INMOTION R1(乐行平衡车)用户手册V1.2
Robin产品手册-易步机器人有限公司
●感谢您选择并购买Robin!●Robin是一款自动保持平衡的电动平衡车。
●《产品手册》旨在帮助您快捷地组装、使用、维护Robin。
●了解驾驶Robin的安全警告和注意事项非常重要。
产品手册·该说明书适用于东莞易步机器人有限公司所生产的Robin系列电动平衡车·●当您驾驶Robin时,您有可能失去控制、碰撞和摔倒。
因此您必须学习如何安全驾驶Robin,以避免危险。
●您可以通过查看《产品手册》和安全视频学习安全驾驶技术。
●本产品手册向客户告知所有操作说明和注意事项,Robin产品使用者必须仔细阅读并按本说明书的要求操作,如果产品使用者未按提示操作或违反警示内容,所产生的一切后果,东莞易步机器人有限公司将不负法律责任。
●如果想得到产品的相关服务支持,您可以联系代理商;您可以登陆东莞易步机器人有限公司网站()查看各代理商的相关信息。
●所有认证代理商可以到东莞易步机器人有限公司网站查看。
1.1文档概述 (2)1.2相关用户手册 (2)1.3文档相关说明 (2)2.产品介绍 (3)2.1Robin车型描述 (3)2.2记录Robin相关序列号 (3)2.3Robin如何工作 (3)3.安装Robin (3)3.1检查Robin包装箱内各部件是否齐全 (3)3.2组装Robin (4)4.Robin控制及信息显示装置 (5)4.1Robin遥控 (5)4.2脚踏传感器 (5)4.3显示板 (6)5.电池使用说明 (6)5.1电池电量为零 (6)5.2充电步骤 (6)5.3温度过高或者过低情况 (7)5.4电池详细规格说明 (7)5.5运输电池时注意事项 (7)6.安全使用Robin (8)6.1驾驶者的重量限制 (8)6.2最大行驶距离 (8)6.3速度限制 (8)6.4震动警告 (9)7.学习驾驶Robin (9)7.1启动Robin (9)7.2安全停车 (9)7.3驾驶步骤 (10)7.4驾驶练习 (10)8.驾驶安全指导 (10)9.维护和保养 (12)9.1搬运Robin (12)9.2车轮的维护 (12)9.3清洁 (12)9.4存放 (12)10.Robin零件 (13)11.Robin参数 (13)12.故障处理 (13)祝您使用愉快 (13)1. 文档概述1.1 文档概述● 描述安全和警告信息,以确保每一位驾驶者都能安全驾驶Robin 并享受其带来的乐趣 ● 介绍Robin 的各个零部件 ● 讨论组装Robin 的步骤 ● 描述驾驶安全注意事项 ●提供详细的驾驶方法及技巧1.2 相关用户手册《产品手册》旨在帮助您正确组装和使用Robin ,更加详细和综合的信息请查看安全视频。
乐行平衡车的工作模式
乐行平衡车的工作模式为了获得更完美的驾驶体验,乐行平衡车可以选择切换十几种工作模式,下面,我们就其中一些比较重要的模式,做一个简单的介绍:一、空闲模式在开机后,即进入空闲模式。
大部分其他模式,需要从该模式下进入。
二、载人模式载人时所处的工作模式。
踏板角度小于2°时会进入该模式。
该模式下,存在两种情况,即训练模式和普通模式。
建议新手初次接触、驾驶乐行平衡车时,务必采用训练模式,在安全空旷的场地上进行练习,直到您可以安全舒适地上车,熟练地前后控制车辆,转向,停车,下车之后,您才可以采用普通模式进行练习。
三、主动放平模式在驾驶者的脚(通常是单只脚)放上车之后,如果踏板角度适中(大于2°,小于15°。
踏板角度过大,则会影响上车时的体验,过小,则会进入载人模式),则系统将会主动控制踏板放平,此时乐行平衡车可能会往后运动一小段距离。
四、角度过大模式在驾驶者的脚(通常是单只脚)放上车之后,如果踏板角度过大(大于15°),乐行平衡车的踏板将会震动,以提醒驾驶者缓慢放平踏板。
在放平过程中,会经过主动放平模式和载人模式。
五、自检模式在需要遥控器的控制下,车体可以进入自检模式。
在自检模式下,车体可以进行一些校准和自我检测工作。
六、错误处理模式当系统检测到错误或者警告时,将会自动进入该模式,此时系统将会主动控制车体减速并停车,在停车后,系统将视错误的严重程度来决定是否将车锁定。
车一旦锁定,则无法再度开启,需要送到乐行天下授权代理商或乐行天下售后部门进行检修。
七、助力模式在助力模式下,乐行平衡车将根据初始角度和地面倾斜角提供一定的助力,方便用户搬运,上坡(非骑行)等。
八、自动行走模式自动行走模式,是一种无人平衡模式,需要手机客户端的支持才能进入。
在自动行走下,用户可以通过手机客户端对乐行平衡车进行有效地遥控,或者设置动作序列,让其可以按照事先编制好的动作自动执行。
九、睡眠关机模式该模式下,系统处于等待遥控器开机的状态。
电动滑板车说明书
DO NOT use in dangerous area, where the exploding or catching fire may be caused by something inflammable, explosive or steam, liquid, dust and fiber.
2.3 Folding chart
1.Loosen the folder fixing ring.
Safety measurements should be taken before riding, eg: wear sportswear, helmet, kneecap, elbow pads and so on.
DO NOT ride when it rains.
baby
DO NOT ride with loading DO NOT ride with two people or more, only for one rider.
Warnings: Improper operation may result in personal injury. Tips: Helpful advice & clues for the usage of E-scooter. ● Should you have any inquiries, please contact the supplier immediately.
Beginner mode: no characters in the gear position
Normal mode: gear characters display white
Sports mode: gear characters display red
MotionRT7使用说明书

MotionRT7使用说明书深圳市正运动技术有限公司修订记录日期修订版本修订描述2022.07.11 1.0用户手册的初步创建和制作2022.09.27 1.1内容的修改和补充增加2022.10.12 1.2内容修改目录第一章MotionRT简介 (1)第二章安装驱动 (3)2.1驱动安装 (4)2.2普通网卡安装ECAT总线协议 (14)第三章RT控制台 (17)3.1主界面 (17)3.2UpdateCard界面 (18)3.3License界面 (18)3.4Config界面 (19)第四章功能列表 (20)第五章使用方法 (22)第六章子卡相关指令 (28)6.1CARD_INFO (28)6.2CARD_INFO写入 (29)6.3?*CARD (29)6.4AXIS_ADDRESS (30)6.5REG_CARD (30)第七章注意事项 (32)7.1安装和卸载 (32)7.2UpdateCard更新PCI设备和总线配置保存 (35)7.3License参数配置 (35)7.4Config参数配置 (36)7.5AddECAT总线配置 (36)7.6Start Stop (36)7.7其他 (37)第八章Windows环境配置注意事项 (38)8.1防火墙选项 (38)8.2电源选项 (38)8.3运行库配置 (39)8.4关闭Windows10自动修复功能 (39)8.5关闭Windows10自动更新功能 (40)第一章MotionRT简介MotionRT是正运动实时环境,目前已经开发到第七代。
MotionRT版本规格匹配产品MotionRT1实时运动(RtMotion)实时BASIC(RtBasic)ZMC0系列ZMC1系列ECI1/2/3系列MotionRT2实时运动(RtMotion)实时BASIC(RtBasic)实时梯形图(RtPlc)ZMC2系列MotionRT3实时运动(RtMotion)实时BASIC(RtBasic)实时梯形图(RtPlc)实时组态(RtHmi)ZMC3系列XPLC3系列MotionRT4实时运动(RtMotion)实时BASIC(RtBasic)实时梯形图(RtPlc)实时组态(RtHmi)实时总线(Ethercat,Rtex,XY2)ZMC4系列MotionRT5实时运动(RtMotion)实时BASIC(RtBasic)实时梯形图(RtPlc)实时组态(RtHmi)实时总线(Ethercat,XY2)机器视觉(ZVision)实时Linux(ARM)快速本地LOCAL接口VPLC5系列MotionRT6实时运动(RtMotion)实时BASIC(RtBasic)实时梯形图(RtPlc)实时组态(RtHmi)实时总线(Ethercat)机器视觉(ZVision)VPLC6系列实时Linux(X64)快速本地LOCAL接口MotionRT7实时运动(RtMotion)实时BASIC(RtBasic)实时梯形图(RtPlc)实时组态(RtHmi)实时总线(Ethercat,XY2)机器视觉(ZVision)实时Windows(X64)快速本地LOCAL接口VPLC7系列,普通PC,工控机MotionRT软件特点(1)快速搭建实时应用:相比RTX等实时环境,MotionRT带有易用的实时Basic语言,梯形图,组态等编程语言,快速上手。
两轮平衡车说明书

本车严禁未成年人使用 请自觉遵守当地交通管理条例 驾驶时必须佩戴头盔以及护套 购买本车后请认真阅读本《用户手册》所描述的有关驾驶指引。 如因未按照上述说明操作发生意外,本公司一概不负责,请谨慎驾驶。 当然,将所有与操作及保养双轮平衡车平衡车有关的危险逐一列举出来是不现实的,也是 不可能的。因此,仍需您本人做出及时准确的判断,请随时留意自身以及他人的安全。 本手册包含重要的安全信息---请仔细阅读。
加速或减速。
三、双轮平衡车的启动
4
1. 一只手扶住转向杆,使踏板保持水平,打开电源开关,面板上液晶电量板常亮按百分比 的电量显示,启动完毕(如图 2,3,4),然后双手紧握双轮平衡车手柄(如图 5)。
图2
图3
图4
图5
2. 错误的启动操作 由于双轮平衡车会把当前踏板平面位置作为初始位置设定,所以踏板不平的话,人站
体感平衡车用户手册
欢迎使用
本《用户手册》做为双轮平衡车出售时,应将其随车一并交付用户。 本《用户手册》适用于本公司生产的所有双轮平衡车产品系列。由于产品有不同系列,某 些功能与您所购买的产品系列会有差异,属于正常情况。 本手册中所包含的内容及技术规格在被许可印刷时均视为有效。但是,我司保留随时终止
上去比较困难的,初始平面位置可以通过关闭电源开关,调整,再次启动电源开关以达到 最佳使用状态。
3.正确启动如下:车体启动前必须保持水平。图 6
5
图6
四、双轮平衡车遥控器的功能及模式切换
1.正常启动 打开电源开关,打开电源,嘀一声,液晶电量板按百分比的电量显示,100%表示满电, 50%
要及时充电。踩上踏板,双轮平衡车立刻启动平衡进入工作状态,这时平衡车的转向较灵敏, 最高限速 18KM/H。
MOTION说明书

7
简体中文
4. 如何充电
使用微型 USB 线缆将耳机插入电脑上的任何可 用 USB 连接孔。
4.2 使用壁式充电器充电
使用壁式充电器将耳机插入电源。
注意:出于安全原因,建议充电时不要使用耳机。
8
简体中文
4.1 使用微型 USB 线缆充电
4.3 电池电量状态
使用中
50% - 100% 10% - 50% 0% - 10%
6.1 忙碌指示灯 15 6.2 处理多个来电 15 6.3 语音命令开启/关闭 16 6.4 语音命令 16 6.5 语音提示 17
2
简体中文
1. 欢迎使用............................................4 2. 耳机概览............................................5 3. 如何佩戴........................................... 6
对麦克风设 定静音/解除 静音
通话过程中轻按语音和对麦克风设 定静音按钮,可以将麦克风静音。 再 次轻按此按钮可解除静音。
14
简体中文
6.1 忙碌指示灯
来电指示(快速闪烁的红色指示灯) 通话中指示(慢速闪烁的红色指示灯)
注意:可以使用 Jabra Connect 应用程序打开/关闭忙碌 指示灯。
3
简体中文
7.2 休眠模式 20
1. 欢迎使用
JABRA MOTION 的功能 动作感应技术,可实现通话控制、增强的音效 并且延长电池寿命 休眠模式,可延长电池寿命 智能型音量控制,可根据周围环境自动调整 NFC 近场通讯技术 音量触摸控制 语音控制 高清语音 享受无线自由 Noise Blackout™ 3.0 噪音阻隔技术 风噪声防护 Jabra SafeTone™ 技术,能够保护您的听力 忙碌指示灯 可调整高度,完美贴合
fotbot平衡车说明书
fotbot平衡车说明书用户手册自动平衡电动车非常感谢您选择自动平衡电动车系列。
自动平衡电动车是一种高科技的,轻便的,并且双轮自动平衡的电动车。
《用户手册》可以指导了解自动平衡车的功能及完成用法。
警告!在你开始熟悉如何操作之前,您要保持平衡车在最好的状态,以防发生事故,摔倒,或者失去控制等。
《用户手册》可以帮助你学习安全驾驶电动平衡车。
《用户手册》已告诉所有的指示和注意事项,操作人员必须仔细阅读并遵循这些指示。
如果操作人员未能遵循这些指示或者违反警告,本公司不会承担任何相关的责任。
如果您想获得更多的服务和技术帮助,您可以联系我们当地的代理商或者是本公目录MACRO第一章:基本信息1.关于手册2.驾驶风险3.操作之前的准备4.相关解释第二章:生产指令1.电动平衡车的描述2.配件3.操作原理第三章:附件1.脚踏板感器2.指标第四章:安全地使用1.操作者的重量限制2.充电3.最大化速度第五章:学习如何使用它1.操作步骤2.功能保护3.实践驾驶第六章:安全开车第七章:电池使用1.电池容量2.充电步骤3.温度过高或过低4.电池参数5.电池流放第八章:自动平衡车的维修1.清洁2.贮藏第九章:电东平衡车的规格第十章:装箱单第一章:基本信息1.关于手册在操作这个工具之前,请阅读所有安全装配和操作指示。
《用户手册》可以帮助您了解自动平衡车的功能和完整用法。
用户手册适用于我们工厂生产的所有智能自动平衡车。
如果您有什么问题或者是不能得到您想要的信息手册,请立即联系我们当地的代理商或者公司。
2.驾驶风险自动平衡电动车是一种智能交通和娱乐工具,其技术和生产过程经过了认真测试。
如果您不按照手册要求操作的话,可能会导致受伤。
警告!无论何时何地跌倒、失去控制、摔倒等,包括违反用户手册的规则可能会导致伤害你甚至是死亡。
为了避免受伤,请您仔细阅读手册。
3.操作前的准备使用前,应检查电池是否充满电,请在第七章中找到更多的细节。
如果您不遵守手册的规则,您会受伤。
Ergotron 1x 用户指南说明书
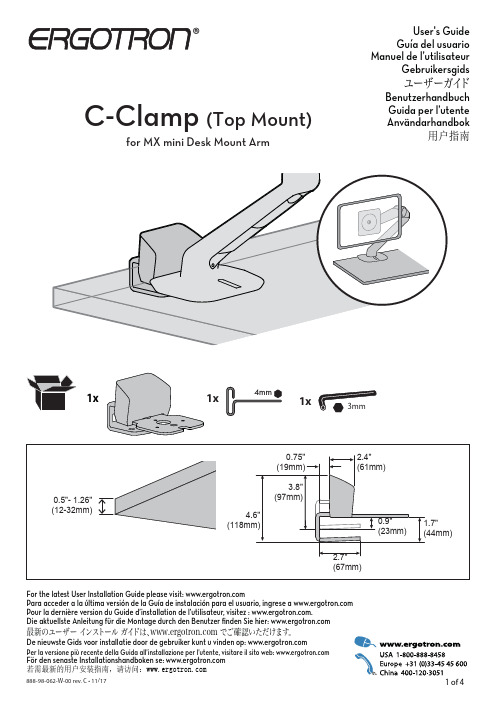
3 of 4
For Warranty visit: /warranty For Service visit: For local customer care phone numbers visit:
࠷৽ͷϢʔβʔΠϯετʔϧΨΠυɺXXXFSHPUSPODPNͰ֬͝ೝ͍͚ͨͩ·͢ɻ De nieuwste Gids voor installatie door de gebruiker kunt u vinden op: Per la versione più recente della Guida all’installazione per l’utente, visitare il sito web: För den senaste Installationshandboken se: 若需最新的用户安装指南,请访问:
888-98-062-W-00 rev. C • 11/17
1 of 4
a
b
Remove clamp if present
a
mm
b
3mm
3mm
3x
M x mm Screws provided with Arm
2 of 4
888-98-062-W-00 rev. C • 11/17
a
b
c
d
mm
888-98-062-W-00 rev. C • 11/17
保証書をご覧ください: /warranty サービスをご覧ください: 最寄りのカスタマー ケアの電話番号については、こちらをご覧ください:
Ga voor garantie naar: /warranty Ga voor service naar: Plaatselijke telefoonnummers voor de klantendienst kunt u vinden op:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1.文档概述 (7)1.1.关于本手册 (7)1.2.驾驶的风险 (7)1.3.驾驶前的准备工作 (7)1.4.相关文档与资料 (8)1.5.相关约定 (8)2.产品概述 (9)2.1.产品尺寸 (9)2.2.产品序列号 (10)2.2.1.产品参数概述 (10)2.3.产品工作原理 (11)2.4.产品主要组成部分 (13)2.5.安装乐行体感车 (14)2.5.1.检查包装箱 (14)2.5.2.组装乐行体感车 (14)2.6.遥控器 (16)2.6.1.遥控器的按钮与显示界面 (17)2.6.2.遥控器的功能与操作 (20)2.7.人机面板与声音提示 (22)2.7.1.人机面板 (22)2.7.2.声音提示 (24)2.8.车体工作模式 (24)2.8.1.车体工作模式简介 (24)2.8.2.各工作模式之间的状态转换图 (26)2.9.车灯 (27)2.10.脚踏传感器 (27)2.11.通讯与外部接口 (28)2.11.1.WIFI接口 (28)2.11.2.GPRS与GPS (29)B充电接口 (30)2.12.手机客户端 (30)3.使用乐行体感车 (31)3.1.骑行乐行体感车 (31)3.1.1.驾驶前的注意事项 (31)3.1.2.启动乐行体感车 (32)3.1.3.上车 (33)3.1.4.前进后退 (34)3.1.5.减速停车 (35)3.1.6.转向 (36)3.1.7.下车 (37)3.1.8.保护您的乐行体感车 (38)3.1.9.关机 (38)3.2.驾驶练习 (38)3.3.新手模式与普通模式 (39)3.4.助力模式 (39)3.5.自动行走模式 (40)3.5.1.遥控模式 (40)3.5.2.动作序列 (40)3.6.自检模式 (41)3.7.安全警报 (42)3.7.1.过速保护 (42)3.7.2.安全停车 (43)3.7.3.振动提示 (44)3.8.环境因素对整车性能的影响 (45)3.8.1.行驶里程 (45)3.8.2.高温骑行 (45)3.8.3.低温骑行 (46)3.8.4.爬坡 (46)3.8.5.下坡 (46)4.电池使用 (47)4.1.安全使用电池 (47)4.2.电池规格 (47)4.3.充电 (48)4.3.1.充电方法 (48)4.3.2.充电指示 (49)4.4.更换电池 (49)4.5.电池运输 (50)5.安全驾驶注意事项 (52)5.1.必须遵守的事项 (52)5.2.严格禁止的事项 (53)5.3.文明安全驾驶注意事项 (54)6.保养与维护 (56)6.1.搬运 (56)6.1.1.使用方向操纵杆搬运 (56)6.1.2.使用提手搬运 (56)6.2.清洁 (57)6.3.存放 (57)6.4.保养 (57)7.常见故障处理 (59)7.1.常见故障列表 (59)7.2.无法开机 (60)7.3.无法进入载人模式 (61)7.4.容易出现抖动 (61)7.5.转向出现问题 (61)7.6.无法关机 (62)7.7.手机客户端无法连接乐行体感车 (62)8.联系方式与法务信息 (63)8.1.问题反馈 (63)8.2.联系我们 (63)8.3.遵守当地法律条款 (63)1.文档概述1.1.关于本手册为了您的驾驶安全,在使用乐行体感车之前请仔细阅读本手册,并请认真观看驾驶指导视频,确保能够按照正确的指导驾驶乐行体感车。
知晓本手册所列出的所有安全警告和注意事项,有助于您更好的驾驶乐行体感车。
本手册适用于深圳乐行天下科技有限公司所生产的INMOTION R1以及INMOTION R1S两种型号的产品。
如果您有任何疑问,或无法从本手册中获取您所需的信息,请及时联系乐行天下授权代理商或乐行天下售后部门。
1.2.驾驶的风险乐行体感车是一个具有自动平衡系统的智能代步与生活娱乐辅助工具,其技术与生产过程进行了严格的检验,但是,当您不按照本手册所规定的安全警示来使用,将有可能给您带来伤害。
1.3.驾驶前的准备工作开始使用前,首先需要将乐行体感车组装起来并确认组装到位,将电池持续充电5小时以上,具体的部件安装与电池充电方法,请查看本手册的“2.5安装乐行体感车”以及“4.3充电”章节。
1.4.相关文档与资料乐行体感车《用户手册》的PDF格式文档,《安全视频》的视频文件,手机客户端及其帮助文档,均可从深圳乐行天下科技有限公司官方网站:下载。
1.5.相关约定2.产品概述2.1.产品尺寸2.2.产品序列号产品序列号是产品的唯一标识符,用于产品的质量追踪、售后服务、保险索赔、丢失确认等。
请务必将该序列号记录并保存好。
产品序列号是一个由16个字符组成的序列,通常伴随着一维条形码。
您可以从以下的位臵获取产品的序列号:产品外包装上获取;产品保修卡上获取;从车体上获取,(具体位臵为取下电池后的车体电池腔内)。
2.3.产品工作原理乐行体感车的工作原理,类似人体自身的平衡系统,当身体重心前倾时,为了保证平衡,您需要往前走;重心后倾时同理。
在驾驶乐行体感车的时候,乐行体感车的两个轮子就代替了双脚,同样,当您前倾时,系统会自动感应到,并精确地驱动轮子向前运动,以保持平衡;当重心后倾时,轮子也会向后运动。
乐行体感车采用动态平衡原理,利用其内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动电机进行相应的调整,以保持系统的平衡。
当您旋转方向操纵杆时,系统会相应地控制左右两边的速度差,实现转向。
在骑行时,将方向操纵杆指向您需要前进的方向,车体将会朝着您指向的方向行驶。
当方向操纵杆处于车体正中间位臵时,系统将朝正前方行驶。
在转向时,让您的身体跟随方向操纵杆倾斜的方向倾斜,将会获得更好的转向体验。
2.4.产品主要组成部分2.5.安装乐行体感车2.5.1.检查包装箱2.5.2.组装乐行体感车第一步:将把手握按图示方向插入伸缩杆组件上杆(即比较纤细的那段伸缩杆)中,用螺丝锁紧(螺丝和锁紧工具均有配送,请注意把手握的前后方向)。
第二步:在快拆锁紧扣松开的状态下,将第一步安装好伸缩杆按图示方向插入乐行体感车的转向接头上,直插到底后,用快拆锁紧扣扣紧即可(注意:当伸缩杆未插到底时快拆锁紧扣将无法扣紧)。
安装好的这部分叫方向操纵杆,它包括把手握、伸缩杆组件、转向接头三个部分,需要时您可通过快拆紧锁扣快速拆装方向操纵杆;第三步:从乐行体感车电池组包装盒中取出电池。
将车体向前倾斜,并扶稳车体。
按照图示3方向将电池对准电池槽,用力将电池顺着方向往插槽里推,当听到“嗒”的一声后,请您再尝试轻拉一下电池如无法拉出即表示已经安装到位;第四步:按下乐行体感车主体后部圆形启动按钮,车体前灯尾灯同时点亮1秒,然后熄灭,以提示车体已经从睡眠模式激活,此时便可使用遥控器正常操作乐行体感车。
2.6.遥控器乐行体感车的遥控器是一个可充电式、可升级、带有信息显示和控制功能的设备。
您可以使用遥控器对乐行体感车进行操作,并监控其工作状态。
遥控器拥有3个控制按钮和一个LCD电子显示屏,遥控乐行体感车的有效通讯距离为5~10m(取决于工作环境和使用方法)。
遥控器尾端具有USB接口,您可以通过Micro USB连接线连接电脑来查看车体信息,同时此连接也可以给遥控器充电,遥控器自身电量不足时会有电量不足的标志提示,约2个小时可完成遥控器的充电。
2.6.1.遥控器的按钮与显示界面遥控器的显示界面,可以显示乐行体感车的工作状态和提示信息,如速度,里程,电量等。
其显示区域如下图所示:2.6.2.遥控器的功能与操作与乐行体感车车体相关的方面,遥控器具备开机、关机、锁车、解锁等功能;遥控器自身方面,具备启动、关闭遥控器,配对,进入、退出SHIFT模式、开启屏幕背光等功能。
这些功能都通过3个按键来触发,因此需要用到不同的按键方式来实现相应的功能。
遥控器的按键分为点击、长按和组合按键3种操作方式,其中,点击定义为按键按下后立即释放,长按定义为按下按键大于2秒(长按功能触发后,在按键释放之前不会重复触发),组合按键仅包含开机+切换键这一组合形式,其定义为首先按住开机键不放,然后点击切换键。
由于遥控器功能较为复杂,因此,系统设计了一个SHIFT模式,将一些不常用的功能放在了SHIFT模式下。
即进入SHIFT 模式后,所有的按钮动作将会表示不同的意义。
说明:表格中“N/A”表示该按键在该状态下无作用。
部分功能在载人时执行可能会导致危害,所以这部分功能只有在车体处于非载人状态下操作才生效,包括:关机、锁车/解锁、自检、进入/退出助力模式和关闭车体电源。
锁车/解锁具体功能取决于当前状态,若当前为锁车状态,则为解锁功能,否则为锁车功能。
遥控器背光开启后,30秒内没有按键动作,则自动关闭背光。
载人模式下,点击开机键,可播放喇叭提示音。
当车体关机、遥控器休眠的情况下,长按开机键可唤醒遥控器。
除了在SHIFT模式下通过长按锁车键可关闭遥控器之外,在一定时间内无按键动作产生,遥控器也会自动关闭。
超时时间根据遥控器与车体的状态不同而不同,具体如下:遥控器未与车体配对时:1分钟;遥控器已与车体配对,但是失去连接或车体不处于载人模式时:3分钟;遥控器已与车体配对并连接,且车体处于载人模式时:10分钟。
遥控器关闭后,可通过点击切换键重新开启。
2.7.人机面板与声音提示2.7.1.人机面板人机面板是车体上用于描述车体的工作状态的LED显示界面,如下图所示:2.7.2.声音提示乐行体感车内臵一个扬声器,可以根据不同的工作模式和状态进行声音提示。
在默认情况下,声音是打开的,如果驾驶者希望静音,可以使用手机客户端设臵关闭声音提示。
为了更大程度上的增加您对车体掌控的自由度,您可以通过手机客户端,对各种不同的事件和状态的声音进行自定义。
具体操作,请查看相关客户端的帮助文档。
2.8.车体工作模式2.8.1.车体工作模式简介乐行体感车存在十多种工作模式,这里将对其中一些重要的工作模式进行简单描述:2.8.2.各工作模式之间的状态转换图2.9.车灯乐行体感车设计有炫酷的蓝色LED前灯和红色LED尾灯。
LED前灯和尾灯在乐行体感车在运行时会根据不同的操作对在遥控器的SHIFT 模式下,通过点击切换键,可以控制前灯常亮,或者恢复默认模式;若需要完全关闭前灯和尾灯,可以在手机客户端里进行操作进行关闭,关闭之后,遥控器将不能对此功能进行操作。
2.10.脚踏传感器乐行体感车采用脚踏传感器来检测人是否踏在踏板上。
脚踏传感器的原理类似于体重秤,其可分辨出单脚,双脚,以及是否载重。
脚踏传感器的引入,可以帮助乐行体感车更好地识别出人在车上的状态,有利于系统对新手模式下的各种状态的处理。
同时,脚踏传感器的引入,带来的一个全新功能,即可以获得驾驶者的体重,该体重将可以在手机客户端上显示出来,方便您观察自己的体重变化。