水电站本体仿真建模分析
某电站50 MW水轮发电机数学建模和仿真分析

2020年第12期2020Number12水电与新能源HYDROPOWERANDNEWENERGY第34卷Vol.34DOI:10.13622/j.cnki.cn42-1800/tv.1671-3354.2020.12.012收稿日期:2020-09-05作者简介:柳呈祥ꎬ男ꎬ助理工程师ꎬ主要从事水电站励磁㊁直流系统调试㊁检修㊁维护工作ꎮ某电站50MW水轮发电机数学建模和仿真分析柳呈祥ꎬ张元栋ꎬ程诗龙ꎬ黄柯维(中国长江电力股份有限公司三峡水力发电厂ꎬ湖北宜昌㊀443133)摘要:以某电站50MW水轮发电机组为研究对象ꎬ对电机进行了模型参数计算ꎬ建立了发电机的数学模型ꎻ应用Matlab软件中的simulink工具ꎬ以建立的数学模型为基础搭建了凸极水轮发电机仿真模型ꎬ并对所建模型并网后的运行特性进行仿真研究ꎬ验证了所建模型的正确性ꎮ关键词:水轮发电机ꎻ参数计算ꎻMatlabꎻ数学模型中图分类号:TM312㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1671-3354(2020)12-0049-05MathematicalModelingandSimulationAnalysisofa50MWHydro ̄turbineGeneratorUnitLIUChengxiangꎬZHANGYuandongꎬCHENGShilongꎬHUANGKewei(ThreeGorgesHydropowerPlantꎬChinaYangtzePowerCo.ꎬLtd.ꎬYichang443133ꎬChina)Abstract:Amathematicalmodelisconstructedfora50MWhydro ̄turbinegeneratorunitandthemodelparametersarecalculated.ThenꎬasimulationmodelisdevelopedinSimulinktoolboxinMatlabbasedonthemathematicalmodel.Theoperationcharacteristicsofthemodelaresimulatedandthecorrectnessofthemodelisverified.Keywords:hydro ̄turbinegeneratorunitꎻparametercalculationꎻMatlabꎻmathematicalmodel㊀㊀同步发电机是电力系统的心脏ꎬ直接影响电力系统的的稳定运行ꎮ由于电机非线性㊁强耦合㊁多变量的特点ꎬ电机的动态特性复杂ꎬ而电机的动态性能对电力系统的动态稳定非常重要ꎬ所以对电机的模型进行深入的研究是十分必要的[1]ꎮ对于同步电机的数学模型主要有abc轴和dq轴两种参考坐标系ꎬabc坐标系可以完整反映气隙基波和谐波磁场的电磁关系ꎬ但是电感参数变化会给此坐标系下的计算和分析造成不便ꎻdq轴坐标系只计基波磁场的作用ꎬ可以实现定子绕组㊁转子绕组和阻尼绕组的电感解耦ꎬ目前来说ꎬ通常采用dq轴坐标进行电机建模ꎮ本文以某电站凸机同步发电机为例ꎬ建立了发电机在dq轴下的数学模型ꎬ并对此模型进行了Matlab/Simulink仿真ꎬ最后对仿真波形进行分析ꎬ验证了模型的正确性ꎮ1㊀发电机数学模型1.1㊀dq坐标系下的电机有名值方程为了建立同步发电机模型ꎬ必须对实际电机作必要的简化假设:1)定子三相绕组结构上完全相同ꎬ在空间上相差120ʎ电角度ꎮabc三相绕组对其轴线而言结构对称ꎮ2)电机转子在结构上是完全对称的ꎮ转子各绕组如果有电流i流过ꎬ只考虑正弦基波分量ꎮ3)对于电机沿直轴或交轴的磁路ꎬ如果磁势波是对称于直轴或交轴正弦分布的ꎬ则磁密波也对称于直轴或者交轴正弦分布ꎬ或者说对于磁密波只计其基波分量[2]ꎮdq坐标系下的电机暂态方程适应转子的旋转和凸极效应ꎬ所以一般选用dq坐标系建模ꎮ电压和磁链方程如下ꎮ94水电与新能源2020年第12期电压方程:ud=pψd-ωψq-riduq=pψq+ωψd-riquf=pψf+rfif0=pψD+rDiD0=pψQ+rQiQ(1)式中:ud㊁uq㊁uf分别为dq轴电压和励磁绕组的电压ꎻψd㊁ψq㊁ψf㊁ψD㊁ψQ分别为各绕组磁链ꎻid㊁iq㊁if㊁iD㊁iQ分别为各绕组中流过的电流瞬时值ꎻr㊁rf㊁rD㊁rQ分别为各绕组电阻ꎻω为转子电角速度ꎻp为微分算子ꎬp=ddtꎮ磁链方程:㊀ψdψFψDæèçççöø÷÷÷=LdMfMDKMfLfMRKMDMRLDéëêêêêùûúúúú-idifiDéëêêêêùûúúúú㊀ψqψQæèçöø÷=LdMQKMQLQéëêêùûúú-idiQéëêêùûúú(2)式中:Ld㊁Lq分别为dq同步电感系数ꎻLf㊁LD㊁LQ分别为励磁和阻尼绕组自感系数ꎻMR为励磁和阻尼D绕组自感系数ꎻMf㊁MD㊁MQ分别为定子和转子绕组互感系数幅值ꎮ1.2㊀dq坐标系下的标幺值方程用有名值来进行同步电机的分析时ꎬ存在量级差异较大的情况ꎬ用归算到自身容量基值下的标幺值表示则更加合理ꎮ因此ꎬ对电机有名值方程还需进行标幺化ꎮ对有名值方程进行规范化的过程就是标幺化的过程ꎬ首先要确定有关变量的基准值ꎮ发电机定子侧基准电压UB㊁基准电流IB㊁基准容量SB㊁基准频率fB和基准角频率ωB为[3]㊀㊀UB=2UR㊀㊀IB=2IR㊀㊀SB=SR=3URIR=32UBIB㊀㊀fB=50Hz㊀㊀ωB=2πfb式中:UR为发电机额定相电压有效值ꎻIR为发电机额定相电流有效值ꎻSR为发电机额定容量ꎮ定子侧绕组基准磁链ψB㊁基准自感系数LB和时间基准值tB关系为ψB=UBtBψB=LBIB转子f㊁D和Q各绕组变量分别取以下基准值UfB=KFUBUDB=KDUBUQB=KQUBüþýïïïψfB=KFψBψDB=KDψBψQB=KQψBüþýïïïIfB=321KFIBIDB=321KDIBIQB=321KQIBüþýïïïïïïïSFB=SDB=SQB=SR式中:KF㊁KD为励磁和阻尼D绕组对定子d绕组的等效匝比ꎻKQ为阻尼Q绕组对定子q绕组的等效匝比ꎮ经过规范化后的磁链方程为ψdψBψfψfBψDψDBæèçççççççöø÷÷÷÷÷÷÷=LdLBMf23KFLBMD23KDLB23MfKFLBLf23KF2LBMR23KDKFLB23MDKDLBMR23KFKDLBLD23KD2LBéëêêêêêêêêêêêêêùûúúúúúúúúúúúúú-idIBif321KFIBiD321KDIBéëêêêêêêêêêêùûúúúúúúúúúúψqψBψqψQBæèççççöø÷÷÷÷=LqLBMQ23KQLB23MDKQLBLQ23KQ2LBLQéëêêêêêêêêùûúúúúúúúú-iqIBiQ321KQIBéëêêêêêêùûúúúúúú(3)由于电感标幺值与电抗标幺值相等ꎬ可以不区分ꎬ上式可改写为ψd∗ψf∗ψD∗æèçççöø÷÷÷=Xd∗Xad∗Xad∗Xad∗Xf∗XR∗Xad∗XR∗XD∗éëêêêêùûúúúú-idifiDéëêêêêùûúúúúψq∗ψQ∗æèçöø÷=Xq∗Xaq∗Xaq∗XQ∗éëêêùûúú-iqiQéëêêùûúú(4)电压方程为05柳呈祥ꎬ等:某电站50MW水轮发电机数学建模和仿真分析2020年12月ud∗=ddt∗(ψd∗)-ω∗ψq∗-r∗id∗uq∗=ddt∗(ψq∗)+ω∗ψd∗-r∗iq∗uf∗=ddt∗(ψf∗)+rf∗if∗uD∗=ddt∗(ψD∗)+rD∗iD∗=0uQ∗=ddt∗(ψQ∗)+rQ∗iQ∗=0(5)由于后续分析的电气量均为标幺值ꎬ将∗省略ꎮ电机参数一般以运算电抗和实用参数给出ꎬ其中dq轴运算电抗为Xd(p)=ψd-idXq(p)=ψq-iq由式(4)和(5)可求得:㊀㊀Xd(p)=Xd-B(p)A(p)A(p)=p2(XDXf-Xad2)+p(XDrf+XfrD)+rDrfB(p)=p2(XD+Xf-2Xad)Xad2+p(rf+rD)Xad2㊀㊀Xq(p)=X1+Xaq(XQ1+rQp)Xaq+(XQ1+rQp)(6)除以上电磁方程ꎬ还有转子运动方程2Hdωdt=Tm-TeTe=ψdiq-ψqid(7)式中:H为机组惯性时间常数ꎻTm为机械力矩ꎻTe为电磁转矩ꎮ2㊀标幺值选定和仿真参数计算表1为某电站发电机主要电气参数ꎬ由式(4)(5) (7)搭建电机模型需知道发电机定子绕组㊁转子绕组和阻尼绕组的电抗值㊁电阻值ꎬ还需知道机组惯性时间常数ꎮ由于建模采用标幺值系统ꎬ应对发电机电气参数进行标幺化ꎬ本节对发电机标幺值选定和发电机参数进行分析和计算ꎮ定子绕组基准值选择[4-5]SaB=SN=58.8MVAUaB=2UR=2ˑ10500/3=8573.2VIaB=2IR=4574.3A表1 发电机主要电气参数表项目额定工况发电机功率PN/MW50功率因数cosφN0.85发电机容量SN/MVA58.8额定电压UN/kV10.5额定电流IN/A3234.5额定转速nN/(r min-1)272.7额定频率fN/Hz50直轴同步电抗Xd(不饱和值)/p.u.1.058直轴瞬变电抗Xᶄd(不饱和值)/p.u.0.307直轴超瞬变电抗Xᵡd/p.u.0.203交轴同步电抗Xq/p.u.0.675交轴超瞬变电抗Xᵡq/p.u.0.214定子绕组漏抗X1/p.u.0.119d轴短路暂态时间常数Tᶄd/s1.962d轴开路暂态时间常数Tᶄd0/s6.76d轴短路次暂态时间常数Tᵡd/s0.0441d轴开路次暂态时间常数Tᵡd0/s0.0665q轴短路超瞬变时间常数Tᵡq/s0.0502q轴开路超瞬变时间常数Tᵡq0/s0.15796空载励磁电流If0/A593额定励磁电流IfN/A1067额定励磁电压UfN/V164定子绕组电阻Ra/Ω0.00645励磁绕组电阻Rf/Ω0.1307飞轮力矩GD2/tm21850faB=50HzωB=2πfB=314.16rad/sZaB=RaB=XaB=1.8742ΩLaB=XaB/ωB=5.966ˑ10-3HψaB=LaBIaB=27.29Wb励磁绕组基准值选择SfB=SfB=SN=58.8MVALdf=UBωBif|if=593A=0.04602HXad∗=Xad∗-X1∗=0.939IfB=XadIBωBLdf=(Xd-X1)IBωBLdf=556.8A15水电与新能源2020年第12期UfB=SBIfB=105.6kVZfB=RfB=XfB=189.7ΩLfB=XfB/ωB=0.6038HψfB=LfBIfB=336.2Wb定转子之间的互感基值选择LafB=23LaBLfB=0.049HLfaB=23LafB=0.0735H力矩基值TB=SaBωmB=npSaBωeB=11ˑ58.8ˑ106314.16=2.06ˑ106N m由电机实用参数可继续求解得到电机模型参数[6](由于模型建立在标幺值基础上ꎬ后续如无特别说明均省略符号∗):Xad=Xd-X1=0.939Xaq=Xq-X1=0.556Xf=Xad2Xd-Xᶄd=1.174XD=2.559XQ=0.671r=3.441ˑ10-3rf=5.528ˑ10-3rD=0.0865rQ=3.162ˑ10-3转动惯量J=14GD2ˑ103=462.5ˑ103kg m2机组惯性时间常数H=12JωmB2SaB=3.21s至此ꎬ电机仿真所需所有建模参数均已求得ꎮ3㊀仿真模型3.1㊀模型搭建如图1所示ꎬ按照前面两节的电机电压方程㊁磁链方程㊁功率方程㊁电磁力矩方程和转子运动方程搭建电机模型ꎮ明显地ꎬ当考虑定子绕组㊁转子绕组和励磁绕组的电磁暂态过程以及转子的机械过渡过程时ꎬ发电机为七阶模型ꎬ完整的反映了电机系统的物理特性ꎮ电机模型采用标幺值系统ꎬ与上节的计算和分析对应ꎮ励磁系统采用Simulink自带的ExcitionSystemꎬ控制方式为PID+PSS2Bꎮ变压器选择Three-phaseTrans ̄formerꎬ容量选择60MVAꎬ一二次侧电压为10.5kV/35kVꎮ输电线路选择3-PhaseSeriesRLCBranch(电阻0.003Ωꎬ电感为0.005H)ꎮ无穷大系统用3-phaseSource模块(10000MVA35kV)和3-phaseparallelRLCload模块组成ꎮ图1㊀发电机Simulink仿真模型图25柳呈祥ꎬ等:某电站50MW水轮发电机数学建模和仿真分析2020年12月3.2㊀仿真波形搭建好仿真模型后ꎬ可以对电机暂态过程进行模拟仿真ꎮ机械功率输出Pm=1(p.u.)ꎬ给定电压Vref=1(p.u.)ꎮ励磁电流If㊁励磁电压Uf㊁dq轴电压和电流㊁电磁功率Pe和输出功率Peo的仿真波形如图2-图4所示ꎮ图2㊀If㊁Uf㊁Ud和Uq仿真波形图(Pm=1ꎬVref=1)图3㊀id和iq仿真波形图(Pm=1ꎬVref=1)从图中可知ꎬ励磁电压㊁励磁电流随时间趋于稳定并达到额定值ꎮUd和Uq的稳定值分别为0.647(p.u.)和0.763(p.u.)ꎮUd2+Uq2稳定值刚好趋于图4㊀Pe和Peo仿真波形图(Pm=1ꎬVref=1)电压额定值ꎮ电磁功率和电磁输出功率趋于1(p.u.)ꎬ和给定的机械功率平衡ꎬ因为模型中未考虑摩擦转矩作用ꎬ这与理论分析的结果是一致的ꎮ综合以上发电机电气量仿真波形ꎬ本文搭建的发电机模型正确ꎬ可真实反映发电机电气和机械特性ꎮ4㊀结㊀语发电机系统是一个典型非线性㊁强耦合的高阶系统ꎬ动态性能复杂ꎬ所以对发电机的建模力求精确ꎮ本文介绍了建立发电机dq轴坐标系下数学模型的基本方法ꎬ接着对某电站的电机参数进行了分析和计算ꎬ搭建了基于实际凸机水轮发电机的模型ꎬ最后通过Mat ̄lab/Simulink仿真验证了模型的正确性ꎮ参考文献:[1]余贻鑫ꎬ陈礼义.电力系统的安全性和稳定性[M].北京:科学出版社ꎬ1988[2]黄家裕ꎬ岑文辉.同步电动机基本理论及其动态行为分析[M].上海:上海交通大学出版社ꎬ1989[3]高景德ꎬ张麟征.电机过渡过程的基本理论及分析方法[M].北京:科学出版社ꎬ1982[4]韩富春ꎬ闫根弟.暂态稳定数字仿真中发电机数学模型的研究[J].太原理工大学学报ꎬ2005ꎬ36(1):75-78[5]宋宏志.不同工况下大型水轮发电机电磁参数的计算[D].北京:华北电力大学ꎬ2011[6]倪以信ꎬ陈寿孙ꎬ张宝霖.动态电力系统的理论和分析[M].北京:清华大学出版社ꎬ200235。
水电站水机电系统仿真建模及动态特性分析
简化表示为
Gh(s)=Tw
T2ቤተ መጻሕፍቲ ባይዱs3
+24s 。
3T2rs2 +24
(2)
式中:Tw 为水流惯性时间常数;Tr为水击相长。
由式(1)可知,该模型存在 2个严重非线性环
节,即水轮机单位力矩特性函数 fM与单位流量特性 函数 fQ。由于该环节处理的好坏将直接影响到上述 水轮机非线 性 模 型 的 计 算 精 度,故 本 文 采 用 Ada
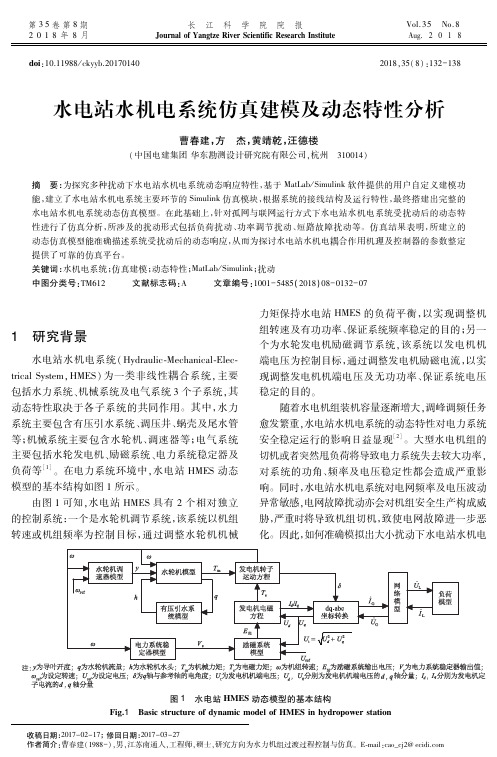
由图 1可知,水电站 HMES具有 2个相对独立 的控制系统:一个是水轮机调节系统,该系统以机组 转速或机组频率为控制目标,通过调整水轮机机械
力矩保持水电站 HMES的负荷平衡,以实现调整机 组转速及有功功率、保证系统频率稳定的目的;另一 个为水轮发电机励磁调节系统,该系统以发电机机 端电压为控制目标,通过调整发电机励磁电流,以实 现调整发电机机端电压及无功功率、保证系统电压 稳定的目的。
随着水电机组装机容量逐渐增大,调峰调频任务 愈发繁重,水电站水机电系统的动态特性对电力系统 安全稳定运行的影响日益显现[2]。大型水电机组的 切机或者突然甩负荷将导致电力系统失去较大功率, 对系统的功角、频率及电压稳定性都会造成严重影 响。同时,水电站水机电系统对电网频率及电压波动 异常敏感,电网故障扰动亦会对机组安全生产构成威 胁,严重时将导致机组切机,致使电网故障进一步恶 化。因此,如何准确模拟出大小扰动下水电站水机电
第 35卷 第 8期 2018年 8月
长 江 科 学 院 院 报 JournalofYangtzeRiverScientificResearchInstitute
doi:10.11988/ckyyb.20170140
Vol.35 No.8 Aug.2 0 1 8
水电站蜗壳保压浇混凝土结构的三维仿真分析
水电站蜗壳保压浇混凝土结构的三维仿真分析摘要三峡工程水电站厂房蜗壳采用保压浇外围混凝土的结构形式。
为研究钢蜗壳与外围混凝土交界面的接触性态,分别对冬季和夏季浇混凝土情况进行了模拟施工过程的三维有限元仿真计算,给出了交界面在不同季节不同水位运行期的传力和间隙,结果表明温度对传力的影响显着。
对冬季浇筑情况,研究了通过提高保压水温来减小高温季节高水位运行期的传力;对夏季浇筑情况,研究了通过降低保压水头来减小蜗壳混凝土在低温季节低水位运行期的间隙。
关键词蜗壳保压浇混凝土温度效应仿真分析三维有限元法温度变化引起的混凝土和钢蜗壳间的不协调温度变形会影响两者间的相互作用,这种相互作用是随运行季节变化的,并与浇筑季节和保压水温有关,因此选择合适的浇筑季节和保压水温也同样重要。
若再考虑施工过程及混凝土弹模、徐变和水泥水化热随时间变化的影响,两者的相互作用实际上是十分复杂的,只有通过模拟施工过程的仿真计算才能分析清楚。
然而,通常都没有考虑温度的影响[1],模拟施工过程的仿真分析更是少见。
三峡水电站蜗壳采用保压浇混凝土的结构形式,装机高程57m.正常设计水位175m(考虑水击力的影响,相应内水压力为),初期运行水位135m,两者相差较大。
通过有关研究工作,设计采用的保压水头为70m.由于机组台数多和工期要求,可能在不同季节都会有机组施工。
一方面,由于保压水头较小,低温季节浇外围混凝土的机组在高温季节高水位运行时,混凝土结构承担的荷载较大;另一方面,由于初期运行水头较小,高温季节浇外围混凝土的机组在低温季节低水位运行时,钢蜗壳与混凝土将不能完全贴紧运行。
这两方面可分别采取提高保压水温和降低保压水头的措施。
为此,本文通过三维有限元仿真计算,分析冬、夏季浇筑外围混凝土情况,在不同季节、不同水位运行期钢蜗壳与外围混凝土交界面的传力或可能存在的间隙,并研究合适的保压水头和保压水温。
1 计算条件结构计算模型三峡工程挡水坝为混凝土重力坝,电站厂房为坝后式。
水利水电工程施工系统三维建模与仿真
基金项目:国家自然科学基金(50179023)和高等学校骨干教师资助计划资助项目。
收稿日期:2001- -第20卷 第2期计 算 机 仿 真2003年2月文章编号:1006-9348(2003)02-0086-06水利水电工程施工系统三维建模与仿真钟登华,周锐,刘东海(天津大学水利水电工程系,天津300072)摘要:该文基于GIS 平台,采用三维可视化技术,提出了实现水利水电工程施工系统三维可视化数字模型的构造与施工过程动态仿真的方法。
文中首先阐述了基于GIS 的三维可视化原理,接着探讨了三维可视化数字模型的构造方法,然后详细介绍了地形数字化技术,静态地物实体建模技术,动态实体模拟方法,以及施工过程动态仿真途径。
最后给出了几个应用实例,表明本方法具有较好的实用性。
关键词:地理信息系统;三维可视化;建模;动态仿真中图分类号:TP391.9 文献标识码:B1 前言水利水电工程施工是一个复杂的系统工程,涉及到主体工程建筑物施工、临时挡泄水建筑物施工、水位变化等各个方面,其关系错综复杂。
以往的水利水电工程施工设计过多地依赖于设计图纸,设计成果一般表现为2D 的平面图、剖面图等形式,不够形象直观,并且难以从宏观上把握施工全过程。
本文提出将地理信息系统(Geographic Information System ,GIS)技术引入水利水电工程施工三维可视化辅助设计中,实现了复杂工程施工系统三维地物模型的创建及施工过程的动态仿真,为设计人员提供了一种简便、直观的手段。
2 基于GIS 的三维可视化数字模型的构造2.1 基于GIS 的三维可视化原理可视化(Visualization)是将抽象数据表示转换成图形或图像图元表示的过程。
图元一般为点(Point)、线(Line)、面(Mesh)、体(Voxel)等,由这些图元构成可视化模型,然后对其进行绘制和显示。
现在流行的GIS 软件如MapInfo,Arc/Info 等,都具有强大的可视化功能。
水利水电工程动态模拟分析
水利水电工程动态模拟分析1引言随着我国改革开放的不断深入,社会经济的发展和人们的生活水平都有了不同程度的提高,水利水电工程在促进社会发展的过程中起到了重要的作用,我国加快了对水利水电工程的建设,尤其是近几年来,长江三峡水利枢纽、葛洲坝水电站等在建成投入使用,为经济的发展和人们的生活带来了极大的方便,是造福造民的大工程,在我国一个中小型的水利水电工程的建设都要耗资几亿甚至几十亿,大量资金的投入无疑牵动着我国的财政支出,也同时加大了国家和人们的对于水利水电工程的重视程度,所以在施工前要做好对整个施工系统的分析和检查,随着科技的发展,现在一种新型的技术,动态模拟技术备受设计人员的青睐。
2我国水利水电施工的过程中的现状因为水利水电工程不同于其他的建筑工程一样,他主要是在受到的水的影响较大,因为它主要是靠水来施工和运转的,但是我国由于四季变化明显,河流大多是呈现季节性变化,所以流域的季节性对工程的施工有很大的影响。
水利水电工程是一个大工程,其中任何的一部分出现了问题,或是由于汛期等原因造成的工期的延误,都会引发连锁反应,进而影响到整个水利枢纽工程能否发挥最大的效益。
同时在施工的过程中,每一道工序之间还存在着很大的相互作用,和其他的非施工问题的干扰因素的存在。
这些都给建筑施工埋下了隐患,在我国目前来说对于以上的研究还处在初级阶段。
我国是一个水旱灾害的多发国,严重影响着我国经济的发展和农民的安居乐业,所以加大水利水电工程的建设是很有必要的,鉴于我国在水利水电工程的建设中存在的问题分析,所以在水利水电工程施工前对施工系统进行分析和动态的模拟是工程建设顺利进行的保证。
3水利水电工程中施工系统的分析以及动态模拟本文主要是通过对施工工序中的主物元的概念,并且作为了分析的基础,来对水利水电工程中的系统的分析和动态模拟进行探究的。
在水利水电的施工中,土石方开挖体和混凝土等进行了主要的介绍。
3.1工序的主物元对于一个水利水电的施工工程来说,是由很多道工序组成的,并且这些所有的工序都是围绕着一个物元来进行的,这个物元就是工序主物元,对于每一个工序而言都是实际存在的,所以一般工序的主物元就指的是实实在在的实物,例如:混凝土的浇筑过程和石方开挖的过程,混凝土和石方就是这个主物元。
葛洲坝水电厂三维仿真系统讲解
导叶转臂
外形图
导叶臂
端盖压块
剖面图
端盖 分半键
剪断销
连接板
作用:
1. 连接控制环上导叶连杆和导叶; 2. 传递控制环的输出转矩,推动导叶开启或关闭;
控制环
控制环
接力器连 接处
导叶连杆
注:
1. 连接主接力器和导叶转臂; 2. 传递主接力器的输出力矩,推动导叶转臂转动; 3. 安装在支持盖的滑道上,与支持盖一起吊入机坑。
活动导叶安装
活动 导叶
基础
底环
1.将活动导叶分片吊入机坑,注意不得碰伤导叶工作面;
2.调整导叶位置,使得每个导叶基本垂直,待导叶调整完成 以后加装限位块。
与支持盖 接合部位
顶盖
导叶套筒 安装孔
作用:
1. 固定导水机构; 2. 承受机组轴向负载,并将负载传递到座环和水泥基础上,起到支撑机组
的作用。
发电机基本结构:
本发电机采用半伞型结构,推力轴承放置在水轮机顶盖 的支持架上,发电机定子机座上放置非负荷辐射式上机架, 用其支持水轮机受油器支架、永磁发电机、转速继电器和发 电机层盖板等。
水轮机概况
水轮机基本规格:
型号:ZZ500-LH-1020 最小水头:8.3M 转轮直径:10.2M 设计流量:825m3/s 飞逸转速:140转/分 导叶数:32
2. 将底环固定在水泥基 础上,保证其过流面与 座环和转轮室上环过流 面光滑过渡。
控制环 导叶连杆 活动导叶
导水机构
导叶套筒 顶盖
底环
作用:
1. 调节通过机组过流系统的水的流量,达到控制机组转速的目的; 2. 机组主要过流部件之一。
上轴颈 端面密封 叶面密封 下轴颈
水利枢纽模型仿真实验原理(一)
水利枢纽模型仿真实验原理(一)水利枢纽模型仿真实验1. 介绍•水利枢纽模型仿真实验是一种通过计算机软件模拟水利枢纽运行情况的方法。
•该实验通过对水利枢纽系统的相关参数进行输入,模拟计算水流、水位、流量等信息的变化,并可观察和分析不同操作策略对系统性能的影响。
2. 原理•水利枢纽模型是基于数学模型和流体力学原理构建的。
•模型中包括水流、水位、流量等变量,同时考虑与枢纽有关的运行条件和限制,如闸门开度、水闸开关、水库容量等。
•模型中还包含与枢纽控制相关的算法和决策逻辑,用于模拟不同的操作策略。
•仿真实验是通过对水利枢纽模型进行数值计算和模拟,得到枢纽系统在不同情况下的运行数据和状态。
3. 仿真实验过程•输入参数:首先需要输入水利枢纽的相关参数,如水库容量、流量输入、闸门开度等。
•模型计算:根据输入的参数和初始条件,使用数值计算方法对水利枢纽模型进行求解。
•结果分析:根据求解得到的模拟数据,可以对枢纽系统的运行情况进行分析,比如水位变化趋势、水流方向等。
•策略优化:通过对模拟数据进行观察和分析,可以评估不同操作策略的性能,进而优化枢纽的运行,提高水利枢纽的效益。
•模型验证:通过与实际枢纽运行数据进行对比,验证模型的准确性和可靠性,并进行适当的修正和优化。
4. 应用领域•水电站规划:通过对不同方案进行模拟实验,评估方案的可行性和经济性。
•防洪调度:模拟洪峰期间枢纽的运行策略,优化防洪效果。
•水资源调度:模拟不同供水方案,评估水资源调度效果。
•环境保护:模拟水流对生态环境的影响,优化枢纽的运行策略,减少对生态环境的不良影响。
5. 优势与挑战优势•安全性:模拟实验可以防止真实试验可能引起的风险和损失。
•可重复性:模拟实验可以多次进行,通过改变参数和策略来进行不同的运行情景模拟。
•经济性:相比实际试验,模拟实验成本较低,更加经济高效。
•探索性:模拟实验可以探索不同的操作策略,找到最优的运行方式。
挑战•模型精度:模型的准确性对实验结果有很大影响,需要不断验证和修正。
02水电站CAD-ansys实体建模
实体建模 - 由上而下建模
…工作平面
– Align WP with > 此命令用于定位工作平面.
Training Manual
INTRODUCTION TO ANSYS 5.7 - Part 1
• 例如, Align WP with Keypoints 命令 提示拾取三个关键点 - 一个为原点一 个定义X-轴, 一个定义 X-Y 平面.
L2 L1 Partition L3
L6
L4
L5
实体建模 - 由上而下建模
…布尔运算
• 演示:
Training Manual
INTRODUCTION TO ANSYS 5.7 - Part 1
– 通过在矩形中减去一个圆实现钻一个孔(或者在一个块体中减去柱体
实现)
– 画两个相交的实体,并存储db, 然后作交运算. 现在恢复db并对实体 进行相加. 注意比较两种运算的不同. (合运算类似交运算.) – 模型:
• 把工作平面移动到其缺省位置(总体 坐标系原点,X-Y 平面内)时, 点击 Align WP with > Global Cartesian.
实体建模 - 由上而下建模
…工作平面
•
Training Manual
INTRODUCTION TO ANSYS 5.7 - Part 1
演示:
– 清除数据库
• 被删除实体的编号数被“释放” (即, 这些编号可以可以指定给新的 实体,并从可以获得的最小编号开始)。
实体建模 - 由上而下建模
…
布尔运算
– 把两个或多个实体合并为一个.
Training Manual
INTRODUCTION TO ANSYS 5.7 - Part 1
电气工程中的电力系统仿真与建模
电气工程中的电力系统仿真与建模在当今高度依赖电力的社会中,电气工程领域的电力系统仿真与建模技术发挥着至关重要的作用。
电力系统作为一个复杂而庞大的体系,其运行的稳定性、可靠性和经济性直接关系到社会的正常运转和人们的生活质量。
为了更好地理解、设计和优化电力系统,仿真与建模成为了不可或缺的工具。
电力系统仿真,简单来说,就是在计算机上模拟电力系统的运行状态和行为。
通过建立数学模型和算法,输入各种参数和条件,如电源的出力、负荷的需求、线路的参数等,来预测系统在不同情况下的性能和响应。
这就好比在虚拟的世界中搭建一个电力系统,然后观察它如何工作,从而为实际的电力系统运行和规划提供参考。
电力系统建模则是仿真的基础。
建模过程需要对电力系统的各个组成部分,如发电机、变压器、输电线路、负荷等,进行精确的数学描述。
这些模型不仅要考虑电气特性,还要考虑机械、热力等方面的影响。
例如,发电机模型需要考虑其电磁暂态过程、机械转动惯量等因素;输电线路模型则要考虑电阻、电感、电容等参数的分布特性。
在建模过程中,准确性和简化性之间需要找到一个平衡。
过于复杂的模型可能导致计算量过大,难以在实际应用中快速得到结果;而过于简化的模型则可能无法准确反映系统的真实特性。
因此,建模者需要根据具体的研究目的和应用场景,选择合适的模型复杂度。
电力系统仿真与建模在电力系统的规划和设计中发挥着重要作用。
在规划新的电力网络时,可以通过仿真来评估不同的线路布局、变电站位置和容量选择等方案的效果。
例如,通过模拟不同负荷增长情况下的系统运行,确定最佳的电网扩展方案,以满足未来的电力需求,同时避免过度投资和资源浪费。
在电力系统的运行和控制方面,仿真与建模同样不可或缺。
实时的仿真可以帮助调度人员预测系统的动态变化,提前采取措施来应对可能出现的故障和异常情况。
例如,当电网中出现短路故障时,通过仿真可以快速评估故障对系统的影响,从而指导继电保护装置的动作,确保系统的安全稳定运行。
基于BIM技术的水利水电工程仿真设计研究
基于BIM技术的水利水电工程仿真设计研究摘要:水利水电工程可视化仿真是以动画方式将整个工程施工过程动态地、真实地演示出来,并能采集仿真过程中所形成的各种信息和数据,以图形方法直观呈现出来。
施工单位借此可正确理解工程的设计意图,实时了解各类施工数据和信息,对水利水电工程施工具有极大帮助。
随着我国水利水电工程的不断发展,可视化仿真技术在许多大规模建设项目和难度较高的项目中的应用越来越多。
文章首先对BIM技术的应用优势进行了分析总结,然后主要对BIM技术在水利水电工程可视化仿真中的应用进行了分析探讨,提高了工作效率和质量,提升了水利水电工程的经济效益。
关键词:BIM技术;可视化仿真;施工安全监控;1.BIM技术概述BIM技术指的是在数字3D模型基础上,整合并数字化处理施工项目中不同信息和数据的工作,通过该模型可以数字化形式将工程项目中的数据直观地呈现出来,同时也可将一些知识资源进行共享,为项目施工中决策提供可靠保证。
比如工程建设中的价格、设备、施工进度等数据信息模型,均能通过BIM技术以数字化方式呈现出来。
2.BIM技术的应用优势2.1 有效整合各项资源,实现协同创新传统二维平面设计虽然也可实现协同设计,但具有一定限制性,而且在二维平面进行设计时,智能化程度相对较低。
而应用BIM技术能实现以三维模型为基础的各专业协同设计,水利水电工程项目的各参与方可利用BIM技术实时上传设计计划和方案至数据库,并进行实时更新,以三维模型的方式将项目的最新设计成果经过重新整合之后,再展现在每位设计人员面前,真正实现无缝协同。
应用BIM技术可有效整合各项资源,大大提升设计质量和效率,并将设计误差尽可能降低最低。
另外,设计讲究时效性和经济性,设计人员应用BIM技术可准确生成该工程项目的简易模型,大大提升设计速度,还可借助该技术的设置工具来生成不同方案的三维展示、几何构型等,快捷、高效、准确地表达出设计人员的设计理念,进而有效争取到施工方案设计的主动权。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水电站本体仿真建模分析张绍勇1,周建旭2(1.河海大学电气工程学院,江苏 南京 210098;2.河海大学水电学院,江苏 南京 210098)摘要:水电站仿真机是利用计算机模拟技术模拟实际水电系统的运行环境,相应的内容包括水、机、电系统稳态仿真和动态全过程仿真。
包括水轮发电机组、调速器、励磁机以及输水系统在内的本体部分是水电站的核心,是水电站仿真的关键环节。
本文结合水电站的实际控制环节和事故现象,分析水电站本体仿真的基本模块,以及实现这些模块所需建立的仿真程序及相应的数学模型,为水电站本体仿真提供可靠的建模平台。
关键词:计算机应用;水电站本体,仿真建模;分析中图分类号:TP39119 文献标识码:B 文章编号:100720133(2006)0120067204 水电站仿真机是利用计算机模拟技术模拟实际水电系统的运行环境,帮助调度人员获得系统在正常状态、紧急状态下运行的操作经验,了解事故发生的全过程和事故发生的原因,减少调度员在事故处理时的心理压力,增强调度员事故处理时的自信心,提高调度员对水电系统进行正常控制的能力及突出事故的应变能力。
因此,为了实现操作人员的全过程培训以保证水电站安全稳定的运行控制,水电站仿真机的开发和应用也越来越重要,并且要求仿真机提供与实际发电厂尽可能一致的运行环境,展现各种正常、异常和事故的现场情况,保证仿真的真实性特别是动态仿真的实时性,有全面完整的仿真范围。
仿真机主要内容包括水、机、电系统稳态仿真和动态全过程仿真,而水轮机系统(包括:引水、水轮机、尾水)、发电机和励磁机系统(包括机械部分和电气部分)、调速系统(包括调速器和油压部分)等本体部分的仿真是其中的关键环节。
对于坝后式和引水式水电站而言,则引水系统、水轮机和尾水系统在内的水力系统部分的仿真显得尤为重要。
因此,在简要分析调速器、发电机和励磁机仿真建模的基础上,需进一步探讨水电站本体的仿真建模。
1 调速器仿真的数学模型和基本模块111 调速器仿真的数学模型调速器通常采用并联P I D型模型,考虑其中关键的非线性环节,其相应的状态方程[1,2]为d y1 d t=k pT y1φ-1+kpb pT y1y1+1T y1x1+1T y1x D+k pT y1c(1)dμdt=1T yy1-1T yμ(2)d xId t=-kIφ-kIb p y1+k1c(3)d xDd t-k DT ndφd t-K D b pT n T y1[-kpφ+x1+x D-(1+k p b p)y1+k p c]-1T nx D(4)式中:φ,y1,x I,x D,μ均为相对值,其中φ和μ分别为转速和开度的偏差相对值;Tn为微分环节时间常数;kP,k I,k D分别为比例常数、积分常数和微分常数;Ty,T y1为随动系统常数;b p为残留不平衡度;c为指令信号。
112 基本模块依据调速器在水力机组运行中的实际作用,在水电站仿真中,调速器需实现的主要模块包括:(1)开度调节模块。
在水力机组增荷、减荷或开停机等过程中,导叶的开度均依一定的规律发生变化(图1所示),该机组导叶启闭规律由优化计算确定,并通过调速器设定,进而控制导叶的启闭过程。
(2)P I D调节模块。
当调速器采用频率调节模式或小扰动等情况下,需要调速器进行P I D闭环调节,以使机组的转速维持在一定的范围内,从而保证机组运行的稳定性,或调节机组转速到某一给定转速。
其中调速器的调节参数可在一定的范围内整定,以提高机组的调节品质或实现一定的调节目标。
113 仿真程序的构成基于调速器描述方程式(1)~(4),编制相应的程序模块,则可实现调速器的各项调节功能,组成调速器仿真程序的主要处理程序有:・76・第20卷第1期 贵州水力发电G U I ZHOU WATER P OW ER 2006年2月收稿日期:2005207227作者简介:张绍勇(19722),男,四川省达州市人,工程师,硕士研究生,主要从事机械电子工程研究工作。
图1 水力机组导叶关闭规律示意图 (1)初始化程序。
用于实现调速器参数和与调速器有关的参量的初始化。
(2)P I D 调节程序。
用于实现调速器的P I D 闭环调节,包括非线性环节。
(3)开度调节程序。
用于给定导叶开度的开启规律和关闭规律,并且计算瞬时开度。
(4)数学处理程序。
主要包括线性插值程序和龙格—库塔法求解状态方程组的程序。
2 发电机和励磁机仿真的数学模型和基本模块211 发电机和励磁机的数学模型对于水轮发电机组,拟采用I EEE 推荐的五阶系统模型[2,3],则:标么值增量方程可表示为dE ′q d t =1T ′d 0[E fd -E ′q -(x d -x ′d )I d ](5)d E ′q d t =1T ″d 0-1T ′d 0E ′q -1T ″d 0E ″q -x d -x ′d T ′d 0+x ′d -x ″d T ″d 0I d +1T ′d 0-E fd (6)d E ″d d t =1T ″q 0-E ″d +(x q -x ″q )I q(7)dωd t =1M[P m -P e -Dω](8)dδd t=ωω0(9)电压方程为 V q =E ″q -x ″d I dV d =E ″d +x ″q I qV 2t =V 2q +V 2d 。
式中:T d0′,T d0″为d 轴暂态开路时间常数和次暂态开路时间常数;T q0″为q 轴次暂态开路时间常数;M 为机组惯性时间常数;ω,δ为转子角速度和转子角;D 为机组阻尼系数;E q ′,E q ″,E fd 为q 轴暂态电势、次暂态电势和励磁电势;E d ″为d 轴次暂态电势;x d ,x d ′,x d ″为d 轴电抗、暂态电抗和次暂态电抗;x q ,x q ″为q 轴电抗和次暂态电抗;I d ,I q 为d 轴和q 轴电流,可视具体情况由E q ″’,E d ″和δ线性表示;P m ,P e 为机械功率和电磁功率,可用转子角等线性表示。
励磁机相应的常微分方程[3]表示为d U a d t =-1T a U a -K a T a U f +K a T a (-V t +V s )(10)d U f d t =K f T e T f U a -1T f U f -K f (K e +S e )T e T fE fd (11)d E fd d t =1T e U a -K e +S eT eE fd(12)式中:U a ,U f 为电压调节器输出电压和励磁反馈电压;K a ,T a 为分别为电压调节器的放大倍数和时间常数;S e ,K e ,T e 为为励磁机饱和系数、自励系数和时间常数;K f ,T f 为分别为转子电压软反馈的放大倍数和时间常数;V t ,V s 为分别为机端电压和励磁附加控制信号。
212 仿真程序的基本模块在水电站仿真中,发电机和励磁机的主要模块包括:(1)机组的顺序控制模块。
在机组的顺控过程中,包括开机、停机和零升等,均要求励磁机的电压按照要求升高或降低,在本控制模块,励磁机接受指令后,完成规定的电压操作。
(2)无功调节模块。
在部分水电站运行中,无功调节是一个比较重要的环节。
若考虑采用扩大单元接线模式,在无功调节过程中,会出现多台机组的无功再分配的情况。
(3)事故或故障模块。
实现再发生故障或事故情况下的电压调节。
213 仿真程序的构成基于发电机和励磁机描述方程式(5)~(12),编制相应的程序模块,则可实现发电机和励磁机的各项调节功能,组成发电机和励磁机仿真程序的主要处理程序有:(1)初始化程序。
用于实现发电机和励磁机参数和相关参量的初始化。
(2)模块处理程序。
该程序是发电机和励磁机仿真程序的核心,其中包括了上述所有模块,并且解决了各模块之间的连贯性以及程序的通用性。
(3)其他数学处理程序。
主要包括龙格—库塔法求解状态方程组的程序。
3 水电站本体仿真的数学模型和基本模块 基于已经建立的调速器、发电机和励磁机的仿真模块,则可进一步深入探讨包括水轮机系统(引・86・第20卷第1期 贵州水力发电 2006年2月水、水轮机、尾水)、发电机和励磁机系统(机械部分和电气部分)、调速系统(调速器和油压部分)等本体部分的整体仿真建模。
311 水力系统部分的数学模型和仿真程序流程31111 有压输水系统内水体的数学模型依据水电站水锤计算的基本方程可建立特征线方程[4]C+∶H pi=C p-B p Q pi(13)C-∶H pi=C M+B M Q pi(14)式中:CP,B P,C M,B M为时刻t-Δt的已知量, H pi、Q pi为时刻t的未知量。
C p=H i-1+BQ i-1 B p=B+R|Q i-1|C M=H i+1-BQ i+1 B M=B+R|Q i-1|式中:B=agA ,R =fΔx2gDA2为常数;Hi-1,Q i-1,H i,Q i为时刻t-Δt的已知量;i-1,i,i+1为计算断面位置;a,D,A,f分别为水锤波速、管道直径、管道面积和摩阻系数;Δx为管道分段长度,满足库朗条件Δt=Δx/a。
在机组模型特性曲线中,给出了大开度区的机组特性,包括流量特性、效率特性和飞逸特性,但是,在过渡过程中水轮机将通过非常宽阔的工况区域,这些区域超出了模型特性曲线给出的范围,因此要结合飞逸特性曲线适当的补充特性曲线,尤其是小开度区的特性曲线。
31112 水力系统部分的仿真程序流程水力系统部分的仿真程序流程见图2。
图2 水力系统部分的仿真程序基本流程312 仿真程序的基本模块依据水电站的实际运行情况和可能出现的运行工况,将仿真程序的基本模块分述如后。
31211 初始工况设置模块为使培训工作按机组的不同起始条件开始运行,学员应能方便、迅速地选择、设置初始工况点。
为此,仿真系统应对3台机组提供如下初始工况:备用机组的启动;机组带满负荷运行;机组带部分负荷运行;机组空载运行(发电机无励磁);机组空载运行(发电机有励磁);机组调相压水运行;机组调相不压水运行;快速闸门关闭时机组启动;快速闸门全开时机组启动,等等。
31212 机组的顺序控制模块在机组的顺控过程中,均会对本体部分发出相应的指令,本程序块实现:接受从顺控模块传递的指令,辨实指令的具体要求,主要是对导叶开度的控制目标,并立即作出准确的反应,该模块主要包括:(1)机组开机流程。
机组导叶开度从零开度至空载开度,转速从零转速在水流的冲击下上升到90%的转速,然后通过P I D调速器的闭环调节达到额定转速,若机组马上并网,则可迅速带上所需的负荷。
(2)机组停机流程。
机组导叶开度从大开度至空载开度,这期间机组仍处于并网状态,机组转速维持额定转速,当开度达到空载开度后,机组脱网,开度继续较小至零,转速有一上升过程,达到最大转速后,进入水轮机制动区,转速下降,当转速降至15%额定转速后,投入机械制动,直至转速降至零为止。