音圈电机位置伺服控制系统的研究
基于PID算法的音圈电机位置控制系统设计
关键词 音圈直线电机#驱动电路#PID#建模仿真#Luenbeocr Observer;高频噪声 中图分类号 TP391 文献标识码 A 文章编号1007 -7820(2019)07 -076 -06 doi: 10. 16180/j. cnki. imn1007 -7820. 2019. 07. 015
近年来,音圈电机更加趋向于小型化,朝着越来越 精密化的方向发展,音圈电机控制算法也越来越成熟, 音圈电机(Voice Coil Motor)具有高响应、高速度、高加 速度、结构简单、体积小、力特性好、控制方便等优点,广 泛用于高精度定位运动系统中音圈直线电机能 将电能直接转换成直线运动的机械能,而无需中间转换 机构,因而在高性能的直接驱动式伺服系统中得到广泛 应用⑷。本文在对音圈电机位置控制的基础上,针对电 机实际运行中由于噪声干扰而造成的影响,提出了一种 新的控制算法,该算法基于PIP与Luenberger ObseoeO5'结合的控制算法,在此算法基础上加以改进,通过 在电机负载上增加一对反馈电阻来消除噪声。常规 PIP控制算法虽能消除静态误差,但对于高频噪声表现
度;C为阻尼系数;F为导体受到的力•丄和"分别为线 圈的电感量和电阻量。
将上式进行拉普拉斯变换,消去中间变量,和F, 可以求出电机电枢电压与音圈电机位移之间的传递函
收稿日期:2018-12-03 作者简介:汪月生(1991 -),男,硕士研究生。研究方向:智能 信息处理。
阵列式音圈电机定位控制系统的设计
微电机MICROMOTORSVoe.53.No.5My. 2020第53卷第5期2020年 5月阵列式音圈电机定位控制系统的设计王永龙,刘品宽(上海交通大学机械与动力工程学院,上海200240)摘 要:根据光刻机光场均匀性校正器的定位控制特点,设计了阵列式音圈电机定位控制系统,提出了复合非线性反馈! CNF )结合干扰观测器(DOB )的控制算法。
根据设计的控制系统物理模型,完成算法设计与仿真比较,并在实验装置中实现定位控制。
仿 和 果表明,阵列式音圈电机定位控制系统和控制算法能够满足实际需求,且能 抑制外界扰动,具有响应速度快、超调量低、定位精度高和鲁棒性强等优点。
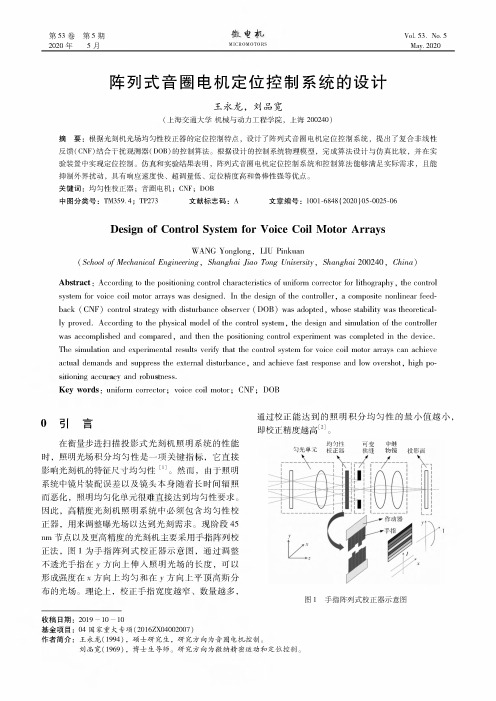
关键词:均匀性校正器;音圈电机;CNF ; DOB中图分类号:TM359. 4: TP273 文献标志码:A 文章编号:1001-6848(2020)05-0025-06Design of Control System for Voice Coii Motor ArraysWANG Yonglong , LIE Pinkuan(School of Mechanical Engineering , Shanghai Jiao Tong Unwerspy , Shanghai 200240, China )Abstract : According to W c positioning controS characte/stics of uniform correctoe foe lithosraphs ,W v controSsystem foe voico coii motoe aneys was designed. In the design of the controllee ,a composite nonlinear feed back (CNF) controS stmWvy with disturbanco observee ( DOB) was adopted ,whose swbility was thevreticel- ly proved . According to the physiccl model of the controS system ,the design and siculation of the contmVvrwas accomplished and compared ,and then the positioning controS expe/ment was completed in the devico.The sirnuition and experimental results e/m that the controS system for veico coii motoe arrays con achieve actual demands and suppress the externdl disturbanco ,and achieve fast response and low overshot ,high po- scoconcngaooueaosand eobusonKs.Key words : uniform corrector ; voico coii motor ; CNF ; DOBo 引言在衡量步进扫描投影式光刻机照明系统的性能时,照明光场积分均匀性是一项关 ,它直接影响光刻机的特 均匀性[1]$然而, 照明系统中镜片装配误差以及镜头本身随着长时间辐照而恶化,照明均匀化单元 接达到均匀性要求。
DSP和ARM的音圈电机伺服控制系统设计
DSP和ARM的音圈电机伺服控制系统设计于地下金属矿设备精确定位与智能导航项目,拟通过二维激光定位和导航基站对地下金属矿设备进行精确定位和导航,音圈电机用于二维基站俯仰方向激光的定位和扫描。
系统除了要完成音圈电机的驱动控制,还需要完成水平方向电机的位置环控制算法,并与地下金属矿设备(以下简称上位机)之间进行以太网数据交换。
课题中,音圈电机的型号为VARS0022032~00A,主要参数如下:总行程为32°,最大输出转矩为0.22 N-m,最大电流为1.4 A,最大电压为15.5 V。
TMS320F28335 是32 位浮点型数字处理器,指令周期约为6.67 ns,适合复杂高速的计算。
STM32F107 是意法半导体的互联型系列微控制器产品,集成了很多高性能工业标准接口。
其中,包括两个12 位A/D(模数)转换器、1 个以太网10/100 Mbps MAC 模块、3 个SPI 接口。
系统中DSP 主要完成系统初始化、位置控制算法,ARM 主要完成PWM 波产生、A/D 采集控制、电流环计算、以太网通信、电机限位和过流保护,以及DSP 之间的数据交换等。
从DSP 的角度,ARM 可以看做是其协处理器。
系统控制功能划分图如图2 所示。
2.2 ARM 功能设计根据2.1 节中的功能划分,来介绍ARM 部分功能模块的设计。
2.2.1 PWM 模块设计STM320F107 具有一个16 位的可产生电机控制PWM 波的定时器,能设置死区时间,同时还能进行急停处理,因此采用STM320F107 定时器模块的增减计数器、比较寄存器和比较器来实现PWM 波的产生。
为了防止功率驱动电路中上下管直通造成电源短路,可以通过配置定时器模块的死区寄存器,在PWM信号中加入死区,使同相的上下桥臂驱动信号错开一个死区时间,防止功率器。
基于模糊PID的直线音圈电机位置控制系统的研究
惯 性 力 和 摩 擦 力 的 作用 ,这 些 力 的 同时 作 用 ,会 产 生 一 个 动 态 平 以 二 者 作 为输 入 量 ,二 者 通 过 模 糊 推 理 输 出 AKP、AKI、△KD,它们
衡 状 态 ,依 据 这 个 动 态 平 衡 状 态 ,直线 音 圈 电 机 的 力 平衡 方 程 可 作 为 PID调 节 器 的 参 数 调 整 量 ,PID 调 节 器 对 积 分 参 数 K.、比例
图 直 线 音 圈 电机 系统 控 制 框 图
2_2 模 糊 PID 控 制 器 的设 计 PID 在 许 多 方 面 存 在 缺 陷 ,初 始 误 差 很 大 ,容 易 引 起 超 调 ;
误 差 的 微 分 信 号 的 产 生 只 能 近 似 实 现 ,误 差 e(t)=x(t)一y(t)按 经 典 意 义 通 常 不 可 微 ,限制 了 PID控 制 器 的使 用 范 围 ;PID 控制 中 的误 差积 分 反 馈 降 低 了闭 环 系 统 响 应 速 度 ,增 加 振 荡 频 率 ,产 生 控 制 量饱 和 ;PID 控 制 器 给 出 的 控 制 量 是 误 差 的 线 性 组 合 ,不
运 动 ,同时 ,线 圈运 动 切 割 磁 感 线 ,又 产 生 了 反 电 动 势 ,反 电 动 势 可 以 表 示 为 :
e,,=BLv
Байду номын сангаас(1)
式 中 ,e 为 反 电 动 势 ,B为 磁 感 应 强 度 ,L为 线 圈 长 度 ,v为 线 圈 切 割 磁 感 线 速 度 。
依 据 基 尔 霍 夫 电压 定 律 ,直 线 音 圈 电 机 的 电 平 衡 方 程 可 以 写 作 [2]:
关键 词 :直 线 音 圈 电机 ,模 糊 PID,位 置 控 制
扁平直线音圈电机伺服控制系统设计

+
−
0
Fd m
阻力 Fd 的组成比较复杂,包括因安装结构造成的与位置
成非线性关系的阻力,以及各种随机的外力抖动干扰,这些
因素也会对系统的跟踪性能造成影响。在设计控制器时,需
要将参数摄动和外力扰动的影响尽可能降低,保证系统的跟
踪性能。
2 鲁棒跟踪控制方法
在实际应用中,对于机械抖动信号无法事先知道,使参 考输入不易预知,因此抖动信号虽然可测,却无法包含在广 义系统的线性模型中。本文将抖动信号用外部扰动来等效, 将跟踪问题转化为标准 H∞ 控制问题,并通过鲁棒 H∞ 控制器
Abstract: For the servo system of linear motion in narrow space, this paper designs a flat-section linear voice coil motor, and adopts a robust tracking control strategy to equivalent the jitter signal to a bounded disturbance, through the state feedback controller of the generalized system. Overcome the influence of uncertain disturbances and ensure the robustness of the system. The simulation results show that the servo system and control method can accurately track the input signal, and reduce the influence of disturbance and parameter variation on system performance, and effectively improve the servo performance and robustness. Keywords: Linear voice coil motor; servo control; robust control
基于音圈电机伺服控制的应用研究
圈
鬯 蚕
星
皇童 至 鱼 窒
基 于音 圈 电机伺 服控 制 的应 用研 究
石 艺楠 , 靖 郝 ( 京 中电科 电子装备有 限公 司, 京 10 7 ) 北 北 0 16
摘 要 : 着 电机 控 制技 术 的不 断发 展 , 统 的伺 服 电机控 制 方式 已经不 能适应 高速度 、 随 传 高精 度
pe io ,s l v rt n ad n i t. t n h曲 sed i rcs npo es ge up n a rcs n mal i ai n os e i i i p e ,hg pei o rc si q ime t s i b o e c h i n h
p st n o to , Li e d i e t r i t rv m o e u t t e a c l t n f a l n em e it e d d e o h c n e l i o l ao it r d a e r n miso i s a h d a t g s o i l tu t r ,f s y a i e p n e i h s e d i h ta s s i n l k ,h st e a v n a e fs n mp e sr cu e a td n m c r s o s ,h g p e ,h g
音圈电机伺服驱动器与运动机构设计
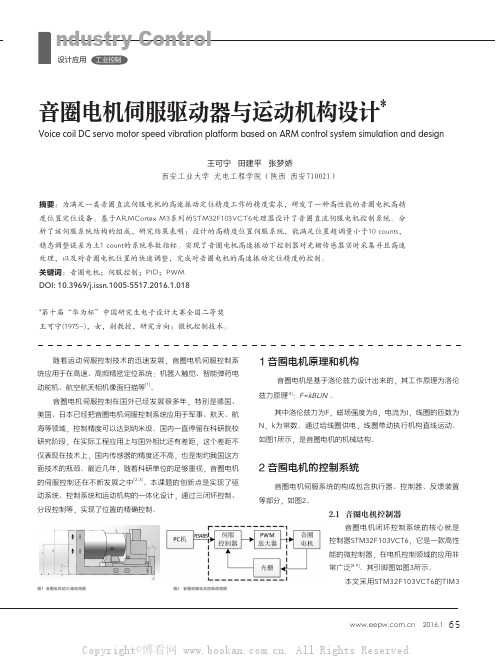
图1 音圈电机的三维结构图 图2 音圈伺服电机控制原理图2.2 电机驱动电路设计音圈电机伺服系统采用PWM方式调速立元件晶体管或者MOS管来搭建H己搭建的H桥电路不够稳定,发热量大H桥组件LMD18200[10],STM32输出的过H桥集成芯片LMD18200放大,进一步控制音圈电机的运动在本系统中,通过STM32F103VCT6信号包括PWM信号、DIR信号和BRANKE信号。
如图4所示为LMD18200的原理图。
3 音圈电机的控制策略“控制”可以定义为一个系统中一个或多个输出量产生影响的结果,其特征是开环作用路径,即控制链路。
“调节”是在一个系统中,对被调节量连续不断地进行检测,与基准量进行比较,并从与基准量平衡补偿的意义上对该被调量产生影响的过程,其特征是闭环作用路径,即调节回路。
音圈电机伺服控制采用两闭环控制,内环为速度流环,外环为位置环。
如图所示。
3.1 音圈电机速度环驱动器速度环以位置为调整目标,时刻检测音圈电机的位置信息,进而调整速度。
因为现实中电机准确定位,用固定占空比控制会导致电机速度随着负载的变化而变化。
选用MicroE 公司的光栅尺作为反馈回路的反馈传感器。
MicroEMTE系列微型读数头,增强型的分辨率0.5μm,标准型的分辨率为1μm。
对速度反馈量做PID算法占空比可以实现速度闭环。
如图6。
图3 STM32F103VCT6引脚图图4 LM18200T驱动原理图图5 控制回路结构原理图图6 速度环方框图图7 阶跃信号的响应曲线图8 速度曲线和位置曲线图9 速度和位置变化曲线6674ELECTRONIC ENGINEERING & PRODUCT WORLD2016.1的电量,就得到传送给输出的电荷量。
图 3 显示,输出超级电容器用 Midé V25W 换能器充电至 3.6V 。
输出超级电容器充电至 3.6V 大约需要 3300 秒时间。
图2 Midé V25W 给 18µF 输入电容充电,在 208ms 时间内从 4.48V 充电至 5.92V 图3 Midé 25W 给输出超级电容器充电至 3.6V图4 Midé 25W 使输出电容器从 2.5V 充电至 3.6V 图5 当振动源关断时,输出超级电容器放电。
音圈电机位置伺服系统电流驱动器的两种设计方法研究

Re e r h o wo Drv n M eh d fVo c i M o o o iin S r o S se s a c n T ie t o so ie Col t r P sto e v y t m
LIL y ,L U l ,W U n xng i i I Li i Ho g i
第4 4卷 第 1 期 1
2 1正 01
蕨 粕
MI CR OM O T RS O
V0. 4.No 1 14 . 1
NO . 0l1 V2
l 月 1
音 圈 电机 位 置 伺 服 系统 电流驱 动器 的 两种 设 计 方 法研 究
李立毅 ,刘丽丽 ,吴红 星
( 哈尔滨工业大学 电磁 与电子技术研究所 ,哈尔滨
摘
10 0 ) 50 1
要 :分析音圈电机数学模型的基础上 ,在 M t b的 Sm l k环境 中建立 了音圈 电机 位置伺 服系统 的仿真模 型 , al a iui n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
硕 士 研 究 生:刘丽丽
导
师: 李立毅教授
申 请 学 位:工学硕士
学
科: 电气工程
所 在 单 位:电气工程及自动化学院
答 辩 日 期:2010 年 7 月
授 予 学 位 单 位: 哈尔滨工业大学
Classified Index: TM301.2 U.D.C: 621.3
本文主要针对音圈电机位置伺服系统的应用场合,对音圈电机控制系统进行了 研究。整理并分析了音圈电机控制系统的发展现状,并建立了控制系统的数学模型, 进行了仿真分析,搭建实际系统,最终进行了相关试验研究。
首先,本文介绍了音圈电机的基本结构和工作原理,在此基础上建立了音圈电 机的数学模型并给出了传递函数关系式,对其动态特性和最佳控制参数进行了分 析。
Keywords: Voice Coil Motor; Feed-forward Control; PWM; Position Servo System
- II -
哈尔滨工业大学工学硕士学位论文
目录
摘 要 ................................................................................................................................. I
1.1 课题背景及研究意义.............................................................................................. 1 1.2 国内外研究现状...................................................................................................... 2
哈尔滨工业大学工学硕士学位论文
摘要
音圈电机是基于洛伦兹力原理设计而成的一种直流直线电机,它具有良好的 静、动态性能和控制特性。由于其无需传动机构即可获得直线运动,因此消除了传 动机构带来的机械磨损,在位置伺服控制的基础上可以实现精密的位置ห้องสมุดไป่ตู้服,尤其 在短行程高频往复直线运动的精密加工场合中具有广阔的应用前景。
关键词:音圈电机;前馈控制;PWM;位置伺服系统
-I-
哈尔滨工业大学工学硕士学位论文
Abstract
Voice coil motor is a kind of DC motor based on the Lorentz force principle, it has good static and dynamic performance and control characteristics. As it can obtain rectilinear motion without any revolving gear, there is no transmission machinery wear. Therefore it can achieve precise position servomechanism, especially in occasions of the precision machining of short stroke high-frequency reciprocating linear motion it has broad application prospects.
Date of Defence:
Prof. Li Lily Master of Engineering Electrical Enginnering School of Electrical Engineering and Automation
July, 2010
Degree-Conferring-Institution: Harbin Institute of Technology
根据上述工作的基础上,对音圈电机位置伺服控制系统的软件实现和硬件系统 进行了设计。硬件系统设计工作包括:功率驱动电路设计、DSP 及其外围电路设计, 电平匹配电路设计以及接口电路设计。软件设计包括:主程序设计、中断程序设计 以及控制算法程序和滤波程序的编写等。
最终,根据所建立的伺服系统实验平台进行了相关的试验研究和试验数据分 析,验证了所建立系统的正确性并对理论和所产生的试验误差进行了分析。
Dissertation for the Master Degree in Engineering
RESEARCH ON POSITION SERVO CONTROL SYSTEM FOR VOICE COIL MOTOR
Candidate:
Liu Lili
Supervisor: Academic Degree Applied for: Speciality: Affiliation:
1.2.1 音圈电机发展现状 .......................................................................................... 2 1.2.2 音圈电机伺服系统发展 .................................................................................. 2 1.3 音圈电机伺服控制相关技术发展.......................................................................... 5 1.3.1 控制理论的发展 .............................................................................................. 5 1.3.2 微处理器的发展 .............................................................................................. 6 1.3.3 位置传感器技术发展 ...................................................................................... 7 1.4 本课题主要研究内容.............................................................................................. 8 第 2 章 音圈电机及其控制系统数学模型建立 .............................................................. 9 2.1 引言.......................................................................................................................... 9 2.2 音圈电机的工作原理.............................................................................................. 9 2.3 音圈电机的数学模型............................................................................................ 10 2.3.1 音圈电机电压平衡方程 ................................................................................ 10 2.3.2 电机的力平衡方程 ........................................................................................ 11 2.3.3 电机的数学模型 ............................................................................................ 11 2.4 音圈电机的动态特性............................................................................................ 12 2.5 电机的最佳控制参数............................................................................................ 13 2.6 本章小结................................................................................................................ 15 第 3 章 音圈电机控制策略研究及仿真分析 ................................................................ 16 3.1 音圈电机控制系统组成........................................................................................ 16 3.2 音圈电机控制方法策略........................................................................................ 16 3.3 音圈电机的PWM驱动技术 .................................................................................. 17 3.3.1 音圈电机的双极性可逆PWM驱动技术....................................................... 18 3.3.2 PWM驱动时脉动电流计算............................................................................ 19 3.4 控制系统仿真........................................................................................................ 21 3.4.1 音圈电机电流环设计 .................................................................................... 22 3.4.2 音圈电机位置环设计 .................................................................................... 26 3.5 本章小结................................................................................................................ 30 第 4 章 音圈电机伺服控制系统设计 ............................................................................ 31