伺服电动缸 - 行星滚柱丝杠,扬州众孚传动科技有限公司
伺服电动缸 - 行星滚柱丝杠,扬州众孚传动科技有限公司

120 200 400 800
150 250 500 1000
2500
1:1 / 2:1
有/无
前法兰
后法兰
耳轴
侧面安装
尾铰
外螺纹
内螺纹
杆端球铰
U型铰接
44.0 150 460 460
300mm 导程累积误差(mm)
0.018
重复定位精度(mm)
0.01
轴向间隙(mm)
0.01
最大加速度(m/s2) 5
所有型号的I系列电动缸都采用了这种滚柱丝杠技术(Roller Screw Technology)并可由多种外配的低 成本电机驱动,是一种性价比极高的电动缸产品。
两个不同性能产品系列:IX和IM
I系列电动缸提供两种不同机械性能等级的产品:IX系列和IM系列。您可以根据实际应用需求和费用预 算选择合适的产品。
1500
1800
1:1/2:1
有/无
前法兰
后法兰
耳轴
侧面安装
尾铰
外螺纹
内螺纹
杆端球铰
U型铰接
5.0 10.0 10.0 7.0 15 25 11 28 20 57 45 42
300mm 导程累积误差(mm)
0.018
重复定位精度(mm)
0.01
轴向间隙(mm)
0.01
最大加速度(m/s2)
4 4 6 6 4 8 6 84 8
FF = 安装方式 FF = 前法兰 RF = 后法兰 S1 = 单侧法兰
05 = 5mm
S2 = 两侧法兰
10 = 10mm
T = 耳轴
16 = 16mm
C1 = 单片尾铰
20 = 20mm
中铠行星滚柱丝杠(常州)有限公司介绍企业发展分析报告模板

Enterprise Development专业品质权威Analysis Report企业发展分析报告中铠行星滚柱丝杠(常州)有限公司免责声明:本报告通过对该企业公开数据进行分析生成,并不完全代表我方对该企业的意见,如有错误请及时联系;本报告出于对企业发展研究目的产生,仅供参考,在任何情况下,使用本报告所引起的一切后果,我方不承担任何责任:本报告不得用于一切商业用途,如需引用或合作,请与我方联系:中铠行星滚柱丝杠(常州)有限公司1企业发展分析结果1.1 企业发展指数得分企业发展指数得分中铠行星滚柱丝杠(常州)有限公司综合得分说明:企业发展指数根据企业规模、企业创新、企业风险、企业活力四个维度对企业发展情况进行评价。
该企业的综合评价得分需要您得到该公司授权后,我们将协助您分析给出。
1.2 企业画像类别内容行业空资质增值税一般纳税人产品服务丝杠、传动机械零部件、电动缸、机电设备研发1.3 发展历程2工商2.1工商信息2.2工商变更2.3股东结构2.4主要人员2.5分支机构2.6对外投资2.7企业年报2.8股权出质2.9动产抵押2.10司法协助2.11清算2.12注销3投融资3.1融资历史3.2投资事件3.3核心团队3.4企业业务4企业信用4.1企业信用4.2行政许可-工商局4.3行政处罚-信用中国4.4行政处罚-工商局4.5税务评级4.6税务处罚4.7经营异常4.8经营异常-工商局4.9采购不良行为4.10产品抽查4.11产品抽查-工商局4.12欠税公告4.13环保处罚4.14被执行人5司法文书5.1法律诉讼(当事人)5.2法律诉讼(相关人)5.3开庭公告5.4被执行人5.5法院公告5.6破产暂无破产数据6企业资质6.1资质许可6.2人员资质6.3产品许可6.4特殊许可7知识产权7.1商标7.2专利7.3软件著作权7.4作品著作权7.5网站备案7.6应用APP7.7微信公众号8招标中标8.1政府招标8.2政府中标8.3央企招标8.4央企中标9标准9.1国家标准9.2行业标准9.3团体标准9.4地方标准10成果奖励10.1国家奖励10.2省部奖励10.3社会奖励10.4科技成果11土地11.1大块土地出让11.2出让公告11.3土地抵押11.4地块公示11.5大企业购地11.6土地出租11.7土地结果11.8土地转让12基金12.1国家自然基金12.2国家自然基金成果12.3国家社科基金13招聘13.1招聘信息感谢阅读:感谢您耐心地阅读这份企业调查分析报告。
基于行星滚柱丝杆副的电动加载机构设计

基于行星滚柱丝杆副的电动加载机构设计电动加载机构是一种用电动机驱动的装置,用于在机械系统中施加负载,以测试和验证机械系统的性能和稳定性。
行星滚柱丝杆副是一种常用的传动装置,具有紧凑结构、高效率和高承载能力。
本篇文章将详细介绍基于行星滚柱丝杆副的电动加载机构的设计。
首先,我们需要设计整个加载机构的结构。
加载机构主要由行星滚柱丝杆副、电动机、负载臂和传感器组成。
行星滚柱丝杆副将电动机的旋转运动转化为加载臂的线性运动,并通过负载臂将负载施加到被测系统上。
传感器用于测量被测系统受力和位移等参数。
在设计行星滚柱丝杆副时,需要考虑到加载机构的承载能力和传动效率。
行星滚柱丝杆副具有较高的承载能力和刚性,适用于加载机构的设计。
根据负载要求和速度要求,选择适当的行星滚柱丝杆副的规格和型号。
接下来,确定电动机的选择。
电动机的功率和转速应根据负载要求和行星滚柱丝杆副的传动比来确定。
选择合适的电动机可以提高加载机构的性能和效率。
在设计负载臂时,需要考虑到负载的大小和形状。
负载臂应具有足够的刚性和强度,以保证负载的稳定施加,并尽量减小负载臂自身的振动和变形。
最后,设计传感器系统。
传感器可以通过测量被测系统的力、位置以及其它参数来反馈给加载机构,以便实现自动控制和监测。
选择合适的传感器类型和位置,以确保测量结果的准确性和稳定性。
总之,基于行星滚柱丝杆副的电动加载机构设计需要综合考虑结构的合理性、传动效率、承载能力、动态响应等因素。
通过合理选择和设计各个组成部分,可以实现高效、稳定和可靠的加载机构,用于测试和验证机械系统的性能。
DG系列电动推杆简介
DG系列电动推杆描述电动推杆(LINEAR ACTUATOR),又称推杆电机、电动缸、线性致动器,早在上世纪80年代初期,我国的工业生产就引进了国外的类似产品,当时主要应用在钢铁企业和发电厂企业。
随着工业制造技术的发展,工业产品不断的更新和适应着环境要求的广泛,机械设备的性能机构设计也越来越先进。
DG 系列电动推杆具备节能、灵活方便、设计新颖、产品精致、体积小、精度高、完全同步、自锁性能好、可靠性高、动作灵敏、运行平稳、推拉力相同、环境适应性好、电机直接驱动,不需要管道的气源和油路的特点。
现已大量用于生产线、汽车、军工、舞台、纺织、污水处理、家居等各类行业设备设施上。
广泛应用与煤炭、船舶、环保、航天、航空、国防、电力、机械、冶金、交通、矿山、石油、化工、起重、运输、建筑、新能源等行业。
一.DG系列电动推杆原理与构成1.电动推杆的工作原理:电机通过减速后带动丝杠副(丝杠副由丝杠和螺母组成—),电机的旋转运动通过丝杠副变成直线运动,利用电机正反转完成推杆的往返动作。
通过改变电机及丝杠副的参数,可以改变推杆的运行参数。
因此,电动推杆主要有三个参数:推拉力(N);行程(mm);运行速度(mm/s)。
2.电动推杆的基本组成:驱动电机、减速器、丝杠副、导筒、推杆、轴承座、外壳、行程测量开关及电器控制部分。
3.电动推杆的结构形式:电机与推杆垂直、电机与推杆平行、电机与推杆同轴。
4.电动推杆的性能参数指标1).推力范围:50N ~ 500KN2).行程范围:20mm ~ 5000mm3).运行速度范围:0.1mm/s ~ 1000mm/s5.电机驱动:直流电机、交流电机、步进电机、伺服电机、气动马达、液压马达。
6.丝杠副形式:梯形丝杠副、滚珠丝杠副、行星滚柱丝杠副。
电动推杆的控制1.行程测量:电动推杆的结构机械,设计可以通过各类传感器进行行程的测量,获取行程信号后达到电动推杆行程的监控目的——触点开关、感应开关、编码器、电位计。
行星滚柱丝杠副刚度及效率的分析与研究

华中科技大学硕士学位论文行星滚柱丝杠副刚度及效率的分析与研究姓名:韦振兴申请学位级别:硕士专业:机械设计及理论指导教师:杨家军2011华 中 科 技 大 学 硕 士 学 位 论 文 摘要行星滚柱丝杠副以其高速、重载、效率高、工作寿命长等特点,被广泛的应用到各种精密直线传动及大推力传动的场合,将逐步代替滚珠丝杠成为高精重载直线传动的首选零部件。
但是由于国内对行星滚柱丝杠副的研制尚处于起步阶段,很多基础理论还不完善,本文主要针对行星滚柱丝杠副的刚度、摩擦力及效率等性能进行分析,并对其主要影响因素进行了探讨,为产品结构优化设计及系列化研制提供了理论基础。
本文首先分别采用赫兹理论和分形理论对行星滚柱丝杠副的接触变形进行了数学建模及数值分析计算,并对两种理论的计算结果进行了对比;其次在考虑丝杠的扭转变形与轴向拉压变形、丝杠副组件的轴向拉压变形、接触变形、螺纹变形等因素的情况下,对行星滚柱丝杠副的载荷分布进行了数学建模及计算,并对其轴向静刚度进行了分析计算,同时对影响轴向静刚度的各种因素如预紧力的施加方式及大小、螺旋升角、接触角等进行了分析;然后对行星滚柱丝杠副的摩擦力产生机理进行了研究,同时对其影响因素如预紧载荷、加工制造误差、润滑特性等进行了探讨,最后对其效率进行了数学建模及计算,同时对其主要影响因素如螺旋升角、接触角等进行了分析。
本文的创新点在于:应用分形理论实现对行星滚柱丝杠副接触刚度的数学建模与分析计算,并与基于赫兹理论的接触刚度模型计算结果进行了对比;对行星滚柱丝杠副的轴向静刚度、摩擦力及效率分别进行了数学建模及数值计算,并对其影响因素进行了探讨。
本文的研究成果为行星滚柱丝杠副的结构优化分析、产品研制及应用提供了一定的理论基础与借鉴价值,为行星滚柱丝杠副的基础理论深入研究奠定了基础。
关键词:行星滚柱丝杠赫兹接触分形理论轴向静刚度摩擦力效率华 中 科 技 大 学 硕 士 学 位 论 文 AbstractPlanetary roller screw with its characteristics of high speed、overloading、high efficiency、long life and so on, has been widely applied to a variety of the occasion of precision transmission linear and high-thrust, gradually has been the first choice of heavy and high precision line-transmission parts instead of ball screw. However, due to the basic theory of the Planetary roller screw was still in the initial stage in the domestic, and there weren’t appropriate theoretical basis and c alculation model on the importent performance indicators such as stiffness、friction、efficiency and so on. This paper mainly analyzed on these performance, and then studied on its main influencing factors. These all provides a good theoretical basis for the structure optimization and research and development of products of the planetary roller screw.Firstly, This paper built the mathematical model and numerical analysised on the contact deformation of the planetary roller screw followed by the Hertz theory and Fractal theory, and then the computing result were compared; Secondly, taken into consideration the factors of the torsional and axial tension and compression deformation of the screw, the axial tension and compression deformation、contacting deformation、thread deformation of the vice assembly, the mathematical model of load distribution for the planetary roller screw have been built and calculated, and then the axial static stiffness were analyzed and calculated, the influencing factors of the the axial static stiffness such as the manner and size of the preload、helix angle、contacting angle and so on were discussed and analyzed simultaneously; Then the generation mechanism of the f riction for planetary roller screw, and the influencing factors such as preload、Processing error、Lubrication characteristics and so on were discussed and analyzed simultaneously; Lastly, the mathematical model of efficiency were built and calculated, the influencing factors such as helix angle、contacting angle were analyzed.The innovation is that as followed:built the mathematical modeling of the contact stiffness f or planetary roller screw with the fractal theory, and then compared with the hertz theory. Then built numerical molding of the axial static stiffness、friction and efficiency for the planetary roller screw, and the influencing factors were analyzed and discussed. The result of the research provided a basis theory and reference value for the structure optimization, products research & development and application, and also laied a certain foundation for the华 中 科 技 大 学 硕 士 学 位 论 文 further basic theory research of planetary roller screw.Keywords: Planetary roller screw Hertz contact theory Fractal Theory Axial static stiffness Friction Efficiency华 中 科 技 大 学 硕 士 学 位 论 文 独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
【CN209511044U】行星滚柱丝杠【专利】

柱丝杠包括 :丝杆 ,丝杆的 外 周设置有沿 周向 延 伸的第一沟槽,第一沟槽形成为在丝杆的周向上 闭合的环状;轴套,轴套套设于丝杆,轴套的内表 面设置有多条沿螺旋线方向延伸的第二沟槽,第 一 沟槽 和第二 沟槽交叉 ;以 及多个滚柱 ,滚柱的 外周设置有多条凸牙,每条凸牙形成为在滚柱的 周向上闭合的环状,凸牙嵌入第一沟槽和第二沟 槽的交叉位置。采用上述技术方案的行星滚柱丝 杠在行星滚柱丝杠工作过程中 ,凸牙在环状闭合 的第一沟槽内运动,使滚柱相对于丝杆的轴向位 置固定 ,使行星滚柱丝杠既 可以 承载 力大 ,传动 位置精度高 ,同时还可以振动小和噪音小,运行 平顺。
权利要求书1页 说明书6页 附图7页
CN 209511044 U
CN 209511044 U
权 利 要 求 书
1/1 页
1 .一种行星滚柱丝杠,其特征在于,所述行星滚柱丝杠包括: 丝杆 ,所述丝杆的 外 周设置有沿 周向 延 伸的 第一 沟槽 ,所述 第一 沟槽形成为在所述丝 杆的周向上闭合的环状; 轴套 ,所述 轴套套设于所述丝杆 ,所述 轴套的内 表面设置有多条沿螺旋线方向 延 伸的 第二沟槽,所述第一沟槽和所述第二沟槽交叉;以及 多个滚柱 ,所述多个滚柱位于所述丝杆 和所述 轴套之间 ,所述滚柱的 外 周设置有多条 凸牙 ,每条所述凸牙形成为在所述滚柱的 周向上闭 合的 环状 ,所述凸牙嵌入所述第一沟槽 和所述第二沟槽的交叉位置。 2 .根据权利要求1所述的行星滚柱丝杠,其特征在于,所述丝杆的外周面设置有第一啮 合部 ,所述滚柱的 外 周面设置有第二啮合部 ,通过所述第一啮合部 和所述第二啮合部配合 使所述滚柱在所述丝杆的外周面上做纯滚动。 3 .根据权利要求2所述的行星滚柱丝杠,其特征在于,所述第一啮合部和所述第二啮合 部为直齿状,所述第二啮合部形成于所述滚柱的轴向两端处的所述凸牙。 4 .根据权利要求1所述的行星滚柱丝杠,其特征在于,所述第一沟槽所在的平面与所述 丝杆的 轴向是垂直的 ,所述凸牙所在的平面与所述滚柱的 轴向是垂直的。 5 .根据权利要求1所述的行星滚柱丝杠,其特征在于,全部或部分的所述第一沟槽中嵌 入所述凸牙;并且/或者, 全部或部分的所述第二沟槽中嵌入所述凸牙。 6 .根据权利要求1所述的行星滚柱丝杠,其特征在于,多条所述第一沟槽中任意两条相 邻的所述第一沟槽之间具有相同或不同的距离。 7 .根据权利要求1所述的行星滚柱丝杠,其特征在于,所述第一沟槽所占据的所述丝杆 的 轴向长度小于所述第二沟槽所占 据的所述轴套的 轴向长度。 8 .根据权利要求1所述的行星滚柱丝杠,其特征在于,两个相邻的所述凸牙之间的距离 是两个相邻的所述第一沟槽之间距离和/或所述第二沟槽的螺距的整数倍。 9 .根据权利要求1所述的行星滚柱丝杠,其特征在于,在所述行星滚柱丝杠工作过程 中,所述凸牙嵌入闭合环状的所述第一沟槽,所述滚柱相对于所述丝杆的轴向位置固定。 10 .根据权利要求1所述的行星滚柱丝杠,其特征在于,所述行星滚柱丝杠不设置使所 述滚柱复位的复位装置。 11 .根据权利要求1所述的行星滚柱丝杠,其特征在于,所述第一沟槽的沿垂直于所述 第一沟槽的延伸方向的平面的截面为三角形,所述第二沟槽的沿垂直于所述第二沟槽的延 伸方向的平面的截面为三角形,所述凸牙沿垂直于所述凸牙的延伸方向的平面的截面为三 角形。 12 .根据权利要求1所述的行星滚柱丝杠,其特征在于,所述行星滚柱丝杠还包括保持 架,在所述行星滚柱丝杠的径向上,所述保持架设置于所述丝杆和所述轴套之间,所述保持 架设置有用于容纳所述滚柱的定位槽。
电动缸样本0704

60 64 44 24 147 82
83
WEC090 M10X20 ф60h7
90
94 70 42 218 118 10 3
WEC120 M12X20 ф80h7 120 124 93 54 275 160
4
WEC160 M16X25 ф100h7 160 164 120 72 350 180
轴最大直径
Ф16 Ф16 Ф24
Ф24 Ф35
Ф35
Ф45
Ф45
轴最大长度
55
55
65
65
80
80
116
116
联轴器
GS14
GS19
GS24,28,
GS38,42,
GS19
GS24
38
48
注:超出以上尺寸限制,按特殊定制处理,需要增加费用,应与设计人员商议是否可行。
4
天津维杰泰克自动化技术有限公司
滑 直联 动 并联
WEC060
B05 B10
60X60
16
5
10
Tr16x4
0.3 0.3
100 51
1000 500 300
3.2kg 6.7kg
单位:毫米;毫米/秒;公斤
WEC090
WEC120
WEC160
B05 B10 B25 B05 B10 B20 B40 B05 B10 B20 B40,B50
主要特性
铝合金外壳:60X60、90X90、120X120、160X160 不锈钢或电镀推杆 丝杠:滚动丝杠或滑动丝杠 导向:防旋转导轮 推力轴承 防尘密封 限位/回零传感器:磁性霍尔 可选电机: 直流伺服电机、交流伺服电机、步进电机、 普通交/直流电机、减速电机等 最大推力 5000 公斤 运动行程 50-2500mm 最高速度 1500mm/s 单向重复定位精度±0.02mm;可选高精度
行星滚柱丝杠汇总
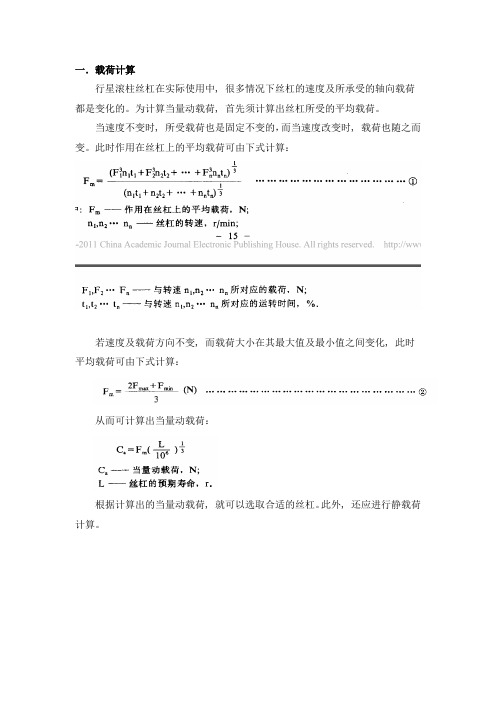
一.载荷计算行星滚柱丝杠在实际使用中, 很多情况下丝杠的速度及所承受的轴向载荷都是变化的。
为计算当量动载荷, 首先须计算出丝杠所受的平均载荷。
当速度不变时, 所受载荷也是固定不变的,而当速度改变时, 载荷也随之而变。
此时作用在丝杠上的平均载荷可由下式计算:若速度及载荷方向不变, 而载荷大小在其最大值及最小值之间变化, 此时平均载荷可由下式计算:从而可计算出当量动载荷:根据计算出的当量动载荷, 就可以选取合适的丝杠。
此外, 还应进行静载荷计算。
二.驱动力矩丝杠加速时所需总的驱动力矩可由下式计算:行星滚柱丝杠的效率取决于其工作条件:它在任何条件下都不会自锁, 丝杠和螺母都可以作为主动件,因此,其效率有正效率,将旋转运动变为直线运动,和逆效率 直线运动,变为旋转运动, 其计算公式如下:三.临界速度行星滚柱丝杠的临界转速由下式计算:高速切削技术在我国尚处于起步阶段, 行星滚柱丝杠作为一种新型的高效丝杠将会逐步得到实际应用。
.------- 【一种新型的高速进给传动机构--行星滚柱丝杠】滚柱丝杠副具有较大接触半径的滚动体(图1, R 可看作为等效滚珠半径) , 这样在导程小到只有1 或2mm 时仍可获得很高的承载能力(约为滚珠丝杠副的20 倍) ,并且强度高, 可靠性好。
此外, 和滚珠丝杠副相比, 行星式滚柱丝杠副还具有寿命长、振动小、噪声低、螺母和螺杆易分离等优点行星式滚柱丝杠副的工作原理是螺杆转动, 推动滚柱沿螺杆和螺母组成的滚道作行星式运动。
当将螺杆、滚柱和螺母的接触半径及头数控制到一定的数值时, 螺母与滚柱在轴向近似无相对运动, 螺母与滚柱同步地沿螺杆的轴线运动。
滚柱与螺杆及螺母的接触为点接触, 滚柱两端有外齿轮; 内齿环4 安装于螺母的两端, 与滚柱两端的齿轮相啮合。
这两个齿轮副的啮合保证螺母与滚柱协调工作, 减小导向螺杆的滑动, 保持滚柱工作时的一致性; 导环5 保证各滚柱间有相同的间距, 避免相互间摩擦, 改善受力状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
两个不同性能产品系列:IX和IM
I系列电动缸提供两种不同机械性能等级的产品:IX系列和IM系列。您可以根据实际应用需求和费用预 算选择合适的产品。
IX与IM的主要区别在于行程寿命指标不同:IX的行程寿命是滚柱丝杠机构的15倍,而IM的行程寿命是 滚柱丝杠的5掊。
I系列性能特点
采用EXLAR拥有专利的滚柱丝杠技术;灵活的安装方式;可选配多种类型、多种品牌的电机驱动;可选配内 置行星齿轮减速器,适应大推力输出。
IX系列性能特点
防护等级:P65采用滚柱丝杠,寿命是滚珠丝杠的15倍更低的反向间隙。
G10 = 10:1
SM = 西门子
G20 = 20:1
SN = 施耐德
GXX = 特殊
PH = 菲仕
AB = AB
KM = 科尔摩根
MT = 三菱
OM = 欧姆龙
PS = 松下
YS = 安川
FT = 富士通
XX = 特殊 ZZ = 限位开关
L1 = 1个 = 特殊
03
平行式电动缸
平行式电动缸的电机与缸体部分平行安装,通过同 步带及同步带轮与电动缸的传动丝杆相连接,除具有直 线式电动缸的特点外,并由于总长短,在安装位置比较 小的场合比较适应。同时平行式电动缸选用的同步带, 具有强度高、间隙小、寿命长等特点,使整个电动缸具 有较高的控制性和控制精度。
01
伺服电动缸
0.8
1.2
2
注:1、可以选择其他规格的导程。 3、可以选择无轴向间隙。
2、可以选择其他减速比或者加装精密行星齿轮减速器。
05
伺服电动缸
伺服电动缸性能指标(续)
产品型号
丝杆导程(mm)
5
额定出力(kN)
20
最大出力(kN)
45
额定速度(mm/s) 125
最高速度(mm/s) 160
最大行程(mm)
伺服电动缸从外形结构上可分为两种:直线式、平行式。 直线式电动缸
直线式电动缸集成了伺服电机、伺服驱动器、高精 度滚珠丝杆或行星滚柱丝杠、模块华设计等技术,整 个电动缸结构紧凑。伺服电机与电动缸的传动丝杆通过 特殊联轴器相连接,使伺服电机的编码器直接反馈电动 缸的活塞杆位移量,减少了中间环节的惯量和间隙,提 高了控制性和控制精度。伺服电机与电动缸整体相连, 安装容易、设定简单。电动缸的主要零部件均采用国内 外优质产品,性能稳定、故障率低、可靠性高。
减速比
内部防转机构
安装方式
活塞杆端连接方式 丝杆额定动载(kN) 41
TB04 系列 10 20 60 60 100 100 250 500 330 660
2000
110 110
50 20 60 1250 1660
32.5
TB05 系列
6
10 20
40
30 100 150 150
60 200 200 200
电机输出扭矩与电动缸输出力的关系
F = T*η*2π*R/P
式中: F=电动缸输出力,单位:kN T=电机输出扭矩,单位:Nm R=减速比 P=丝杆导程,单位:mm η=效率(一般选择电动缸的总效率为85%,实际效率与工况有关)
寿命计算
伺服电动缸的预期寿命L定义为:正确维护的使用条件下,90%的丝杠在疲劳失效前可达到或 超过的行程寿命。行程寿命计算值的单位是Km。行程寿命的计算值的前提条件是在丝杠得到正确 的维护,丝杠有受杂质污染,并得到适合的润滑。如果要保证大于90%的行程寿命可靠性,预期 寿命乘以以下系数:95%×0.62、96%×0.53、97%×0.44、98%×0.33、99%×0.21 伺服电动缸的预期行程寿命计算公式为:
同步带 额定转速 /行星 3000rpm时 减速比 伸缩速度
(mm/s)
7KN
驱动 伺服电 扭矩 机功率 (Nm) (kW)
电动缸实际负载(KN)
5KN
3KN
1KN
0.5KN
驱动 伺服电 驱动 伺服电 驱动 伺服电 驱动 伺服电 扭矩 机功率 扭矩 机功率 扭矩 机功率 扭矩 机功率 (Nm) (kW) (Nm) (kW) (Nm) (kW) (Nm) (kW)
88
防护等级
IP65
限位开关
有/无
缸体基本重量(kg) (直线式)
2.5 2.5 2.6 3.0 3.5 3.8 3.5 3.8 6.0 6.5 6.0 6.6
缸体基本重量(kg) 3.5 3.5 3.6 4.0 5 5.3 5 5.3 10.0 10.5 10.0 10.6 (平形式)
每100mm 行程重量(kg)
伺服电动缸
300
26
伺服电动缸
I系列直线电动缸
扬州众孚的TI系列电动缸为客户提供了一种全新直线运动解决方案。具有行星滚柱丝杠技术的所有优点 ,提供非常灵活的安装方式,并可选用多种电机驱动。Exlar的滚柱丝杠技术(Roller Screw Technology) 是性能可靠、寿命超长的电动缸所采用的一项关键技术。15年来,EXAR的反向滚柱丝杠电动缸已在成千上万 个应用中,成为液压、气动机构的长寿中,成为液压、气动机构的长寿命、全电动升级换代产品。
伺服电动缸特性:闭环伺服控制,控制精度达到0.01mm;精密控制推力,增加压力传感器, 控制精度可达1%;易于与PLC等控制系统连接,实现高精密运动控制。
伺服电动缸优点:节能,干净无污染;低噪音、低摩擦和低速平稳性良好,优异的控制性和 稳定性;安装、使用方便,低维护成本,对维护人员没有太高的技术要求;采用先进的模块化设 计方法,供货期短,结构紧凑、外形尺寸较小;高响应、高性能、可靠性高、低惯量设计,重复 定位精度高;工作寿命长,可频繁启停;环境适应性好(低温、高温、海上、防水、防爆等各种 环境)。
L=(C/K)3×P
式中: C=丝杠额定动载荷,单位:KN K=电动缸承受的平均载荷,单位:KN P=丝杆导程,单位:mm L=伺服电动缸行程寿命计算值,单位:km
02
伺服电动缸
选型说明:
TB0A-BB-CCCC-DDDD-EEE-FF-G-XX-YY-ZZ
A = 系列号 1、2、3、4、5、6
BB = 丝杆导程 04 = 4mm
SU = 不锈钢
F10 = 平形式1:1
LT = 低温规格
F15 = 平形式1.5:1
HT = 高温规格
F20 = 平形式2:1
ZK = 真空
FXX = 特殊 EEE=减速比
G03 = 3:1
XX = 特殊 YY = 电机品牌
LZ = 伦茨
G05 = 5:1
PF = 倍福
G07 = 7:1
SW = SEW
IM系列特点
防护等级:P54,采用滚柱丝杠,寿命是滚珠丝杠的5倍标准反向间隙。
27
公司简介
INTRODUCTION
扬州众孚传动科技有限公司(江苏仲孚精密 传动机械有限公司)是全球极少数具有设计、制 造全系列行星滚柱丝杠的科技型企业,拥有自主 知识产权。公司致力于丝杠及衍生产品的研发与 生产,其主要产品有:行星滚柱丝杠、伺服电动 缸、直驱线控启闭机、结晶器窄边调整装置、重 载电动推杆、螺旋升降机、非线性电动振动缸等 产品。
10
10
8
5
10
10
10
防护等级
IP65
限位开关
有/无
缸体基本重量(kg)
12
14
15
17
25
27
27
30
(直线式)
缸体基本重量(kg) 27
29
30
32
50
52
52
55
(平形式)
每100mm 行程
5
13
重量(kg)
注:1、可以选择其他规格的导程。 2、可以选择其他减速比或者加装精密行星齿轮减速器。 3、可以选择无轴向间隙。
FF = 安装方式 FF = 前法兰 RF = 后法兰 S1 = 单侧法兰
05 = 5mm
S2 = 两侧法兰
10 = 10mm
T = 耳轴
16 = 16mm
C1 = 单片尾铰
20 = 20mm
C2 = 双片尾铰
25 = 25mm
RJ = 尾部关节轴承
32 = 32mm 40 = 40mm 50 = 50mm CCCC = 行程 50 = 50mm
XX = 特殊 G = 活塞杆头形式
A = 外螺纹 B = 内螺纹 J = 杆端轴承
100 = 100mm
U = U形铰链
200 = 200mm
F = 法兰
300 = 300mm …
DDDD=类型 I10 = 直线式1:1
X = 特殊 XX = 其他
AR = 防转 PF = 预紧 PB = 防尘罩
IXX = 特殊
TB06 系列 10 20 40 200 350 350 400 500 500 130 260 530 165 330 660
3000
320 610 610
8
10
10
40 45 45 70 75 75
17
06
伺服电动缸
伺服电动缸 TB01 系列驱动扭矩与功率选型表
导程 型号 (mm)
类型
伺服电机
1500
1800
1:1/2:1
有/无
前法兰
后法兰
耳轴
侧面安装
尾铰
外螺纹
内螺纹
杆端球铰
U型铰接
5.0 10.0 10.0 7.0 15 25 11 28 20 57 45 42