合导航第九讲机载SAR运动补偿
机载SAR成像对瞄准线运动补偿的要求_曹福祥

第17卷 第2期 1999年6月飞 行 力 学F LI GHT D YN A M ICS V o l.17 N o.2June 1999 1998-09-24收到初稿,1999-01-13收到修改稿。
机载SAR 成像对瞄准线运动补偿的要求曹福祥 袁建平(西北工业大学,西安,710072) 摘 要 飞机偏离匀速直线运动的运动误差是机载合成孔径雷达(Synthetic A pertur e R adar ,SAR )成像的基本困难之一。
通过详细的理论推导,给出了当飞机沿瞄准线方向(即雷达天线相位中心至目标视线)同时存在恒定速度误差、恒定加速度误差和正弦摆动速度误差时,以回波信号压缩波形的主瓣偏移、二次相位误差、三次相位误差以及积分旁瓣比等SA R 系统图像质量指标的最大允许值表示的机载正侧视SA R 运动补偿定量要求的解析式。
并结合一例子进行了计算分析,所得结论可供有关人员参考。
关键词 合成孔径雷达 运动补偿 定量分析引言SAR 是以“合成孔径”原理和脉冲压缩技术为理论基础,以高速数字(光学)处理和精确运动补偿为前提条件的高分辨率成像雷达。
在介绍合成孔径雷达的概念及原理时,通常总假设雷达载机作匀速直线运动,也就是说在合成孔径成像时间内,载机所受的合力为零。
事实上由于设备性能、驾驶技术、大气湍流以及军用任务所要求的机动性的影响,从飞行力学的角度分析,载机沿航向和瞄准线方向都可能存在不希望的力的作用,即会偏离理想的匀速直线平移运动。
这将对SAR 的工作产生不可忽视的影响,严重时甚至不能成像[1,2]。
在合成孔径时间内,载机在瞄准线方向的平移运动误差可等效为以下几种基本类型:恒定的速度误差、匀加速度运动以及正弦变化速度误差。
文献[1]对于瞄准线方向单独存在上述三种误差之一时给出了正侧视带状SAR 对运动误差的定量要求。
但实际上在合成孔径时间内,沿瞄准线方向可能同时存在任意两种误差,也有可能是三种误差同时存在。
机载超宽带SAR运动补偿方法

机载超宽带SAR运动补偿方法安道祥;黄晓涛;李欣;周智敏;齐星【期刊名称】《信号处理》【年(卷),期】2011(27)1【摘要】基于机载合成孔径雷达(SAR)正弦运动误差模型,本文了研究了机载超宽带SAR运动补偿方法.首先,本文从理论上解释了传统"两步运动补偿法"原理,并分析了"两步运动补偿法"的优势与不足.其次,基于分析结果,文中提出一种"两步运动补偿法"的改进处理流程,称为"单步运动补偿法".在"单步运动补偿法"中,用于补偿距离空变相位误差的"二阶补偿"由在距离弯曲校正(RCMC)后的回波域内进行改为在RCMC前的回波域内进行.与原始"两步运动补偿法"相比,"单步运动补偿法"具有更好的高频运动误差补偿性能.文中详细推导了所提运动补偿方法,并通过仿真实验证明了该方法的有效性.%Based on the sinusoidal motion error model of airborne synthetic aperture radar ( SAR) , the motion compensation( MoCo) methods for airborne ultrawide band ( UWB SAR) are studied. First, we explain the rationale of the two-step MoCo strategy.And an analysis of the advantage and disadvantage of this MoCo strategy is carried out. Based on the analysis results , an extended twostep MoCo strategy with modified implementation flow is proposed, which is called the one-step MoCo strategy. In one-step MoCo strategy, the second-order MoCo used for compensating the range-variant phase error is implemented before the range cell migration correction ( RCMC) processing, instead of after the RCMC processing. As compared to thetraditional two-step MoCo strategy, the one-step MoCo strategy has better performance on compensating the high frequency motion error. This paper deducts the proposed MoCo method in detail, and proves its validity with simulation experiment.【总页数】8页(P73-80)【作者】安道祥;黄晓涛;李欣;周智敏;齐星【作者单位】国防科学技术大学电子科学与工程学院,湖南长沙,410073;国防科学技术大学电子科学与工程学院,湖南长沙,410073;国防科学技术大学电子科学与工程学院,湖南长沙,410073;国防科学技术大学电子科学与工程学院,湖南长沙,410073;贵州省贵航无人机有限责任公司,贵州安顺,561000【正文语种】中文【中图分类】TN958.7【相关文献】1.一种适用于机载双站SAR成像的运动补偿方法 [J], 周松;杨磊;李亚超;邢孟道;保铮2.基于数据的超宽带SAR的运动补偿方法 [J], 王建;王亮;薛国义;周智敏3.基于SPGA算法的低频超宽带SAR运动补偿方法 [J], 安道祥;王亮;黄晓涛;周智敏4.无人机载高分辨条带SAR运动补偿方法 [J], 范波; 姜志杰; 陈力; 李洪钧; 何焱5.考虑运动补偿的机载SAR定位误差传递模型及航迹标定方法 [J], 高铭;仇晓兰;孟大地;黄丽佳;丁赤飚因版权原因,仅展示原文概要,查看原文内容请购买。
基于GPS_IMU组合导航的机载SAR运动补偿方案的误差分析及仿真验证
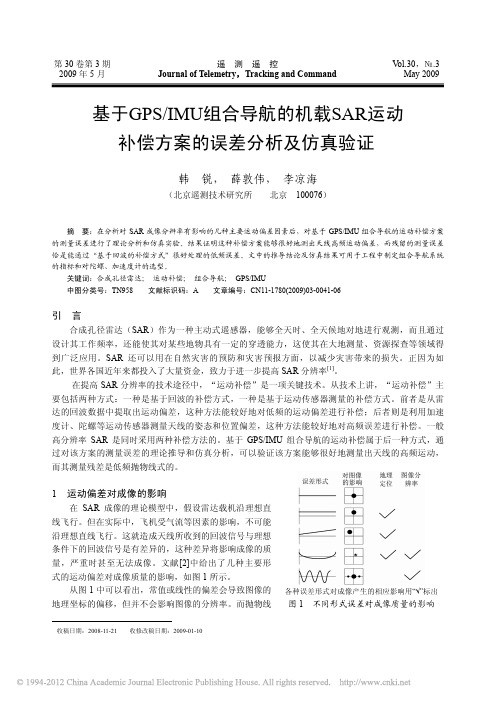
·41·2009年5月遥测遥控基于GPS/IMU组合导航的机载SAR运动补偿方案的误差分析及仿真验证韩锐,薛敦伟,李凉海(北京遥测技术研究所北京 100076)摘要:在分析对SAR成像分辨率有影响的几种主要运动偏差因素后,对基于GPS/IMU组合导航的运动补偿方案的测量误差进行了理论分析和仿真实验。
结果证明这种补偿方案能够很好地测出天线高频运动偏差,而残留的测量误差恰是能通过“基于回波的补偿方式”很好处理的低频误差。
文中的推导结论及仿真结果可用于工程中制定组合导航系统的指标和对陀螺、加速度计的选型。
关键词:合成孔径雷达;运动补偿;组合导航; GPS/IMU中图分类号:TN958 文献标识码:A 文章编号:CN11-1780(2009)03-0041-06引言合成孔径雷达(SAR)作为一种主动式遥感器,能够全天时、全天候地对地进行观测,而且通过设计其工作频率,还能使其对某些地物具有一定的穿透能力,这使其在大地测量、资源探查等领域得到广泛应用。
SAR还可以用在自然灾害的预防和灾害预报方面,以减少灾害带来的损失。
正因为如此,世界各国近年来都投入了大量资金,致力于进一步提高SAR分辨率[1]。
在提高SAR分辨率的技术途径中,“运动补偿”是一项关键技术。
从技术上讲,“运动补偿”主要包括两种方式:一种是基于回波的补偿方式,一种是基于运动传感器测量的补偿方式。
前者是从雷达的回波数据中提取出运动偏差,这种方法能较好地对低频的运动偏差进行补偿;后者则是利用加速度计、陀螺等运动传感器测量天线的姿态和位置偏差,这种方法能较好地对高频误差进行补偿。
一般高分辨率SAR是同时采用两种补偿方法的。
基于GPS/IMU组合导航的运动补偿属于后一种方式,通过对该方案的测量误差的理论推导和仿真分析,可以验证该方案能够很好地测量出天线的高频运动,而其测量残差是低频抛物线式的。
1 运动偏差对成像的影响在SAR成像的理论模型中,假设雷达载机沿理想直线飞行。
机载超高分辨SAR运动补偿成像技术研究

机载超高分辨SAR运动补偿成像技术研究机载超高分辨SAR运动补偿成像技术研究摘要:合成孔径雷达(Synthetic Aperture Radar, SAR)成像是一种重要的遥感技术,广泛应用于地球观测、环境监测、军事侦察等领域。
然而,对于机载SAR系统而言,平台运动会带来影响成像质量的杂散回波信号。
为了克服这一问题,研究人员引入了机载超高分辨SAR运动补偿成像技术。
本文主要介绍了该技术的研究现状、原理以及应用前景。
关键词:合成孔径雷达(SAR)、机载、超高分辨、运动补偿、成像技术1. 引言合成孔径雷达(Synthetic Aperture Radar, SAR)技术以其独特的能力在地球观测、环境监测和军事侦察等领域发挥了重要作用。
机载SAR系统通过设置在航天器上的传感器,可以获取更高分辨率和更广覆盖范围的图像,从而提高了目标探测与识别的能力。
然而,由于飞机、卫星等载具本身的运动,机载SAR系统在成像过程中会受到杂散回波的影响,导致成像质量下降。
因此,研究高效的运动补偿技术对于机载SAR系统具有重要意义。
2. 运动补偿技术的分类与研究现状机载SAR运动补偿技术可以分为两大类:时域运动补偿和频域运动补偿。
时域运动补偿主要通过解算运动参数,利用运动补偿算法对原始数据进行相位调整,从而实现运动补偿。
常用的时域运动补偿算法包括多普勒参数估计、多普勒频率补偿和多普勒调整等。
频域运动补偿则是通过对原始数据进行图像域运动补偿,主要包括基于椭圆积分的运动补偿方法、采用坐标变换进行处理的方法等。
时域运动补偿算法中,多普勒参数估计是关键一步。
通常,可以采用相位解缠或功率谱估计方法来估计多普勒频移参数。
对于高速移动目标或高加速度情况,经典的多普勒参数估计算法存在精度不高、鲁棒性差等问题。
因此,研究人员提出了一系列改进算法,例如基于像素层次和路径排序的多普勒参数估计算法,以提高运动补偿的性能。
频域运动补偿方法相对于时域方法有着更好的性能。
机载高分辨聚束SAR成像及运动补偿算法研究
机载高分辨聚束SAR成像及运动补偿算法研究机载高分辨聚束SAR成像及运动补偿算法研究近年来,合成孔径雷达(Synthetic Aperture Radar,简称SAR)技术在航空航天领域得到广泛应用,成为了遥感领域的主要测量手段之一。
机载高分辨聚束SAR成像及运动补偿算法的研究就是为了提高SAR成像质量,提供更精确的地物信息。
机载高分辨聚束SAR成像技术通过使用类似于光学摄影中的聚束技术,将飞机上的雷达信号进行集中,提高了成像分辨率。
而运动补偿算法则是解决机载SAR影像中由于平台运动引起的位置不稳定问题的关键。
首先,机载高分辨聚束SAR成像技术的关键在于采集和处理大量的雷达信号数据。
雷达接收到的信号经过时频的二维变换后,进入图像处理部分。
在图像处理过程中,利用多通道合成孔径雷达技术,将各个通道的信号进行叠加,提高了信噪比和成像分辨率。
同时,利用成像算法对雷达信号进行合成孔径成像,可以获得地物的高分辨率影像。
其次,运动补偿算法是机载高分辨聚束SAR成像过程中的重要环节。
在飞机飞行过程中,平台的运动会导致成像位置的不稳定。
因此,需要对原始数据进行运动补偿,以获得稳定的成像结果。
一种常用的运动补偿算法是距离-Doppler(DD)算法。
该算法通过利用平台运动的信息,对接收到的雷达信号进行校正,消除运动造成的位置偏移,从而实现对地物的精确成像。
机载高分辨聚束SAR成像及运动补偿算法研究面临着许多挑战。
首先,由于机载SAR系统在高速飞行中的振动和加速度变化,使得成像过程相对复杂。
因此,需要对平台运动进行精确建模,以实现准确的运动补偿。
其次,由于地物表面的复杂性,如建筑物、山脉和海洋等,会对雷达信号产生多次散射,并引起多次反射。
因此,在成像过程中需要考虑高度复杂矢量场的因素,以提高成像的准确性和稳定性。
为了解决以上问题,研究人员提出了一系列改进的机载高分辨聚束SAR成像及运动补偿算法。
其中,自适应滤波算法是一种常用的成像算法,通过对雷达信号进行滤波处理,消除干扰和噪声,提高成像质量。
应用于机载SAR运动补偿的SINS/GPS组合导航系统设计

CHEN Yu ln , I He pn L in xo g -o g一 L — ig , IJa —in (. s t e o Eet n sC iee A ae y o Si csB in 0 10 C ia2G aut U i ri ,hns cd— 1 ntu f l r i ,hn s cd m f c n e, e i 10 9 ,hn ;.r ae nv sy C i eA ae I it co c e jg d e t e m fS i csB in 00 9 C ia y o c ne ,e ig 10 3 ,hn ) e j
摘 要 :针 对机 栽S , 动 补 偿 的 需 求 .以DS AP. 运 P为 处理 器设 计 了一 套 SNS GP 组 合 导 航 系 I / S
统 。使 用 强 跟 踪 卡 尔曼 滤 波 算 法 估 计 系统 误 差 , 用 闭 环 校 正 法进 行 修 正 . 利 实现 了SNS I /
( S : l n f tr GP ) Kama l i e
合 成孑 径 雷达 S L AR作 为一种 微 波成 像 系统 , 具
有全天时、 全天 候 成像 能力 , 够 提 供远 距 离 、 面 能 大
此需 要对 机 载 S AR进 行运 动补偿 I]运 动补偿 主要 1。 _ 3 有 两种 方式 : 于运 动传 感 器 的运 动 补偿 和基 于 回 基
Байду номын сангаас
G S 数 据 融 合 。通 过Ma a仿 真 和 跑 车 实验 验证 了系统 设 计 的 可 行 性 和 有 效性 。该 系统 P的 tb l
具 有 低 成 本 、 时性 和 同 步 于S 实 AR雷 达P 信 号 的优 点 。 RF
运动补偿对机载SAR重轨干涉成像的影响分析

运动补偿对机载SAR重轨干涉成像的影响分析
运动补偿对机载SAR重轨干涉成像的影响分析
方东生1,吕孝雷1,李缘廷2,李芳芳1,钱江3
【摘要】摘要:机载重轨干涉成像时,两轨数据需要选择平行的参考轨迹,以便保证补偿之后基线的稳定性。
由于实际飞行轨迹与参考轨迹之间存在运动偏移,需要进行运动补偿。
区别于机载SAR单轨运动补偿,选择平行的参考轨迹往往需要搬移较大的角度。
为了定量分析基于搬移的运动补偿引入的残余误差对干涉成像的影响,建立了基于搬移的SAR成像模型,将搬移导致的影响等效为斜视角模型和斜距残余误差。
随后推导了由“搬移”引入的残余误差对成像的影响,以及引入的相位误差对重轨干涉的影响,并通过仿真验证了理论推导的正确性。
分析结果为机载重轨干涉对平台飞行控制要求提供了一种分析手段。
【期刊名称】雷达科学与技术
【年(卷),期】2016(014)004
【总页数】9
【关键词】关键词:机载重轨干涉;运动补偿;参考航迹;残余误差
0 引言
机载重轨干涉SAR具有非常高的分辨率和良好的机动性,可以根据地物观测的需要灵活地选择波段和飞行平台,重轨干涉能满足L、P等较长波段对基线的要求,在局部地区的地形测绘[1-4]、形变监测[5-6]上具有非常重要的意义。
然而机载系统由于平台易受气流干扰,实际运动轨迹往往偏离预定理想轨迹,无法保证稳定的基线要求,这为实现高精度的重轨干涉测量提出了严峻的挑战。
相对于常规的单航过机载SAR成像,重轨干涉SAR的成像为保证基线的稳定,两次航过的成像需要选择相互平行的参考轨迹进行成像。
机载平台易受气流的影。
一种新的机载条带式SAR沿航向运动补偿方法

一种新的机载条带式SAR 沿航向运动补偿方法黄源宝,保 铮,周 峰(西安电子科技大学雷达信号处理重点实验室,陕西西安710071)摘 要: 提出了一种新的机载条带式SAR 沿航向运动误差的补偿方法.它不用插值,所以节省了运算量、避免了插值带来的图像质量下降,因而对机载SAR 系统的实时成像有好的应用前景.理论分析、仿真和实测数据成像证明了该方法的正确性和有效性.关键词: 合成孔径雷达;条带式;运动补偿中图分类号: TN957 文献标识码: A 文章编号: 0372-2112(2005)03-0459-04A Novel Method for Along -Track Motion Compensation of theAirborne Strip -Map SARHUANG Yuan -bao,B AO Zheng,Z HOU Feng(Ke y Laborato ry for Radar Si gnal Processing ,Xidian U nive rsity ,Xi .an,Shaanxi 710071,China)Abstract: A method for along -track motion compensation of the airborne strip -map SAR(Synthetic Aperture Radar)i s present -ed.No complex interpolation is involved i n this algorithm,hence the high computational efficiency and the improved image quali ty are achieved.Theoretical analysis,simulation results and the real data images show that it is of great value in rea-l time imaging.Key words: SAR;strip -map;motion compensation1 引言条带式S AR 成像算法是基于载机作匀速直线飞行,但实际上载机运动由于气流和载机自身等原因会偏离理想的航线,如图1所示.图中P 点为平面XOY 中的一点,载机理想航线在XOZ 平面内且与X 轴平行,R 为天线相位中心距目标点的瞬时距离R 0,为理想航线距目标点的最近距离.文献[1~3]等对运动误差的影响进行了大量的分析,指出成出高质量雷达图像的关键是精确地测量实际航线并补偿它和理想航线间的差别.运动测量主要采用惯性导航系统(INS)、惯性测量单元(IMU)和全球定位系统(GPS)等组成的运动测量系统[4],但在测量精度不够高时或在没有装备测量系统的低成本SAR 系统中也可利用雷达回波数据估计运动参数[5~8].得到运动参数后,补偿方法也非常重要,特别是对于条带式SAR,它的场景较大,仅对场景中心点进行补偿是不行的,必须考虑运动误差对不同目标点的影响的差异.为了使补偿可以进行,一定的近似是必需的.根据图1中几何关系,可得运动误差所造成的瞬时斜距误差为[9,10]$R(t)U $x (t)V t -X 0R 0-$Y(t)sin ;+$z (t)cos ;(1)式中V 为载机在理想航线上的理想速度,t 为时间且规定当X =0时t =0,$X (t),$Y(t )和$Z(t)为雷达相位中心在三个坐标上的瞬时位置误差.式(1)对雷达方位向波束宽度采取了窄波束近似,使得由$Y(t)与$Z(t)而产生的瞬时斜距误差与目标点的方位向位置无关.对于波束很宽的情况(如低波段超宽带雷达)须另想办法[11].本文仅考虑满足式(1)的情况.从式(1)可以看出,其第一项由沿理想航线的误差产生,它与目标点在平面XOY 上的二维位置有关,不仅距离向位置不同的点不能同时补偿,而且方位向位置不同的点也不能同时补偿;第二、三项由偏离理想航线的误差产生,它们只与目标点的距离向位置有关(即与;有关),可在距离压缩后按距离单元各次回波分别补偿.因此运动误差可分为沿雷达视线方向的误差和沿载机理想航线方向的误差两个部分,且成像质量对沿理想航线的速度误差非常敏感[10].沿雷达视线方向的补偿表现为与距离有关的相位补偿和包络移动,其中包络移动通过插值来完成,但对条带式SAR ,载机在合成孔径时间这一短时间内,位置误差一般不超出一个距离分辨单元,可以只补偿相位而不补偿包络.沿理想航线运动误差的影响也可以分收稿日期:2004-03-22;修回日期:2004-11-25基金项目:国防预研项目(No.413070502);微波成像重点实验室基金(No.51442010301D Z01)第3期2005年3月电 子 学 报ACTA ELECTRONICA SINICA Vol.33 No.3M ar. 2005为对包络的影响和对相位的影响两个方面,可以利用运动测量系统的测量值足够精确地实时调节雷达重复频率或事后离线对回波数据在慢时间进行插值使雷达在合成孔径上的空间采样间隔成为均匀的,这样两种误差就同时得到了补偿.实时调节雷达重复频率对硬件要求高,插值运算量大并且使图像质量下降,所以本文提出一种不用插值的沿理想航线运动误差的补偿方法.实际上沿理想航线运动误差造成的包络误差和相位误差对补偿精度的要求是不一样的,可以分别用不同方法补偿.沿理想航线运动误差短时间内可视为恒定的速度误差,所以包络误差和距离徙动可以合并在一起当成新的距离徙动分子孔径进行校正,这样在每一个子孔径内距离徙动校正除了速度取值不同外和不存在误差时没什么两样.包络误差和距离徙动结合在一起得到校正后就可以只考虑信号的相位.当飞机匀速直线飞行且雷达重复周期固定时,所得到的某一目标点回波的多普勒相位历程可看成是来自一个线性调频信号.固定的瞬时多普勒调频率对应着固定的空间采样间隔.但当飞机作非匀速直线飞行时,瞬时多普勒调频率不再为固定值.我们可在一定条件下近似地认为瞬时多普勒调频率只与瞬时速度有关,从而用瞬时速度构造一补偿函数补偿瞬时多普勒调频率的变化,这也就是等效地补偿了沿理想航向速度的波动分量.这种运动补偿方法最初是从实践中总结出来的经验方法[12],在实际应用中取得了良好效果.本文对它的机理进行了理论解释并且确定了其适用范围,将它作为一种有理论基础的方法正式提出.理论分析和仿真试验都证明本方法对即使横向分辨要求为1m的情况也是适用的,并且大量的实测数据处理表明它能够满足目前国内所录取的SAR 数据沿航线速度误差补偿处理的要求.我们将在第三节给出分辨率为1m@1m实测的直升机载条带式SAR数据处理结果,该试验利用基于数据的多普勒中心和调频率估计方法,对运动参数的变化历程作了长时间的精确估计,并将速度补偿和成像算法有机结合在一起,在飞行状态不很理想时,仍获得了好的宽幅图像.我们认为本文方法对运动测量系统测量精度不够高或没有装备测量系统的低成本机载SAR系统的实时成像系统有很好的应用前景.2沿理想航线运动误差的补偿方法雷达采集信号的模型如图1所示.假设沿雷达视线方向的运动误差已经得到了补偿,认为载机沿理想航线飞行,只是由于速度有波动而空间采样不均匀,并且速度波动引起的包络误差和距离徙动也已经分子孔径得到了补偿,所以现在只考虑点P回波的多普勒相位历程,可写为5(X)=-4P K(X-X0)2+R20U-2PK R0(X-X0)2,X0-L2[X[X0+L2(2)式中K是雷达载波波长,L是雷达合成孔径长度,并且因为不影响分析,式中略去了常数相位.式(2)是以天线位置X为自变量的空域信号,事实上我们得到的数据是一个时域信号,横向压缩也是在时域进行的.若定义位置坐标原点也为时间坐标原点,位置坐标正向也为时间坐标正向,则有以下关系X(t)=Q t0v(s)ds=Vt+Q t0$v(s)ds(3)式中v(t)为载机飞行瞬时速度(实际中需要测量或基于数据的估计),V是飞机在整个成像处理区间的理想速度(可取为平均速度),$v(t)是速度的波动量.将式(3)代入式(2),可求得瞬时多普勒调频率为k d(t)=12Pd25[X(t)]dt2=K+$k d(t)+D k d(t)(4)式中K=-2V2K R0$k d(t)=-2K R[2V$v(t)+$v2(t)]=-2K R0[v2(t)-V2]D k d(t)=-2K RQ t t$v(t)dt+Vt d$v(t)dt=-2K Rv c(t)[X(t)-X0]其中t0为飞机到达点X0的时刻,即有X0=X(t0).K为平均速度对应的多普勒调频率,是我们想保留的部分.$k d(t)和D k d(t)是速度波动的影响,它们随时间变化,因而破坏了时域信号的方位向平移不变性,使得我们无法对同一距离单元但方位向位置不同的多个目标在频域同时进行压缩.但这两项的性质是不同的,$k d(t)只与瞬时速度有关,是可补偿项;D k d(t)与目标点的方位向位置有关,方位向位置不同的目标点不可以统一补偿,但在一定条件下它的影响可忽略,可忽略的条件为L[[(3K R0V2)/a max]1/3(5)式中a max为加速度最大值.式(5)的证明见附录.式(4)忽略D k d(t)后变为k d(t)U K+$k d(t)(6)这就是说速度波动引起的瞬时调频率的波动中$k d(t)起主要作用.利用式(6),式(3)又可在时域表示为瞬时调频率的二次积分形式5[X(t)]=2P Q t t0Q s t0k d(u)duds=P K(t-t0)2+2P Q t t0Q s t0$k d(u)duds(7)式中的两个相位项分别对应着式(6)中的两个调频率项.积分下限取t0是为了利用式(2)在X0点函数值及一阶导数值为0的性质.式(7)中第一项是我们想保留的相位历程;第二项是由于速度不稳引起的扰动项,它与目标点的位置有关,因而破坏了信号的方位向平移不变性,必须补偿而且也可以被补偿.我们可选方位向坐标为0的点作参考点构造相位补偿函数$5[X(t)]=2P Q t0Q s0$k d(u)duds(8)由式(4)可以看出$k d(t)只与瞬时速度有关,由于瞬时速度已知(实际中利用测量值或利用回波数据分段估计后内插成光滑曲线),所以式(8)很容易算出.用式(8)补偿式(7),得5[X(t)]-$5[X(t)]460电子学报2005年=P K (t -t 0)2-2P tQt$k d (u)du -2PQ t 00Q st$k d(u)duds=P K (t -t 0-S 0)+50(9)式中S 0=1KQ t$k d(u)du50=-2P Kt 0S 0-P K S 20-2P Q t 00Q st$k d(u)duds从式(9)可以看到,与信号位置有关的扰动项已被补偿掉了,补偿过程带来的常数相位50不影响压缩.应当强调的是,本节所讨论的补偿方法并不是对某一目标点的补偿而是对整个场景因沿理想航线速度不稳所引起的相位误差的补偿(当然不同距离单元的相位补偿函数不同,相差一个系数).至此,我们已在时域完成了沿理想航线的运动误差的补偿,也就是速度变化对慢时间域平移不变性影响的补偿,可以对同一距离单元不同方位向位置的信号在频域同时进行压缩.3 仿真和实测数据的成像试验我们对点目标进行仿真试验,选择仿真参数:波长为0.03m,雷达重复频率为909Hz,合成孔径长度取194m,对应的方位分辨率为0.9m,场景中心距离为12km,载机飞行平均速度为116m/s,扰动速度选择了幅值为3m/s,周期为6s,加速度为2m/s 2的三角波,这样选择扰动速度模型与实测速度变化比较近似2m/s 2.图2是场景中一点的成像仿真结果.其中图2(a)是速度为匀速时的成像结果,图2(b)是速度为变速时,速度补偿前的成像结果,图像对称是因为扰动速度相对这个点的分布刚好是对称的,但这并不失一般性;图2(c)是速度补偿后的成像结果.可见补偿的效果明显.我们还用某次试飞所录取的分辨率为1m @1m 的直升机载条带式S AR 数据来做实验.雷达工作在Ku 波段,飞行高度为2000m,场景中心最近斜距为13.3km,距离向场景宽度(成像平面)为2.5km,方位向场景宽度大约2km,分32组(子块),每组512次回波.合成孔径长度取200m,这样在考虑了波束方向图调制因素后方位向分辨率仍达1m.合成孔径长度内最大的距离弯曲量为0.4m,小于距离向分辨率,所以我们不校正距离弯曲而采用二维分离的距离-多普勒算法.由于本试验为验证本文所提沿理想航线的运动补偿方法,所以不校正沿雷达视线方向的运动误差.本文方法要对调频率(可由速度算出)函数二次积分后才作为补偿函数进行补偿,因此是建立在精细、连续估计出航线运动状态基础上的,对速度估计的精度和速度估计的频率要求很高.速度估计的精度是由距离向多单元平均达到的.速度估计的频率是由数据本身的情况决定的.对于本文数据,我们将方位向场景分为32组(子块),每组512次回波,数据分析表明每个子块内速度可以视为不变,其估计值如图3所示.实际补偿时还要将图3估计值进行曲线拟合,在慢时间上形成一条连续曲线以进一步提高补偿精度.图4(a)是未补偿沿理想航线速度变化,直接用平均速度构造方位匹配函数进行压缩的成像结果.图4(b )是使用本文方法补偿了沿理想航线速度变化所成的像.可以明显看出,补偿沿理想航向运动误差后成像质量得到了大幅度提高,这也印证了文献[10]成像质量对沿理想航线的速度误差非常敏感的说法.4 结论本文提出了一种新的机载条带式SAR 沿航向运动补偿方法.它避免了插值处理,提高了运算效率和图像质量,对于开发基于回波数据的机载SAR 实时成像系统有较高的参考价值.理论分析、仿真和实测数据成像表明,本文方法对目前国内大多数机载SAR 系统所录取的数据沿航向的速度补偿是有效的.另外,本文方法也可在装有运动测量系统的SAR 系统中作为自聚焦方法使用.附录 瞬时多普勒调频率近似条件的证明式(4)中D k d (t)可忽略的条件可用下式表示461第 3 期黄源宝:一种新的机载条带式SAR 沿航向运动补偿方法2P Q t t0Q s t0D k d(u)duds[P4,t0-L2V[t[t0+L2V(a-1)即在合成孔径范围内,由D k d(t)引起的相位误差不超过P/4.从式(4)可以看出D k d(t)与目标点的方位向位置和加速度值有关.从惯导所测得的数据看,一般v c(t)最大不超过2m/s2,我们再令D k d(t)表达式中[X(u)-X0]取最大值L/2,式(a-1)积分上限t取L/2V+t0,则当K=0.03m、R0=12km、V=116m/ s时,可算出L[85m.也就是说在上述情况下,合成孔径长度小于85m时,D k d(t)的影响可以忽略.显然,以上分析在L较大时偏于保守.一般L取几十米是没问题的,我们应当找出L 较大时较精确的估算方法.由于D k d(t)是由瞬时加速度v c(t)和天线相对孔径中心点的位置[X(t)-X0]的乘积决定.为研究D k d(t)对二者的敏感程度的不同,我们将D k d(t)式表示成全微分形式${D kd (t)}U${v c(t)}#9{D k d(t)}9{v c(t)}+${[X(t)-X0]}#9{D k d(t)}9{[X(t)-X0]}=-2K R0[X(t)-X0]#${v c(t)}-2K R0v c(t)#${[X(t)-X0]}(a-2)从式(a-2)可以看出,[X(t)-X0]较大时,天线位置的变化与加速度的变化相比,D k d(t)对天线位置的变化是相对远不敏感的.于是我们令v c(t)取加速度的最大值a ma x,且忽略D k d(t)表达式中位置波动Q t t0$v(t)dt的影响,再计算式(a-1)在合成孔径端点时的值,则可解得L[3K R0V2a ma x13(a-3)利用式(a-3)可得当a max=2m/s2、K=0.03m、R0=12km,V= 116m/s时,最大合成孔径长度L ma x=194m,对应的横向分辨率为0.9m;而当K取0.02m最大合成孔径长度为169m,对应的横向分辨率分别为0.7m.致谢感谢西安电子科技大学雷达信号处理重点实验室的井伟博士生给本文提出的参考意见.参考文献:[1]Kirk J.M otion compens ation for synthetic aperture radar[J].IEEETrans.on AES,1975,11(3):338-348.[2]Haslam G,Reid B.Moti on senseing requirement for synthe tic apertureradar[A].Proc IEEE Conf[C].Toronto:IEEE,1983.126-127. [3]Buckreuss S.Motion errors in an airbore synthetic SAR system[J].ET-TJ,1991,2(6):655-660.[4]Carrar W G,Goodman R S,Maj ewski RM.Spotlight Synthetic ApertureRadar:Signal Processing Algorithms[M].Boston:Artec h House,1995.[5]M ancill C E,Swiger J M.A map drift autofocus technique for correc tinghi gher order SAR phase errors[A].Proc.Tr-i s ervice Radar Symp[C].M onterey:CA,1981.391-400.[6]Blac knell D,Free man A,Quegan S,Ward I,Fi mley I,Oli ver C,WhiteR,Wood J.Geometic accuracy in airborne SAR i mages[J].IEEE Transon AES,1989,25(2):241-258.[7]J oao R,M orei ra.A ne w method of aircraft motion error e xtraction fromradar ra w data for real ti me motion compensation[J].IEEE Trans onGR S,1990,28(4):620-626.[8]D E Wahl,P H Eichel,D C Ghigli a,C V J r Jackowatz.Phase gradientautofocus-A robus t tool for high res oluti on SAR phas e correcti on[J].IEEE Trans on GR S,1994,30(3):827-834.[9]Giorgio Franceschetti,Riccardo Landari.Synthetic Aperture Radar Pro-cessi ng[M].London:CRC Pres s,1999.[10]Buckreus s S.Motion compens ation for airborne SAR based on inertialdata,R DM and GPS[A].IGARSS.94[C].Pasadena(USA):IEEE,1994.1971-1973.[11]Potsis A,Reigber A,M i ttermayer J,Moreira,A,Uz unoglou N.Improv-i ng the focusi ng properties of SAR processors for w i de-band and wide-bea m lo w frequency imaging[A].IGARSS.01[C].Sydney:IEEE,2001.3047-3049.[12]邢孟道,保铮.基于运动参数估计的SAR成像[J].电子学报,2001,29(12A):1824-1828.作者简介:黄源宝男,1970年4月出生于甘肃省兰州市,现为西安电子科技大学雷达信号处理重点实验室博士生,主要研究方向为雷达成像.E-mail:ybhuang-2003@保铮男,1927年12月出生于江苏省南通市,现为西安电子科技大学教授、中国科学院院士,主要研究方向为雷达信号处理.462电子学报2005年。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、机载SAR运补用SINS/GPS组合导航技术概述
运动补偿是高分辨率机载SAR的关键
实际航线不可能为匀速直线
SAR成像要求 载机匀速直线飞行
自聚焦方法: 计算量巨大,高分辨率SAR难以实时 基于SINS/GPS的运动补偿: 计算量小,精度高 机载高分辨率SAR实时成像的必要手段 机载合成孔径雷达运动补偿原理图 技术瓶颈
0.003 0.007
德国IGI公司研制的SAR运动补偿用光纤陀螺IMU/GPS组合导航系统 Aerocontrl
14
一、机载SAR运补用SINS/GPS组合导航技术概述 1.2 国内外研究现状——德国
光纤陀螺IMU/GPS组合系统
Aerocontrol Aerocontrol应用于德国DLR研制的E-SAR 使E-SAR实现了 0.25米分辨率 15
0.005 0.005 0.008
加拿大APPLANIX公司的SAR运补用挠性陀螺IMU/GPS组合导航系统
POS/AV 510
12
一、机载SAR运补用SINS/GPS组合导航技术概述 1.2 国内外研究现状——加拿大
POS/AV 510
POS/AV510应用于美国Sandia国家实验室研制的 Lynx SAR 使 Lynx SAR 实现了0.1米分辨率
必须运动补偿
11
一、机载SAR运补用SINS/GPS组合导航技术概述 1.2 国内外研究现状——加拿大
POS/AV510 C/A DGPS 后处理
定位(m)
速度(m/s) 侧滚与俯仰() 实际航向()
4.0~6.0
0.05 0.008 0.070
0.5~2.0
0.05 0.008 0.05
0.05~0.3
阴雨和大气污染 合成孔径雷达 光学相机可观测 是最有效的手段! 天数仅为5~30%
8
我国东北、华北地区大 气污染严重
一、机载SAR运补用SINS/GPS组合导航技术概述
2000年美国干涉合成孔径雷达完成全球地形测绘
21世纪初国际上以高分辨和三维成像为代表的先进 合成孔径雷达成像技术发展迅猛:
9
一、机载SAR运补用SINS/GPS组合导航技术概述
地处偏远,却资源丰富 其中30万平方公里, 终年阴雨雪连绵!
必须 采用SAR人工Biblioteka 图?42人牺牲 100多人受伤
严重阻碍了 西部大开发的进程
西部202万平方公里1:5万无图区
6
一、机载SAR运补用SINS/GPS组合导航技术概述
我国经济社会发展迫切需求高分辨率合成孔径雷达
(3)国家重大需求之三:地址灾害监测
13
一、机载SAR运补用SINS/GPS组合导航技术概述 1.2 POS研究现状——德国
Aerocontrol C/A DGPS 后处理
定位(m) 速度(m/s)
侧滚与俯仰 () 实际航向()
4.0~6.0 0.05
0.006 0.070
0.5~2.0 0.05
0.006 0.05
0.1 0.003
(1)国家重大需求之一:军事需求 获取军事情报不可或缺的手段,在侦察、打击、打击 评估等方面发挥重要作用。
美国Lynx SAR对地面坦克成像 5
合成孔径雷达运动目标检测
一、机载SAR运补用SINS/GPS组合导航技术概述
我国经济社会发展迫切需求高分辨率合成孔径雷达
(2)国家重大需求之二:西部无图区测绘
16
一、机载SAR运补用SINS/GPS组合导航技术概述 1.2 国内外研究现状——中国
起步较晚,引起广泛关注,受到国外的技术封锁
北航与航空618所联合研制了基于SINS/DGPS的机载SAR
运动补偿系统SARMC 获教育部提名科学技术进步一等奖
SARMC
定位(m) 速度(m/s) 侧滚与俯仰 ( ) C/A 5 – 15 0.3 0.03 0.2-0.3 DGPS 1-3 0.1 0.02 0.1
1976年 1979年 1985年 1997年
开始了机载SAR技术的研究 我国第一部合成孔径雷达,180米分辨率 10米分辨率,多极化 3米分辨率
3 米 分 辨 率
1999年美国 0.1米分辨率 (Sandia Lab) 我国第一部合成孔径雷达
10
1997 ~2000年国内机载SAR技术水平 我国早期的SAR图像
第七章、机载SAR运动补偿用SINS/GPS组合导航技术
一、机载SAR运补用SINS/GPS组合导航技术概述 二、系统总体方案与误差分析 三、IMU的精确标定 四、SINS/GPS先进滤波方法 五、空中机动对准与飞行试验研究
1
一、机载SAR运补用SINS/GPS组合导航技术概述
1.1 研究的意义
对地观测——人类社会发展的需求 对地观测
地面沉降、山体滑坡等地质灾 害影响人类的生活质量和生命安全。 干涉合成孔径雷达技术是当前 对地面沉降、山体滑坡进行大面积 有效监测的唯一手段。
山体滑坡 地面沉降
7
一、机载SAR运补用SINS/GPS组合导航技术概述
我国经济社会发展迫切需求高分辨率合成孔径雷达
(4)国家重大需求之四:国土资源调查与监测 • 2000~2010年,国家投入120亿 进行新一轮国土资源调查 • 仍需不断更新
• 观测设备 • 地面数据处理系统
3
一、机载SAR运补用SINS/GPS组合导航技术概述
空基高分辨对地观测的两大技术手段 SAR的优点:
1、全天时/全天候 2、分辨率不受距离影响
SAR
SAR图像
3、穿透成像
4、立体成像
光学相机
4
光学图片
一、机载SAR运补用SINS/GPS组合导航技术概述
我国经济社会发展迫切需求高分辨率合成孔径雷达
高分辨率 对地观测系统
SPOT-5拍 摄 大连机场
国家中长期发展规划 16个重大专项之一!
天基对地观测
2
空基对地观测
近空间对地观测
一、机载SAR运补用SINS/GPS组合导航技术概述
1.1 研究的意义 空基对地观测系统的特点 特点:
• 实时性好 • 分辨率高 • 经济成本低、周期短
组成:
• 飞行器
一、机载SAR运补用SINS/GPS组合导航技术概述 1.2 国内外研究现状——美国
基于光纤陀螺IMU/GPS LTN101 国外的高分辨率机载SAR运动补偿技术已经成熟
美国Litton公司研制的光纤陀螺IMU/GPS组合系统 LTN101 未来发展的甚高分辨率机载SAR的关键仍是运动补偿! 应用于德国Aerosensing研制的AES-1干涉SAR,实现0. 5米分辨率