摄影测量学最新课件-单元5-1
合集下载
《摄影测量学》第5讲-航摄像片的比例尺PPT课件

1 f mH
在像片倾角很小、地形起伏不 大时, H取平均航高,可以看 成是像片的概略比例尺。
No Image
1 f mH
1:2000
1:12000
1:35000
• 对于同一个航摄相机,相对航高决定了像片比例尺。 • 像片的成图比例尺大体上和像片比例尺相当。
Calculation:
An aerial camera has a 23cm square film format and a 100mm focal length lens.
②像主点的像比例尺 此时
No Image
No Image
2、特殊点、线的比例尺 • 特殊点的像比例尺
②像主点的像比例尺
No Image
No Image
No
No
像主点沿主横线方向比例尺
Image
Image
No Image
No Image
像主点沿主纵线方向比例尺
2、特殊点、线的比例尺 • 特殊点的像比例尺
关系? 地面辅助坐标系
已知
Z G
ZT
X
YT
G
A
地面点
大地坐标系
OT
O
Y
XT
G
复 习 Review
•研究历程(Approach) Step2:描述坐标系之间的关系
像点
摄 影 测 量
地面点
框标坐标系 关系?
像空间坐标系 关系?
地面辅助坐标系 已知
大地坐标系
x0 , y0 , f
内方位元素
外方位元素
线元素: XS、YS、ZS
x、、 角元素: 、 y、 、 、v
复 习 Review
摄影测量学基础第5章 双像解析立体测量

三、空间后方交会的具体计算过程
(1) 获取原始数据。从摄影资料中查取平均航高与摄影机主距;从外业 测量成果中获取地面控制点的地面测量,或转换为地面摄影测量坐标。
(2)用像点坐标量测仪器量测像点坐标。
(3)确定未知数的初始值:在竖直摄影情况下,三个角元素的初始值取
为: 0
三个直线元素取为:
两像点的像空间坐标分为 (x1,y1,-f)和(x2,y2,-f),地 面点A在两像空辅坐标系 中的坐标分别为 (U1,V1,W1)和(U2,V2,W2)。 摄影基线B在地面坐标系中的分量得:Bx=Xs2-Xs1, BY=Ys2-Ys1,Bz=Zs2-Zs1。
由相似三角形可知
N S1A
X AXS1
4.空间前方交会计算未知点的空间坐标(利用 3得到的数据计算投影系数N,得到各点的地 面坐标。)
§5.4 解析相对定向和模型的绝对定向
通过后方交会-前方交会原理,可由像点坐标求得 地物点的摄影测量坐标,这是摄影测量解求地面坐 标的第一套方法。摄影测量的第二套方法是通过像 对的相对定向-绝对定向来实现的。
对左右影像上的一对同名点,按上式可列4个方程, 可按最小二乘法解求地面点的3个未知数。
若n幅影像中含有同一空间点,则可列2n个线性方 程解求3个未知数。这是一种严格的、不受影像数 约束的空间前方交会。
§5.3 空间后-前方交会求解地面点位置
1.野外像片控制测量(4角控制点的地面坐标)
2.像点坐标量测(立体坐标量测仪,量出左右 像片同名像点的坐标) 3.空间后方交会计算像片的外方位元素(12个 外方位元素,用计算机编程实现)
U x
V
R
y
W f
N1U1 BX N2U 2
N1V1
第5章 摄影测量解析基础

,
X s
Ys
x
Z s
,
x (x)
L
பைடு நூலகம்
y
( y)
A
a11 a21
a12 a22
a13 a23
Xs Ys Zs
X
Y Z
R
1
0 0
1
0 0 0
1 X
0 R Y
0 Z
c1 0 a1 a1 a2 a3 X
c2
0
a2
b1
b2
b3
Y
0 n
+(二次以上项)
偏导系数的值是用X的初始值代入后算得。
共线条件方程线性化
设外方位元素的初始值为 X S0 ,YS0 , ZS0 , 0 , 0 , 0
x
x
x X S
dX S
x YS
dYS
x Z S
dZS
x
d
x
d
x
d
y
y
y X S
R1
R 1 R
R1
R
R
1
c os
0
0 1
sin sin
0
0
0 0
cos
0
sin 0 cos cos 0 sin
太原理工大学摄影测量学-第五章双像解析摄影测量1-3

§2.物点坐标的计算―空间前方交会
二、共线条件方程式法(严密解法)
x x0[a3( X X S ) b3(Y YS ) c3(Z ZS )] fa1(X X S ) b1(Y YS ) c1(Z ZS ) y y0[a3(X X S ) b3(Y YS ) c3(Z ZS )] fa2(X X S ) b2(Y YS ) c2(Z ZS )
像点各自像点坐标, 从方程个数来讲,有4 个方程,可以解算。
§1.双像解析摄影测量的方法
一、双像解析摄影测量概念
由于利用单张像片不能唯一确定被摄物体的空间位置。要确定被摄 物体的空间物置,必须利用具有一定重叠的两张像片,构成立体模型来 确定被摄物体的空间位置。 按立体像对与被摄物体的几何关系,以数学计算方式,通过计算机 解求被摄物体的三维空间坐标,称之为双像解析摄影测量,又称立体摄 影测量。
§2.物点坐标的计算―空间前方交会
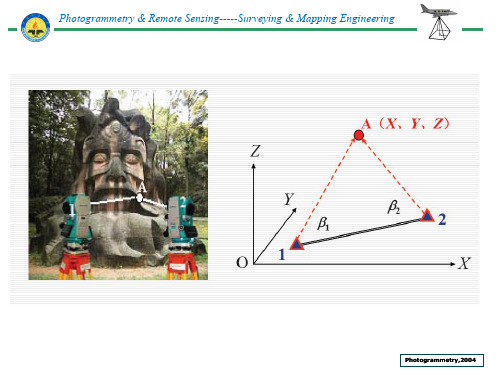
立体像对前方交会的概念 只有利用立体像对上的同名像点,才能得到两条同名射线 在空间相交的点,即该地面点的空间位置。 空间前方交会:由立体像对中两张像片的内外方位元素和 像点坐标来确定相应地面点的地面坐标的方法。
§2.物点坐标的计算―空间前方交会
z1
y1
x1 S1
§1.双像解析摄影测量的方法
三、双像解析处理立体像对的方法
根据摄得的立体像对的内在几何特性,按物点、摄站点与像点 构成的几何关系,用数字计算方式求解物点的三维空间坐标的 方法有三种: 用单张像片的空间后方与立体像对前方交会方式求解物点的三 维空间坐标。 用相对定向和绝对定向方法求解地面点的三维空间坐标。 采用光束法求解地面点三维坐标。
f f
Z Zs c1x c2 y c3 f
A
中国矿业大学摄影测量学课件
3. 摄影测量的分类 摄影测量的分类: 地形摄影测量(Topography Photogrammetry): 地形图和专题图, 为GIS提供3D数据 非地形摄影测量: 工业,建筑,考古,医学, 生物,体育,变形观测,公安侦破,事故调查. 应用广泛 航天摄影测量, 航空摄影测量 (Aerial Photogrammetry), 近景摄影测量(Digital Close-range Photogrammetry),显微摄影测量
模拟摄影测量(Analog photogrammetry) §1.2 模拟摄影测量 1839年盖达尔 盖达尔发明摄影术,摄影测量 Father of Photogrammetry 盖达尔 已经有160多年的历史。将摄影技术真正 用于测量的是1851~1859年法国陆军上校 劳塞达(Laussedat),用地面正直摄影进 行交会摄影测量测绘建筑物。 从空中拍摄地面的照片,最早是1858 Laussedat(1819-1907) 年纳达 纳达在气球上获得的。1903年莱特兄 纳达 弟发明飞机后,才使航空摄影测量成为 可能。在第一次世界大战中,第一台航 空摄影机问世后,使航空摄影测量成为 20世纪以后大面积测制地形图最有效的 快速方法。我国航空摄影测量开始于 1930年,但进入兴旺发达时期是1949年 新中国成立以后的事。
近景摄影测量应用举例: 事故重建(Accident Reconstruction) 近景摄影测量应用举例 事故重建
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
Photogrammetry,2004
Photogrammetry,2004
中国矿业大学摄影测量学课件 共49页

GPS接收
(环)
机
飞机 前方交会,后
摄影测量
航空摄影 机
方交会,光束 法平差,空中
三角测量
最小二乘 法
最小二乘 法
最小二乘 法
测量结果 X,Y,Z X,Y,Z
X,Y,Z
产品 地形图 地形图
地形图
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
Wild A8 模拟测图仪
Photogrammetry,2004
Reconstructed CAD Model
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
近景摄影测量应用举例: 考古(Archeology)
Photogrammetry,2004
Photogrammetry),显微摄影测量
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Surveying & Mapping Engineering
摄影测量学课件ppt
Z轴位于左主核面内 ( S1 S 2及 o1所在平面)
36
返回目录
单独法相对定向系统
37
第五章 双像解析摄影测量
相对定向元素为: 1 , 1 , 2 , 2 , 2 显然, 在 S1 XYZ 中,
X S1 YS1 Z S1 0
返回目录
§5-4 解析相对定向及模型坐标计算
摄影测量学
1
目
第一章
1-1 1-2 1-3
录
绪论
摄影测量的定义和任务 影像信息科学的形成与内涵 影像信息科学的组成
第二章
2-1 2-2 2-3 2-4 2-5
摄影的基本知识与影像误差处理
摄影原理与摄影机 黑白感光材料 摄影处理与像片晒印 航空摄影及摄影测量对摄影的基本要求 像片影像的误差及其处理
2
目
第三章 单张航摄像片解析
3-1 3-2 3-3 3-4 3-5 3-6 3-7 中心投影的基本知识 摄影测量常用坐标系 像片的内外方位元素 像点在不同坐标系中的变换 中心投影的构像方程(共线方程) 像点位移 单像空间后方交会
录
3
目
第四章 立体观察和立体量测
4-1 4-2 4-3 4-4 人眼的立体视觉 人造立体视觉 像对的立体观察 像对的立体量测
34
第五章 双像解析摄影测量
为什么BX不是相对定向元素?
返回目录
§5-4 解析相对定向及模型坐标计算
B 'Y BX
'
Z
Y
s2
a '2 BX
'
s2
B Z a2
'
s1
BZ X BY
a1
Am
35
A
36
返回目录
单独法相对定向系统
37
第五章 双像解析摄影测量
相对定向元素为: 1 , 1 , 2 , 2 , 2 显然, 在 S1 XYZ 中,
X S1 YS1 Z S1 0
返回目录
§5-4 解析相对定向及模型坐标计算
摄影测量学
1
目
第一章
1-1 1-2 1-3
录
绪论
摄影测量的定义和任务 影像信息科学的形成与内涵 影像信息科学的组成
第二章
2-1 2-2 2-3 2-4 2-5
摄影的基本知识与影像误差处理
摄影原理与摄影机 黑白感光材料 摄影处理与像片晒印 航空摄影及摄影测量对摄影的基本要求 像片影像的误差及其处理
2
目
第三章 单张航摄像片解析
3-1 3-2 3-3 3-4 3-5 3-6 3-7 中心投影的基本知识 摄影测量常用坐标系 像片的内外方位元素 像点在不同坐标系中的变换 中心投影的构像方程(共线方程) 像点位移 单像空间后方交会
录
3
目
第四章 立体观察和立体量测
4-1 4-2 4-3 4-4 人眼的立体视觉 人造立体视觉 像对的立体观察 像对的立体量测
34
第五章 双像解析摄影测量
为什么BX不是相对定向元素?
返回目录
§5-4 解析相对定向及模型坐标计算
B 'Y BX
'
Z
Y
s2
a '2 BX
'
s2
B Z a2
'
s1
BZ X BY
a1
Am
35
A
摄影测量基础知识课件

05
摄影测量实践与技能提升
掌握基本操作技能与规范要求
摄影测量仪器设备使用
熟悉各类摄影测量仪器设备的性能、特点和操作流程,能 够准确设置参数和操作流程,确保测量数据的准确性和可 靠性。
摄影测量软件应用
掌握摄影测量软件的基本功能和应用技巧,包括数据处理 、图像拼接、三维建模等,提高数据处理和图像分析的效 率。
THANK YOU
像片控制测量与空中三角测量
像片控制测量
像片控制测量是摄影测量的重要环节之一,通过在像片上选择控制点并测定其坐标,为后续的空中三角测量提供 基础。控制点的选择应遵循一定原则,如分布均匀、覆盖整个拍摄范围等。
空中三角测量
空中三角测量是摄影测量的核心环节,通过在多张像片上确定像片之间的几何关系,从而实现对目标点的三维定 位。空中三角测量需要借助像片控制点坐标和相机内外参数等信息,通过一定的算法计算出目标点的空间位置。
摄影测量基础知识课件
目 录
• 摄影测量概述 • 摄影测量基本技术 • 摄影测量应用领域与案例 • 摄影测量新技术与发展趋势 • 摄影测量实践与技能提升
01
摄影测量概述
摄影测量的定义与分类
定义
摄影测量是指通过使用摄影机或其他传感器系统获取图像,并通过测量和分析 这些图像来获取目标物体的形状、大小、位置和运动信息的一门技术。
03
摄影测量应用领域与案例
城市规划与土地利用调查
城市规划
摄影测量技术可以提供高精度的地形 数据和空间信息,有助于城市规划师 合理规划城市空间布局,合理安排公 共设施、交通网络和绿地等。
土地利用调查
通过摄影测量技术,可以获取各类土 地利用数据,包括建设用地、农业用 地、林地等,为土地资源管理和利用 提供基础数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. Description of the business
Text
4. Description of the
Text
business
Text
2. Description of the business
5. Description of the business
Text
3. Description of the business
a3 ( X a2 ( X
X s ) b1(Y
X s ) b3 (Y X s ) b2 (Y
Ys ) c1(Z Zs )
Ys ) c3(Z Zs ) Ys ) c2 (Z Zs )
直接建立地面坐标和扫描坐标系间的关系。
a3(X X s ) b3 (Y Ys ) c3 (Z Zs )
课题1 DOM的基本理论与实 践
第二步:设置多模型拼接区域及参数 按照相同的步骤,生成测区内其他模型的DOM之后,将多个单模型拼接
起来,生成整个区域的DOM。在实际工作中,要逐个建立测区的模型,然 后对它们进行拼接。DEM拼接后才能进行DOM的镶嵌。
在VirtuoZo NT主界面中,单击镶 嵌主菜单,选择设置,系统弹出 “多影像模型”对话框,用户在 此设置选择镶嵌项目并设定镶嵌 范围。
1)间接法数字微分纠正: 1)计算地面点平面坐标:
X’ = X0 + M * X Y’ = Y0 + M * Y 其中, (X’ ,Y’)---与正射影像上点对应的地面坐标; (X0,Y0)---正射影像左下角图廓点的地面坐标; M---正射影像比例尺分母。 点的高程Z’由DEM内插得到。
课题1 DOM的基本理论与实 践
二、像片纠正方法分类
课题1 DOM的基本理论与实 践
像片 纠正
光学纠正 微分纠正
一次纠正(投影变换)
在一张航摄像片范围内,按照地形高
分带纠正:程,将作业区分成若干带区,使每一
带区因地形起伏引起的投影差小于规 定的值,对每一带区分别纠正。
光学微分纠正:利 进用 行计算机控制的正射投影仪来
数字微分纠正:直接用计算机对数字影像进行逐
课题1 DOM的基本理论与实 践
与像片平面图相比较,航摄像片存在着: (1)像片倾斜引起的像点位移 (2)地面起伏引起的像点位移 (3)摄站点之间由于航高差引起的各张像片间的比例尺与成 图比例尺不一致。
利用航摄像片编制像片平面图或正摄影像图是中心投影转变为 正摄投影的问题。
因此,为了消除像片与像平面图的差异,需要将竖直摄影的 像片消除像片倾斜引起的像点位移和限制或消除地形起伏引 起的投影差,并将影像归化为成图比例尺。
5)数字正射影像镶嵌制作正射影像图(像片平面图)
四、数字正射影像图制作
课题1 DOM的基本理论与实 践
正射影像图(Digital Orthophoto Map,缩写DOM):利用 DEM对经过扫描处理的数字化航空像片或遥感影像(单色或 彩色),经逐像元进行辐射改正、微分纠正和镶嵌,并按规 定图幅范围裁剪生成的形像数据,带有公里格网、图廓(内、 外)整饰和注记的平面图。
• 航摄像片只要消除像片倾斜与地形起伏引起的像点位移, 就能将中心投影变换为正射投影。
课题1 DOM的基本理论与实 践
像片纠正的概念:为了消除像片与像片平面图的差异 ,对原始像片进行投影变换,使变换后得到的影像相 当于航摄仪物镜主光轴在铅垂位置摄影的水平像片, 同时限制或消除地形起伏引起的投影差,并将影像归 化为成图比例尺,这项工作称为像片纠正。
Y
像 素 P(I,J), 对 应 地 面 坐 标 (X,Y)
该地面点(X,Y)对应的原始像片 y 上像点坐标(x,y),一般不落在
对应像素g(i,j)的中心
X 正射影像图
x 原始像片
课题1 DOM的基本理论与实 践
原始图像
纠正图像
课题1 DOM的基本理论与实 践
若进行了影像内定向,就可以得到像点坐标所对应数字影像中像元的行 列号。也可以由物空间坐标直接解求所对应数字影像中像元的行列号。
纠正 航空像片
正射投影仪
数字微分纠正 数字微分纠正
航空像片、卫 片
工作站
手工
手工、半自动
全自动
三、数字微分纠正
课题1 DOM的基本理论与实 践
根据有关的参数和数字高程模型(DEM),利用相应的构 像方程式,或按一定的数学模型用控制点解算,从原始的非 正射投影的数字影像获取正射影像,这种过程是将影像化为 很多微小的区域逐一进行,且使用的是数字方式处理,称为 数字微分纠正或数字纠正。
ThemeGallery is a Design Digital
Content & Contents mall developed
Text
by Guild Design Inc.
一、 摄影测量学的定义
Phase 1
Phase 2
Phase 3
Add your text
Add your text
Add your text
Click to edit title style
▪ Click to add Text ▪ Click to add Text ▪ Click to add Text ▪ Click to add Text
从空白纠正影像上按行列顺序依次以每个像点点位反算其在原始影像中的点 位,同时把原始影像点位的亮度值赋给纠正影像上的象元,然后还要进行内插。
2)计算像点坐标:
利用反算映射关系和上一步的地面点坐标, 计算原始影像上对应点p的像点坐标(x,y)。
反算映射关系可以是共线条件方程式,也可
x
y
f f
a1 ( X
B C’ A
航摄像片与像片平面图的区别:
S
f a b cd
p
课题1 DOM的基本理论与实 践
S
a b cd
f
f
p
H
B A
D C
FA
B
C
D
F
E
E
a0
b0
c0 d 0
f0
a0
b0
c0 d 0
f0
a0b0 c0b0 ?c0?d0 ? d0 f0 H
ab cb cd df f
a0b0 c0b0 c0d0 d0 f0 H ab cb cd df f
第三步:正射影像镶嵌及检查
课题1 DOM的基本理论与实 践
在VirtuoZo NT主界面中,单击镶嵌,选择设置,在“多影像模型”对话框
中,勾选拼接选项中的正射影像,然后选择VirtuoZo NT主界面中的镶嵌下
的自动镶嵌,系统按“多影像模型”对话框中设置的参数,自动进行正射
Hale Waihona Puke 影像镶嵌处理。课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
像片纠正的实质是对原始的航摄像片进行处理,即用某 些光学投影的仪器进行投影变换,使变换后得到的影像相 当于摄影仪物镜光轴在铅垂位置时摄取的水平像片,同时 改化至规定的比例尺或应用计算机按相应的数学关系式进 行结算,从原始非正像的数字影像获取数字正射影像的作 业过程。
DOM的制作是基于DEM,采用反解法进行数字微分纠正而制作。过程是全 自动的。
在VirtuoZo NT主界面中,选择设置菜单中正射影像参数,进行DEM格网间 隔设置和正射影像分辨率设置。 第一步:生成DOM
DEM建立后,就可以生成DOM了。 在VirtuoZo NT主界面中,单击产 品主菜单,选择生成正射影像, 系统自动生成当前模型的正射影 像,正射影像的文件为***.orl(左 影像的正射影像文件)和***.orr (右影像的正射影像文件)。
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
五、摄影测量的发展
模拟摄影测量 1900 - 70s
解析摄影测量 1960s -- 90s
数字摄影测量 1980s -- Now
Click to edit title style
ThemeGallery is a Design Digital Content & Contents mall developed by Guild Design Inc.
• 由纠正后的像点坐标(X,Y)反求其在原始影像上的像点坐 标(x,y),称为间接解法。
•
X = x(x,y) ; Y = y(x,y) (2)
• 由原始图象上的像点坐标(x,y)解求其在纠正影像上的相 应点坐标(X,Y),称为直接解法。
课题1 DOM的基本理论与实 践
已知像片的内、外方位元素,从已知DEM中获得地面点 的高程。
数字微分纠正
图像匀色处理
图幅镶嵌
图幅镶嵌
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
数字摄影测量软件DOM生产流程
内 定 向
相 对 定 向
绝 对 定 向
生 成 D E
M
生 成 D O M
质 量 检 查 、 整 饰
识别框 标
自动
人工选取控 制点
自动
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
数字微分纠正原理
• 数字微分纠正:按原始影像与纠正影像间存在的映射关系, 实现两个二维图象间的几何变换。
• 设:任意像元在原始影象中的坐标为(x,y),在纠正后 的影象中的坐标为(X,Y)。二者间存在映射关系:
•
x = fx(X,Y) ; y = fy(X,Y) (1)
纠正后的像片仍是中心投影,因此只能消除像片倾斜引 起的像点位移,不能消除地形起伏产生的投影差,理论上 只有平坦地区的航摄像片才适合使用。
Text
4. Description of the
Text
business
Text
2. Description of the business
5. Description of the business
Text
3. Description of the business
a3 ( X a2 ( X
X s ) b1(Y
X s ) b3 (Y X s ) b2 (Y
Ys ) c1(Z Zs )
Ys ) c3(Z Zs ) Ys ) c2 (Z Zs )
直接建立地面坐标和扫描坐标系间的关系。
a3(X X s ) b3 (Y Ys ) c3 (Z Zs )
课题1 DOM的基本理论与实 践
第二步:设置多模型拼接区域及参数 按照相同的步骤,生成测区内其他模型的DOM之后,将多个单模型拼接
起来,生成整个区域的DOM。在实际工作中,要逐个建立测区的模型,然 后对它们进行拼接。DEM拼接后才能进行DOM的镶嵌。
在VirtuoZo NT主界面中,单击镶 嵌主菜单,选择设置,系统弹出 “多影像模型”对话框,用户在 此设置选择镶嵌项目并设定镶嵌 范围。
1)间接法数字微分纠正: 1)计算地面点平面坐标:
X’ = X0 + M * X Y’ = Y0 + M * Y 其中, (X’ ,Y’)---与正射影像上点对应的地面坐标; (X0,Y0)---正射影像左下角图廓点的地面坐标; M---正射影像比例尺分母。 点的高程Z’由DEM内插得到。
课题1 DOM的基本理论与实 践
二、像片纠正方法分类
课题1 DOM的基本理论与实 践
像片 纠正
光学纠正 微分纠正
一次纠正(投影变换)
在一张航摄像片范围内,按照地形高
分带纠正:程,将作业区分成若干带区,使每一
带区因地形起伏引起的投影差小于规 定的值,对每一带区分别纠正。
光学微分纠正:利 进用 行计算机控制的正射投影仪来
数字微分纠正:直接用计算机对数字影像进行逐
课题1 DOM的基本理论与实 践
与像片平面图相比较,航摄像片存在着: (1)像片倾斜引起的像点位移 (2)地面起伏引起的像点位移 (3)摄站点之间由于航高差引起的各张像片间的比例尺与成 图比例尺不一致。
利用航摄像片编制像片平面图或正摄影像图是中心投影转变为 正摄投影的问题。
因此,为了消除像片与像平面图的差异,需要将竖直摄影的 像片消除像片倾斜引起的像点位移和限制或消除地形起伏引 起的投影差,并将影像归化为成图比例尺。
5)数字正射影像镶嵌制作正射影像图(像片平面图)
四、数字正射影像图制作
课题1 DOM的基本理论与实 践
正射影像图(Digital Orthophoto Map,缩写DOM):利用 DEM对经过扫描处理的数字化航空像片或遥感影像(单色或 彩色),经逐像元进行辐射改正、微分纠正和镶嵌,并按规 定图幅范围裁剪生成的形像数据,带有公里格网、图廓(内、 外)整饰和注记的平面图。
• 航摄像片只要消除像片倾斜与地形起伏引起的像点位移, 就能将中心投影变换为正射投影。
课题1 DOM的基本理论与实 践
像片纠正的概念:为了消除像片与像片平面图的差异 ,对原始像片进行投影变换,使变换后得到的影像相 当于航摄仪物镜主光轴在铅垂位置摄影的水平像片, 同时限制或消除地形起伏引起的投影差,并将影像归 化为成图比例尺,这项工作称为像片纠正。
Y
像 素 P(I,J), 对 应 地 面 坐 标 (X,Y)
该地面点(X,Y)对应的原始像片 y 上像点坐标(x,y),一般不落在
对应像素g(i,j)的中心
X 正射影像图
x 原始像片
课题1 DOM的基本理论与实 践
原始图像
纠正图像
课题1 DOM的基本理论与实 践
若进行了影像内定向,就可以得到像点坐标所对应数字影像中像元的行 列号。也可以由物空间坐标直接解求所对应数字影像中像元的行列号。
纠正 航空像片
正射投影仪
数字微分纠正 数字微分纠正
航空像片、卫 片
工作站
手工
手工、半自动
全自动
三、数字微分纠正
课题1 DOM的基本理论与实 践
根据有关的参数和数字高程模型(DEM),利用相应的构 像方程式,或按一定的数学模型用控制点解算,从原始的非 正射投影的数字影像获取正射影像,这种过程是将影像化为 很多微小的区域逐一进行,且使用的是数字方式处理,称为 数字微分纠正或数字纠正。
ThemeGallery is a Design Digital
Content & Contents mall developed
Text
by Guild Design Inc.
一、 摄影测量学的定义
Phase 1
Phase 2
Phase 3
Add your text
Add your text
Add your text
Click to edit title style
▪ Click to add Text ▪ Click to add Text ▪ Click to add Text ▪ Click to add Text
从空白纠正影像上按行列顺序依次以每个像点点位反算其在原始影像中的点 位,同时把原始影像点位的亮度值赋给纠正影像上的象元,然后还要进行内插。
2)计算像点坐标:
利用反算映射关系和上一步的地面点坐标, 计算原始影像上对应点p的像点坐标(x,y)。
反算映射关系可以是共线条件方程式,也可
x
y
f f
a1 ( X
B C’ A
航摄像片与像片平面图的区别:
S
f a b cd
p
课题1 DOM的基本理论与实 践
S
a b cd
f
f
p
H
B A
D C
FA
B
C
D
F
E
E
a0
b0
c0 d 0
f0
a0
b0
c0 d 0
f0
a0b0 c0b0 ?c0?d0 ? d0 f0 H
ab cb cd df f
a0b0 c0b0 c0d0 d0 f0 H ab cb cd df f
第三步:正射影像镶嵌及检查
课题1 DOM的基本理论与实 践
在VirtuoZo NT主界面中,单击镶嵌,选择设置,在“多影像模型”对话框
中,勾选拼接选项中的正射影像,然后选择VirtuoZo NT主界面中的镶嵌下
的自动镶嵌,系统按“多影像模型”对话框中设置的参数,自动进行正射
Hale Waihona Puke 影像镶嵌处理。课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
像片纠正的实质是对原始的航摄像片进行处理,即用某 些光学投影的仪器进行投影变换,使变换后得到的影像相 当于摄影仪物镜光轴在铅垂位置时摄取的水平像片,同时 改化至规定的比例尺或应用计算机按相应的数学关系式进 行结算,从原始非正像的数字影像获取数字正射影像的作 业过程。
DOM的制作是基于DEM,采用反解法进行数字微分纠正而制作。过程是全 自动的。
在VirtuoZo NT主界面中,选择设置菜单中正射影像参数,进行DEM格网间 隔设置和正射影像分辨率设置。 第一步:生成DOM
DEM建立后,就可以生成DOM了。 在VirtuoZo NT主界面中,单击产 品主菜单,选择生成正射影像, 系统自动生成当前模型的正射影 像,正射影像的文件为***.orl(左 影像的正射影像文件)和***.orr (右影像的正射影像文件)。
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
五、摄影测量的发展
模拟摄影测量 1900 - 70s
解析摄影测量 1960s -- 90s
数字摄影测量 1980s -- Now
Click to edit title style
ThemeGallery is a Design Digital Content & Contents mall developed by Guild Design Inc.
• 由纠正后的像点坐标(X,Y)反求其在原始影像上的像点坐 标(x,y),称为间接解法。
•
X = x(x,y) ; Y = y(x,y) (2)
• 由原始图象上的像点坐标(x,y)解求其在纠正影像上的相 应点坐标(X,Y),称为直接解法。
课题1 DOM的基本理论与实 践
已知像片的内、外方位元素,从已知DEM中获得地面点 的高程。
数字微分纠正
图像匀色处理
图幅镶嵌
图幅镶嵌
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
数字摄影测量软件DOM生产流程
内 定 向
相 对 定 向
绝 对 定 向
生 成 D E
M
生 成 D O M
质 量 检 查 、 整 饰
识别框 标
自动
人工选取控 制点
自动
课题1 DOM的基本理论与实 践
课题1 DOM的基本理论与实 践
数字微分纠正原理
• 数字微分纠正:按原始影像与纠正影像间存在的映射关系, 实现两个二维图象间的几何变换。
• 设:任意像元在原始影象中的坐标为(x,y),在纠正后 的影象中的坐标为(X,Y)。二者间存在映射关系:
•
x = fx(X,Y) ; y = fy(X,Y) (1)
纠正后的像片仍是中心投影,因此只能消除像片倾斜引 起的像点位移,不能消除地形起伏产生的投影差,理论上 只有平坦地区的航摄像片才适合使用。