螺旋轮式管道机器人设计及其制作
螺旋轮式小型管道机器人控制系统的设计

第】4卷第1期2014年3月上海应用技术学院学报(自然科学版)J()U R N A L oF SH A N G H A I I N ST I T U T E()F T E C H N o L oG Y(N A T U R A L SC I E N C E)文章编号:1671—7333(2014)01一0037—04V o l|14N o.1M ar.2014D O I:10.3969/j.i ssn.1671—7333.2014.01.009螺旋轮式小型管道机器人控制系统的设计刘彩霞,龚德利(上海应用技术学院机械工程学院,上海201418)摘要:作业管径小于80m m的小型管道机器人广泛应用于化工、制冷、核电站等领域的检测、维修,其移动结构及信号采集和处理技术具有较高的实用价值和学术意义.采用螺旋轮式结构设计了内径为移60m m的小型管道机器人,其原理简单、结构紧凑、控制方便.螺旋轮式移动的主体结构,确保管道机器人具有较大的牵引力和移动速度.管道机器人在管道内的数据信号,由搭栽在微型管道机器人的移动结构上的D ST J一3000智能差压压力传感器采集传送到C8051F330单片机,通过无线蓝牙数传模块,将数据传输到上位机,利用V i s ual B as i c程序软件实现计算机对管道机器人的控制.螺旋轮式小型管道机器人控制系统能够自由控制前进、后退、调速、自锁等,其动作状态数据也可利用上住机软件显示或打印.关键词:螺旋轮;小型管道机器人;智能差压压力传感器;单片机;控制系统中图分类号:T P242.3文献标志码:AD eSj gn O f C O nt r O I Syst em f O r SC r ewW heeI Sm aI I I n—pO pe R O bO tL儿,厂C ni—zi n,G O N G D e—Zi(S c h001of M echani cal E ngi neeri ng,Shanghai I ns t i t ut e of T echnol ogy,Shanghai201418,C hi na)A bs t r act:The s m a l l r obot i n pi pel i nes w i t h di a m et er s l es s t han80m m i s w i de l y us ed i n t he i ndus t r i al i n—s pect i on,m ai nt enance,and cl eani ng of pe t r ochem i ca l,r e f r i ge r at i on and nuc l e ar pow er pl ant s.T he m obi l e m echani s m,dat a acq ui s i t i on and pr oces s i ng t echn0109y of m i cr o i n—pi pe r obot have hi gh pr act i ca l val ue and academ i c s i gni fi cance.B as ed on t he s pi r al w heel s t r uc t ur e,a60m mdi a m et er i n—pi pe r obot w i t h t he advan—t a ges。
管道内部传输机器人的研究与制造
管道内部传输机器人的研究与制造I. 介绍管道内部传输机器人是指一种能够在管道内部进行自主行动的机器人。
该机器人是由传感器、执行器、控制系统等设备组成,通过在管道内部传输不同的物品或进行检修和维护等任务。
管道内部传输机器人在各个行业都有广泛的应用,特别是在石油、天然气、水处理等领域。
II. 设计与构造管道内部传输机器人的设计和构造比较复杂,一般需要根据具体的管道参数和使用要求进行设计。
该机器人的主要部件包括:轮组、电池、传感器、控制模块等。
1. 轮组设计机器人传输管道内部时需要具备一定的机动性和灵活性。
轮组是机器人的运动基础,也是移动灵活性的关键。
常见的轮组类型包括:链式履带式、摩擦轮式、气囊轮式等。
2. 电池设计电池为机器人提供能量,保证机器人持续工作。
电池的容量和类型需根据机器人工作负荷确定,同时需要满足安全、轻便等要求。
3. 传感器设计传感器是机器人进行感知和自主行动的核心。
在管道内部工作时,需要采用一定的传感技术保证机器人的安全和稳定性。
常见的传感器类型包括:红外传感器、多点温度传感器、压力传感器、光纤传感器等。
4. 控制模块设计控制模块是机器人的大脑,决定了机器人的行为和决策。
控制模块一般由多种控制算法相结合,以保证机器人自主行动的稳定和安全。
III. 应用领域管道内部传输机器人在各个行业中都有广泛的应用。
特别是在石油、天然气、水处理等领域。
1. 石油工业石油工业是管道内部传输机器人的主要应用领域之一。
机器人在石油管道中进行检查和清扫任务,响应速度快、操作便捷,减少了操作人员的风险。
2. 天然气工业管道内部传输机器人在天然气工业中也有广泛应用,能够检查管道中的阀门和泄漏等,有助于提高天然气产量和降低安全风险。
3. 水处理工业管道内部传输机器人在水处理工业中也起到了重要的作用,能够检查管道的水质和水流量等参数,帮助相关的运营人员及时发现异常情况,保障水处理工艺的稳定性和安全性。
IV. 前景展望随着自动化技术的不断发展,管道内部传输机器人在未来将会有更广阔的应用前景。
螺旋轮式小型管道机器人及其驱动控制系统研究

螺旋轮式小型管道机器人及其驱动控制系统研究刘彩霞龚德利(上海应用技术学院机械工程学院,上海201418)摘要:作业管径小于80mm的小型管道机器人广泛应用于化工、制冷、核电站等领域的检测、维修等方面,其移动结构及信号采集和处理技术具有较高的实用价值和学术意义。
采用螺旋轮式结构设计了内径为Φ60mm的小型管道机器人,其原理简单、结构紧凑、控制方便。
螺旋轮式移动的主体结构,确保管道机器人具有较大的牵引力和移动速度。
管道机器人在管道内的数据信号,由搭载在微型管道机器人的移动结构上的智能差压压力传感器采集传送到51系列单片机,通过无线蓝牙数传模块,将数据传输到上位机,利用Visual Basic程序软件实现计算机对管道机器人的控制。
螺旋轮式小型管道机器人控制系统能够自由控制前进、后退、调速、自锁等,其动作状态数据也可利用上位机软件显示或打印。
关键词:螺旋轮;小型管道机器人;智能差压压力传感器;单片机;控制系统中图分类号:TP 242.3 文献标志码:AResearch on screw wheel small pipeline robot control systemLIU Cai-xia GONG De-li(School of Mechanical Engineering, Shanghai Institute of Technology, Shanghai 201418, China)Abstract:The small robot in pipeline diameter less than 80mm is widely used in the industrial inspection, maintenance, and cleaning of petrochemical, refrigeration and nuclear power plants. The mobile mechanism, data acquisition and processing technology of micro in-pipe robot have high practical value and academic significance. A 60mm diameter in-pipe robot with spiral wheel structure is designed, which has the advantages of simple principle, compact structure and convenient control. Its screw wheel moving structure ensures the robot has a large traction and movement speed. DSTJ-3000 intelligent differential pressure sensor is equipped with the micro in-pipe robot, which collects action data to the microcontroller C8051F330. Data is transferred to the PC through the wireless Bluetooth module, processed and displayed by Visual Basic application program. Screw wheel micro in-pipe robot control system can freely control its forward, backward, speed adjustment, and self-locking through the PC software.Key words:screw wheel; small pipeline robot; DSTJ-3000 intelligent differential pressure sensor; the microcontroller C8051F330; control system化工、制冷及核电站等相关领域,管道作为一种有效的物料输送手段应用极广。
螺旋轮式管道机器人设计及其制作
长江大学毕业论文(设计)题目名称:螺旋轮式管道机器人设计及其制作题目类型:学生姓名:周佳伟院 (系):机械学院专业班级:机械11102班指导老师:吕志鹏时间: 20154月25号~5月12号完成时间2015年5月螺旋轮式管道机器人设计及其制作摘要本设计的主要内容是螺旋推进管道机器人的组成及工作原理,对机器人的机械结构进行了设计,并且分析了其在弯管内的几何与运动约束条件。
新型的旋转体和保持体结构的设计,使此管道机器人具有较大的牵引力和移动速度。
机器人采用节段式设计,使得其具有强大的功能扩展性。
在制冷、化工、核电站等领域,采用常规方法对小型管道检测存在中毒、辐射等危险,且费时费力。
因此,小型管道机器人在细小管道检测方面具有良好的应用前景,并且其机械结构具有较高的实用价值和学术意义。
螺旋轮式管道机器人特点:轮式行走具有结构简单、行走连续平稳的特点。
关键字:管道轴螺旋推进管道机器人旋转体管道检测机械结构目录第一章绪论 (3)§1.1 机器人的定义及其组成 (3)§1.2 机器人的发展历程 (4)§1.3 机器人在各大领域的应用 (5)§1.4 螺旋轮式管道机器人 (6)第二章机器人总体方案设计 (7)§2.1设计方案过程及特点 (7)§2.2 机械结构 (7)第三章机器人系统控制 (14)第四章机器人制作过程 (16)第五章设计总结 (18)参考文献 (21)正文第一章绪论§1.1 机器人的定义及其组成1920年,捷克剧作家卡雷尔•卡佩克发表了科幻剧本《罗萨姆的万能机器人》,他在说剧本中首次提出了“机器人(Robot)”这个词,并且把机器人描绘成像人一样工作的机器,不知疲倦地工作。
自此之后,不仅“机器人(Robot)”这个词广泛的流行,而且设计制造机器人的活动也异常风行。
现在,国际上对机器人的概念已经逐渐趋近一致。
一般说来,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。
微小型螺旋驱动管道机器人建模与分析

微小型螺旋驱动管道机器人建模与
口 罗自荣
口 解旭辉
要:介绍 了基 于管道 内径为1 m的螺旋驱动 管道检 测机 器人的组成及工作原理 , 5m 分析 了其运动 力 学性 能及在
弯管内的几何约束条件。 用机械 系统动力学仿 真软件 A A , 应 D MS 建立管道机 器人的虚拟样机。 通过 计算机仿 真得 到机器人
夏 出 版 社 ,0 5 20.
日
结束语
我 国 已 经 是 一 个 工 业 大 国但 还 不 是 工 业 强 国 。 信
t nme h ns a d teg o t ec nt itn teeb w aea aye .Th ot aeADA su e ob i i u lpooy eo i c a im n h e mer o sr n lo r lzd o  ̄ a i h n esf r w MSi sd t ul avr a rttp f d t
Ab t a t Th c a im n p rt g p i cp eo er b t a e o ce t n fr i ei s e t na e p e e td.Th - sr c : eme h n s a d o ea i r il f h o o s n s rw moi p n p c i r r s n e n n t b o op o e mo
t e i— ie rb t T e rl t n l aa b t e n t eta t n f re o er b t n h a a t r f r c in wh e a eb e ban d h p p o. h ea i a t ew e h r ci c ft o o d t e p r mee so a t e l v e n o ti e n o o d o o h a t o h wi h i fc mp trs lt n S st rv h or cn s f h h o eia n l s s h sp o i i g ad sg a i rd v l t t e ad o o u e i ai Oa p o e te c re t e so et e r t l a a y e ,tu r v d n e i n b ss o e e— h mu o o t c f o me t f c os r w moi ni — i e rb t. p n r c e t p p o o s o mi o n K e o d : M ir b t yW r s c o Ro o P ps i e S r w o in ce M t o Vit a o o y e ru l Pr t t p
搭建轮式机器人实验的设计思路和实验原理
搭建轮式机器人实验的设计思路和实验原理下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!设计与实现:轮式机器人的搭建实验一、引言轮式机器人作为机器人学的基础研究对象,广泛应用于自动化、无人驾驶、家庭服务等多个领域。
螺旋轮式管道机器人的机构设计与仿真分析毕业论文
学校代码:11517学号:200806111105毕业设计题目管道机器人的机构设计与仿真分析河南工程学院论文版权使用授权书本人完全了解河南工程学院关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交论文的印刷本和电子版本;学校有权保存论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存论文;学校有权提供目录检索以及提供本论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版;在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。
论文作者签名:年月日河南工程学院毕业设计(论文)原创性声明本人郑重声明:所呈交的论文,是本人在指导教师指导下,进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文的研究成果不包含任何他人创作的、已公开发表或者没有公开发表的作品的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确方式标明。
本学位论文原创性声明的法律责任由本人承担。
论文作者签名:年月日河南工程学院毕业设计(论文)任务书题目管道机器人的机构设计与仿真分析专业机械设计制造及自动化学号 200806111105 姓名张海红主要内容、基本要求、主要参考资料等:选题背景:在核工业、石油天然气、军事装备等领域中,管道作为一种有效的物料输送手段而得到广泛应用,为了提高管道寿命,防止泄露等事故的发生,管道机器人作为高效准确的故障诊断、检测和维修手段应运而生,广泛地应用于管到的探伤、补口、维修、焊接等诸多领域。
主要内容:设计一款管道机器人的机构,对设计的机构进行动力学分析。
基本要求:建立三维模型,进行运动学分析,提交图纸,设计说明书等相关资料。
主要参考资料:机电一体化系统设计传感器技术机器人技术机构设计单片机技术应用相关科研论文10篇完成期限:指导教师签名:专业负责人签名:年月日目录中文摘要 (Ⅰ)英文摘要 (Ⅱ)1前言 (1)1.1 课题的背景与意义 (1)1.2 机器人的发展现状及趋势 (1)1.2.1 国内外管道微型机器人的发展近况 (2)1.2.2 商业领域的管道机器人 (6)1.3本课题的设计任务 (8)1.4 论文的主要内容 (8)2 螺旋轮式管道机器人的总体方案设计 (11)2.1 机器人管内运动方式对比分析 (11)2.1.1 轮式 (11)2.1.2 蠕动式 (12)2.2 螺旋轮式管道机器人的运动机理 (14)2.2.1 机构的原理 (14)2.2.2 机器人设计要点 (15)3管道机器人行走机构的分析与设计...................... 错误!未定义书签。
管道检测机器人设计
1 引言管道运输是当今五大运输方式之一,已成为油气能源运输工具。
目前,世界上石油天然气管道总长约200万km,我国长距离输送管道总长度约2万km。
国家重点工程“西气东输”工程,主干线管道(管径1118mm)全长4167km,其主管道投资384亿元,主管线和城市管网投资将突破1000亿元。
世界上约有50%的长距离运输管道要使用几十年、甚至上百年时间,这些管道大都埋在地下、海底。
由于内外介质的腐蚀、重压、地形沉降、塌陷等原因,管道不可避免地会出现损伤。
在世界管道运输史上,由于管道泄漏而发生的恶性事故触目惊心。
据不完全统计,截至1990年,国内输油管道共发生大小事故628次。
1986到2b00年期间美国天然气管道发生事故1184起,造成55人死亡、210人受伤,损失约2. 5亿美元。
因此,研究管道无损检测自动化技术,提高检测的可靠性和自动化程度,加强在建和在役运输管道的检测和监测,对提高管线运输的安全性具有重要意义。
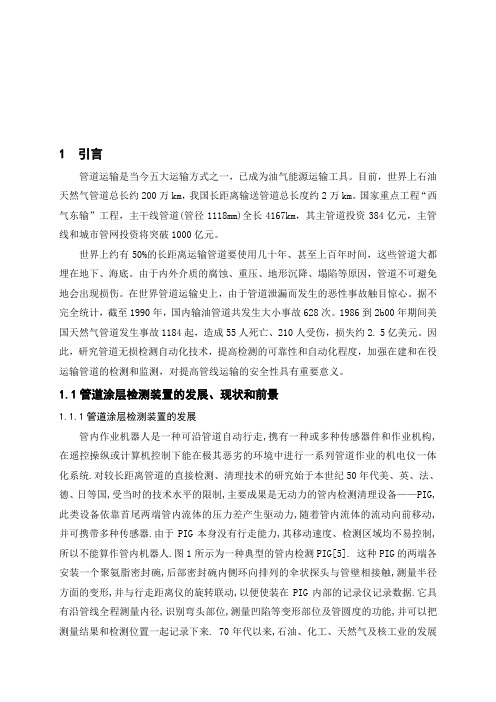
1.1管道涂层检测装置的发展、现状和前景1.1.1管道涂层检测装置的发展管内作业机器人是一种可沿管道自动行走,携有一种或多种传感器件和作业机构,在遥控操纵或计算机控制下能在极其恶劣的环境中进行一系列管道作业的机电仪一体化系统.对较长距离管道的直接检测、清理技术的研究始于本世纪50年代美、英、法、德、日等国,受当时的技术水平的限制,主要成果是无动力的管内检测清理设备——PIG,此类设备依靠首尾两端管内流体的压力差产生驱动力,随着管内流体的流动向前移动,并可携带多种传感器.由于PIG本身没有行走能力,其移动速度、检测区域均不易控制,所以不能算作管内机器人.图1所示为一种典型的管内检测PIG[5]. 这种PIG的两端各安装一个聚氨脂密封碗,后部密封碗内侧环向排列的伞状探头与管壁相接触,测量半径方面的变形,并与行走距离仪的旋转联动,以便使装在PIG内部的记录仪记录数据.它具有沿管线全程测量内径,识别弯头部位,测量凹陷等变形部位及管圆度的功能,并可以把测量结果和检测位置一起记录下来. 70年代以来,石油、化工、天然气及核工业的发展为管道机器人的应用提供了广阔而诱人的前景,而机器人学、计算机、传感器等理论和技术的发展,也为管内和管外自主移动机器人的研究和应用提供了技术保证.日、美、英、法、德等国在此方面做了大量研究工作,其中日本从事管道机器人研究的人员最多,成果也最多。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计 螺旋式管道机器人
机器人总体方案设计
1 设计方案过程及特点
按照上述的过程方案,由三维建模可以进一步确定机器人的可靠外形结构。
安装加工出的理想外形经过安装调试环节成为完整的机器人,最后完善整个样机使其在螺旋管道内能顺利工作,帮助人们顺利解决难题。
2 机械结构
一、当前状况
目前国内外已研制出的管道机器人类型很多,从机械结构来区分主要有以下几种移动方式:
(1)活塞移动式,其原理类似于活塞在汽缸内的运动,即把管道看作汽缸,把具有一定弹性和硬度的机器人看作活塞。
在结构上,机器人其后面的流体压力大于前面的压力时,在压差的作用下,机器人克服了管壁与活塞之间的摩擦阻力而向前运动。
机器人可以携带各种传感器,一边行走一边用于管道检测。
图4 整体设计流程图
(2)滚轮移动式,利用滚轮驱动式的行走结构,以电机作原动机,为了增加牵引力,一般采用多轮驱动式,由于轮径太小,越障能力有限,而且结构复杂。
(3)履带移动式,仿造履带式车辆行走原理,采用带齿轮减速箱的直流伺服电机驱动。
(4)足腿移动式,其基本原理是利用足腿推压管壁来支撑机体,利用多腿可以方便地在各种形状的弯管内移动。
由撑脚机构、牵引机构和转向机构构成,可在各种类型的管道里移动。
(5)蠕动移动式,模仿昆虫在地面上爬行时蠕动前进与后退的动作设计,机构由蠕动丝杠、螺母、前后支撑足及前后封闭弹簧构成。
在行走时,分别使左右支撑足上端与管壁接触,下端用滚轮与管壁接触。
驱动蠕动丝杠依次左转和右转,使螺母在丝杠上左右移动。
(6)螺旋移动式,利用螺旋原理使管外电机推动带有弹性的驱动部件前进,该驱动螺旋部件可以自动越过小的台阶。
以上移动方式各有所长,我们在第六种螺旋移动的基础上进行改进,来实现
我们设计目的。
螺旋式上升的移动方式有着如下优点:
1)移动速度稳定,能够实现中途停止,顺应了多变的情况,便于应用于工
业上实际作业。
2)在整个上升过程中利用了滚动原理,较为稳定没有震动,内部能够安装
一些精密仪器。
3)旋转过程中有着与管道相垂直的径向转动,接触面较广,不存在死角问
题,便于实际应用中的勘测、清洗等实际工作的具体实施。
就螺旋式管道机器人各种设计也有个各自的优点,就我们一些参考文献中的设计方案进行对比来具体了解我们的机械结构原理。
下图出自论文《URT螺旋轮式管道检测机器人越障性能研究》中,与我们的方案类似的采用了三叉元结构,利用了三角形的稳定性。
就单单上图的设计我们提出了如下几个没有克服的问题:
1)驱动设计较少,在管道内部的环境中容易产生打滑等抱死的状况。
2)弯半径较大,无法适应复杂的管道内部状况。
3)上升力矩太小,垂直时无法克服重力以及管道内部的一些阻力。
我们会在我们的设计过程中一一克服以上问题。
二、实施方案 1、螺旋头的轴心偏移 在正常管道中, 3个沿管道周向120°均布的螺旋轮的初始预紧
力大小关系为: Fk1 = Fk2 = Fk3。
由于螺旋头的重量与弹簧预紧力相比较小,故可以忽略其影响。
设3个螺旋轮预紧弹簧的刚度系数均为k , 则o1 轮的弹簧预紧力增量为: △F1 = k ( x - oo ′) ;
o2 , o3 轮的弹簧预紧力增量为:
△F2 = k ·oo ′/sin30°。
由于3个轮子夹角不变,通过轴心处受力平衡易知: △F1 =△F2 ,即: x - oo ′= oo ′/ sin30°,故得轴心的偏移量为: oo ′= x /3。
2
、多节设计
如图是我们的设计方案,采用此种多节设计有着以下优点: 1)采用多节设计能够加大前进驱动力,不会出现卡死的现象。
2)各节之间运用万向接头3连接,能够在较小的半径下转弯。
3)多节半径柔韧性好,出现局部受阻现象后其他部位依旧能够正常工作。
3、伸缩装置
为了能够适应更多内径的管道,在每一节的设计中还有一个锁紧装置。
该伸缩装置一段与电机固定,另一端与一伸缩关节相连接。
工作时带有螺纹的主
螺旋头的轴心偏移力学模型
轴会随着电机进行转动,伸缩关节会随着螺纹进行上下移动。
在移动的同时带动连杆,减少两个连杆的角度,从而增加了轮子的中心距,达到了增大半径锁紧的目的。
伸缩关节的细节图如上所示,呈现三叶草状,每一个瓣对应相应的连杆。
关 节与连杆中间通螺栓进行间隙连接,能够自由移动。
4、舵机变速装置
为了便于控制,我们将控制轮子运动速度的电机设置为固定的,而轮子的角度则有舵机进行控制,控制范围为-20°—+20°。
如下图所示,假设有一个竖直管道,x 轴为水平转动速度,y 轴为竖直上升速度。
轮子与水平夹角a 可以在-20°—+20°之间进行改变,从而造成在y 轴上的分速度进行改变,达到了改变上升速度的目的。
在更改a 角的同时,也能够增加上升力矩,正如同千斤顶一样,用较小的力矩去克服较大的阻力,达到克服阻碍,顺利上升的目的。
单节结构示意图
伸缩关节示意图
如上图:1,2圆盘式舵机 4腿部支架 3轮子
1,2之间可以进行相对的精确转动,从而调整轮子与水平面的角度。
5、多节结构之间的连接
多节之间要能相对转动,但是却要保持连接。
于是我们采用了三节万向接头的连接方式(如右图所示)。
1-套筒; 2-十字轴 3-传动轴叉 4-卡环;
6 f# V% k1 ^$ K D2 n- m5-轴承外圈 6-套筒叉
工作原理:十字轴式万向节由一个十字轴,两个万向节叉和四个滚针轴承等组成。
两万向节叉1和3上的孔分别套在十字轴2的两对轴颈上。
这样当主动轴转动时,从动轴既可随之转动,又可绕十字轴中心在任意方向摆动,这样就适应了夹角和距离同时变化的需要。
在十字轴轴颈和万向节叉孔间装有滚针轴承5,滚针轴承外圈靠卡环轴向定位。
十字轴式刚性万向节具有结构简单,传动效率高的优点,但在两轴夹角α不为零的情况下,不能传递等角速转动。
6、预期的一些设计图
预期基本参数
净重:2-5kg
行走速度:0~5m/min无级调速
适应圆形管道:直径范围Φ120~200mm
管内越障高度:5mm
最小转弯半径:100mm
机器人系统控制
通过上述的机械设计的构思以及机械结构的制作,一个机器人的雏形已经形成。
但是机器人最重要的就是能使它能动起来,按照指令完成一定的动作,所以我们通过编程及运用单片机来控制机器人的运动,实现对机器人的系统控制。
如下是螺旋管道机器人的程序说明:
电机123
电机4
舵机123
按键说明 1 复位电机4正转收缩
2 复位 6舵机初始90度
3 装机器人电机反转伸长固定好机器人
4 慢速舵机正转:(5度)
5 中速舵机正转:(15度)
6 快速舵机反转:(25度)
7 上升电机123正转
8 下降电机123 反转
开始
If(按键1)
{
电机4正转收缩;(延时) }
If(按键2)
{
舵机初始0度;()
}
If(按键3)
{
电机反转伸长固定好机人;}
Else
{
If(按键4)
{
舵机初始0度
舵机旋转5度,
}
If(按键5)
{
舵机初始0度
舵机旋转15度
}
If(按键6)
{
舵机初始0度
舵机旋转25度
}
Else
{
If(按键7)
{
电机正转;(延时)上升}
If(按键8)
{
电机反转;(延时)下降}
Else
{
电机4正转收缩;()
舵机初始0度;()}
}
}
参考文献
[1] 赵丽艳樊友民主编 . 机器人制作宝典. 北京: 航空航天大学出版社,2004
[2] 宗光华主编.机器人的创意设计与实践.北京:北京航空航天大学出版社,2004
[3] 肖南峰编著《智能机器人》. 华南理工单靴出版社,2008
[4] 张国良敬斌刘延飞熊磊主编. 自主移动机器人设计与制作.
西安:西安交大出版社,2002
- 10 -。