电路零极点的影响
rc电路零点和极点
rc电路零点和极点RC电路是由电阻(R)和电容(C)组成的电路。
在RC电路中,零点和极点是两个重要的概念。
本文将着重介绍RC电路的零点和极点,探讨它们的含义和作用。
我们来了解一下RC电路的基本原理。
RC电路是一种能够存储和释放电能的电路。
当电压施加在电容上时,电容器会充电或放电,从而改变电路中的电流和电压。
而电阻则起到限制电流的作用,控制电路的稳定性。
在RC电路中,零点是指电路的传输函数(Transfer Function)的根之一。
传输函数描述了输入信号与输出信号之间的关系。
零点是使得传输函数等于零的特定频率或复数。
在RC电路中,零点通常是由电容器的充电和放电导致的。
当电容器充电时,电流通过电阻,导致传输函数等于零。
因此,零点可以用来分析电路的频率响应和稳定性。
极点是另一个重要的概念,它也是传输函数的根之一。
极点是使得传输函数无穷大的特定频率或复数。
在RC电路中,极点主要由电容器和电阻的相互作用引起。
当电容器放电时,电流通过电阻,导致传输函数无穷大。
因此,极点可以用来分析电路的频率响应和稳定性。
零点和极点对RC电路的性能和特性有着重要影响。
首先,它们可以帮助我们理解电路的频率响应。
通过分析传输函数的零点和极点,我们可以确定电路对不同频率的输入信号的响应情况。
例如,当传输函数的零点在某个频率附近时,电路对该频率的信号的响应将较强。
相反,当传输函数的极点在某个频率附近时,电路对该频率的信号的响应将较弱。
零点和极点还可以用来评估电路的稳定性。
在RC电路中,传输函数的极点决定了电路的稳定性。
当极点位于虚轴的左侧时,电路是稳定的。
反之,当极点位于虚轴的右侧时,电路是不稳定的。
因此,通过分析传输函数的极点,我们可以确定电路的稳定性,并采取相应的措施来保证电路的正常运行。
除了对RC电路的性能和稳定性有影响外,零点和极点还可以用来设计和优化电路。
通过调整电容器和电阻的数值,我们可以改变传输函数的零点和极点的位置,从而优化电路的性能。
零极点对系统的影响
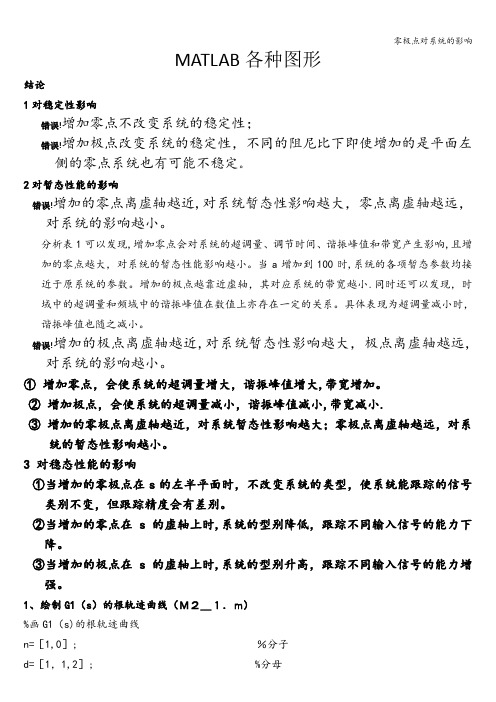
MATLAB各种图形结论1对稳定性影响错误!增加零点不改变系统的稳定性;错误!增加极点改变系统的稳定性,不同的阻尼比下即使增加的是平面左侧的零点系统也有可能不稳定。
2对暂态性能的影响错误!增加的零点离虚轴越近,对系统暂态性影响越大,零点离虚轴越远,对系统的影响越小。
分析表1可以发现,增加零点会对系统的超调量、调节时间、谐振峰值和带宽产生影响,且增加的零点越大,对系统的暂态性能影响越小。
当a增加到100时,系统的各项暂态参数均接近于原系统的参数。
增加的极点越靠近虚轴,其对应系统的带宽越小.同时还可以发现,时域中的超调量和频域中的谐振峰值在数值上亦存在一定的关系。
具体表现为超调量减小时,谐振峰值也随之减小。
错误!增加的极点离虚轴越近,对系统暂态性影响越大,极点离虚轴越远,对系统的影响越小。
①增加零点,会使系统的超调量增大,谐振峰值增大,带宽增加。
②增加极点,会使系统的超调量减小,谐振峰值减小,带宽减小.③增加的零极点离虚轴越近,对系统暂态性影响越大;零极点离虚轴越远,对系统的暂态性影响越小。
3 对稳态性能的影响①当增加的零极点在s的左半平面时,不改变系统的类型,使系统能跟踪的信号类别不变,但跟踪精度会有差别。
②当增加的零点在s的虚轴上时,系统的型别降低,跟踪不同输入信号的能力下降。
③当增加的极点在s的虚轴上时,系统的型别升高,跟踪不同输入信号的能力增强。
1、绘制G1(s)的根轨迹曲线(M2_1.m)%画G1(s)的根轨迹曲线n=[1,0]; %分子d=[1,1,2]; %分母figure1 = figure(’Color’,[1 1 1]);%将图形背景改为白色rlocus(n,d); %画G1(s)根轨迹曲线title('G1(s)的根轨迹’); %标题说明2、绘制G1(s)的奈奎斯特曲线(M2_2.m)%画G1(s)的奈奎斯特曲线figure1 = figure(’Color',[1 1 1]); %将图形背景改为白色for a=1:10 %a取1,2,3……10,时,画出对应的奈奎斯特曲线G=tf([1/a,1],[1,1,1]);nyquist(G);hold onendtitle('G1(s)的奈奎斯特曲线’);%标题说明3、绘制G2(s)的根轨迹曲线(M2_3.m)%画G2(s)的根轨迹曲线n=[1,1,1,0] ; %分子d=[1,1,2] ; %分母figure1 = figure('Color',[1 1 1]);%将图形背景改为白色g2=tf(n,d) %求G2(s)的传递函数rlocus(g2); %画G2(s)根轨迹曲线title(’G2(s)的根轨迹'); %标题说明4、绘制ξ=0.1,0.3,1,1。
关于零点和极点的讨论

【转】关于零点和极点的讨论2011-08-13 19:46转载自wycswycs最终编辑hyleon023一、传递函数中的零点和极点的物理意义:零点:当系统输入幅度不为零且输入频率使系统输出为零时,此输入频率值即为零点。
极点:当系统输入幅度不为零且输入频率使系统输出为无穷大(系统稳定破坏,发生振荡)时,此频率值即为极点。
举例:有时你家音响或电视机壳发出一阵阵尖厉嘶嘶声,此时聪明的你定会知道机壳螺丝松了,拧紧螺丝噪声问题就解决了。
其实,你所做的就是极点补偿,拧紧螺丝——你大大降低了系统极点频率。
当然此处系统是指机械振动系统不是电路系统,但原理一样。
抛砖引玉尔,希望更多答案。
(这一段有待讨论)二、每一个极点之处,增益衰减-3db, 并移相-45度。
极点之后每十倍频,增益下降20db.零点与极点相反;每一个零点之处,增益增加3db,并移相45度。
零点之后,每十倍频,增益增加20db。
波特图如下:以下是极点图,零点图与极点图相反。
极点零点一般用于环路的稳定性分析。
附上一个零点图1、由于在CMOS里面一般栅端到地的电容较大,所以一般人们就去取这个极点,也就是说输入信号频率使得节点到地的阻抗无穷大(也就是所谓的1/RC)R为到地电阻,C为到地电容(并联产生极点)零点在CMOS中往往是由于信号通路上的电容产生的,即使得信号到地的阻抗为0,在密勒补偿中,不只是将主极点向里推,将次极点向外推(增大了电容),同时还产生了一个零点(与第三极点频率接近),只不过人们一般只关心前者。
2、经验上来讲,放大器电路中高阻抗的节点都要注意,即使这点上电容很小,都会产生一个很大的极点。
零点一般就不那么直观了,通常如果两路out of phase的信号相交就会产生零点,但这不能解释所有的零点。
3、个人觉得零点、极点只是电路分析中抽象出来的辅助方法,可以通过零极点分析电路动作特征,然而既然有抽象肯定有它的物理表现,极点从波特图上看两个作用:延时和降低增益,在反馈系统中作用就是降低反馈信号幅度以及反馈回去的时间,所以如果某个节点存在对地电容,必然会对电容充电,同时电容和前级输出电阻还存在分压,所以这个电容会产生极点!而要保持稳定,则要看在激励情况下反馈信号会不会持续增加?而这就需要分析信号在通过电路的过程中的衰减或增加和加快或者减慢,零极点这就表征了电路的这种特性,所以可能某个节点会产生极点,也可能整个系统不同信号通路相互作用产生零极点。
零、极点对控制系统的影响
广西大学实验报告纸姓名:指导老师:成绩:学院:电气工程学院专业:自动化班级:实验内容:零、极点对控制系统的影响年月日其他组员及各自发挥的作用:【实验时间】【实验地点】【实验目的】1.学会判断最小相位和非最小相位;2. 学会使用根轨迹分析系统的特性;3. 学会分析系统的响应特性;4. 学会分析最小相位和非最小相位系统的幅频特性和相频特性。
【实验设备与软件】1.MATLAB/SIMULINK软件2.计算机一台【实验原理】1、最小相位与非最小相位系统传递函数中所有极点和零点的实部均为负值时的一类线性定常系统,称为最小相位系统。
反之,传递函数中至少有一个极点或零点的实部值为正值的,称为非最小相位系统。
在具有相同幅频特性的系统中,最小相位系统的相角变化范围为最小。
最小相位和非最小相位之名即出于此。
最小相位系统特点有:(1)如果两个系统有相同的幅频特性,那么对于大于零的任何频率,最小相位系统的相角总小于非最小相位系统;(2)最小相位系统的幅频特性和相频特性直接关联,也就是说,一个幅频特性只能有一个相频特性与之对应,一个相频特性只能有一个幅频特性与之对应。
对于最小相位系统,只根据对数幅频曲线就能写出系统的传递函数。
2、180°根轨迹的画法根据教材的180°根轨迹的九条规则,画根轨迹,注意理解各条规则的正确性。
3、系统响应的求取给定的线性系统的传递函数和输入信号,其输出的复频域表示很容易得到,再对其进行反Laplace变换得到系统响应。
从系统可以看出系统的稳定性、快速性和准确性的各项指标。
4、幅频和相频特性及其判稳幅频特性表现的是各种频率信号在通过系统时的幅值增益程度;相频特性表现的是各种频率信号在通过系统时的相角滞后/超前程度。
其表现形式是Bode图。
从Bode图可以基于图判据判定相应闭环系统的稳定性。
【实验内容、方法、过程与分析】实验内容1、已知二阶系统 )15.0)(1(+++-s s c c s ,分析c 的取值对系统单位阶跃响应的影响(各种情况都要考虑周全),要求有理论分析与仿真验证。
零极点对系统的影响

增加零极点以及零极点分布对系统的影响一般说来,系统的极点决定系统的固有特性,而零点对于系统的暂态响应和频率响应会造成很大影响。
以下对于零极点的分布研究均是对于开环传递函数。
零点一般是使得稳定性增加,但是会使调节时间变长,极点会使调节时间变短,是系统反应更快,但是也会使系统的稳定性变差。
在波特图上反应为,增加一个零点会在幅频特性曲线上增加一个+20db/10倍频的曲线,幅频曲线上移,增加一个极点,会在幅频特性曲线上增加一个-20db/10倍频的曲线,幅频曲线下移。
在s左半平面增加零点时,会增加系统响应的超调量,带宽增大,能够减小系统的调节时间,增快反应速度,当零点离虚轴越近,对系统影响越大,当零点实部远大于原二阶系统阻尼系数ξ时,附加零点对系统的影响减小,所以当零点远离虚轴时,可以忽略零点对系统的影响。
从波特图上来看,增加一个零点相当于增加一个+20db/10倍频的斜率,可以使的系统的相角裕度变大,增强系统的稳定性。
在s右半平面增加零点,也就是非最小相位系统,非最小相位系统的相位变化范围较大,其过大的相位滞后使得输出响应变得缓慢。
因此,若控制对象是非最小相位系统,其控制效果特别是快速性一般比较差,而且校正也困难。
对于非最小相位系统而言,当频率从零变化到无穷大时,相位角的便变化范围总是大于最小相位系统的相角范围,当ω等于无穷大时,其相位角不等于-(n-m)×90º。
非最小相位系统存在着过大的相位滞后,影响系统的稳定性和响应的快速性。
在s左半平面增加极点时,系统超调量%pσ减小,调整时间st(s)增大,从波特图上看,s左半平面增加一个极点时,会在幅频特性曲线上增加一个-20db/10倍频的曲线,也就意味着幅频特性曲线会整体下移,导致相角域度减小,从而使得稳定性下降。
当极点离原点越近,就会增大系统的过渡时间,使得调节时间增加,稳定性下降,当系统影响越大当极点实部远大于原二阶系统阻尼系数ξ时,附加极点对系统的影响减小,所以当极点远离虚轴时可以忽略极点对系统的影响。
极点和零点电路中的意义
极点和零点电路中的意义摘要:一、极点和零点电路的基本概念二、极点和零点电路的意义1.极点:电压、电流的转折点2.零点:电压、电流的平衡点三、极点和零点在电路分析中的应用1.电压、电流的计算2.电路元件的特性分析四、实际电路案例分析正文:极点和零点电路中的意义在电路领域,极点和零点是两个非常重要的概念。
它们在电路分析、计算和实际应用中具有显著的意义。
本文将从基本概念、意义以及在电路分析中的应用等方面进行详细阐述。
一、极点和零点电路的基本概念1.极点:在电路中,极点通常指的是电压或电流发生转折的点。
例如,在交流电压或电流的正负半周期之间,电压或电流的值会发生剧变,这个转折点就称为极点。
在电路分析中,极点常常用于描述电容、电感等元件的电压或电流变化。
2.零点:零点是指电压或电流的平衡点,即电压或电流的值为零的点。
在直流电路中,电源的正负极之间的电压为零点;在交流电路中,电压或电流的瞬时值为零的点即为零点。
零点在电路分析中也具有重要作用,如用于电路元件的特性的描述和计算。
二、极点和零点电路的意义1.极点:在电路分析中,极点有助于我们理解电压、电流的变化规律。
通过分析极点,可以研究电容、电感等元件的充放电过程,以及电路中的共振现象等。
此外,在信号处理领域,极点还与信号的频率响应密切相关。
2.零点:零点在电路分析中具有实用性意义。
首先,在计算电路中的电压、电流时,零点可以作为参考点,便于进行数值计算。
其次,通过分析零点,可以研究电路元件的特性,如电阻、电容、电感等。
此外,零点还在交流电路的相位分析中起到关键作用。
三、极点和零点在电路分析中的应用1.电压、电流的计算:在电路分析中,我们需要对电压、电流进行计算。
通过分析极点和零点,可以得到电压、电流的波形和幅值,从而为电路的性能评估提供依据。
2.电路元件的特性分析:极点和零点有助于我们了解电路元件的特性,如电容、电感的充放电过程,以及电阻、电容、电感等元件对交流信号的阻抗特性。
ctle电路零极点分布
ctle电路零极点分布CTLE电路是一种用于增强信号的电路,在数字通信中广泛应用。
CTLE电路具有零极点分布特性,这种特性对于电路的性能至关重要。
本文将就CTLE电路的零极点分布对电路性能的影响进行讨论。
首先,我们来了解一下CTLE电路的结构。
CTLE电路一般由一个放大器、一个低通滤波器和一个峰值探测器组成。
其中,放大器用于放大信号,低通滤波器用于滤除高频噪声,峰值探测器用于探测信号的峰值,以便进行自适应电平调整。
在CTLE电路中,零极点分布是一个重要的特性。
对于一般的放大器电路,它的传递函数可以表示为:H(s) = (a0 + a1s + ... + anx^n) / (1 + b1s + ... + bmx^m)其中,a0 ~ anx、b1 ~ bmx是常数。
我们可以将这个传递函数化简为一个分子项和一个分母项的乘积形式:H(s) = K * (s - z1) * (s - z2) * ... * (s - zn) / [(s - p1) * (s - p2) * ... * (s - pm)]其中,K是一个常数,zi是零点,pi是极点。
在这个式子中,分母项的极点决定了电路的增益和波形失真,如果它们处于高频区域,那么电路的增益会很低,波形失真也很明显。
分子项的零点决定了电路的频率和带宽,如果它们太远或太近,就会导致电路的频率响应不稳定。
其中,K是一个常数,zi是零点,pi是极点。
我们可以看到,CTLE电路的传递函数中有两个零点和两个极点。
这两个零点和极点的位置决定了CTLE电路的增益和带宽。
如果零点和极点的位置不合适,就会导致电路性能下降。
CTLE电路中的零点和极点的位置可以通过改变电路元件的参数来调整。
例如,可以改变放大器的增益、带宽和失调电压来改变传递函数中的零点和极点的位置。
一般来说,CTLE电路的零点应该在频率响应的斜率转折点上,而极点应该在零点附近,这样可以保证电路的频率响应稳定并且增益高。
电路中零极点

电路中零极点
在电路分析中,零极点是描述电路频率特性的重要概念。
零点是指系统函数在某个特定频率处的值为零的点,而极点则是系统函数在某个特定频率处的一阶导数为零的点。
在分析电路的频率响应时,零极点可以提供重要的信息,包括系统的稳定性、增益和相位等。
在电路中,零极点的存在会影响系统的频率响应。
具体来说,一个电路系统的传递函数可以表示为一系列的零点和极点的形式。
当输入信号的频率接近零点或极点时,系统的输出信号会受到较大的影响,可能会产生幅度跳跃、相位失真等现象。
因此,通过分析电路中的零极点,可以了解系统在不同频率下的响应特性,从而优化电路设计。
在分析电路中的零极点时,通常需要使用电路分析方法和数学工具。
例如,使用交流等效电路分析方法可以得到系统函数的具体形式,然后根据数学工具求解零极点的位置。
此外,还可以使用计算机仿真软件进行电路的频域分析和参数优化。
综上所述,零极点是描述电路频率特性的重要概念,通过分析零极点的位置和特性,可以深入了解电路在不同频率下的响应特性,优化电路设计,提高系统的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
请问电路中极点与零点的产生与影响电路中经常要对零极点进行补偿,想问,零点是由于前馈产生的吗?它产生后会对电路造成什么样的影响?是说如果在该频率下,信号通过这两条之路后可以互相抵消还是什么??极点又是怎么产生的呢?是由于反馈吗?那极点对电路的影响又是什么?产生振荡还是什么??请大家指教一下。
(不能这么简单的理解其实电路的每个node都有一个极点只是大部分的极点相对与所关心的频率范围太大而忽略了运放中我们一般关心开环的0dB带宽那么>10*带宽频率的极点我们就不管了因为它们对相位裕度贡献太小而被忽略;只要输入和输出之间有两条通路就会产生一个零点:同样的高于所关心频率范围的零点也不用管一个在所关心频率范围内的零点需要看是左半平面还是右半平面的左半平面的零点有利于环路稳定右半平面的则不利具体的看拉扎维的书吧写的还是蛮详细的看不懂就多看几遍自己做个电路仿下)好问题,希望彻底了解的人仔细解答。
我也同样疑惑。
但是我总觉得极点,零点并不能单单的说是由于前馈,反馈,或者串联并联一个电容产生的。
产生的原因还是和具体的电路结构相关联的。
比如一个H(s)的系统和一个电容并联或串联在输入输出之间,谁能说他一定产生一个极点或零点呢?这因该和H(s)的具体形式有关。
3大书上说的应该大多针对的是运放结构,它的结构具有特殊性。
具有以点盖全的嫌疑。
还请达人细说。
一般的说,零点用于增强增益(幅度及相位),极点用于减少增益(幅度及相位),电路中一般零点极点是电容倒数的函数(如1/C)。
当C变大时,比如对极点来说,会向原点方向变化,造成增益减少加快(幅度及相位)~一般运放电路的米勒效应电容就时这个原理,当增益迅速下降倒-3dB时,其他的零点极点都还没对系统增益起到啥作用(或作用很小,忽略了),电路就算七窍通了六窍半了~你就可以根据自己的需要补上带宽,多少多大的裕度就KO了极点是由于结点和地之间有寄生电容造成的,零点是由于输入和输出之间有寄生电容造成的,一般输入和输出之间的零极点考虑多一点,主要是因为输入输出有较大的电阻,造成了极点偏向原点.个人的一点理解极点决定的是系统的自然响应频率,通常在电路中就是对地电容所看进去的R和对地电容C共同决定的。
零点是由于在输入输出间存在两条信号路径,两个信号路径强度相消即可,通常在电路中表现为反馈或前馈通路。
一个电路中有多少个极点和多少个零点取决你的器件模型,因为一般人们只观点几个低频极点(最多到3吧),所以将高频极点忽略了,由于在CMOS里面一般栅端到地的电容较大,所以一般人们就去取这个极点,也就是说输入信号频率使得节点到地的阻抗无穷大(也就是所谓的1/RC)R为到的电阻,C为到地的电容(并联产生极点)零点在CMOS中往往是由于信号通路上的电容产生的,即使的信号到地的阻抗为0,在密勒补偿中,不只是将主极点向里推,将次极点向外推(增大了电容),同时还产生了一个零点(与第三极点频率接近),只不过人们一般只关心前者。
看过三本经典就能理解零极点吗?I do not think so!在就是前面提到信号与系统的楼主,信号与系统的理论大家都清楚,但是用到实际中没那么简单吧'多数人都只是拿着书上类似的电路来找类似的零极点罢了。
我觉得信号与系统讲的是比较理论的东西,就是仅从传输函数的角度来分析,并没有具体到电路。
而在电路设计的时候是具体的电路,如果可以通过小信号电路写出传输函数,那么就完全可以分析零级点了,但是通常要写出一个完整的小信号电路图的传输函数,很难吧。
因此就会采用一些近似的办法,比如极点与RC的关联(在RAZAVI的书上有说)来分析。
一般要是电容太小或是电阻太大了,极点就会很大,这种情况可以忽略,只考虑比较低的极点。
至于零点主要是因为输入和输出之间出现了通路而引起的,在razavi书中文版的146-147页的分析我觉得讲的挺清楚的。
经验上来讲,放大器电路中高阻抗的节点都要注意,即使这点上电容很小,都会产生一个很大的极点。
零点一般就不那么直观了,通常如果两路out of phase的信号相交就会产生零点,但这不能解释所有的零点。
零点是由于在输入输出间存在两条信号路径,两个信号路径强度可以相消产生的很深奥的问题啊个人觉得零点、极点只是电路分析中抽象出来的辅助方法,可以通过零极点分析电路动作特征,然而既然有抽象肯定有它的物理表现,极点从波特图上看两个作用:延时和降低增益,在反馈系统中作用就是降低反馈信号幅度以及反馈回去的时间,所以如果某个节点存在对地电容,必然会对电容充电,同时电容和前级输出电阻还存在分压,所以这个电容会产生极点!而要保持稳定,则要看在激励情况下反馈信号会不会持续增加?而这就需要分析信号在通过电路的过程中的衰减或增加和加快或者减慢,零极点这就表征了电路的这种特性,所以可能某个节点会产生极点,也可能整个系统不同信号通路相互作用产生零极点。
我个人的了解是基本上有几个node就有多少个pole但是很多都是高频pole,对电路影响不大零点是由於有signal path可以对消而产生这可以看Razavi或Allen等大师的着作都有说明我认为极点是主要表征电路的具有一定的延时,而零点表示同时有两条支路到输出出现了抵消,也可以认为该电路具有使信号超前的功能。
从物理上来说,我觉得产生零极点的电路一定要有储能器件,一般来说也就是电容与电感,一般来说电容对信号有延迟作用而电感有超前作用(当然要分清楚信号是电压还是电流,但二者基本相反),出现极点,可以认为在信号通路上有了电容,出现零点,可以认为信号通路上有了电感。
当然集成电路内尤其是低频电路一般不会有电感,但电容在某些结构中是可以等效或转换为电感的。
其实一般零极点不会对应到某些具体的节点,在平时分析这种对应关系具有一定前提条件,只是我们多数分析的电路都符合这个条件。
最全面还是传输函数。
其实并不是每个节点就会对应一个极点,而一般是储能元件的个数与极点有对应关系,但要排除简并回路、简并割集(记不得是否说对这两个名词了)。
除了上面说的基本书,我强烈推荐好好看看电网络方面的分析资料,好像叫高级电路分析的书里面应该有。
关于右半平面极点振荡,左半极点稳定这个倒真是应该好好看看信号与系统了。
其实只要不是虚轴上的极点,在通过凡拉普拉斯转换后,一般是exp(-at),exp(at), a为复平面的点。
左半平面的会收敛,即阻尼振荡,或说的减幅振荡。
但右边的就是振荡了俺也谈谈我的看法:零/极点的产生与反馈与否似乎没有直接联系。
一个电路的小信号模型中存在某一个节点,这个节点有两条通路与其他节点连接,其中一条通路为电容,另一条为电阻。
那么这个节点的电压为零就可能是此电路的解,电阻那条通路的电流情况就有两种:1是流进,在这种情况下就会产生一个负极点,因为只有在频率为“负”的情况下,电容通路才会有电流流出使得流进/出此节点的电流相等;2是没有电流,意思就是通过电阻与此连接的节点也是个零点,当然也可能是地,这样就啥都没了。
其实还有一种情况是电阻被一个理想电流源代替,那么相比前面提到的情况就多了一种,那就是有电流流出,这样就产生一个正零点,这就是我们在普通两级amp中正零点一样。
2。
这个问题似乎并不重要,因为对于一个稍微复杂的电路,要直观的看出其非主零/极点是很不容易的,通过电路的小信号来计算传递函数是个不错的方法。
零/极点对电路造成的影响?这个大家都知道,就不多说了。
其实不管是正还是负,都只是一种说法,比如说负零点,直观的感觉是当频率为负多少了,然后增益就为零;但实际上频率不会为负,但是其对电路的影响依然存在,那么关键就在于你所关心的频段了。
个人认为左半平面的极点在时域引入延迟,相应的在频率响应中表现为增益和相移滞后。
这个问题应该分成几个子问题: 1. 怎么理解s平面? 2. 系统传输函数里零.极点的意义;3. 在系统传输函数里以jW替代s参数进行系统稳定性的判断,波特图的推出. 所有的前提是需要理解复数的概念电路中经常要对零极点进行补偿,想问,零点是由于前馈产生的吗?极点的产生是电容与电阻的并联,零点的产生是电阻与电容的串联.并不是所有的前馈都会产生零点,要看它前馈入径是否有并联的电阻.如果,则会产生零点,没有的话,那就不会产生零点它产生后会对电路造成什么样的影响?是说如果在该频率下,信号通过这两条之路后可以互相抵消还是什么?你说的应该OP的补偿电容吧miller电容由于前馈环路的存在,使得与miller电容串联着一个1/gm的电阻.所以产生了一个右平面的零点.(反了吧,右零点相移-90不稳定,左零点相移90,稳定他两的增益都是以20db/十倍频增加的)右平面的零点使得增益以+20db/dec增加,相移增加90度,使系统更不稳定.左平面增益以+20db/dec增加,相移减少90度,对系统的稳定性有积极的补偿作用.对前馈环路的零点的补偿一般是把右平面的零点转换为左平面的零点.极点又是怎么产生的呢?是由于反馈吗?那极点对电路的影响又是什么?产生振荡还是什么??极点的产生就是由于引入电容与电阻的并联,产生极点的频率就是1/RC.这个与反馈无关,虽然反馈可以产生极点,但是,并不是所有的极点都是反馈产生的.极点对OP的增益是以-20db/dec减小,相移是增加90度.环路是否震荡,直接原因是环路的相位裕度是否>0.大于则系统稳定,小于0则系统震荡我也同意:极点决定的是系统的自然响应频率,通常在电路中就是对地电容所看进去的R和对地电容C 共同决定的。
零点是由于在输入输出间存在两条信号路径,两个信号路径强度相消即可,通常在电路中表现为反馈或前馈通路极点是由于结点和地之间有寄生电容造成的,零点是由于输入和输出之间有寄生电容造成的,一般输入和输出之间的零极点考虑多一点,主要是因为输入输出有较大的电阻,造成了极点偏向原点对于零点,个人认为零点的产生是与前馈有关,前馈路径与主信号通路的叠加以及相消产生了零点,当叠加时产生左半平面零点有助于稳定性,当相消时产生右半平面零点,这对系统的稳定性很不利,因此要抵消它零点可以由两条环路产生,原理是两条环路的滞后不同时,就形成了相对的前馈也可以由电阻串电容产生,其实说到底都是相位超前的原因。
极点和环路没有关系,极点只是一个相位滞后,至于经常和环路被一起提到,是因为极点对环路的稳定性有决定性的影响把电容电感都用阻抗表示,根据基尔霍夫定律写出系统(电路)的传输函数,极点在下面,零点在上面。
其实只要知道传输函数,利用信号与系统学到的知识分析一下就清楚了。
建议多看看信号与系统说说我的理解:一般地,零点可以增加增益,极点减少增益,而我们在反馈的时候,是希望在相位下降到180度之前,增益就已经降低到一,所以我们需要消除一个零点,以免发生震荡我感觉是同一个node 有较大的R 同时又有较大的 C 的时候就会产生极点,R 或 C 越大极点就越低。