1_寻址方式与基本指令实验
指令和数据的寻址方式

4.5.2 基本指令系统
指令系统的基本指令见表4.7。
4.5.3 精简指令系统
RISC指令系统的特征:
选取使用频率最高的一些简单指令;(指令总数较少) 指令长度固定,指令格式种类少,寻址方式种类少; 只有取数/存数指令访问存储器,其余的指令操作都在寄存器之间进行。
因此,RISC的CPU的寄存器较多。
1. 顺序寻址方式
指令地址在内存中按顺序安排,当执行一段程序时,通常是一条指令接一 条指令的顺序执行。 为此,必须使用程序计数器(又称指令指针寄存器)PC来计数指令的顺序 号,该顺序号就是指令在内存中的地址。
2. 跳跃寻址方式
当程序转移执行的顺序时,指令的寻址就采取跳跃寻址方式。所谓跳跃,是 指下条指令的地址码不是由程序计数器给出,而是由本条指令给出。程序跳 跃后,按新的指令地址开始顺序执行。
4.3 指令和数据的寻址方式
操作数或指令在存储器中的地址:某个操作数或某条指令存放在某个存储单 元时其存储单元的编号。 在存储器中,操作数或指令写入或读出的方式,有三种:地址指定方式、相 联存储方式和 堆栈存储方式。 当采用地址指定方式时,形成操作数或指令地址的方式,称为寻址方式。寻 址方式分为两类,即指令寻址方式和数据寻址方式。 指令的寻址方式有两种,一种是顺序寻址方式,另一种是跳跃寻址方式。 4.3.1 指令的寻址方式
4.3.2 操作数寻址方式
1.
1.
1.
寄存器寻址方式和寄存器间接寻址方式:当操作数不放在内存中,而是 放在CPU的通用寄存器中时,可采用寄存器寻址方式。此时指令中给出的 操作数地址不是内存的地址单元号,而是通用寄存器的编号。 寄存器寻址方式和寄存器间接寻址方式的区别在于:指令中的寄存器内 容不是操作数,而是操作数的地址,该地址指明的操作数在内存中。 相对寻址:是把程序计数器PC的内容加上指令格式中的形式地址D而形成 操作数的有效地址。 程序计数器的内容就是当前指令的地址。“相对”寻址,就是相对于当 前的指令地址而言。 采用相对寻址方式的好处是程序员无须用指令的绝对地址编程,所编程 序可以放在内存任何地方。 此时形式地址D通常称为偏移量,其值可正 可负,相对于当前指令地址进行浮动。 基址寻址方式:将CPU中基址寄存器的内容加上指令格式中的形式地址而 形成操作数的有效地址。 它的优点是可以扩大寻址能力。同形式地址相比,基址寄存器的位数可 以设置得很长,从而可以在较大的存储空间中寻址。
内存实验报告
一、实验目的1. 了解内存的基本概念和组成结构。
2. 掌握内存的读写操作过程。
3. 熟悉内存寻址方式及其应用。
4. 分析内存性能对系统运行的影响。
二、实验原理1. 内存基本概念:内存是计算机中用于存储数据和指令的设备,它是计算机系统中的核心组成部分。
内存按照存储单元的存储容量和速度分为多种类型,如RAM、ROM、ROM、Cache等。
2. 内存组成结构:内存主要由存储单元、地址译码器、数据总线、控制电路等组成。
存储单元是内存的基本存储单元,每个存储单元都有一个唯一的地址,通过地址译码器将地址转换为存储单元的物理位置。
数据总线用于传输数据,控制电路负责协调读写操作。
3. 内存读写操作过程:内存的读写操作主要包括以下步骤:(1)将需要访问的存储单元地址送入地址寄存器;(2)根据地址寄存器中的地址,通过地址译码器找到对应的存储单元;(3)控制电路根据读写信号,将数据从存储单元读入数据寄存器或从数据寄存器写入存储单元。
4. 内存寻址方式:内存寻址方式主要有以下几种:(1)直接寻址:直接将操作数地址送入指令地址寄存器;(2)间接寻址:将操作数地址存储在内存单元中,通过指令访问该内存单元获取操作数地址;(3)基址寻址:以基址寄存器中的值作为操作数地址的基准;(4)变址寻址:以变址寄存器中的值加上指令中的偏移量作为操作数地址。
三、实验内容1. 内存读写操作实验:通过编程实现内存的读写操作,包括读取内存单元数据、写入内存单元数据等。
2. 内存寻址方式实验:分别使用直接寻址、间接寻址、基址寻址、变址寻址等寻址方式实现数据访问。
3. 内存性能分析实验:分析不同内存类型、容量、速度对系统运行的影响。
四、实验步骤1. 内存读写操作实验:(1)编写程序,实现将数据从内存单元读取到寄存器;(2)编写程序,实现将数据从寄存器写入内存单元。
2. 内存寻址方式实验:(1)使用直接寻址方式,实现数据访问;(2)使用间接寻址方式,实现数据访问;(3)使用基址寻址方式,实现数据访问;(4)使用变址寻址方式,实现数据访问。
微机原理实验报告册(3篇)
第1篇一、实验目的1. 理解和掌握微机的基本组成和工作原理;2. 熟悉微机硬件设备和实验仪器的使用方法;3. 提高动手实践能力,培养解决实际问题的能力;4. 深入理解微机原理课程内容,为后续课程学习奠定基础。
二、实验内容1. 微机系统认识实验2. 微机硬件组成实验3. 微机指令系统实验4. 微机寻址方式实验5. 微机程序设计实验6. 微机接口技术实验三、实验仪器与设备1. 微机原理实验箱2. 示波器3. 数字万用表4. 计算机一台5. 实验指导书四、实验步骤与内容1. 微机系统认识实验(1)观察实验箱的结构,了解各个模块的功能;(2)熟悉实验箱的电源、复位、运行等按钮的使用方法;(3)学习微机系统的工作流程,包括加电、复位、启动等过程;(4)观察微机系统启动后的运行状态,了解各个模块的协同工作。
2. 微机硬件组成实验(1)观察实验箱的CPU、内存、I/O接口等硬件模块;(2)学习CPU的内部结构,包括寄存器、控制单元、运算单元等;(3)学习内存的存储原理,了解ROM、RAM等存储器的特点;(4)学习I/O接口的工作原理,了解中断、DMA等传输方式。
3. 微机指令系统实验(1)学习微机指令系统的基本格式,包括操作码、地址码等;(2)掌握微机指令系统的寻址方式,包括立即寻址、直接寻址、间接寻址等;(3)编写简单的汇编语言程序,实现加、减、乘、除等运算;(4)学习微机中断处理过程,了解中断向量表、中断服务程序等概念。
4. 微机寻址方式实验(1)学习微机寻址方式的基本概念,包括直接寻址、间接寻址、寄存器寻址等;(2)编写程序,实现不同寻址方式下的数据访问;(3)观察不同寻址方式对程序执行速度的影响。
5. 微机程序设计实验(1)学习汇编语言程序设计的基本方法,包括数据定义、指令编写、程序结构等;(2)编写简单的程序,实现数据交换、排序等操作;(3)学习微机程序的调试方法,包括单步执行、断点设置等。
6. 微机接口技术实验(1)学习微机接口技术的基本概念,包括并行接口、串行接口等;(2)观察实验箱中的并行接口、串行接口等模块,了解其工作原理;(3)编写程序,实现数据在并行接口、串行接口之间的传输;(4)学习微机中断处理在接口技术中的应用。
第4章_计算机指令构成和寻址方式

Pentium指令系统所支持的数据类型:
1. 整数:补码表示的二进制数,字节(8位)、字(16位)和双字(32 位)3种。
2. 序数:无符号二进制数,字节(8位)、字(16位)和双字(32位)3 种。
3. UBCD数:未压缩的(unpacked)BCD数,数字值0到9,每个数字 占一个字节。 4. BCD数:压缩的BCD数,一个字节可以表示2位数字,从00到99。 5. 指针:32位有效地址,指出段内的地址偏移量。
二地址指令
一地址指令 零地址指令
add r1,r2
add r1 add
r1←r1+r2
A←A+r1 T←T+(T-1)
寻址方式:
寻址方式指的是如何描述一个操作数或下一条指令的地址, 即确定操作数或下一条指令地址的方法。常用的寻址方式有 立即数寻址、寄存器寻址、直接寻址、间接寻址、相对寻址 等。
指令长度: 指令长度有固定长度和可变长度两种。RISC处理机一般采用 固定长度的指令格式,例如SUN SPARC的指令长度均为32位, 与数据字长相同。定长指令格式的好处在于指令译码和流水 线执行比较容易。Pentium处理机的指令长度是可变的,常用 指令用较少的二进制位表示,不常用的指令使用较多的位表 示,它的好处是可以缩短指令的平均长度。 指令系统设计中的问题: 指令种类和寻址方式越多越好,还是越少越好?指令种类越 多、寻址方式越复杂,说明处理机的功能越强。但同时,实 现一条复杂指令需要较多的逻辑门电路,执行一条复杂指令 所化费的时间也比较长,而且处理机的设计复杂度提高、设 计周期增长,并且复杂指令的使用频率较低。指令种类少、 寻址方式简单的好处是可以提高时钟频率,缩短指令周期, 从而很快完成一条指令的执行。但并不是越简单越好,指令 太简单,完成一次比较复杂的操作往往需要一长串的简单指 令序列,也会使执行时间变长,同时也使程序变长。
第三章 MCS-51单片机的寻址方式和指令系统

由此可把数据传送指令分成三部分
(一)内部数据传送(通用传送指令)
1.以A为目的操作数
MOV A,Rn MOV A,@Ri ;A← (Rn) ;A←((Ri))
双字节
11101rrr 1110011i
MOV A,direct ;A←(direct) 11100101 direct
MOV A,#data ;A←#data 例: MOV A,@R1 若(R1)=20H,(20H)=62H 结果:(A)=62H 11100100 data
指令MOVC A,@A+DPTR;执 行示意图
结果:(ACC)=64H
六、相对寻址
以当前PC的内容为基准,加上指令给出的 偏移量(rel)形成新的PC值(转移地址) 的寻址方式。
转移地址=目的地址 =当前(PC)+rel
目的地址=PC当前值十rel 目的地址=转移指令的PC值+2(或3)十rel 目的地址=转移指令地址+转移指令字节数+rel
单周期:64 双周期:45 四周期:2
若fosc=12MHz, 大多指令执行 仅1μs
按照指令的功能分5大类
一、数据传送类指令(29条) 二、算术运算类指令(24条) 三、逻辑操作类指令(24条) 四、控制转移类指令(17条) 五、位操作类指令 (17条)
在描述指令系统的功能时,常用符号介绍:
@——间址符号,如@Ri,@DPTR 13. / ——位操作数的前缀,表示对该位操作 数取反,如/bit。 14. (×)——由×寻址的单元中的内容。 15. ((X))——由X的内容作为地址的存 储单元的内容。 16. ← ——箭头右边的内容取代箭头左边的 内容。
12.
一、数据传送类指令(29条)
单片机实验报告1
输入程序并保存,运行程序并填写下表。
程序
执行结果
源操作数寻址方式
MOV #30H
MOV A ,
R0, R0=30H @R0
立即寻址
MOV A , R0
MOV 31H, 30H
MOV #30H
32H,
INC @R0
MOV 31H, @R0
MOV #0010H
DPTR,
MOVX
A,
@DPTR
MOVC
A,
《 单片机原理及接口技术》
实验报告
专业
班级
姓名
学号
同组人
实验时间
年
月
日节
实验名称
基本指令实验
一、实验目的:
指导教师 实验地点
二、实验设备: 三、实验内容
四、实验预习
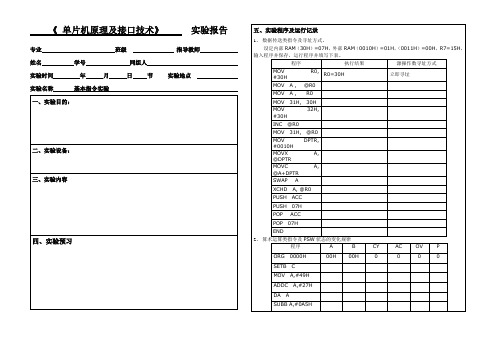
五、实验程序及运行记录
1、 数据传送类指令及寻址方式。
设定内部 RAM(30H)=07H,外部 RAM(0010H)=01H,(0011H)=00H,R7=15H,
六、成绩评定
@A+DPTR
SWAP A
XCHD A, @R0
PUSH ACC
PUSH 07H
POP ACC
POP 07H
END
2、 算术运算类指令及 PSW 状态的变化规律
程序
A
B
CY
AC
OV
P
ORG 0000H
00H 00H
0
0
0
0
SETB C
MOV A,#49H
ADDC A,#27H
DA A
SUBB A,#0A5H
ADD A,#2DH INC A ADDC A,#95H DIV AB MOV B,#08H MUL END 3、 拆字程序,设(20H)=35H,要求拆为 03H、05H 存放在外部 RAM0020H、0021H 单 元中。 写出该程序的机器代码。
[物理]单片机3第三章寻址方式
北京化工大学 信息科学与技术学院 郭 青
1
第三章
本章重点
寻址方式
80C51指令系统
指令格式
操作结果及对标志位影响
3.1
111条指令
概述
29 24 24 17
数据传送类指令 数学运算类指令
分类
逻辑运算类指令 控制转移类指令
位操作指令
17
单字节指令 按指令长度分类
双字节指令
三字节指令 12个振荡周期 64
COUNT:PUSH DPH; 保护DPTR内容
PUSH DPL;
MOV DPTR,#TABLE ;赋表首地址给DPTR
MOVC A, @A+DPTR
; POP DPL; 根据A中内容查表 恢复DPTR内容 返回主程序
POP DPH
RET;
ORG 1000H TABLE:DB 00 DB 01 DB 04 DB 09 DB 16 DB 25 DB 36 DB 49 DB 64 DB 81
19
3.3.1 数据传送类指令
按操作方式,分为三种: 数据传送 数据交换 栈操作
一、普通传送类指令 格式: MOV (目的操作数),(源操作数) 操作码助记符 操作: 将源操作数单元内容,传送到目的操作数 单元中,源操作数内容不变。不影响标志 位Cy,AC和OV。
操作数的组合关系
1、立即数的传送 MOV A, #data MOV Rn, #data (A) (Rn) #data #data
d:MOV direct,#data
将8位立即数送入由direct直接寻址的地 址单元中。 direct:00H~FFH,8位二进制地址码
寻址内部RAM(00H~7FH)及SFR
第二章 80868088寻址方式和指令系统
(5)奇偶标志PF
用于反映运算结果中“1”的个数。如果“1”的个数为偶数,则OF被置1,否则OF被清0。
(6)辅助进位标志AF
在字节操作时,如发生低半字节向高半字节进位或借位;在字操作时,如发生低字节向高字 节进位或借位,则辅助进位标志AF被置1,否则AF被清0。
②状态控制标志
(1)方向标志DF
方向标志决定着串操作指令执行时,有关指针寄存器调整方向。 当DF为1时,串操作指令按减方式改变有关的存储器指针值, 当DF为0时,串操作指令按加方式 改变有关的存储器指针值。
其中:存储单元的物理地址是12345H, 标出的:两个重叠段的段值分别是:1002H和1233H, 在对应段内的偏移分别是2325H和0015H。
采用段值和偏移构成逻辑地址后,段值由段寄存器给出,偏移可由指令指针IP、堆栈指针SP 和其他可作为存储器指针使用的寄存器(SI、DI、BX和BP)给出,偏移还可直接用16位数给 出。
图中指令存放在代码段中,OP表示该指令的操作码部分 再例如: MOV AL,5 则指令执行后,(AL)=05H
MOV BX,3064H 则指令执行后, (BX)=3064H
2、寄存器寻址方式
操作数在CPU内部的寄存器中,指令指定寄存器号。
对于16位操作数数,寄存器可以是:
AX、BX、CX、DX、SI、DI、SP和BP等;
指令中不使用物理地址,而是使用逻辑地址,由总线接口单元BIU按需要根据段值和偏移自动 形成20位物理址。
3、段寄存器的引用
由于8086/8088CPU有四个段寄存器,可保存四个段值。所以可同时使用四个段值,但这四个 段有所分工。
在取指令的时候,自动引用代码段寄存器CS,再加上由IP所给出的16位偏移,得到要取指令 的物理地址。
单片机实验报告参考
《实验一 应用系统开发过程演示》实验报告参考一.实验目的1.了解单片机应用系统的开发过程,获得感性认识。
2.了解开发箱/开发板的使用方法3.了解仿真软件的基本功能和使用方法。
二.实验环境(一) EL 型微机教学实验系统:1. 设备::北京精议达盛科技有限公司EL-MUT3多CPU 单片机/微机实验实训系统2. 软件:北京精议达盛科技有限公司8051调试软件4.0版 二.实验电路(一) EL 型微机教学实验系统实验电路(二) 仿真软件开发调试环境: 1.英国 Labcenter electronics 公司的Proteus EDA 工具软件, 2. 美国Keil 公司的µVision 集成开发环境 (二) 仿真软件实验电路:三. 操作步骤:(一)EL 型微机教学实验系统操作步骤1. 连线:P1.0~P1.7接LED1~LED82. 新建汇编语言源文件3. 另存为D:\J08X\SY1.ASM4. F3编译生成目标文件,F5进入调试:工具栏上“R ”打开寄存器窗,“H ”打开反汇编窗口F8,单步执行,观察相关寄存器窗口中有关寄存器中数据的变化。
四. 源程序(括号中为EL 型微机教学实验系统中的程序)ORG 0000H (ORG 4000H ) SJMP MAIN (LJMP MAIN) ORG 0040 H (ORG 4100H) MAIN: MOV A,#0FEH LOOP: MOV P2,A (MOV P1,A ) LCALL D_1s RL A AJMP LOOP ;以下为延时子程序 D_Is: MOV R6,#100 ;1s D10ms: MOV R5,#40 :10ms DL: MOV R4,#123 N0P DJNZ R4,$ DJNZ R5,DL DJNZ R6,D10ms RET END(二) 仿真软件开发调试环境: ◆Proteus 工具软件下, 1.新建设计 ①选取元件 A T89C51,RES,LED-RED ②在工作区放置元件,地线,电源 电阻RES 阻值200Ω,模式DIGITAL ③连线 2. 源程序设计,生成目标文件代码 “Source →Add/RemoveFiles ”新建源程序文件D:\J08X\L Y1.ASM “Source → SY1.ASM ”在文本编辑器编写源程序 通过“Source →BuildAll ”编译源程序,生成目标程序。
指令格式及寻址方式
特点:指令中直接给出操作数在段内的偏移量,段基 址隐含给出或用段前缀指明。该寻址方式适用于处理单个变
一般操作数存放在数据段,故操作数的物理地址为 物理地址=(DS)× 16D+ EA
=(段基址的寄存器)× 16 + 偏移地址
1.3与数据有关的寻址方式
【例3.4】已知(DS)=4000H,[42000H]=3355H MOV AX,[2000H]
1.3与数据有关的寻址方式
(3)寄存器相对寻址方式(register relative addressing 特点:操作数的有效地址是一个基址寄存器或变址寄存器的 内容和指令中指定的8位或16位位移量(即偏移量)之和。 适用于表格处理,修改基址或变址寄存器的内容来取得表格
{ 物理地址=16D×(DS){}+
ADD AX, BX
1.18086/8088的通用指令格式
对有操作数的指令,在执行指令所规定的操作之前首 先要寻找操作数。指令中的操作数字段实质上是指出参加 操作运算的操作数存放在何处。一般来说,操作数存放在 指令代码中,称为立即数;操作数存放在CPU寄存器中, 称为寄存器操作数;操作数存放在内存单元中,称为存储 器操作数; 操作数也可存放在I/O端口内。寻找这些操作 数的方式称为寻址方式,即指令中用于说明操作数或操作 数所在地址的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1 寻址方式与基本指令实验
2.1.1 实验目的
1、熟悉80x86寻址方式及基本指令的功能,进一步理解和巩固课堂学习内容。
2、掌握汇编语言程序设计上机过程, 掌握汇编语言源程序结构,为后续汇编语言程序设计打好基础。
3、熟悉Microsoft的DEBUG或Borland的Turbo DEBUG调试工具的使用方法
2.1.2 实验预习要求
1、认真阅读本书第一部分第1章,熟悉汇编语言程序设计上机步骤。
2、认真阅读本书第三部分,熟悉DEBUG调试工具的使用方法。
3、复习80x86操作数寻址方式及基本指令(数据传送、算术运算和逻辑运算等)。
4、了解实验内容,并在实验前根据课堂所学知识回答有关问题(个别取决于程序实际运行环境的问题除外),以便在实验时进行验证。
2.1.3 实验内容
1、读懂下列源程序,使用EDIT生成名为EX11.ASM的源程序,汇编生成EX11.OBJ文件和EX11.LST
文件,连接生成EX11.EXE文件;用EDIT打开EX11.LST文件,了解.LST文件包含的信息;使用DEBUG调试工具单步执行EX11.EXE程序,注意观察IP值的变化,并回答下列问题。
(1)程序装入后,代码段寄存器CS的内容为________H,代码段第一条可执行指令MOV AX, DA TA对应的机器代码为__________H,它是一个________字节指令,注意观察执行该指令时IP值的变化情况,该指令源操作数DA TA的寻址方式是__________,其值为__________。
(2)执行完MOV DS, DATA指令后,数据段寄存器DS的内容为________H,源程序在数据段中定义的数据82H、68H和88H被装入的存储单元的物理地址分别为________H、________H和________H。
(3)程序中第一条ADD AL, [BX] 指令对应的机器代码为__________H,它是一个________字节指令,注意观察执行该指令时IP值的变化情况;该指令中源操作数的寻址方式为__________,该操作数所在存储单元的逻辑地址(DS): (BX)为__________,其物理地址为__________H;执行完该指令后(AL)=______H,CF=______,OF______,ZF______,SF______,AF______,PF______;若两操作数为无符号数,计算结果是否正确_______?若两操作数为带符号数,计算结果是否正确________?若计算结果正确,结果是正数还是负数______?
(4)执行完第二条ADD AL, [BX] 指令后(AL)=______H,CF=______,OF______,ZF______,SF______,AF______,PF______;若两操作数为无符号数,计算结果是否正确_______?若两操作数为带符号数,计算结果是否正确________?
(5)指令MOV SUM, AL中目的操作数的寻址方式为__________。
该指令执行完后,注意观察(DS):0003H单元中值的变化,该单元的值变为________H。
DA TA SEGMENT
NUM DB 82H, 68H, 88H
SUM DB ?
DA TA ENDS
CODE SEGMENT
ASSUME CS:CODE, DS:DATA
START: MOV AX, DA TA
MOV DS, AX
MOV BX, OFFSET NUM
MOV AL, [BX]
INC BX
ADD AL, [BX]
INC BX
ADD AL, [BX]
MOV SUM, AL
MOV AH, 4CH
INT 21H
CODE ENDS
END START
2、读懂下列源程序;编辑、汇编、连接生成EX12.ASM、EX12.OBJ、EX12.LST、EX12.EXE文件;使
用DEBUG单步执行EX12.EXE文件,并回答以下问题。
(1)代码段的前三条指令MOV AX, STACK、MOV SS, AX和MOV SP, LENGTH STL的功能为堆栈初始化,试问执行完这三条指令后,堆栈栈底所在单元的逻辑地址(SS): (SP)为________;
执行PUSH AX指令后堆栈指针寄存器(SP)=______H,此时,(SS): (SP+1)和(SS): (SP)单元的值为_______H;执行完PUSH BX后(SP)=______H,此时,(SS): (SP+1)和(SS): (SP)单元的值为_______H;执行完POP AX后(SP)=______H;执行完POP BX后(SP)=______H;此时(AX)=______H,(BX)=______H。
请读者通过对堆栈操作指令执行情况的观察,进一步掌握进、出栈操作过程。
(2)执行ADD AX, BX指令后(AX)=________H,CF=______,OF______,ZF______,SF______,AF______,PF______(注意考虑PF值与计算结果高8位有无关系);若两操作数为无符号数,计算结果是否正确_______?若两操作数为带符号数,计算结果是否正确________?
(3)执行AND AX, BX指令后(AX)=________H,CF=______,OF______,ZF______,SF______,AF______,PF______。
STACK SEGMENT stack
STL DW 100H DUP(?)
STACK ENDS
CODE SEGMENT
ASSUME CS:CODE,SS:STACK
START: MOV AX, STACK
MOV SS, AX
MOV SP, LENGTH STL
;表达式“LENGTH STL”的功能为计算STL中定义的变量的个数,
;汇编后其值为100H ,详见教材5.2.2
MOV AX, 0101101100001010B
MOV BX, 0100110010100011B
PUSH AX
PUSH BX
ADD AX, BX
POP AX
POP BX
AND AX, BX
MOV AH,4CH
INT 21H
CODE ENDS
END START
3、指出下列指令的错误原因,上机运行,观察汇编程序(MASM.EXE)给出的出错信息,改正后再上机
验证。
(1) MOV BP, BL (2) MOV [BX],[BP]
(3) MOV [BX],20H (4) INC [SI]
(5) ADD AX,[SI+DI] (6) SHL AX,3
(7) PUSH 2000H (8) POP AL
(9) MOV CS,AX (10) MOV DS,1000H
有关常见汇编错误的详细内容见本书第三部分第3章“汇编语言程序常见汇编错误分析”。
2.1.4 实验报告要求
1、写出任务1和任务2中所有问题的正确答案;对实验前做错或做不出来的问题,说明通过上机操作
对这些问题有哪些新的认识。
2、写出任务3中10条错误指令的错误原因,对可以改正的指令给出其正确形式,并分别记录汇编程序
对每条错误指令给出的出错信息。
3、简要说明汇编语言程序设计的步骤,每一步使用什么工具软件,生成什么类型的文件。
4、写出实验小结,内容包括实验心得(收获)、实验中遇到的问题及解决办法、不足之处或今后应注意
的问题等。