机转动后,在LED任意指定行上稳定显示两条水平线(单一颜色)。
(2)从LED最上和最下端一行开始,控制两条水平亮线向中间做上下往复运动。
(3)固定显示2个独立全亮的16×16点阵图形,图形间隔为4个点阵点距离。
(4)对(3)要求的显示图形在水平方向上进行宽窄变换循环显示,宽窄变化不小于两个点阵点的距离,变化不少于5次。
2. 发挥部分(1)设计制作具有显示与回放功能的图文录入器,5分钟内录入3张如图2所示格式的图文卡信息,录入方式不限制,按录入顺序回放显示。
(2)将录入的图文信息传输到LED线阵显示装置上,按输入顺序在120度弧面区域内同时显示(每幅图形之间应留3个点阵点的间隔),传输形式不限。
2017大学生电子设计竞赛I题可见光室内定位装置

- 20EB20A0- 20DC202017?年全国大学生电子设计竞赛试题参赛注意事项(1)8?月?9?日?8:00?竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高 职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制?3?人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须回避,对违 纪参赛队取消评审资格。
(6)8?月?12?日?20:00?竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
可见光室内定位装置(I?题)【本科组】一、任务设计并制作可见光室内定位装置,其构成示意图如图?1?所示。
参赛者自行搭建不小于?80cm×80cm×80cm?的立方空间(包含顶部、底部和?3?个侧面)。
顶部平面放置?3?个白光?LED,其位置和角度自行设置,由?LED?控制电路进行控制和驱动;底部平面绘制纵横坐标线(间隔?5cm),并分为?A、B、C、D、E?五个区域,如图?2?所示。
要求在?3?个?LED?正常照明(无明显闪烁)的情况下,测量电路根据传感器检测的信号判定传感器的位置。
LED?控制电路 LED1 LED2 LED3传感器测量电路LCDy(cm)40图?1?可见光室内定位装置示意图 I-1/3-40 图?2?底部平面坐标区域图 40 x(cm)-40二、要求1.基本要求 (1)传感器位于?B、D? 区域,测量电路能正确区分其位于横坐标轴的上、 下区域。
(2)传感器位于?C、E?区域,测量电路能正确区分其位于纵坐标轴的左、 右区域。
可见光室内定位装置的算法设计与实现
s e n s o r ,s i g n a l s we r e c o l l e c t e d i n t h e t i r l t a e r a l p o s i t i o n i n g me t h o d a s he t f o u n d a t i o n ,t o j o i n he t Ha r r i s ,p r o j e c t i o n ma p p i n g ,p o i n t S O rc u e
i u d g me n t a l g o r i t h m a s he t i mp r o v e d a l g o r i t h m,r e a l i z e d he t h i g h p r e c i s i o n o f i n d o o r p o s i t i o n i n g .
Be c a u s e t h e s a t e l l i t e s i g n a l i S v e r y we a k o r e v e n u n a b l e t o o r p o s i t i o n i n g c a n n o t b e r e a l i z e d b y t r a d i t i o n a l t e c h n o l o g y i n d o o r s .
Th e s o f t wa r e d e s i g n a n d r e a l i z a t i o n o f v i s i bl e i n d o o r po s i t i o n i n g De v i c e
Li Yi n g Ya n Zhi ・ - we i Ca i Xi a o— - y u
2014年TI杯大学生电子设计竞赛题(全套)

,可TI公司19mm“探头进。
探头不得再移动。
(30分)(2)将1角硬币更换成直径约25mm的镀镍钢芯1元硬币(第五套人民币1元硬币),重复要求(1)的探测过程。
定位完成后,定位指针与硬币圆心之间的定位误差应控制在5mm以;探测定位速度越快越好,探测定位总时间不应超过2分钟。
完成定位时给出声-光指示,此后探头不得再移动。
(30分)(3)将硬币改为自制圆铁环(用Φ2铁丝绕制),铁环外直径4cm。
重复要求(1)的探测过程,应使定位指针尽可能指向铁环圆心,定位误差应控制在5mm以内;完成定位时给出声-光指示,此后探头不得再移动,探测定位总时间应不超过3分钟。
(30分)(4)其他自主发挥功能。
(10分)(5)3.说明(1)金属物体探测定位装置探头采用AY-LDC1000板(由TI公司提供),可直接用AY-LDC1000板上的覆铜线圈,也可自制线圈;不得安装其他传感与摄像装置。
探测开始后,不得手动或遥控探测器。
(2)玻璃板可采用普通无色玻璃(玻璃边沿需贴上胶带以防划伤),也可用无色透明有机玻璃板;玻璃板长宽尺寸应大于50cm、厚度约3mm。
(3)探头从“探头进入区”一侧进入时探头的起始位置和摆放方向,以及探测区域内的被测金属物体摆放位置均由测试专家在现场指定。
2014年TI杯大学生电子设计竞赛题C题:锁定放大器的设计1.任务设计制作一个用来检测微弱信号的锁定放大器(LIA)。
锁定放大器基本组成框图见图1。
信号通道2.要求(1)外接信号源提供频率为1kHz 的正弦波信号,幅度自定,输入至参考信号R (t )端。
R (t )通过自制电阻分压网络降压接至被测信号S (t )端,S (t )幅度有效值为 10μV ~1mV 。
(5分)(2)参考通道的输出r (t )为方波信号,r (t )的相位相对参考信号R (t )可连续或步进移相180度,步进间距小于10度。
(20分)(3)信号通道的3dB 频带范围为900Hz ~1100Hz 。
2017年学科竞赛获奖统计表
iCAN国际创新创业大赛中国组委会
张淼、郑林林、张拓、白杨、赵昱
马骏驰
30
第十一届iCAN国际创新创业大赛黑龙江赛区决赛
智能无线充电器
省级三等奖
iCAN国际创新创业大赛中国组委会
张秀一、徐静、郑贺文、段程岐、程也
宋宏明
31
第十一届iCAN国际创新创业大赛黑龙江赛区决赛
健康唤醒仪
省级三等奖
iCAN国际创新创业大赛中国组委会
46
中国大学生机械工程创新创意大赛暨GE杯第一届自动化控制设计大赛
Parking Share APP
国家级三等奖
通用电气智能设备(上海)有限公司
施红艺、暴芯兰
宋宏明
47
第一届东北地区大学生光电设计竞赛
创意竞赛组
省级二等奖
东北地区大学生光电设计竞赛组织委员会
全国大学生光电设计竞赛组织委员会
刘畅畅、姜波、夏林辉
全球华人微纳米分子系统学会
崔越、郎莹、胡海月、李中研、任志超
齐凤河
34
第十一届iCAN国际创新创业大赛中国总决赛
多功能车库
国家级优胜奖
iCAN国际创新创业大赛中国组委会
全球华人微纳米分子系统学会
刘寰清、杨硕、梁爽、赵锦、丁肖
齐凤河
35
第十一届iCAN国际创新创业大赛中国总决赛
葵花海田
国家级优胜奖
iCAN国际创新创业大赛中国组委会
智能楼梯攀爬车
国家级优胜奖
iCAN国际创新创业大赛中国组委会
全球华人微纳米分子系统学会
王响、吕阿康、石刚、张金鹏、刘明鑫
吴春梅、李玉春
38
黑龙江省第二届大学生光电设计竞赛
全国电子设计竞赛【B题】无线识别装置-本科
无线识别装置(B题)【本科组】一、任务设计制作一套无线识别装置。
该装置由阅读器、应答器和耦合线圈组成,其方框图参见图1。
阅读器能识别应答器的有无、编码和存储信息。
D图1 无线识别装置方框图装置中阅读器、应答器均具有无线传输功能,频率和调制方式自由选定。
不得使用现有射频识别卡或用于识别的专用芯片。
装置中的耦合线圈为圆形空芯线圈,用直径不大于1mm的漆包线或有绝缘外皮的导线密绕10圈制成。
线圈直径为6.6±0.5 cm(可用直径6.6 cm左右的易拉罐作为骨架,绕好取下,用绝缘胶带固定即可)。
线圈间的介质为空气。
两个耦合线圈最接近部分的间距定义为D。
阅读器、应答器不得使用其他耦合方式。
二、要求1.基本要求(1)应答器采用两节1.5V干电池供电,阅读器用外接单电源供电。
阅读器采用发光二极管显示识别结果,能在D尽可能大的情况下,识别应答器的有无。
识别正确率≥80%,识别时间≤5秒,耦合线圈间距D≥5cm。
(2)应答器增加编码预置功能,可以用开关预置四位二进制编码。
阅读器能正确识别并显示应答器的预置编码。
显示正确率≥80%,响应时间≤5秒,耦合线圈间距D≥5cm。
2.发挥部分(1)应答器所需电源能量全部从耦合线圈获得(通过对耦合到的信号进行整流滤波得到能量),不允许使用电池及内部含有电池的集成电路。
阅读器能正确读出并显示应答器上预置的四位二进制编码。
显示正确率≥80%,响应时间≤5秒,耦合线圈间距D≥5cm。
(2)阅读器采用单电源供电,在识别状态时,电源供给功率≤2W。
在显示编码正确率≥80%、响应时间≤5秒的条件下,尽可能增加耦合线圈间距D。
(3)应答器增加信息存储功能,其存储容量大于等于两个四位二进制数。
装置断电后,应答器存储的信息不丢失。
无线识别装置具有在阅读器端写入、读出应答器存储信息的功能。
(4)其他。
三、说明设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
2017年全国大学生电子设计竞赛 微电网模拟系统(A题)
float Ud,regesister;
ERR[0] = referenceInput-measuredOutput ;
Ui[0]=Ui[1]+ERR[0]*pidCoefficients[1];
Ud=(ERR[0]-ERR[1])*pidCoefficients[2];
regesister= ERR[0]*pidCoefficients[0]
滤波电感采用4股0.5mm的铜线绕制,降低电流密度以减小铜损耗。工作磁通设置到较低的值,减小磁芯的涡流和磁滞损耗。
2
当两台逆变器同时运行时,要求逆变器1和逆变器2能共同向负载输出功率,使负载线电流有效值 达到3A,频率 为50Hz±0.2Hz。即要求通向负载输出恒流,可以不考虑逆变器输出电压。则只需检测电流,通过具体的单片机的控制使输出达到设计要求。
float Get_Adc_Average(u8 ch,u8 times)
{
float temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=Get_Adc(ch);
}
temp_val=(temp_val/times)*(3.3/4096);
return temp_val;
方案一:晶体管三相桥式逆变器
逆变器采用120°导通型的工作方式对换流的安全有利,但晶体管的利用率较低,用于控制120°导通型逆变器的导通角控制电路可采用硬件方式自动产生控制信号;也可采用微处理器的并行接口通过软件方式产生控制信号。
方案二:晶闸管构成的三相桥式逆变器
180°导通型逆变器正常工作的必要条件是可靠的换流,由于逆变器的输入是直流电源,一般晶闸管不能通过控制门极电压将它关断换流,因此必须采用强迫换流的方法。
2017年全国大学生电子设计竞赛试题 设计报告
2017年全国大学生电子设计竞赛试题设计报告四旋翼自主飞行器探测跟踪系统(C题)【本科组】廖聪,吴雨航,张锦华摘要:根据四旋翼飞行器飞行原理,首先根据设计方案采购了飞行器机体模型,选择合适的直流无刷电机作为系统动力装置,选取了功能强大且容易开发的微处理器、传感器和相关电子元器件,并做了大量的系统软硬件调试工作,最终完成了整体设计。
根据系统动力学模型设计控制算法,设计控制系统控制规律,主要包括两个控制回路姿态控制回路、位置控制回路。
在仿真软件平台上,进行控制算法验证及实验研究,优化飞行控制算法参数。
最后,设计实时性高的控制系统软件程序,进行相关实验调试工作,最终设计出能够实现一键飞行探测跟踪的四旋翼自主飞行器。
关键词:ATMEGA2560 瑞萨R5F523T5ADFM MPU6000陀螺仪超声传感器一、系统方案根据设计任务的要求,本系统包括飞行控制模块、驱动模块、飞行导航模块、测距模块等。
1、飞行控制模块的选择飞行控制模块是四旋翼自主飞行器的核心。
按照题目要求,飞行控制模块由ATMEGA2560处理器的开发板专门实现飞行控制算法。
为了实现自主飞行探测跟踪,必须要形成控制的闭环回路,必须要有检测和反馈系统状态的传感器,包括四旋翼的姿态、经纬度、航向、高度、空速、角速率等信号。
目前看来,国内外普遍应用MEMS器件来获取姿态、高度、空速、经纬度等信息。
此外这中间还需要有A/D采样电路、信号调理电路对采集的电信号进行必要的转换和简单的滤波。
针对四旋翼飞行器,控制方法有PID控制、反步法、滑模控制等飞行控制算法,我们采用经典的PID控制算法。
2、驱动模块的选择方案一:采用普通直流电机。
普通直流电机有价格低廉、使用简单等优点,但其扭矩较小,可控性差,此系统要求控制精度高、速度快、且质量要小,所以直流电机一般不能满足要求。
方案二:采用无刷直流电机,其具有响应速度快、较大的启动转矩,从零转速至额定转速具备可提供定转矩的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
y (cm) 40
-40
40 x (cm)
2017 年全国大学生电子设计竞赛试题
参赛注意事项
(1)8 月 9 日 8:00 竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高
职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生
身份的有效证件(如学生证)随时备查。
(4)每队严格限制 3 人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设
计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违 纪参赛队取消评审资格。
(6)8 月 12 日 20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
可见光室内定位装置(I 题)
【本科组】
一、任务
设计并制作可见光室内定位装置,其构成示意图如图 1 所示。
参赛者自 行搭建不小于 80cm×80cm×80cm 的立方空间(包含顶部、底部和 3 个侧面)。
顶部平面放置 3 个白光 LED ,其位置和角度自行设置,由 LED 控制电路进 行控制和驱动;底部平面绘制纵横坐标线(间隔 5cm ),并分为 A 、B 、C 、 D 、E 五个区域,如图 2 所示。
要求在 3 个 LED 正常照明(无明显闪烁)的 情况下,测量电路根据传感器检测的信号判定传感器的位置。
LED 控制电路
LED 1 LED 2 LED 3
传感器
测量电路
LCD
B 20 A
C
- 20
0 20
E
-20
D
图1可见光室内定位装置示意图图2底部平面坐标区域图
I-1/3
-40
二、要求
1.基本要求
(1)传感器位于B、D区域,测量电路能正确区分其位于横坐标轴的上、下区域。
(2)传感器位于C、E区域,测量电路能正确区分其位于纵坐标轴的左、右区域。
(3)传感器位于A区域,测量显示其位置坐标值,绝对误差不大于10cm。
(4)传感器位于B、C、D、E区域,测量显示其位置坐标值,绝对误差不大于10cm。
(5)测量电路LCD显示坐标值,显示分辨率为0.1cm。
2.发挥部分
(1)传感器位于底部平面任意区域,测量显示其位置坐标值,绝对误差不大于3cm。
(2)LED控制电路可由键盘输入阿拉伯数字,在正常照明和定位(误差满足基本要求(3)或(4))的情况下,测量电路能接收并显示3个LED发
送的数字信息。
(3)LED控制电路外接3路音频信号源,在正常照明和定位的情况下,测量电路能从3个LED发送的语音信号中,选择任意一路进行播放,且
接收的语音信号均无明显失真。
(4)LED控制电路采用+12V单电源供电,供电功率不大于5W。
(5)其他。
三、说明
1.LED控制电路和测量电路相互独立。
2.顶部平面不可放置摄像头等传感器件。
3.传感器部件体积不大于5cm×5cm×3cm,用“┼”表示检测中心位置。
4.信号发生器或MP3的信号可作为音频信号源。
5.在LED控制电路的3个音频输入端、测量电路的扬声器输入端和供电电
路端预留测试端口。
6.位置绝对误差:e=(x-x0)2+(y-y0)2
式中x、y为测得坐标值,x0、y0为实际坐标值。
7.每次位置测量开始后,要求5s内将测得的坐标值锁定显示。
8.测试环境:关闭照明灯,打开窗帘,自然采光,避免阳光直射。
I-2/3
四、评分标准
I-3/3。