机械动力学张斌PPT课件
汽轮机培训教材--张斌
第一章
电厂基础知识 第二节:电厂热力学基础知识
一、热力学参数
1、温度:物体表面的冷热程度 2、压力:物体单位面积上所承受的垂直作用力 3、绝对压力:容器内气体的真实压力。用P绝表示 4、表压力:用压力表计测得的压力。用P表表示 5、真空值:用真空表测得的数值。用H表示 P绝﹦P表+B大气压 P绝=H—B 6、比容:单位质量工质所占有的体积。符号:V 单位:立方米每公斤 7、密度:单位容积内工质的质量。 符号:ρ 单位:公斤每立方米 8、能:含有动能;物体由于运动而具有的能量 位能(势能):物体由于一定温度所具有的能 热能:物体内部分子由于热运动而具有的能量 内能:指储存与物体内部的能量。分:内动能,内位能
19
第二章
汽轮机的原理与分类 第一节:汽轮机工作原理
汽轮机:是一种以蒸汽作为工质,并将蒸汽的热能转换为机械功的旋 转式原动力机。
1、工作原理:蒸汽进入汽轮机喷嘴膨胀降压增加流速按一定的方向 喷射出来(将蒸汽的热能转变成动能),进入叶片推动叶轮旋转(蒸
汽的动能转变成转子的旋转机械能)并拖动发电机旋转。
7
2)抽汽凝汽式汽轮机:
如图所示,蒸汽在汽轮机前面几级做功后,将其中一部分蒸汽从气轮 机中抽出去,送入相应的蒸汽管网供汽轮机或其它生产工艺加热用, 其余的蒸汽在汽轮机的后几级做功后排入凝汽器。
发电机
张斌
3)背压式汽轮机 如图所示,蒸汽进入汽轮机膨胀作功后在大于一个大气压力下排出气
缸,即P排>P大气,其排出气送入相应的蒸汽管阀。
3
目 录
第一章 电厂基础知识
第二章
汽轮机的原理与分类
第三章
汽轮机本体
Hale Waihona Puke 第四章汽轮机调节保安系统
01-机械系统动力学ppt
m
v
n
m
i1
i
vS v
i
2
JS
i
ωi v
2
定轴转动——等效转动惯量
Jv
n
m
i1
i
vSi ω
2
JS
i
ωi ω
2
原系统运动构件的质量和对质心的转动惯量一般为常数; 等效质量和等效转动惯量与原系统的质量、惯性矩有关; 也与速比有关,速比 vi /v、ωi / v 、vi /ω 、ωi /ω是系统
14.2.1 作用在机械上的力
西安交通大学奚延辉 机械运转时,作用在机械上的力有驱动力、工作阻力、
重力、惯性力和运动副中的约束反力。
当忽略重力、惯性Biblioteka 和约束反力时,作用在机械上的外 力可分为两大类:驱动力和工作阻力。它们对机械的影响 最直接,因此,必须知道它们的机械特性。
所谓力的机械特性是指力与运动参数(位置、速度等) 之间的变化关系。把这种关系制成曲线即所谓“机械特性 曲线”。
Jv
dω dt
求解达到某角速度ω的时间:
ω
ω0
M
dω va M
vc
1 Jv
t
dt
t0
t t0 Jv
t
t0
ω
Jv
ω0
M
dω va M
vc
和此时的角位移:
M
va
M
vc
Jv
ω dω ω dt
0
ω
Jv
ω0
M
ω
va
dω M
vc
等效动力学模型中,等效力、等效质量的计算以及机械运动方
程式的求解各有一个例题,可以自行参考。
动力系统与机械工程课件
动力系统与机械工程课件一、引言动力系统与机械工程是现代工程技术领域中的重要学科之一。
本课件旨在介绍动力系统与机械工程的基本概念、原理和应用,以帮助学习者深入理解和掌握相关知识。
二、动力系统基础知识2.1 动力系统概述动力系统是指由动力装置、传动装置和工作机构组成的整体。
它将能量转化为机械运动来完成特定的工作任务。
动力系统的主要特点包括能量传递、转换和控制等方面。
2.2 动力系统的组成动力系统由动力装置、传动装置和工作机构三个基本部分组成。
动力装置是动力系统的能量源,可以是发动机、电动机、气动机等。
传动装置负责将能量从动力装置传递给工作机构,常见的传动装置包括齿轮传动、皮带传动、液压传动等。
工作机构则是完成具体工作任务的装置,例如机床、发电机组、汽车等。
2.3 动力系统的分类根据能量类型的不同,动力系统可以分为机械动力系统、电力动力系统、液压动力系统等。
根据能量转换方式的不同,动力系统可以分为连续动力系统和离散动力系统。
根据功率的大小,动力系统可以分为微动力系统、小功率动力系统和大功率动力系统。
三、机械工程基础知识3.1 机械工程概述机械工程是研究机械设备的设计、制造、运用和维护的学科。
它涉及到机械设计、机械制造、机械传动、机械控制等多个方面。
3.2 机械设计原理机械设计是指根据工作要求和设计规范,选择合适的零部件,确定合理的尺寸、形状和结构,设计出能够满足特定工作任务的机械设备。
机械设计原理包括受力分析、设计计算和结构优化等内容。
3.3 机械传动原理机械传动是将动力从一个部件传递到另一个部件的过程。
常见的机械传动方式包括齿轮传动、带传动、链传动等。
机械传动原理涉及到传动比的计算、传动效率的评估以及传动装置的选择等内容。
3.4 机械控制原理机械控制是指对机械设备进行运动速度、位置、力等方面的控制。
常见的机械控制方式包括手动控制、自动控制和数控控制等。
机械控制原理涉及到控制系统的设计、传感器的应用和执行机构的选择等内容。
机械系统动力学培训教程(ppt 46页)
10.1.2 机械的运转过程
• 2、稳定运行阶段:
– 原动件速度保持常数(称匀速稳定运转) – 原动件围绕某一恒定的平均值作周期性速
度波动(称变速稳定运转)。
在一个周期内任一时间间隔中,输入功与总 耗功不一定相等。
10.1.2 机械的运转过程
• 停车阶段:
– 原动件从正常转速下降到0。
启动阶段和停车阶段统称为机械系统的 过渡过程。
10.1 作用在机械中的外力和机械 的运转过程
• 10.1.1 作用在机械上的力
– 驱动力 – 工作阻力
1、驱动力:原动机发出的力(力矩)。
– 常用原动机有:内燃机、直流电动机、交 流电动机
– 机械特性:机械的力学参数(力或力矩)与运 动参数(位移、速度、加速度)之间的关系。 例如:
a、内燃机发出的驱动力是活塞位置的函数; b、电动机发出的驱动力矩是转子角速度的函
10.2 机械的等效动力学模型
2、 等效力矩
• 求等效力矩遵循的原则:作用在各构件上的外力和外力矩 所作功(功率)之和等于作用在等效构件上的等效力矩(或 力)所作功(功率)。 – 选转动构件为等效构件,根据功率等效原则:
等效力矩:
Hale Waihona Puke 小结:1〕 Me是等效力矩,是机构位置的函数; 2〕等效力矩Me为正时,为等效驱动力矩;为负
• (4)球磨机、粉碎机: 工作阻力是时间的函数
10.1.2 机械的运转过程
• 机械系统的运转过程分为三个阶段: 启动、稳定运转和停止。
10.1.2 机械的运转过程
10.1.2 机械的运转过程
10.1.2 机械的运转过程
• 机械系统的动能方程:
1、启动阶段:
原动件的速度(或角速度)从零逐渐增加, 直到开始稳定运转。
机械动力学演示文稿(五)

3
u m2 m1
以上符号:
st
P1 k1
n1
k1 m1
n2
k2 m2
n1
n2 n1
c 2 k2m2
由(3)式可知
[5-3]
2
A1
st
f . .. u
当 u , 确定后, 则 A1 F ,
st
分析(3)式:
(1) 当 0 时,有 :
A1
2 2
4
st 1 2 2 2 u2 2
(3)一般情况 0 时
● 不同值 ,不同幅频曲线,无论 为何值,所有曲线过P和Q点。令该两点分 别对应的频率 : P 1 ; Q 2
●即当 1 或 2 时A1 值与 大小无关。设计有阻尼动力减振器重要依据。
● 求P,Q 对应的 1 和2 值,选两条特殊曲线 0 和 时情况,
a
[5-2]
k2 ic A1ei21 k2 m2 2 ic A2 0
b
上式可解出 A1, A2 ,但关注的是 A1 的大小。
由(b)式:
A2
k2
k2 ic m2 ic
A ei2 1 1
代入(a)式有
A1ei1 P1
k1 m1 2
k2 m2 2 ic k2 m2 2 k2m2 2 ic k1 m1 2 m2 2
动力减振器视辅助质量与主质量联结方式不同分为: ⅰ 有阻尼动力减振器(有弹性元件又有阻尼元件与主质量联结) ⅱ 无阻尼动力减振器(有弹性元件无阻尼元件与主质量联结) ⅲ 磨擦减振器(无弹性元件只有阻尼元件与主质量联结)
以图示有阻尼动力减振器为例 如图系统的振动微分方程:
m1x1 cx1 x2 k1 k2 x1 k2 x2 p1eit m2 x2 cx1 x2 k2 x1 k2 x2 0
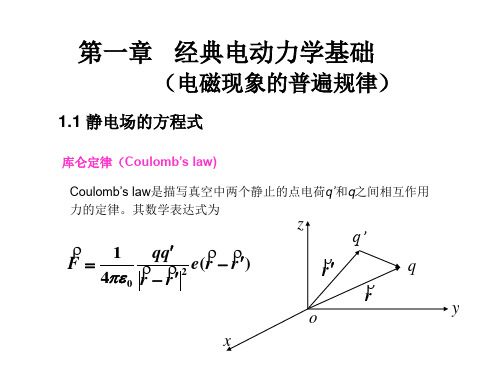
清华大学张斌电动力学1
j d
S
而流出去的电量应该等于封闭曲面S内总电荷在单位时间内的减少量,即
d d j d dt V S
根据Gauss’ theorem,有
( j )d 0 t V
由于曲面S是任意选取的,所以被积函数恒为零,即
j 0 t
对于稳恒电流, j (r) 0 故有 0 j (r ) 0 A(r ) d 4 V r r 4
即得到
j ( r ) dS r r S
由于电流应全部包含在积分区域内,因而在边界面上电流密度的法向分量应为零,
1 E d
S
0
q
i 1
k
i
q
0
这里q仅仅是封闭曲面S内的总电荷
对于连续分布的电荷体系来说,则有
1 E d
S
0 V
d
因此,得到
V
1 Ed
0 V
d
因为,体积分是任意取的,所以两边被积函数必须相等
1 E
这就是电荷守恒定律的数学表达式,也称连续性方程。
0 ,所以稳定电流条件为 在稳定电流的情况下,由于 t
j 0
磁场(magnetic field) 稳定电流周围有静磁场,同时磁场对电流有作用力。与静磁场有关的规律有三点
(1) r 处的电流元 j ( r )d 在
先看右边第一项 得到
j ( r ) d r r
0 A(r ) 4
1 1 j (r ) j (r )d r r V r r 0 1 j (r )d 4 V r r
机械动力学第三章课件

若作用于构件 i上的作用力为Fi,力矩为Mi ,力Fi 作用
点的速度为ui ,构件的角速度为ω i ,则其瞬时功率为:
N Ni ( Fi i cos i Mii )
i 1 i 1 n n
dE dW 运动方程的一般表达式为: Ndt
2 d [ ( miv Si / 2 J Si i2 / 2)] [ ( Fi v i cos i M i i )]dt i 1 i 1 n n
机械系统的等效动力学模型
机械系统是复杂多样的,在进行动力学研 究时,通常要将复杂的机械系统,按一定 的原则简化为一个便于研究的等效动力学 模型。 为了研究单自由度机械系统的真实运动, 可将机械系统等效转化为只有一个独立运 动的等效构件,等效构件的运动与机构中 相应构件的运动一致。
等效转化的原则是:
二、作用在机械上的力
当忽略机械中各构件的重力以及运动副中的摩擦力时, 作用在机械上的力可分为工作阻力和驱动力两大类: 1. 工作阻力 工作阻力是指机械工作时需要克服的工作负荷,它决 定于机械的工艺特性。
在机械的生产过程中,有些生产阻力为常数,有些是位
置的函数,还有一些是速度的函数。
二、作用在机械上的力
1
v3 ) F3
Fe M 1 (
2 v3 d me (v3 ) Fe ( s3 , v3 , t )v3 dt 2
(能量微分形式的运动方程式)
小结:
若取转动构件为等效构件,有:
J e [m i (
i 1
n
n
v Si
) 2 J Si (
i 2 ) ]
v3 vc 2 l
v 4 v c sin 2 2 l sin 2
机械系统动力学课件
从能量角度看,惯性是保持动能的元素,恢复性 是贮存势能的元素,阻尼是使能量散逸的元素。 当物体沿x轴作直线运动时,惯性的大小可用质 量来表示。根据牛顿第二定律,有:
d x F m 2 dt
质量的单位是KG。物体的质量是反映其惯性的基 本元件,质量的大小是反映物体惯性的基本物理 参数。
2
典型的恢复性元件是弹簧,该恢复性元件所产 生的恢复力Fs是该元件位移x的函数,即: Fs= Fs(x) 其作用方向与位移x的方向相反。当Fs(x)为 线性函数时,即 Fs=-kx
初始扰动(初始条件) 以扰动加于系统上的这一时刻作为时间计算 的起点,即t=0 因此,加到系统上的扰动也叫做初始扰动, 一般叫做加于系统上的初始条件 加于系统上的初始扰动可以是初始位移或初 始速度
坐标的建立 • 取系统静平衡位置作为空间坐标的原点 • 以x表示质量块由静平衡位置算起的垂 直位移,假定向下为正 • 在某一时刻t,系统的位移为x(t)
0
2 2 n
0
2 2 n
上式叫做系统的特征方程或频率方程 它有一对共轭虚根:
1 jn
2 jn
叫做系统的特征值或固有值
方程的两个独立的特解分别为
x1 (t ) B1e
x2 (t ) B2 e
B1和B2是任意常数
j n t
j n t
2 T a0 x(t )dt T 0 2 T b0 x(t ) cos ntdt T 0 2 T bn x(t ) sin ntdt T 0
an cos nt bn sin nt An sin(nt n )
式中:
对于特定的n,我们可得
An a
2
n