线性离散系统数学模型
线性离散系统数学模型和分析方法

线性离散系统数学模型和分析方法目录一、内容简述 (3)二、线性离散系统的数学模型 (3)2.1 离散系统的概念 (5)2.2 离散系统的描述方法 (6)2.2.1 差分方程 (7)2.2.2 马尔可夫过程 (8)2.2.3 状态空间表示 (10)2.3 线性离散系统的特性 (11)2.3.1 稳定性分析 (12)2.3.2 脉冲响应与收敛性 (13)2.3.3 系统性能评估 (14)三、分析方法 (16)3.1 拉普拉斯变换法 (17)3.1.1 基本概念 (19)3.1.2 应用分析 (20)3.1.3 收敛性与应用局限 (21)3.2 状态空间方法 (23)3.2.1 基本理论 (24)3.2.2 控制器设计 (25)3.2.3 参数估计 (26)3.3 Z变换法 (27)3.3.1 基本原理 (28)3.3.2 系统分析 (30)3.3.3 系统的性能评估 (31)3.4 时域分析方法 (33)3.4.1 序贯逼近法 (34)3.4.2 数值仿真 (34)3.4.3 基于数字模型的算法 (36)四、应用实例 (37)4.1 控制系统设计 (39)4.1.1 系统建模 (40)4.1.2 控制器设计与仿真 (42)4.2 信号处理 (43)4.2.1 离散信号处理 (45)4.2.2 滤波器设计 (46)4.3 通信系统 (47)4.3.1 调制与解调 (49)4.3.2 语音编码与加密 (51)五、结论与展望 (52)5.1 研究成果总结 (53)5.2 未来研究方向 (54)5.3 实际应用前景 (55)一、内容简述本文档旨在全面介绍线性离散系统数学模型的构建及其分析方法。
线性离散系统在现代科技、工程和经济学等领域具有广泛的应用,因此对其数学模型的理解和分析显得尤为重要。
我们将从线性离散系统的基本概念出发,详细阐述线性离散系统的定义、特点以及类型。
通过实例演示如何建立线性离散系统的数学模型,包括状态方程、传递函数等基本形式。
离散时间系统的数学模型—差分方程
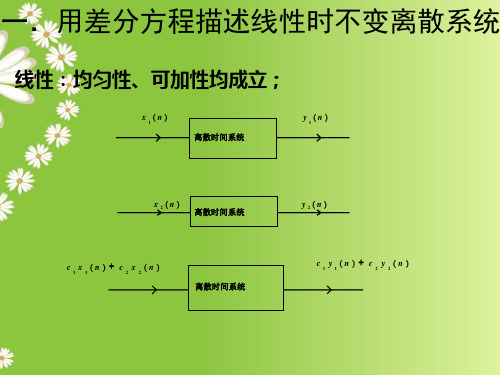
一.用差分方程描述线性时不变离散系统
线性:均匀性、可加性均成立;
x (n) 1
离散时间系统
y (n) 1
x 2 ( n ) 离散时间系统
c x (n ) + c x (n )
x1n+ x2n
x2 n
乘法器:
x1n x1n+ x2n
x2 n
x1 n
x1n x2 n
x2 n
系统框图
乘法器
xn
延时器
axn
a
yn
1
yn 1
E
xn a axn
yn
yn 1
z 1
五.差分方程的特点
(1)输出序列的第n个值不仅决定同一瞬间的输入样值, 而且还与前面输出值有关,每个输出值必须依次保留。
11
22
离散时间系统
y2 (n )
c y (n ) + c y (n )
11
22
时不变性
xn yn,xn N yn N 整个序列右移 N位
x(n)
y(n)
1 1 0 1 2 3 n
1
系统
1 o 1 2 3 4 n
x(n N )
y(n N )
1
1
系统
1 0 1 2 3
yt ynT yn
f t f nT f n
yn yn 1 ayn+ f n
T
yn 1 yn 1+ T f n
1 aT
1 aT
当前输出 前一个输出 输入
离散系统的数学模型-浙江大学控制科学与工程学院
连续状态空间模型离散状
Ø
*(t)连续状态空间模型
⎧
x(k
例7-3-9 ,求其离散方程(含零阶保持)解:
1) 离散状态方程本质上是一阶差分方程组,故求其解也与求差分方程解一样有两种方法:递推法与
Ø
直接将初始条件
令Φ(
Øz z () X
解:1)用递推法代入不同的例7-3-10 x x ⎢⎣⎡
解:例7-3-10 x x ⎢⎣⎡
X
1)
Ø由差分方程
y
例:,求脉冲传递函数解:作
零初始条件
Ø
若已知控制器的脉冲传递函数须将
2) Ø
例7-3-11
⎤
u
(k
)
解:
Ø
Ø
现问题
Ø
分解)、
信号流图等工具也可以采用Ø
Ø能控标准型和能观标准型
G (z )==⎢⎢⎢⎡=A
Ø例7-3-12 解:1(21k y x x ⎢⎣⎡
Ø正则标准型(并联分解):适用于脉冲传递函数为部分分式形式,
基本单元:
Ø例7-3-12 解:
(D z
Ø:适用于脉冲传递函数分子分母均为因式分解形式一阶环节基本单元
例7-3-12
解:
状态变量图
Ø例7-3-12
解:
状态变量图
例7-3-13
解:特征方程的根:
)(z D e
) (k
3) 差分方程和状态方程Ø
Ø
例7-3-14
4) •例
(G 12(((x x y k (e k。
离散系统的数学模型

离散系统的数学模型
1.1 离散时间系统的数学模型
为激励信号,
为响应信号
离散时间系统 将激励序列转换为响应序列的系统,其 输入输出都是离散信号。在数学上,离 散系统的输入-输出关系可表示为
离散系统可以用差分方程来描述 差分方程 由输入序列、输出序列以及它们的差分所组
成的方程。 例如:
无反馈差分方程 某ຫໍສະໝຸດ 时刻的输出只与输入有关,而余 ,月利率为1%。写出结余 与净存款
的
关系式。
解: 当月的净存款
月末结余
月末利息
所以有
或
例5.3.2 试写出第k 节点电压 的数学模型。
解: 整理得
例5.3.3 假设离散时间系统的差分方程为 求其传输算子
解:算子方程为 即
所以
离散系统的模拟框图表示
差分方程的基本元算符号
例5.3.4 某离散系统的差分方程为
与该时刻之前的输出无关 。
有反馈差分方程 某一时刻的输出不仅与输入有关,还 与该时刻之前的输出有关。
系统的差分方程的一般形式 :
前向差分方程
后向差分方程
差分算子 离散系统的传输算子
差分方程 算子方程
传输算子
系统的输入-输出模型
1.2离散时间系统数学模型的建立
例5.3.1 某一银行按月结余。设第 个月末的结
试用模拟框图表示此系统。 解:系统的差分方程可化为 框图来表示为
信号与系统
离散系统的数学模型
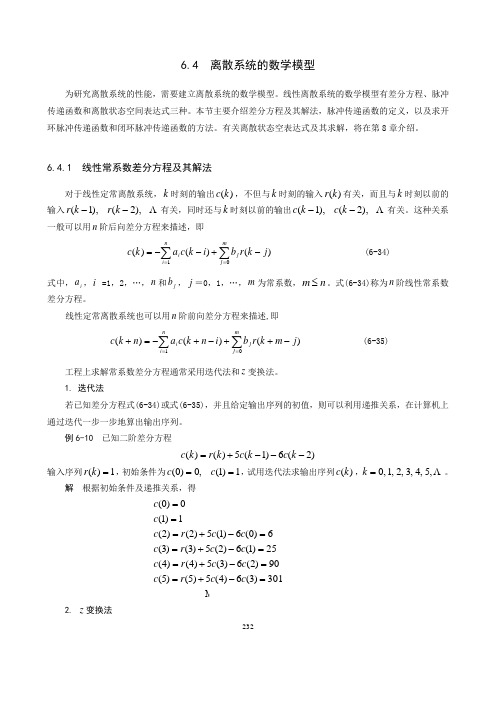
2326.4 离散系统的数学模型为研究离散系统的性能,需要建立离散系统的数学模型。
线性离散系统的数学模型有差分方程、脉冲传递函数和离散状态空间表达式三种。
本节主要介绍差分方程及其解法,脉冲传递函数的定义,以及求开环脉冲传递函数和闭环脉冲传递函数的方法。
有关离散状态空表达式及其求解,将在第8章介绍。
6.4.1 线性常系数差分方程及其解法对于线性定常离散系统,k 时刻的输出)(k c ,不但与k 时刻的输入)(k r 有关,而且与k 时刻以前的输入 ),2(),1(--k r k r 有关,同时还与k 时刻以前的输出 ),2(),1(--k c k c 有关。
这种关系一般可以用n 阶后向差分方程来描述,即∑∑==-+--=mj jni i j k r bi k c a k c 01)()()( (6-34)式中,i a ,i =1,2,…,n 和j b ,j =0,1,…,m 为常系数,n m ≤。
式(6-34)称为n 阶线性常系数差分方程。
线性定常离散系统也可以用n 阶前向差分方程来描述,即∑∑==-++-+-=+mj jni i j m k r bi n k c a n k c 01)()()( (6-35)工程上求解常系数差分方程通常采用迭代法和z 变换法。
1. 迭代法若已知差分方程式(6-34)或式(6-35),并且给定输出序列的初值,则可以利用递推关系,在计算机上通过迭代一步一步地算出输出序列。
例6-10 已知二阶差分方程)2(6)1(5)()(---+=k c k c k r k c输入序列1)(=k r ,初始条件为1)1(,0)0(==c c ,试用迭代法求输出序列)(k c , ,5,4,3,2,1,0=k 。
解 根据初始条件及递推关系,得0)0(=c 1)1(=c6)0(6)1(5)2()2(=-+=c c r c 25)1(6)2(5)3()3(=-+=c c r c 90)2(6)3(5)4()4(=-+=c c r c301)3(6)4(5)5()5(=-+=c c r c2. z 变换法233设差分方程如式(6-34)所示,对差分方程两端取z 变换,并利用z 变换的实数位移定理,得到以z 为变量的代数方程,然后对代数方程的解)(z C 取z 反变换,可求得输出序列)(k c 。
离散时间系统的数学模型

2.线性差分方程 a0(n)y(n)+ a1(n)y(n-1)+ …... aN(n)y(n-N)
= b0(n)x(n)+ b1(n)x(n-1)+ …... bM(n)x(n-M) 其中ai(n) 、bj(n)、 x(k) ,i=0,1,……N; j=0,1,……M; k=n-M,……n。
返回
二、差分方程
在连续时间系统中,系统内部的数学运算关系可归结 为微分(积分)、乘系数、相加的关系,即:微分方程。
在离散时间系统中,基本运算关系是延时(移位)、 乘系数、相加的关系,即:差分方程。 这是由于系统的组成以及所处理的信号的性质不同, 因此描述系统的数学手段也不同。
(一)数学模型的基本单元 (二)差分 (三)差分方程 (四)差分方程的建立 (五)差分方程的特点
i
2
2
d i un
n
n
i
n
in+1 u n u
n
1 iu i n n + 1 u n 2 i
i
1 2 i u i n n + 1 2 n + 1 u n 6 i
n + 1 1 a i a u i u n 1 a i n
xi xn
n
a 1
返回
(三)差分方程
1.一般差分方程
ky(n))=0 表达式F(n,y(n), y(n), …… 或 Q(n,y(n), y(n-1), ……, y(n-k))=0 称为未知序列y(n)的差分方程,F、Q是已知函数。
k
(k阶差分)
3.典型序列的差分(后向) n = n -(n-1)=1 u(n) = u(n) -u(n-1)=d (n) n2= n2 -(n-1)2= 2n - 1 n2u(n) = n2u(n) - (n-1)2u(n-1)= (2n-1)u(n-1) 2 n 1 sin n sin n sin n 1 2 sin cos 4.差分的逆运算———求和 典型序列的求和
线性离散系统的数学模型
解 :k 0 y(1) ay(0)bu(0)
k 1
y(2) ay(1)bu(1) a2y(0)abu(0)bu(1)
k1
y(k) ak y(0) ak1ibu(i) 通 解特 解
i0
线性离散系统的数学模型
解法二:解析法——差分方程通解求法
y ( k n ) a 1 y ( k n 1 ) a n y ( k ) b 0 u ( k m ) b 1 u ( k m 1 ) b m u ( k )
➢第二种形式:称为 (n,m) 阶差分方程,其中 m≤n,是在输入 输出的最低阶上统一。
y ( k n ) a 1 y ( k n 1 ) a n y ( k ) b 0 u ( k m ) b 1 u ( k m 1 ) b m u ( k )
连续定常系统的 n 阶微分方程(m≤n)
m0 线性离散系统的数学模型
例 3-3-1 已 知 离 散 系 统 脉 冲 响 应 h(k),求 在 u*(t)1*(t) 作 用 下 系 统 的 输 出 y*(t)。
1,k0 u*(t)1*(t) 0,k0
解: 由卷积和公式:
k
y(k) u(k)* h(k) u( j)h(k j) j0
k
3.2.2 差分方程解 =通解+特解
➢ 通解是齐次方程的解,为零输入解,代表系统在无外力 作用下的自由运动,反映了离散系统自身的特性。
➢ 特解是由非零输入产生的解,对应于非齐次方程的特解, 反映了系统在外作用下的强迫运动。 差分方程求解有两种方法:解析法与递推法。
线性离散系统的数学模型
解法一:递推法——从初始值递推求解
数 学 模
连续系统 微分方程 脉冲过渡函数
—— ——
离散控制系统的数学模型

即
Y (z)
z2
z 3z
2
(z
z 1)( z
2)
利用反演积分法求出z反变换,得 y(k) 1 2k k 0,1, 2,
y(t) (1 2k ) (t kT ) k 0
1.2 脉冲传递函数
1.脉冲传递函数定义
在线性定常离散控制系统中,当初始条件为零时,系统离散输出信号的z
变换与离散输入信号的z变换之比,称为线性定常离散控制系统的脉冲传递函
R(z) 1 G1 (z)HG2(z)
自动控制原理
例1-13 试用z变换法求解下列二阶前向差分方程 y(k 2) 3y(k 1) 2y(k) 0
其中,初始条件为 y(0) 0, y(1) 1 。
解:对方程两端取z变换,得
z2Y (z) z2 y(0) zy(1) 3zY (z) 3zy(0) 2Y (z) 0
即 (z2 3z 2)Y (z) y(0)z2 ( y(1) 3y(0))z 代入初始条件,得 (z2 3z 2)Y (z) z
(2)串联环节之间无采样开关时
设开环离散系统如图1-18所示,在两个串联连续环节G1(s)和G2(s)之间没 有理想采样开关。此时系统的传递函数为 G(s) G1(s)G2 (s)
上式作为一个整体进行z变换,由脉冲传递函数定义得
G(z)
Y (z) R(z)
G1G2 (z)
图1-18 环节之间无理想采样开关的开环采样系统
自动控制原理
离散控制系统的数学模型
1.1 线性常系数差分方程
对于线性定常离散控制系统,一般可用n阶后向差分方程描述,即
n
m
y(k) ai y(k i) bir(k j)
i 1
j 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
h*(t) h*(t)
离散系统
t
t
根据线性系统叠加原理,已知h* (t)后,任意输入脉冲序列u* (t), 可得系统输出为
y * (t) u(0)h* (t) u(1)h* (t T ) u(n)h* (t nT )
3.3 脉冲响应与卷积和
Impulse Response —— Convolution Summation
设系统输入为单位脉冲序列
d
*
(t)
1, k 0, k
0 0
其输出脉冲序列 h * (t )称为系统的脉冲响应,也称权序列
( weighting sequence )。
δ*(t) δ*(t)
➢第二种形式:称为 (n,m) 阶差分方程,其中 m≤n,是在输入 输出的最低阶上统一。
y(k n) a1 y(k n 1) an y(k) b0u(k m) b1u(k m 1) bmu(k)
连续定常系统的 n 阶微分方程(m≤n)
dn
d n1
d
dm
d m1
d
dt n y(t) a1 dt n1 y(t) an1 dt y(t) an y(t) b0 dt m u(t) b1 dt m1 u(t) bm1 dt u(t) by (n1) an y(t ) 0
它的特征方程为 x n a1 x n1 a2 x n2 an 0
有n个特征 根: (1) 若 解 为 n个 单 根 x1 , x2 , , xn ,则 方 程 通 解 为 :
y(t ) c1e x1t c2e x2t cne ; xnt (2)若解有m重根,则m重根的 解的形式 为
例 y(k 2) 2 y(k 1) 5 y(k) 0,求通解。 解 : 特 征方 程 r 2 2r 5 0, 有 一 对 共 轭 复 根 1 j2 5e jarctg2, 则通解为 y(k) c1 (1 j2)k c2 (1 j2)k。
例 y(k 2) 4 y(k 1) 4 y(k) 0,求通解。 解:特征方程 r 2 4r 4 0,有二重根 2, 则通解为 y(k) c1 (2)k c2k(2)k。
i0
i 1
例3 2 2 y(k 1) ay(k) bu(k),设y(0)、u(k)已 知 , 用 递 推 法 求 解 解 :k 0 y(1) ay(0) bu(0)
k 1 y(2) ay(1) bu(1) a 2 y(0) abu(0) bu(1)
k 1
y(k) a k y(0) a k1i bu(i) 通 解 特 解 i0
e xt , te xt , t 2e xt, ,t m1e xt的 线 性 组 合 , 通 解 中 的 系 数cn由 系 统 的 初 始 条 件 确 定。
例 已知y(k 2) 3 y(k 1) 2 y(k) 0, 初始条件y(0) 0,y(1) 1,求解。 解:特征方程 r 2 3r 2 0,有两实根 1, 2, 则通解为 y(k) c1 (1)k c2 (2)k。 代入初始条件可得c1 1, c2 1, 则解为 y(k) (1)k (2)k。
数 学 模
连续系统 微分方程 脉冲过渡函数
—— ——
离散系统 差分方程 脉冲响应
型 S传递函数
—— Z传递函数
状态空间表达式 —— 离散状态空间表达式
主要内容: ➢线性定常离散系统的四种数学模型及其互相转换; ➢线性定常离散系统的求解方法。
3.2 线性常系数差分方程(时域表达式)
——Difference Equation
3.2.2 差分方程解 =通解+特解
➢ 通解是齐次方程的解,为零输入解,代表系统在无外力 作用下的自由运动,反映了离散系统自身的特性。
➢ 特解是由非零输入产生的解,对应于非齐次方程的特解, 反映了系统在外作用下的强迫运动。
差分方程求解有两种方法:解析法与递推法。
解法一:递推法——从初始值递推求解
3.2.1 差分方程表达式
➢第一种形式:表示 y(kT) 与本时刻及前 m 个时刻输入、前 n 个时刻的输出有关,称为 n 阶常系数差分方程,是在输入输 出的最高阶上统一。
y(k) a1 y(k 1) a2 y(k 2) an y(k n) b0u(k) b1u(k 1) bmu(k m)
解法二:解析法——差分方程通解求法
y(k n) a1 y(k n 1) an y(k) b0u(k m) b1u(k m 1) bm u(k)
它的齐次方程为 y(k n) a1 y(k n 1) an y(k) 0
它的特征方程为 r n a1r n1 a2r n2 an 0 有n个 特 征 根 : (1) 若 解 为 n个 单 根 r1 , r2 , , rn ,则 方 程通 解 为 :
第3章 线性离散系统数学描述
本章阐述线性定常离散系统的数学描述及其求解方法, 它们是分析和设计数字控制系统的基础。
3.1 引言
离散系统( Discrete System ),又称离散时间系统 (Discrete-Time System ) 。本章研究线性定常离散系统的 数学描述及求解方法,这是分析和综合数控系统的基础。
y(k ) c1r1k c2r2k cnrnk; (2) 若 解 有m重 根 , 则m重 根 的 解 的 形 式 为
r k , kr k , k 2r k, ,k m-1r k的 线 性 组 合 ,
通
解
中
的
系
数c
由
n
系
统
的
初
始
条
件
确
定。
➢特解求法——试探法,略
对照:连续系统微分方程解析法求通解
y(k) a1 y(k 1) an y(k n) b0u(k) b1u(k 1) bmu(k m)
y(k) b0u(k) b1u(k 1) bm u(k m)
[a1 y(k 1) an y(k n)]
m
n
bi u(k i) ai y(k i)