机械原理与机械设计-上册课后答案
《机械原理》课后习题附答案
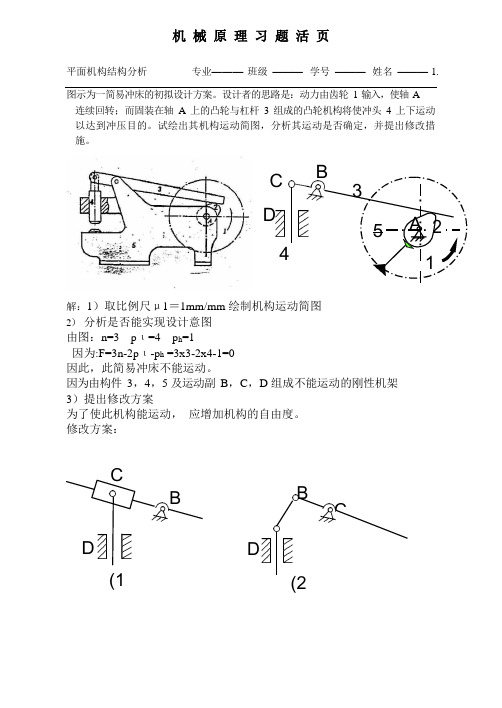
CB D BC平面机构结构分析专业———班级———学号———姓名——— 1.图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1 输入,使轴A连续回转;而固装在轴A 上的凸轮与杠杆3 组成的凸轮机构将使冲头4 上下运动以达到冲压目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
C B 35 A 24 1解:1)取比例尺μ1=1mm/mm 绘制机构运动简图2)分析是否能实现设计意图由图:n=3 pι=4 p h=1因为:F=3n-2pι-p h =3x3-2x4-1=0因此,此简易冲床不能运动。
因为由构件3,4,5 及运动副B,C,D 组成不能运动的刚性机架3)提出修改方案为了使此机构能运动,应增加机构的自由度。
修改方案:D(1 (2DG7D 64C EF9 38B 2 A122如图所示为一小型压力机。
图中齿轮 1与偏心轮 1’为同一构件,绕固定轴心 o 连续转动。
在齿轮 5上开有凸轮凹槽,摆杆 4上的滚子 6嵌在凹槽中,从而使摆杆 4 绕 C 轴上下摆动。
同时,又通过偏心轮 1’、连杆 2、滑杆 3使 C 轴上下移动。
最后通过在摆杆 4的叉槽中的滑块 7和铰链 G 使冲头 8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
b)解:计算该机构的自由度n=7, p ι=9, p h =2 F=3n-2p e -p h =3x7-2x8-2=13. 试计算下列二图所示齿轮连杆组合机构的自由度。
图中相切的圆周表示一对齿轮传动的节圆;凡局部自由度、复合铰链和虚约束均需明确指出。
解:a )解n=4 P ι=5 Ph=1F=3x4-2x5-1=134 C A复合铰链1a)BD 5b)解:n=6 Pι=7 Ph=3F=3×6-2×7-3=14.试计算下列二图所示压榨机的自由度。
图a 中,左右两半完全对称;图b 中,CD = FI = KL = KM = FJ = CE,LI =KF = MJ = JE = FC = ID。
机械原理课后习题答案

《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
或修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:∵v p13=ω1P16P13μl=ω3P36P13μl∴i13=ω1/ω3=P36P13 / P16P13(1) ∵a+d=3.5 ,b+c=4∴a+d<b+c又∵最短杆为连架杆∴此机构为曲柄摇杆机构,可以实现连续转动与往复摆动之间的运动变换。
机械原理与机械设计及答案((01461)

机械原理与机械设计及答案(01461)一、选择题(共75小题,每题2分,共150分)1、复合铰链处的转动副数等于【】A.主动件数B.构件数-1C.构件数D.活动构件数-12、在平面机构中,每增加一个低副将引入【】A.0个约束B.1个约束C.2个约束D.3个约束3、机构具有确定相对运动的条件是【】A.机构自由度数等于主动件数B.机构自由度数大于主动件数C.机构自由度数小于主动件数D.机构自由度数大于等于主动件数4、某平面机构有5个低副,1个高副,机构自由度为1,则该机构具有的活动构件是【】A.3B.4C.5D.65、在平面机构中,每增加一个高副将引入【】A.0个约束B.1个约束C.2个约束D.3个约束6、在速度低、载荷大、不需要经常加油或灰尘较多的情况用【】A.润滑油B.固体润滑剂C.润滑脂D.气体润滑剂7、双曲柄机构中,已知杆长a=80(为最短杆),b=150,c=120,则d杆长度为【】A. d<110B.110≤d≤190C. d<190 D.d>08、四杆机构处于死点时,其传动角γ为【】A. 0°B. 0°<γ<90°C. 90°D. >90°9、在曲柄摇杆机构中,当曲柄为主动件,摇杆为从动件时,可将【】A.连续转动变为往复移动B.连续转动变为往复摆动C.往复移动变为转动D.往复摆动变为连续转动10、对于平面连杆机构,通常可利用下列哪种构件的惯性储蓄能量以越过机构的死点位置?【】A.主动件B.连杆C.从动件D.连架杆11、将曲柄摇杆机构演化为双曲柄机构的方法是【】A.将回转副的尺寸扩大B.用移动副取代转动副C.增大构件的长度D.以最短杆件作机架12、曲柄摇杆机构中,摇杆为主动件时,死点位置是【】A.不存在B.曲柄与机架共线时C.摇杆与连杆共线时为D.曲柄与连杆共线时13、曲柄摇杆机构处于死点位置时,角度等于零度的是【】A.压力角B.传动角C.极位夹角D.摆角14、“最短杆与最长杆长度之和大于其余两杆长度之和”的铰链四杆机构为【】A.曲柄摇杆机构B.曲柄滑块机构C.双曲柄机构 D.双摇杆机构15、平面连杆机构的急回特性可用以缩短下列哪种情况来提高生产效率?【】A.非生产时间B.生产时间C.工作时间D.非工作时间16、对于外凸的凸轮轮廓,从动杆滚子半径必须比理论轮廓曲线的最小曲率半径【】A.大B.小C.等于D.不确定17、与连杆机构相比,凸轮机构最大的缺点是【】A.惯性力难以平衡B.点、线接触,易磨损C.设计较为复杂D.不能实现间歇运动18、凸轮从动件作等加速等减速运动时,其运动始末【】A.有刚性冲击B.没有冲击C.既有刚性冲击又有柔性冲击D.有柔性冲击19、与其他机构相比,凸轮机构最大的优点是【】A.可实现各种预期的运动规律B.便于润滑C.制造方便,易获得较高的精度D.从动件的行程可较大20、凸轮轮廓与从动件之间的可动联接的运动副是【】A.移动副B.低副C.转动副D.高副21、正常齿渐开线标准圆柱直齿轮的齿顶高系数和顶隙系数分别为【】A.1和0.1B.1和0.2C.1.2和0.2D.1和0.2522、一对圆柱齿轮啮合时,两齿轮始终相切的是【】A.分度圆B.基圆C.节圆D.齿根圆23、使渐开线齿廓得以广泛应用的主要原因之一是【】A.中心距可分性B.齿轮啮合重合度大于1C.传递力矩大D.啮合线过两齿轮基圆公切线24、在圆柱齿轮传动中,常使小齿轮齿宽略大于大齿轮齿宽,其目的是【】A.提高小齿轮齿面接触疲劳强度B.提高小齿轮齿根弯曲疲劳强度C.补偿安装误差以保证全齿宽的接触D.减少小齿轮载荷分布不均25、齿数z1=20,z2=80的圆柱齿轮传动时,齿面接触应力是【】A.σH1=0.5σH2B.σH1=σH2C.σH1=2σH2D.σH1=4σH226、一对标准直齿圆柱齿轮,若z1=18,z2=72,则这对齿轮的弯曲应力【】A.σF1>σF2B.σF1<σF2C.σF1=σF2D.σF1≤σF227、当两渐开线齿轮的中心距略有改变时,该对齿轮的【】A.传动比和啮合角都不变B.传动比有变化,但啮合角不变C.传动比不变,但啮合角有变化D.传动比和啮合角都有变化28、圆柱齿轮传动,当齿轮直径不变而适当减少模数时,可以【】A.提高轮齿的弯曲强度B.提高轮齿的接触强度C.提高轮齿的静强度D.改善运转平稳性29、开式齿轮传动常见的失效形式是【】A.齿面疲劳点蚀B.齿面磨损C.齿面胶合D.齿面塑性变形30、一对渐开线直齿圆柱齿轮正确啮合的条件是【】A.两齿轮的齿厚和齿槽宽分别相等B. 两齿轮的基圆相等C.两齿轮的模数和压力角分别相等D. 两齿轮的模数和齿距分别相等31、斜齿轮的标准模数是【】A.轴面模数B.端面模数C.法面模数D.大端模数32、齿轮正变位后与标准齿轮相比较,变大的是【】A.分度圆B.模数C.压力角D.齿根圆33、下列参数愈小,愈可能引起根切现象的是【】A.分度圆B.模数C.基圆D.齿数34、对需要精确传动比较大的中小功率传动,最好选用【】A.齿轮传动B.凸轮传动C.蜗杆传动D.带传动35、选择蜗轮材料通常根据蜗杆传动的【】A.传递功率B.滑动速度C.传动比D.效率36、在蜗杆传动中,当其它条件相同时,增加蜗杆头数,则传动效率【】A.降低B.提高C.不变D.或提高也可能降低37、蜗杆传动的下列配对材料中,性能较好的是【】A.钢和铸铁B.钢和青铜C.钢和钢D.青铜和青铜38、大尺寸的蜗轮通常采用组合结构,其目的是【】A.提高刚度B.提高传动效率C.增大使用寿命D.节省贵重金属39、两轴距离较大且要求传动比准确,宜采用【】A.带传动B.一对齿轮传动C.轮系传动D.螺纹传动40、在带传动中,若小带轮为主动轮,则带的最大应力发生在带开始【】A.进入从动轮处B.退出主动轮处 C.退出从动轮处 D.进入主动轮处41、普通V带的公称长度为【】A.外周长度B.内周长度C.基准长度D.内、外周平均长度42、带传动正常工作时,不能保证准确传动比是因为【】A.带的弹性滑动 B.带的打滑C.带的磨损 D.带的包角小43、工作条件与型号一定的V带,其寿命随小带轮直径的增大而【】A.增大B.减小C.不变D.不确定44、带传动打滑总是【】A.在大带轮上先开始B.在小带轮上先开始C.在两轮上同时开始D.不确定45、V带传动中,带截面楔角为40°,带轮的轮槽角应【】A.小于40°B.等于40°C.大于40°D.大于45°46、V带传动中,欧拉公式正确的表达式是【】 A.F1=F2 e fα B.F2=F1 e fαC.F1=F2 e fα D. F1=F2 fαe47、在下面机构中能实现间歇运动的是【】A.齿轮机构B.棘轮机构C.蜗杆机构D.平面四杆机构48、在下面机构中能实现间歇运动的是【】A.不完全齿轮机构B.平面四杆机构C.蜗杆机构D.带传动机构49、在机械系统速度波动的一个周期中,【】A.当系统出现盈功时,系统的运转速度将降低,此时飞轮将储存能量B.当系统出现盈功时,系统的运转速度将加快,此时飞轮将释放能量C.当系统出现亏功时,系统的运转速度将加快,此时飞轮将储存能量D.当系统出现亏功时,系统的运转速度将降低,此时飞轮将释放能量50、采用螺纹联接时,若其中一个被联接件厚度很大,且材料较软,在需要经常装拆的情况下宜采用【】A.螺栓联接B.双头螺柱联接C.螺钉联接D.紧定螺钉联接51、对于普通螺栓联接,在拧紧螺母时,螺栓所受的载荷是【】A.拉力B.扭矩C.压力D.拉力和扭拒 52、一调节用双头螺纹,螺距为3mm ,为使螺母沿轴向移动12mm ,螺杆应转 【 】A.1圈B.2圈C.3圈D.4圈 53、用于薄壁零件联接的螺纹,宜采用 【 】A .梯形螺纹B .细牙三角螺纹C .粗牙三角螺纹D .矩形螺纹54、受预紧力和轴向工作拉力的螺栓联接,螺栓承受的总拉力为 【 】 A.F c c c F F 2110'++= B. F c c c F F 2110"++= C. '2110F c c c F F ++= D. F c c c F F 2120'++= 55、被联接件与螺母和螺栓头接触表面处需要加工,这是为了 【 】A .不致损伤螺栓头和螺母B .增大接触面积,不易松脱C .防止产生附加弯曲应力D .便于装配56、螺杆相对于螺母转过一圈时,两者沿轴线方向相对移动的距离是 【 】A.一个螺距B.导程/线数C.螺距×线数D.导程×线数57、螺纹联接防松的根本问题是 【 】 A. 增加螺纹联接的刚度 B. 增加螺纹联接的轴向力C. 增加螺纹联接的横向力D. 防止螺纹副的相对转动58、键联接的主要用途是使轴与轮毂之间 【 】A.沿轴向固定并传递轴向力B.沿轴向可作相对滑动并具由导向性C.沿周向固定并传递扭距D.安装拆卸方便 59、通常确定键的横截面尺寸B ×h 的依据是 【 】A.扭矩B.单向轴向力C.键的材料D.轴的直径 60、阶梯轴应用最广的主要原因是 【 】A.便于零件装拆和固定B.制造工艺性好C.传递载荷大D.疲劳强度高61、直齿圆柱齿轮减速器中的从动轴,传递功率P =6KW ,转速n =60r/min ,轴材料为40Cr钢,调质处理,A=100,轴上开有一个键槽。
《机械原理与机械设计》(上册)课后习题答案
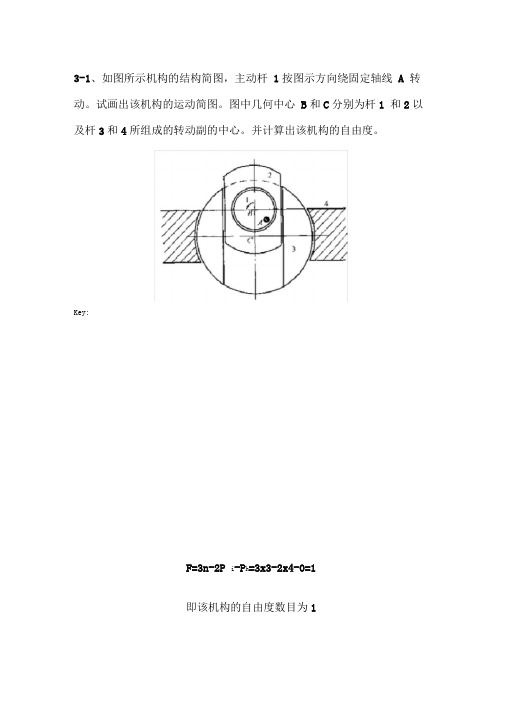
3-1、如图所示机构的结构简图,主动杆1按图示方向绕固定轴线 A 转动。
试画出该机构的运动简图。
图中几何中心B和C分别为杆1 和2以及杆3和4所组成的转动副的中心。
并计算出该机构的自由度。
Key:
F=3n-2P i-P h=3x3-2x4-0=1
即该机构的自由度数目为1
3-2 如图所示为简易冲床机构结构简图,主动杆 1 按图示方向绕固定
轴线A转动;杆1和滑块2组成转动副B ;杆3绕固定轴线C转动, 4 为连杆,杆 5 为冲头,在导路 6 中往复移动。
试绘制该机构的运动示意图并计算机构的自由度。
Key:
F=3n-2P l-p h=3x5-2x7-0=1 4-1
V P24=AP 24X W2=DP24X W 4
故 W4= AP24xW2/DP24=35.316x10/(35.316+41.5)=4.597(rad/s)
Vc=CDxW4=30x4.597=137.91(mm/s)
2) BC上线速度最小的点为 E点,如图所示
W3=Vc/CP13=137.91/(30+24.804)=2.516(rad/s)
V E=P13ExW3=47.718x2.516=120.058(mm/s)
3) Vc=Vd=0,故构件4静止。
V P24=0,因构件2为主动件,构件上静止点只可能为A点,故P24与A点重合。
该情况只可能发生在BC与AB重合的两种情况。
C
〔IJ.G9 :
B n &。
机械原理课后习题答案
inva )
=6.8mm
分度圆半径r=mz/2=10*18/2=90mm
齿槽宽:ea=2π ra/z-sa
分度圆齿厚s=π m/2=15.7mm
=28.1mm
齿顶圆半径ra=r+ha*m=90+10=100mm
基圆半径rb=rcosα=90cos200=84.57mm
inv200=0.0148
齿顶圆压力角
第2章 平面机构的结构分析
2-7:计算自由度,指出所有的复合铰链、局部自由度和虚约束,判定运动 是否确定; 解:自由度:
a) F=3n-2PL-PH=3*3-2*4=1;确定 b) F=3n-2PL-PH=3*6-2*8=2;不确定 c) F=3n-2PL-PH=3*4-2*5-1=1;确定 d) F=3n-2PL-PH=3*4-2*5-1=1;确定
从而lAB+lBC, lBC-lAB可求得,最后确定lAB和lBC; 设计步骤:
①取一点A,并定D点; ②以D为圆心,作圆; 根据CD摆角15°定C1,C2点; ③ 量取lAC1,lAC2
lAB+lBC=430 lBC-lAB=348
C2 15° 15°C1
B A
lAB=41
A
B1
D
lBC=389
B2
虚约束
局部自由度
复合铰链
a)
b)
c)
d)
机械原理 作业
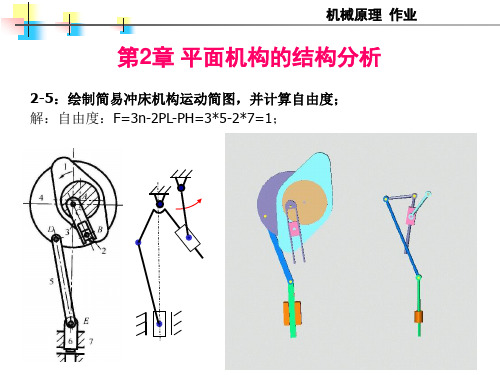
第2章 平面机构的结构分析
2-8:计算自由度;确定机构所含杆组的数目与级别;确定机构级别。画出 瞬时替代机构; 解:自由度:
a) F=3n-2PL-PH=3*7-2*10=1;Ⅱ级 b) F=3n-2PL-PH=3*6-2*8-1=1;Ⅲ级
机械原理与机械设计-上册-范元勋-课后答案
介绍本课程的学习目的、内容及学习 方法,强调理论与实践相结合的重要 性。
机械原理部分 绪论
01
课程学习方法
02
内容
03
重视基本概念的理解:理解机械的基本概念、原理 和特点是学好本课程的基础。
机械原理部分 绪论
掌握分析方法
学会运用机构分析的基本方法,如运 动分析和力分析,是解决实际问题的 关键。
传动
定义
利用两齿轮之间的啮合实现动力的传递。
应用
直齿圆柱齿轮、斜齿圆柱齿轮、锥齿轮等。
特点
效率高,结构紧凑,传动平稳可靠,但制造安装要求高。
04
轴系零部件部分
轴
01
轴的材料与制造
02
轴的材料通常为钢、铸铁或合金钢,也可以根据需要选择其他
材料。
轴的制造方法包括铸造、锻造、切削加工和磨削加工等。
03
加强实践环节
通过实验、课程设计和实习等实践环 节,加深对理论知识的理解,提高实 际操作能力。
机械原理部分 绪论
机构学的重要性
内容
机构学在机械工程中的地位:机构学是机械工程的核心学科之一,为各种机械装置的设计、分析和优化 提供了理论基础。
机械原理部分 绪论
机构学的发展趋势
随着科技的不断进步,机构学在理论和应用方面也在不断创新和发展,如机器 人技术、微型机械等。
传动
定义
利用带与带轮之间的摩擦力实现动力的传递。
应用
V带、平带等。
传动
• 特点:结构简单,成本低,缓冲吸振,过载时打滑可保护其 他零件不受损坏。
传动
定义
利用链条与链轮之间的啮合实现动力的传递。
应用
滚子链、齿形链等。
机械设计课后作业及部分解答
螺纹联接作业1.受轴向载荷的紧螺栓联接,被联接钢板间采用橡胶垫片。
已知预紧力为1500N,当轴向工作载荷为1000N时,求螺栓所受的总拉力及被联接件之间的残余预紧力。
2.图示汽缸螺栓联接,汽缸内压力p在0-1.5MPa间变化,缸盖和缸体均为钢制,为保证气密性要求,试选择螺栓材料,并确定螺栓数目和尺寸。
3.图示两根梁用8个4.6级普通螺栓与两块钢盖板相联接,梁受到的拉力F=28kN,摩擦系数f=0.2,控制预紧力,试确定所需螺栓的直径。
4.图示YLD10凸缘联轴器,允许传递的最大转矩为630N·m,两半联轴器采用4个M12×60的铰制孔螺栓,性能等级为8.8级,联轴器材料为HT200,试校核联接强度。
5.铰制孔用螺栓组联接的三种方案如图所示,已知L=300mm,a=60mm,试求三个方案中,受力最大的螺栓所受的力各为多少?哪个方案较好?6.图示底板螺栓组联接受外力F e作用,外力F e作用在包含x轴并垂直于底板结合面的平面内。
试分析螺栓组受力情况,并判断哪个螺栓受载最大?保证联接安全的必要条件有哪些?7.指出下列图中的错误结构,并画出正确的结构图。
8.图示刚性联轴器取4个M16小六角头铰制孔用螺栓,螺栓材料为45钢,受剪面处螺栓直径为φ17mm,其许用最大扭矩T=1.5kN·m(设为静载荷),试校核其强度。
联轴器材料HT250。
提示9.上题的刚性联轴器中,若采用M16受拉螺栓,靠两半联轴器的接合面间产生的摩擦力来传递扭矩,螺栓材料为45钢,接合面间的摩擦系数f=0.16,安装时不控制欲紧力,试决定螺栓数(螺栓数应为双数)。
10.如图,缸径D=500mm,蒸汽压力p=1.2MPa,螺栓分布圆直径D0=640mm。
为保证气密性要求,螺栓间距不得大于150mm。
试设计此汽缸盖螺栓组联接。
螺纹联接作业解答1~8 (略)解:(1)、求预紧力'F 查手册GB196-81 得113.835d =(M16) p=2H=0.866 p=1.732则:1 1.73213.83513.54666c Hd d =-=-= 查表6.3 取 []4S S =选6.8级:600B a Mp σ=480S a Mp σ=许用拉应力:480[]120[]4sa S Mp S σσ=== 24 1.3'[]c F d σπ⨯≤22[]13.546120'13303.014 1.34 1.3c d F N πσπ⨯⨯∴≤==⨯⨯(2) '2Sf DzF k T μ= 取保 1.3f k =23 1.31500100011.82'13303.010.16155f S k T z F Dμ⨯⨯⨯∴===⨯⨯取 z=12 (双数)解:1、确定螺栓数目z 取间距t =12564016.09125125D z ππ⨯=== 取=162、选螺栓性能等级6.8级 45钢600B a Mp σ= 480S a Mp σ=480S a Mp σ= 3、计算螺栓载荷(1)、气钢盖载荷:225001.2235619.4544D Q p N ππ⨯===(2)、螺栓工作载荷:14726.2216QF N == (3)、残余预紧力: "1.5 1.514726.2222089.33F F N =⨯=(4)、螺栓最大拉力:0"14726.2222089.3336815.55F F F N =+=+=(5)、许用拉力:取安全系数:[]3S S = (不控制预紧力)480[]16033Sa Mp σσ=== 4、计算螺栓尺寸19.5156c d mm ≥==选 M24查 124,20.752,3d d p === 0.866, 2.598H p ==1 2.59820.75220.31919.515666c Hd d =-=-=> (满足要求) 若选M22 122,19.294, 2.5d d p === 则: H=0.866 p=2.1651 2.16519.29418.93366c Hd d =-=-= (不满足) 轴毂联接作业1.图示减速器的低速轴与凸缘联轴器及圆柱齿轮之间分别采用键联接。
机械原理课后习题答案.pdf
[解]
(1)取μι作机构运动简图;
μl
=
0.002
m mm
C3
lBC =
l
2 AB
+
l
2 AC
−
l AB
⋅ lAB
⋅ cos135
= 302 + 1002 − 30 ×100 × cos135 = 123 (mm)
B
D
2
1 ω1
A
ϕ1
4
E
(2)速度分析 取C为重合点:C( C2, C3)
vB → vC 2 → vD ,vE → ω2
p(c3)
ω2
2
D
c2
2) 求aC2
aC 2 = aB
+ aCn 2B
+
at C 2B
=
aC 3
+
aCk
2C 3
+ aCr 2C 3
方向: B→A C→B ⊥CB
0 ⊥CБайду номын сангаас向下 ∥BC e
大小: √ √
?
0√
?
E
d
b
其中:
an C 2B
= ω2 2
lBC
=
2.02
4
C P34
1
A P12
题3-1 试求图示各机构在图示位置时全部瞬心。
b) P13
P34 B
3
P 23 →∞
2
P12
A
4
C P14→∞
P24
1
题3-1 试求图示各机构在图示位置时全部瞬心。
c)
P13 P14 C
4
→∞ P 34
M
vM
机械原理课后全部习题解答
机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理课后习题答案部分)
第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(a)
(b)
(c)
.
.
.
.
.
.
1-6自动倾卸机构
.
3、计算图示平面机构的自由度;机构中的原动件用圆弧箭 头表示。
.
.
中文书2—5颚式破碎机 已知xD=260mm, yD=480mm, xG=400mm, yG=200mm,
lABLCE10m 0,mlBCLBE50m 0,mlCD300mm , lEF40m 0m , lGF685mm , lBCLBE50m 0m
1 45, 13r0a/d s, 逆时针
求:5 , 5
.
解:1)求速度 VB V C VE VF5
VC VB VCB
⊥CD ⊥AB ⊥CB ? ω1lAB ?
.
根据速度影像求V E
VF VE VFE
⊥GF P→e ⊥FE
? Pe v ?
5
fpv
lGF
1.7rads将pf
移至F点知顺时针
2)求加速度 aBaCaEaF5 加速度影像法求 a E
F→G ⊥FG π→e΄ F→E ⊥FE
5
aF t f'"f'a
lFG
lFG
22rasd2
V
2 F
l FG
? e' a
V
2 FE
l FE
?
将f"' f'移至 F知5逆时针
.
2-9
VB1VB2构件 2与构 3在 件 B处形成重合求点 加速度
待求点 B 3 为动点,求 V B 3
VB3 VB2VB3B2
aC naC t aBaC nBaC t B
C→D ⊥CD B→A C→B ⊥CB
BC CE BE b'c' c'e' b'e'
V
2 C
l CD
?
12 lAB
V
2 CB
l CB
.
?
求得e΄
aF naF t aEaF nE aF t E
F→G ⊥FG π→e΄ F→E ⊥FE
5
aF t f'"f'a
ba
ba
' 4.88
K1 18 8 0 04 4..8 88 81.056
.
2—5
解:1)求速度 VB V C VE VF5
VF VE VFE
⊥GF P→e ⊥FE
VC VB VCB
⊥CD ⊥AB ⊥CB ? ω1lAB ?
.
根据速度影像求V E
? Pe v ?
5
fpv
lGF
1.7ra
ds将pf
解:1( )选取 l 0.00米 2 /mm作机构运动简图。
(2)解题步骤VB为: VC2 (VD,VE)及aB aC2 (aD,aE)
(3)求VD,VE,3。 VB lAB1 0.03100.3米/秒 取pb45毫米表V示B,则v 04.530.006米 毫 7/秒 米。
.
由VC2 V BVC2B VC3 VC2C3 求VC3
.
确定 3
3
2
AB, C2B // C2B
pb bc2
c3c2
式中VC3 0
作速度多边形pbc2,然后按速度影象法,作Δbec2∽ΔBEC得 e点,再从e点作ed⊥bc2得d点,则 VE=(pe)μv=26×0.0067=0.1742m/s指向如图。 VD=(pd)μv=34×0.0067=0.2278m/s指向如图
求加速度 a B 3
待求点 B 3 为动点,求 V B 3
VB3 VB2VB3B2
aB3aB2arB3B2
//导路 B→A ⊥导路
//导路 ⊥AB ⊥导路
?
1 lAB
?
VB21lAB 2 00.05 1ms
? 12 lAB ?
a B 2 220 lA B 4 0 0 .0 0 5 2m 0 s2
作加速度多边形:
3
VF3 lFE
.
p3f lFE
20.3,逆
5
VlCCBB1rads,顺
求加速度
根据影像法求 a D、a B
aF1 aF3 aDaDaC aB
aF n3aF t3aF 1aF3F 1aF k3F 1
F→E ⊥FE F→A ∥AF ⊥f1f3
V
2 F1
l FE
? 12 lFA
? 2 V 1 .F3F1
aCaBaC n BaC t BaDaC n DaC t D
B→A C→B ⊥CB π→d’ C→D ⊥CD
12 lAB52 lBC ?
a
d
'
2 4
lCD
?
aCac'9.5ms2
.
lAB=30mm,lAC=100mm,lBD=50mmllDE=40mm,φ1=45º,等角 速度ω1=10rad/s,求E、D的速度和加速度,构件3的角 速度和角加速度.
lFG
lFG
22rasd2
V
2 F
l FG
? e' a
V
2 FE
l FE
?
将f"' f'移至 F知5逆时针
.
中文书:2-9已知曲柄长度l1=0.05m ,角速度ω1=20rad/s,图解法确定 该机构在1=45º时导杆3的速度v3与角速度a3.
解题思路:VB1 VB2 构件2与构件 3在B处形成重合点
方向水平向左
2-10
V B1lA方 B A 向 B
VF1 VF3 VD VC
VCVDVCD VBVCB
VB VC
P→d ⊥CD P→b ⊥CB
VF3 VF1VF3F1
⊥FE ⊥FA ∥AF
pd v ? 1 lAB
?
VCvp c0.4m 5s4 V lC CD D8.7rads,
? 1 lAF ? 根据速度 影像法求 V D
移至F点知顺时针
2)求加速度 aBaCaEaF5 加速度影像法求 a E
aC naC t aBaC nBaC t B
C→D ⊥CD B→A C→B ⊥CB
BC CE BE b'c' c'e' b'e'
V
2 C
l CD
?
12 lAB
V
求得e΄
aF naF t aEaF nE aF t E
取 v作速度 V 多 B3 边 vp形 3b0.72
方向水平向左 .
aB3ab3 ' 1m 4s 方向水平向左
3-3
当滑块 C至左极限和右极限位置时,曲柄与连杆在两共线位置, 曲柄在两位置的极位夹角θ=0,K=1,滑块的压力角在0~αmax 之间变化.
maxarcsbain11.5
.
sin e 0.2 51.447 sin' e 0.16 67' 9.5
//导路 ⊥AB ⊥导路
aB3aB2arB3B2
//导路 B→A ⊥导路
? 12 lAB ?
?
1 lAB
?
a B 2 220 lA B 4 0 0 .0 0 5 2m 0 s2
作加速度多边形:
VB21lAB 2 00.05 1ms 取 v作速度 V 多 B3 边 vp形 3b0 . .72
aB3 a b3' 14ms