撞击式桑葚采摘机设计
采摘设备产品设计方案

采摘设备产品设计方案采摘设备产品设计方案一、项目背景与市场分析随着农业产业化和农业机械化程度的提高,农业采摘设备的需求不断增加。
传统的采摘方式效率较低,成本较高,而且劳动强度大。
因此,设计一款高效、智能的农业采摘设备成为解决这一问题的关键。
二、产品概述本产品是一款基于机器人技术的农业采摘设备,旨在提高农业采摘的效率和质量,并减轻劳动强度。
本产品采用自主定位、自主识别和自主操作的技术,可以根据农作物的不同特点进行智能化采摘,适用于果蔬等农作物。
三、产品特点及优势1. 自主定位与导航:通过激光雷达和传感器,实现对农田环境的感知和自主定位,避免碰撞风险,提高采摘效率。
2. 自动识别与筛选:通过视觉识别技术,能够准确识别目标果蔬的成熟程度,并自动进行筛选,提高采摘品质。
3. 多种采摘方式:根据不同果蔬的特点,设计多种采摘方式,可根据需求进行选择,确保采摘效果。
4. 智能控制系统:采用先进的控制系统,可以进行智能化的操作和调整,根据工作环境和作物生长状态进行自动化控制,提高采摘效率和质量。
5. 人机交互界面:采用人机交互界面,操作简便明了,易于掌握,可根据用户的需要进行参数设置和监控。
四、设计方案1. 结构设计:采用轮式移动结构,可以灵活适应不同的农田环境,并通过可调节的机构实现多种采摘方式。
2. 采摘装置设计:通过机械臂和夹取装置,实现对果蔬的采摘和收集。
3. 视觉识别系统设计:结合计算机视觉技术,实现对果蔬大小、颜色和成熟度等参数的识别和判断。
4. 控制系统设计:采用嵌入式控制系统,结合传感器和执行器,实现对机器人的控制和协调。
5. 人机交互界面设计:通过触摸屏和按键控制,实现对机器人运行状态的监控和参数设置。
五、市场分析与前景目前农业采摘设备市场需求不断增加,而且国家对农业机械化的支持力度不断加大,提供了良好的发展机遇。
本产品具有高效、智能的特点,能够满足农业采摘设备的需求,具有较好的市场竞争力和发展前景。
桑葚主干低阶共振频率试验及振动采摘装置设计

72 6 1 7 7 8 2 7@ q q .c o n。 r
通讯作 者 :李敏 通( 1 9 6 8 一) , 男, 陕西 武 功人 , 副教 授 , ( E- ma i l ) l m t y d
@ n ws u a f . c n
图1 C主干传感器 布置
F i g . 1 C t r u n k s e n s o r a r r a n g e me n t
了桑 葚 主 干 的低 阶共 振 频 率 ; 完成 便 携 式 桑 葚振 动 采 摘 装 置 的设 计 和试 制 , 并 进 行 验 证 试 验 。结 果 表 明 : 当采 收 的桑 葚 二 级 主 干直 径 为 4 0—5 0 m m范围、 激振频率大于 6 . 1 1 H z时 , 虽 然 能 实 现 较 高 的桑 果 收 获 率 , 却 造 成 未 成 熟桑果脱落 ; 当激 振频 率 大 于 8 Hz 时, 造 成 桑 葚植 株 树 皮 外 表 面破 裂 ; 激振频率较小 时 , 则 获 得 较 低 的桑 果 收 获
加速数据采集系统 , 以完成低 阶共振频率试验。试 验 中, 使用力锤 输 出一定 的外 部锤 击力 作用 于桑 葚 主 干, 并 通 过力 传 感 器 对 锤 击 力 度 进 行 测 量 , 同 时 通 过
水果自动采摘小型机械车的结构设计
水果自动采摘小型机械车的结构设计在现代社会发展极具迅速的时代,对水果的分类和采摘也成为了热议的话题,利用先进的技术,减少人力和物力,对多种水果进行分类及采摘。
我们提出了水果自动采摘小型机械车的初步设计。
了解水果自动采摘小型机械车的设计背景、结构及工作流程,对其结构进行运动分析,并进行设计。
水果自动采摘小型机械车不仅提高了采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益,因此,提高采摘作业机械化程度具有重要意义。
随着农业从业者的减少及老龄化趋势的不断加大,水果自动采摘小型机械车的开发利用具有巨大的經济效益和广阔的市场前景,水果自动采摘小型机械车对未来农业的发展将起到积极作用。
标签:水果自动采摘小型机械车;自动采摘识别;机械臂识别;初步设计Abstract:In the era of rapid development of modern society,the classification and picking of fruits has also become a hot topic. Using advanced technology,reducing manpower and material resources to classify and pick a variety of fruits,we put forward the preliminary design of the small mechanical vehicle for automatic fruit picking. To understand the design background,structure and work flow of the fruit automatic picking small mechanical vehicle,the structure of the movement analysis and design. Automatic fruit picking small mechanical vehicles not only improve the picking efficiency,but also reduce the damage rate,save labor costs,improve the economic benefits of fruit farmers,so it is of great significance to improve the degree of mechanization of picking operations. With the decrease of agricultural practitioners and the increasing trend of aging,the development and utilization of small mechanical vehicles for automatic fruit picking has great economic benefits and broad market prospects. Automatic fruit picking small mechanical vehicles will play a positive role in the future development of agriculture.Keywords:small automatic fruit-picking mechanical vehicle;automatic picking identification;mechanical arm identification;preliminary design1 概述水果种植业的迅速发展提升了果园机械的市场需求。
全国大学生机械工程创新设计大赛获奖案例《背负式全方位剪切柑橘类水果采摘装置》

背负式全方位剪切柑橘类水果采摘装置本案例荣获全国大学生机械工程创新设计大赛一等奖1.设计目的现代化机械装置正在逐渐代替人类原始的劳动工具和劳动方法,机器人采摘由于技术和成本的原因,在今后较长时间内无法投入实际应用,在这种背景下,机械式釆摘将占据主流。
目前果园的机械式采摘主要有振摇式、撞击式和切割式。
但是振摇式和撞击式的采摘机械的效率普遍较低,采摘的损伤较高,也不适用于釆收易损伤、要求完好率高的新鲜食用水果和贮藏用水果。
而切割式釆摘是将树枝或果柄切断使果实与果树分离的采摘方式,在切割完之后能立即放入果篮中,可避免果实坠落至地面,减少损伤。
因此切割式采摘器的应用前景显得十分可观。
2.工作原理本设计的水果采摘装置结构简单,主要由背负装置、采摘杆、全方位切割刀头、软管、篮子等组成,其中采摘杆是可伸缩杆,用以满足不同高度的采摘任务。
果农驱动操作手柄可驱使采摘刀片进行剪切,水果被剪切下来后,顺着用尼龙材料制成的水果运送管道掉进水果筐里。
用柔软材料制成的运送管道可保证水果表面不受摩擦,从而保证水果的质量和质地。
若果农把釆摘刀片更换为套袋装置,则可以进行水果的套袋工作,方便快捷,效率高。
同时果农也可以用采摘器的头部作为支架进行农药喷洒和修剪树枝工作。
综上所述,该简易型水果采摘装置实现了农业生产中的不同工作的集中。
为减轻本装置对使用者右臂的负担,在杆的(从近地端算起)1/3处安装一根拉簧,可分担一部分作用力,减轻使用者的负担。
背负式水果采摘装置示意图如图1所示。
刀头结构示意图如图2所示。
刀头剪切机构是由多个结构相同的刀片组成的,在此只对一个刀片进行分析。
如图3所示,在刹车线的牵引下,活动刀片会绕着固定轴向下转动,其刀刃与固定刀片的刀刃相交错,从而实现剪切;在一次剪切完成之后,在小压簧的作用下活动刀片回复到原位置,进行第二次剪切。
在安装时,用M3的螺母和螺钉及3 mmX7 mm X0.5 mm的垫片装配固定刀片和活动刀片,一共安装15组此装配体,再把它们均匀安装在直径为150 mm 的环形刀头上。
全国大学生机械工程创新设计大赛获奖案例《便携式水果采摘装置》
便携式水果采摘装置本案例荣获全国大学生机械工程创新设计大赛一等奖1.设计目的我国不仅是水果生产大国,同时也是第一消费国。
国民对水果旺盛的需求为果园种植业创造了巨大的市场,果园种植业具有广阔的发展前景。
传统人工釆摘的方式易造成果实损伤,同时,采摘不及时将会导致经济上的损失。
为了节约人力物力,提高果农的经济效益,开展采摘器械的研究有重要的意义。
目前普遍使用的半自动机械式釆摘器对外界环境伤害大、通用性差、操作复杂。
基于这样的研究现状,我们设计了一种新型的电动机械式采摘机。
该器械采摘时对外界环境干扰小、工作可靠方便、通用性强,适用于大多数果园种植水果的釆摘。
2.工作原理根据分离果树与果实的方式,目前大部分末端执行器大体分为两类:第一类是强行拉断果梗来实现果实与果树的分离;第二类是先用夹具加紧果实,再通过剪刀、锯条、高压水枪、激光等工具切断果梗,从而将水果从果树上釆摘下来。
第一类采摘执行末端容易拉断其他枝条,对果树的伤害较大。
而第二类采摘执行末端也存在较多缺点:其一,执行器在切断果梗之前,要先用夹具夹住果实,夹具的夹紧力很难控制,过小会导致果实脱落,过大则会损坏水果;其二,准确抓取果实对机器人视觉系统以及机械手的控制要求较高,微小的误差都会导致采摘失败。
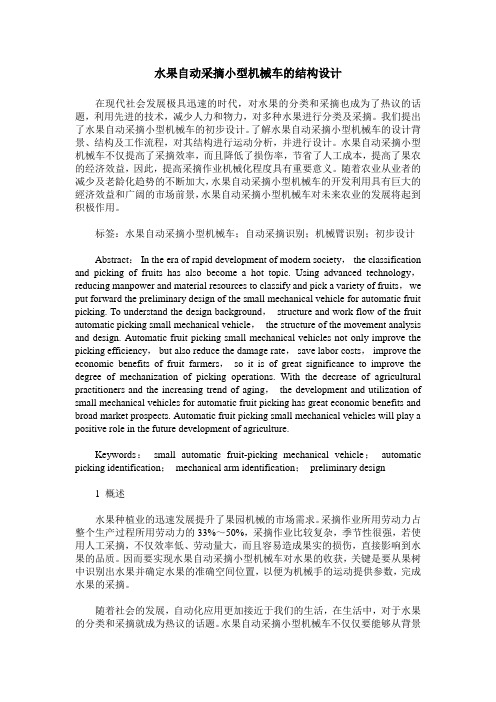
本次设计釆用的剪切执行机构的俯视图如图1所示。
该切割装置由动定切割刀组和伺服电动机组成,控制系统通过控制伺服电动机往复旋转从而带动切割刀切断果柄。
同时,我们建立了活动刀片在剪切果柄时受到的切应力模型并结合该模型对伺服电动机进行选型。
釆集水果时手动控制红外信号发射装置,单片机接收信号后控制电动机转动,进而对水果枝梗进行剪切。
切割时,单片机通过实时监测伺服电动机的工作电流做出相应的控制策略,以防止果柄过硬刀片无法切断导致伺服电动机堵转的情况发生。
切掉的水果经过下落口直接输送到水果采集箱当中,同时实现水果的摘取、收集工作。
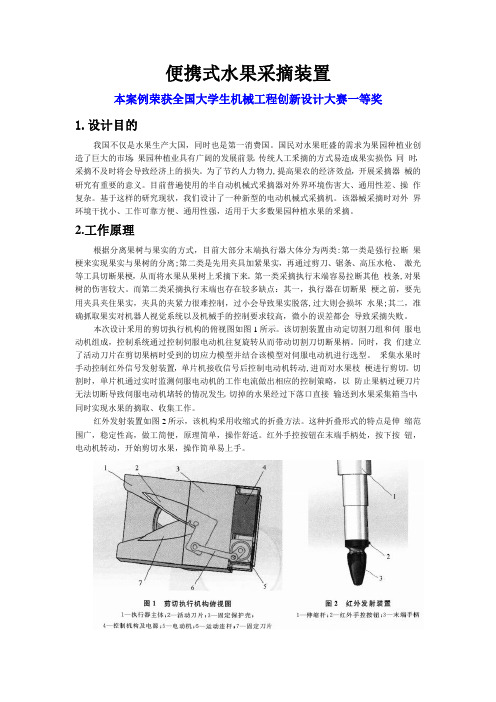
红外发射装置如图2所示,该机构釆用收缩式的折叠方法。
桑葚主干低阶共振频率试验及振动采摘装置设计

桑葚主干低阶共振频率试验及振动采摘装置设计丁红星;李敏通;薛忠民【期刊名称】《农机化研究》【年(卷),期】2017(039)008【摘要】随着桑葚产业的多元化发展,桑葚的种植面积逐年增加,仅依靠人工实现桑葚采收难以满足生产需求,因而机械化采摘成为桑葚采摘的发展方向。
振动采收桑葚是机械化采收的有效方法[1],研究桑葚振动脱落特性及设计相关振动采收设备对桑葚产业的健康发展具有重要价值。
为此,通过桑葚主干低阶共振频率试验,获取了桑葚主干的低阶共振频率;完成便携式桑葚振动采摘装置的设计和试制,并进行验证试验。
结果表明:当采收的桑葚二级主干直径为40~50 mm 范围、激振频率大于6.11 Hz 时,虽然能实现较高的桑果收获率,却造成未成熟桑果脱落;当激振频率大于8 Hz 时,造成桑葚植株树皮外表面破裂;激振频率较小时,则获得较低的桑果收获率。
因此,建议当振动采摘的二级主干直径在40~50 mm范围内时,桑果振动采收的最适宜激振频率范围为5~6Hz,即电机实时转速为900~1100r/min。
%With the diversified development of mulberry industry , mulberry planting area has increased year by year , on-ly rely on the artificial mulberry harvesting is difficult to meet the production demand today , so the mechanization of mul-berry picking is the direction of development of mulberry picking .Vibration harvesting mulberry is mechanized harvesting effective method[1] , the mulberry of vibration shedding characteristics and design of vibration harvesting equipment , of mulberry industry healthy development has important value .Through themulberry trunk is low order resonance frequency test , access to the low order resonance frequencies of the mulberry trunk;portable mulberry vibration picking device de-sign and manufacture , and outdoor experiments .The results show that when the harvest of mulberry secondary trunk di-ameter to 40-50 mm range, excitation frequency is greater than 6.11Hz, although can achieve higher mulberry fruit har-vest rate, but caused abscission of immature mulberry .When the excitation frequency is greater than 8 Hz, resulting in rupture of mulberry tree plant on the outer surface; the excitation frequency is small , lower the mulberry fruit harvest rate, it is recommended when picking vibration secondary trunk diameter in the range of 40-50 mm, picking mulberry vibration optimum excitation frequency range for the 5-6Hz (i.e., the motor speed is 900-1 100r/min).【总页数】6页(P159-164)【作者】丁红星;李敏通;薛忠民【作者单位】西北农林科技大学机械与电子工程学院,陕西杨凌 712100;西北农林科技大学机械与电子工程学院,陕西杨凌 712100;西北农林科技大学机械与电子工程学院,陕西杨凌 712100【正文语种】中文【中图分类】S225.93【相关文献】1.基于振动原理的酿酒葡萄采摘试验装置的设计 [J], 冯玉磊;坎杂;李成松;王丽红;袁盼盼2.基于共振频率搜索实验室间振动试验比对设计 [J], 洪翔3.蓝莓采摘机振动采摘装置凸轮机构的设计与试验 [J], 耿雷;郭艳玲;王海滨;李东升4.桑葚振动采摘参数的试验研究 [J], 丁红星;李敏通;彭俊;刘志杰5.手持振动梳刷式小粒咖啡采摘装置设计与试验 [J], 于英杰;王剑;赖庆辉;贾广鑫;于飞;曹颖因版权原因,仅展示原文概要,查看原文内容请购买。
一种旋转切割式水果采摘器设计
一种旋转切割式水果采摘器设计秦涛; 李江江; 石刘洋【期刊名称】《《林业机械与木工设备》》【年(卷),期】2019(047)003【总页数】4页(P37-40)【关键词】采摘器; 旋转切割; 运动转换; 结构设计【作者】秦涛; 李江江; 石刘洋【作者单位】湖北文理学院机械工程学院湖北襄阳441053【正文语种】中文【中图分类】S225我国是一个水果生产大国,但目前水果采摘大部分还是以人工采摘为主[1-2]。
采摘中存在工作量大、作业范围广、触碰力度控制要求高等问题[3]。
目前常见的采收机械主要分为以下4种形式:机械推摇式采收机、机械撞击式采收机、气力振摇式采收机和剪刀切割式采收机[4],这些设备均存在成本高、劳动强度大、操作复杂等问题,这与农业劳动力短缺和人工成本升高的现实状况相矛盾。
因此,设计了一种能提高采摘效率、节省人力的便携旋转切割式水果采摘装置。
1 旋转切割式水果采摘器结构设计旋转切割式水果采摘器主要由采摘机构、收纳机构和传动机构三部分组成,如图1所示。
采摘器采用多层内外套杆式,内杆、外杆和手持杆都采用轻质杆,质量轻、便于操作,且可根据需要适当加长杆的长度,有很强的实用性。
1.1 结构组成采摘机构主要包括定刀片、动刀片和换向部分,定刀片固定在手持杆顶部的端盖上,动刀片固定在内杆端部的联轴器顶端,两者相对转动实现旋切。
为了避免采摘过程中果柄滑切现象,提高采摘成功率,实现有效采摘,试制不同形状的切割刀片,并进行了切割对比实验,最终将定刀片和动刀片都设计为相对的圆弧形刀片。
为了避免采摘过程中刀片划伤水果,保证水果采摘质量,换向部分通过万向节联轴器改变旋转切割平面,使刀片与水平面成一定角度。
收纳机构主要包括套袋环与收纳袋,收纳袋采用具有压缩弹簧或弹性带等缓冲结构,以避免在多个水果落入时碰撞损伤。
采摘器总体结构如图1所示。
图1 采摘器总体结构传动机构主要由麻花杆、滑动组件和内外杆等组成,如图2所示。
振摇式桑葚采摘机设计
无特殊要求,故轴的材料选用45钢。经调质处理。
12.减速换向装置
该装置是由圆柱圆锥二级减速器改造而成,在减速器 低速轴上齿轮上用一个螺钉与连杆连接,这样就可以把齿 轮的匀速圆周运动转换为往复直线运动,从而实现振动头 的往复振动。
13.总装配图
14.总结与展望
14.1总结
本课题针对桑葚树以及桑葚树种植环境的特点,采用振 动法对桑葚采摘进行了比较深入的研究,同时根据机械设计 理论、机械振动、农机与农艺学设计了一种振动式桑葚采摘 机。由于本文采用了小型汽油机为动力源以及软轴传动,使 采摘机的整体质量比较小,很容易携带进行采摘。 在设计的过程中完成了原理的确定,方案的比较和选择,零 部件的设计与计算,最终完成图纸的绘制。设计的振摇式桑 葚采摘机械在人为操作配合下能够实现采摘作业。但是还没 有实现完全自动化采摘,需要进一步设计能够自动辨别果实 并确定桑葚位置的智能化桑葚采摘机械。
2.2能流图
3.动力源的选择
方案一:电动机
缺点:需要电源 重量大 携带不方便
方案二:汽油机
优点:能源充足 重量轻 携带方便
汽油机型号:139FA
4.振动头的设计
4.1夹持式振动头
4.2 U型振动头
4.3两种方案的比较
经过试验表明,该振动头的设计结构简单,容易制 造,且能够获得较好的采摘效果。对于枝条直径在 10mm-50mm的枝条来说采摘效果更好。因此最终暂定
连杆是将从减速装置低速级齿轮上的振动力传递给采摘 杆,并由采摘杆传递给振动头。
9.齿轮的设计计算
9.1低速轴齿轮的设计
小齿轮选用40Cr,调质处 理,硬度为241HB—286HB, 取平均硬度为260HB;大齿轮 选用42SiMn,调质处理,硬度 为217HB—255HB,取平均硬 度230HB。
种果蔬采摘竞赛机器人的设计
种果蔬采摘竞赛机器人的设计竞赛机器人的设计是基于高效、精确和自动化的原则,旨在提高果蔬采摘的效率和质量。
下面我将详细介绍这款机器人的设计。
一、机器人的结构和执行机构:1.结构设计:机器人的结构采用轻巧、紧凑的设计,以便在狭小的果蔬园地中自由活动。
机器人的主体部分由高强度、轻质的材料构成,以减少机器人的自身重量,提高机器人的机动性和灵活性。
2.执行机构:机器人配备了多个执行机构,包括机械臂、摄像机、传感器等。
机械臂用于采摘果实,其中的抓取器可以根据不同果蔬的形状和大小进行调整。
摄像机用于监控果蔬的生长情况和位置信息。
传感器用于检测果实的成熟度和质量。
二、机器人的感知和定位系统:1.相机视觉系统:机器人配备了高分辨率的相机,可以获取果实的图像信息。
通过图像处理算法,机器人可以实时识别出果实的位置、大小和成熟度。
2.定位系统:机器人通过激光雷达或GPS等定位技术,确定自身的位置和姿态,以便精确地定位和采摘果实。
三、机器人的控制系统:1.控制算法:机器人采用先进的控制算法,以实现自主操作和快速响应。
通过与相机和传感器的配合,机器人可以实时感知果实的状态和环境的变化,并做出相应的决策。
2.控制器:机器人配备了高性能的控制器,其运行速度和计算能力可以满足机器人复杂的控制需求。
控制器可以根据预设算法和规则,精确地控制机械臂的运动、摄像机的焦距和传感器的灵敏度。
四、机器人的智能决策系统:1.决策算法:机器人配备了智能决策算法,可以根据果蔬的生长情况、成熟度和质量,以及当前的环境条件,进行智能化的决策。
例如,机器人可以根据果蔬的成熟度和质量,决定是否采摘该果实,以及确定采摘的方式和顺序。
2.数据处理和分析:机器人通过处理和分析大量的数据,可以根据历史数据和趋势预测果蔬的生长情况,并提前做出相应的调整和决策。
五、机器人的安全保护系统:1.碰撞检测:机器人配备了碰撞检测传感器,并通过控制系统实时监测机器人周围的环境。
新型水果采摘装置的设计
【参考文献 】 l1】《机 械 原理 》西北 工业 大 学(第八 版) f2 J孙 荣创 .数控 技 术及 装备 的发 展 趋 势及 策略 UJ.中 国科技 信
2装 置设 计
图 1水 果 采 摘 装 置 示 意 图
4结语 基 于 目前 的 农业 现 状 以 及 当前 科 技 发 展情 况 .我 们 没计 了 这 款 水 果 采摘 装 置 。该 装 置 具有 环 保 节 能 的 优 点 ,还 具 有 良好 的 减 震抗 震能 力 .在 水果 采摘 过 程 中可 以 在 一 定程 度上 减 少 水 果 磕 碰 ,相 比 同 类 型 水 果 采摘 装 置 具 有 方 便 操 作 不 需要 人工 承 载 水 果 极 大 减 少 工 人 采摘 负荷 量 的 优 点 ,使 得 装 置 操作 者 可进
3装置 基 本组 成 (1)水 果 采摘 装 置 水果 采摘 装 置 由尉 形 剪 刀及 下 部 水
果漏 斗 组 成 ,主要 功能 是 同定 与采摘 水 果 、 (2)水 果传 输 装 置 采下 的 水 果经 漏 斗 进 入 柔性 管道 传
输 到车 斗 ,方 便 大量 水果 采摘 。 (3)饥 械臂 动 力装 置 : 由 慧 鱼 模 型搭 建 的 机 械臂 辅 助 气
42 II:辑 ;鬣 20 l7{卜第1【)!{JJ
通 过 查 阅 资 料 发 现 现 有 的 水 果 采摘 器 械 过 于简 单 , 多为 杆 状 手持 器 械 .增 加 了 使 用 者 的 负 担 及 手 部 、眼 部压 力 . 不能 很 好地 减轻 使 用 者的 工 作 量 ,于 是 我 们 决 定 采用 车体 设计 ,即 将 水 果 采摘 装 置 以车 的形 式 出 现 ,并 设 有 水 果 采摘 后 的收 纳 箱 以 便可 以 一 次 采取 可 观 数 量 的 水 果 ,克 眼 了,传统 人工 采摘 单 人 承 载 量 少 的缺 点 、车 中 采 用气 动 装 置 为 采摘 装 置提 供 动 力 .在 采 摘机械手下方 没置 引导软管 ,尽量减少水果在到达收纳 箝之前 的 磕 碰 .收 纳 箱 内也 进 行 缓 冲 防 震 设 汁 ,防止 采摘 运 输 过 程 中 对 已 采摘 水 果造 成二 次 伤 害 进 行 防 碰 撞 没 计 以 免 降低 优 质 果 量 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
推杆设计
由于要防止运动干涉,一方面要防止推杆在回程时会与外壳相撞产生,另一方面 要防止连杆在随圆盘转动时会与外壳发生干涉,鉴于考虑实地操作该机械的需要, 推杆的长度设计为270mm.
圆环推杆设计图
外壳的设计
因为外壳可能会与连杆的运动以及推杆的运动产生干涉,在不发生干涉的情况下设计 出上壳体和下箱体,采用铸造的方法。
国内研究现状与分析
21 世纪是农业机械化向智能化方向发展的重要时期。随着农业生产的规模化、 多样化和精确化,农业生产作业要求逐渐提高,许多作业项目(如蔬菜和水果的挑 选与采摘、蔬菜的嫁接等)都是劳动密集型工作,再加上时令的要求,保证作业质 量成为关键问题;同时,工业生产发展迅猛,农业劳动力将逐渐向社会其他产业转 移;随着人口的老龄化和农业劳动力的减少,农业生产成本也相应提高,这样大大 提高了产品的市场竞争力。果品采摘作业是水果生产链中最耗时、最费力的一个环 节。采摘作业季节性强、劳动强度大、费用高,因此保证果实适时采收、降低收获 作业费用是农业增收的重要途径。由于采摘作业的复杂性,采摘自动化程度仍然很 低。 我国果园采摘机械的研究始于 20 世纪 70 年代,先后研制出与手扶拖拉机配 套的机械振动式山楂采果机、气囊式采果器和手持电动采果器。90 年代开始,市 场的因素带动了果树种植的热潮,众多中小种植户的需求带动了简易采摘器的市场。 其后气动式剪枝机、辅助升降平台等机具相继进入了市场,国内气动剪著名厂商有 台湾郁馨公司的 ST-360 型气动剪。1992 年浙江金华农机所研究了由拖拉机操作 的用于采摘水果的升降机。我国普遍使用的是高枝剪等手工采摘机具,效率低。最 近我国有一些采摘机具的专利,如简易液压机械手(专利号:97210599.9)、果品 采摘器(专利号:97121803.X)。这些专利没有突破采摘效率很低的问题。我国东 北林业大学在国家 863 课题资助下研制了林木球果采摘机械手,但由于采摘效率 低,并且设备复杂,没有实用化。2007-2009 年,新疆农垦科学院和机械装备研究 所研究和开发了机械振动式林果采收机。它主要由果树振摇装置、液压控制系统、 油箱及配重等组成。该采收机工作原理是基于机械振动的果实脱落原理。
相关减速器的设计
相关减速器的设计
因为偏心盘的转速为210r/min,而原动机的转速为1390r/min,传动比为6.6,采用 带传动(i=3)和一级圆柱齿轮减速器,可以达到采摘机构工作时的要求。 运动和动力参数计算将传动装置的两轴由高速到低速依次定位I 轴,Ⅱ轴以及
相关减速器的设计
带传动的设计计算 减速器内传动件的设计 高速轴的设计计算以及校核 低速轴的设计计算以及校核 减速器轴承的校核
撞击式桑葚采摘机结构设计与工作原理
本机构基于曲柄滑块的原理,通过偏心盘转动带动推杆运动,将机械撞击传递给桑 葚果树,果树主干受到这个外加的撞击力会产生强迫振动,树上的桑葚便会以某个 频率振动,它们会受到一个惯性力做加速运动,当惯性力大于桑葚与树枝的结合力 时,桑葚会就与桑葚树在连接较弱处断裂,从而实现桑葚的采摘,完成分离的过程。 设计方案:电动机驱动,皮带轮传动,通过减速器的减速作用之后将力矩传递 给偏心盘机构,偏心圆盘转动产生一个偏心运动,引起连杆运动继而使推杆运动实 现撞击,将果实撞落下来 , 电动机的输出转速和功率想对于汽油机都比较容易控制, 而且电动机机械能的转化率比较高,因此用电动机是合理的。 在充分研究和了解国内机械采摘装置的基础上,通过对国内机械采摘方式的对 比,决定设计撞击式桑葚采摘机进行采摘作业,本机基于曲柄滑块原理,由实际工 作的需要估计撞击力平均为 620N ,撞击的平均速度为 0.7m/s,(撞击所需要的功率 为0.43kw),推杆的行程60mm,偏距为40mm,急回特性系数 K=1.5(θ =36°)、k=1.5, θ =180° k-1/k+1=36°。由此可通过计算得曲柄长度和连杆长度分别为 42mm,92mm, 偏心盘转速为210r/min,采摘机所需功率为0.43 kw。
带传动设计
a=a'+(L-L')/2=700+(2000-2043)/2=678.5mm 调节范围 a₁=a-0,015L=648.5mm a₂=a+0.03L=738.5mm 求小带轮上的包角 α ₁=180°-(d₂-d₁)/a × 5.求v带根数 Z≥P₁/(P。+△P。)·K₁·K₂ 由表查得 P。=2.61kw k₁=0.962kw k₂=0.96kw △P。=0.56kw Z≥0.6/(2.61+0.56)×0.962×0.96=2,56 取Z=3 180°/π =163.1°〉120°可行
直齿圆柱齿轮传动设计
7.齿轮齿数的选择 Z₁=25,Z₂=i· Z₁=54 8.按齿根弯曲疲劳强度设计 m≥Am³√T₃/(Ψ ·Z₃²)·Yfa·Ysa/[σ f] 系数Am=1.4(查表得,Am=1.34~1.59) 齿形系数Yfa₁=2.85,Yfa₂=2.25 应力修正系数Ysa₁=1.52 Ysa₂=1.76 查表得σ f lim₁=σ f lim₂=734.48N/M [σ f ₁]=[σ f ₂]=0.7σ lim=0.7×734.48=514N/mm² m≥1.4³√﹙9.58×2.85×2.25)/(0.6×25²×514)=2.86 查表取m=3 分度圆直径d₁=mZ₁=75mm d₂=mZ₂=162mm 中心距 a=½(d₁+d₂)=118,.5mm 齿宽 b=Ψ d₁=45mm 取b₁=45 mm b₂=40mm 圆周速度v=﹙π ×75×458.75﹚/60000=0.83m./s
撞击式桑葚采摘机总装图
曲柄长度、连杆长度设计
由实际工作需要估计撞击力平均为 620N,撞击的平均速度为 0.7m/s,(撞击所需 要的功率为0.43kw),推杆的行程60mm,偏距为40mm,急回特性系数K=1.5(θ =36°) 由此可以计算得到曲柄长和杆长。
偏置曲柄滑块机构 图
计算曲柄、连杆长时所用的图
国内研究现状与分析
目前国内水果采摘作业基本上都是人工进行,其费用约占成本的 50%-70%, 并且时间较为集中。近年来,国外果园的机械采摘大多是采用振动式采摘机。振 动式采摘机可根据采摘原理大致分为气力振动采摘机和机械振动采摘机。 机械振动采摘机又可分为两种,一是机械推摇振动采收机,一是机械撞击采 收机。目前果园的机械式采摘主要有振摇式、撞击式和切割式三种类型。振摇式 是利用外力使树体或树枝发生振动或振摇,使果实产生加速度,在连接最弱处与 果枝分离而掉落。撞击式是撞击部件直接冲撞果枝或撞击主干来振落果实。切割 式是将树枝或果柄切断使果实与果树分离的方式,又分为机械切割式和动力切割 式。
带传动设计
3.求带速 V=(π·d₁·n)/(60×1000)=(π×100×1390)/(60×1000)=7.28m/s<25m/s 4.求中心距、带长和小带轮包角。 由 0.7(d₁+d₂)<a<2(d₁+d₂﹚
0.7(100+300)<a<2(100+300) 得280<a<800mm 初取 a'=700mm L'=2a'+π/2(d₁+d₂)+(d₂-d₁)²/4a'=2043mm 由图选取带长L=2000mm
撞击式桑葚采摘机设计
毕业设计主要内容
1.研究的背景、意义及现状 2.撞击式桑葚采摘机结构设计与工作原理 3.减速器的设计以及采摘机构总体传动方案的评述 4.主要部件的校核
5.总结
研究背景与意义
中国的水果产量约占全球总产量的16%,中国不仅是生产水果的大国,也是消费水 果的大国,目前林果种植业对采收机械化的需求很大,采摘机构的研发和设计有不错 的市场前景和很大的发展空间,特色林木果品属于劳动密集型农产品,竞争优势显著, 国内外对此需求很大。近几年来我国特色果品无论从种植面积还是总体的产量来说都 在不断增加,果品的出口量每年都在递增,一些极具特色的果品培育基地从规模和数 量来说在与日俱增,正在快速发展。 我国水果采摘业绝大多数还依赖于人工,由于果实成熟的时间短,就几个月的时 间,整个工作周期劳动强度很大,农民手工采摘时不仅要付出大量的时间和精力,而 且稍有不慎就会损伤果实降低果品质量,效率不高,如果采摘不及时还会造成经济上 的损失。撞击式桑葚采摘机作为我国林果产业研究的一部分,它能够快速高效地采摘 桑葚,相比于人工采摘效果较好,它克服了人工采摘效率过低的缺点,降低了桑葚的 采摘成本,减轻了果农的劳动强度,缩短了整个采摘环节所花费的时间。 本装置设计目的:实现采摘桑葚机械化,提高采摘桑葚的效率,降低其成本
桑葚采摘机下箱体设计图
桑葚采摘机机盖设计图
相关减速器的设计
减速器传动方案的评述 第一个方案:一级带传动和一级闭式圆柱齿轮传动
Hale Waihona Puke 优点:传动平稳,结构简单,加工制造较容易,可将轴分布在不同的平面上以减少外形尺 寸,带传动可以适应繁重的工作要求与恶劣的工作环境,齿轮相对轴承不对称,载荷沿齿 向分布不均匀,轴需有较大刚度。
带传动设计
1.选择V 带型号 由公式P₁=K·P₂确定带传动的计算功率 查得 k=1.2 而p=0.5kw P₁=1.2×0.5=0.6KW 结合n=1390r/min 由图可选取窄V 带SPA 2.确定带轮直径 由表的注2选取d₁=100mm d₂=i×d₁=3×100=300mm(符合标准系列)
第二个方案:采用闭式一级传动 缺点:长期连续运转条件下,蜗杆传动效率低,功率损失大,不经济。所以减速器的设计 选择方案一,原动机通过带传动和一级圆柱齿轮传动来实 现相应转速的调控。 电动机的选择 (一)电动机工作条件:按工作要求和条件:载荷较平稳,三相交流电,选用三相笼型异 步电动机,Y型,灰尘较大,所以选用封闭式结构。 (二)选择电动机的容量 电动机所需要的功率 P=0.7 ×620N=0.43 0.43 /(0.96×0.96×0.96×0.96×0.98)=0.53 (0.96为轴承传递效率,0.98为一对齿轮传递效率 0.96为带传动效率)