基于FPGA的红外图像实时采集系统设计与实现
基于FPGA的实时红外图像采集与预处理系统
d s r y t e d t i i n i a e wh l t r d c s t e i p le n ie i h a e i g f c i e y r s — e t o h e a l n a m g i i e u e h m u s o s n t e s m ma e e e tv l ,a c o s e wi do ba e e h d f r i p e n i g f t me a le l o ih i n w— s d m t o o m l me t n a di n f t r a g rt m n FPGA n r a i e i p o o e s i i e ltm s r p s d i o n c mbi a i n wih t d a t g s o n to t he a v n a e fFPGA n t e a p c s o a a l ls r c u e a d p pei i g Th i h s e t f p r l t u t r n i l n . e n e h g —e e l o ih n a t r e a g s r p a e t hi me h d a d mu h p e i u r c s i g t me i i h lv l g rt m i a g t r n e i e l c d wih t s a t o n c r co sp o e sn i s s v d n t i s s e , e e a e h o o i ss c smo ul rd sg a s mb y l e a d p n - n p r t o a e .I h s y t m s v r l c n l g e u h a d a e in, s e l i n i g po g o e a i n t n
基于FPGA的红外图像实时采集系统设计与实现

基于FPGA的红外图像实时采集系统设计与实现基于FPGA的红外图像实时采集系统设计与实现摘要:随着红外技术的发展,红外图像的实时采集与处理成为了很多领域的研究热点。
本文基于FPGA实现了一个红外图像实时采集系统。
通过对系统的设计与实现,提高了红外图像的采集速度和准确性。
1. 引言红外图像具有热成像、弱光成像等特点,在军事、安防、医疗等领域有着广泛应用。
红外图像实时采集与处理对于实现智能化、自动化具有重要意义。
FPGA作为一种可编程逻辑器件,具有高并行性和低延迟的特点,能够满足红外图像实时采集的需求。
2. 系统设计2.1 红外图像采集模块设计红外图像采集模块负责从红外传感器中采集图像数据。
首先,需要对传感器进行初始化设置,并启动数据传输模式。
然后,利用FPGA的高速IO接口,通过并行或串行方式将数据传输到FPGA中。
采集到的图像数据会经过预处理模块进行去噪和增强操作。
2.2 系统控制模块设计系统控制模块负责对整个系统进行控制和协调。
它接收用户的指令,并根据指令对红外图像采集模块进行操作。
同时,系统控制模块还负责与其他外设的连接和数据传输。
2.3 图像处理模块设计图像处理模块负责对采集到的红外图像进行处理和分析。
首先,需要对图像进行去噪处理,去除噪声干扰。
然后,进行图像增强,以提高图像质量和细节清晰度。
最后,通过算法实现目标检测、跟踪等功能。
3. 系统实现本系统使用Xilinx的FPGA芯片作为硬件平台,开发环境为Vivado。
首先,搭建红外图像采集模块,包括传感器接口电路和数据传输接口电路。
然后,设计系统控制模块,并与红外图像采集模块进行连接。
最后,实现图像处理算法,并将结果显示在屏幕上。
4. 实验结果与分析经过实验测试,本系统能够实时采集红外图像,并进行处理和分析。
通过对图像的增强处理,可以清晰地显示目标物体的热分布情况。
系统具有较高的采样速度和准确性,满足了实时采集红外图像的需求。
5. 总结与展望本文设计与实现了一个基于FPGA的红外图像实时采集系统。
基于FPGA的实时红外图像处理系统

图2 增加像 素前 插值方法如图 4所示 :
图3 增加像素后
匿
翟
图 4插值处理 电路结构 3 . 3中值滤波 图象边界处理与盲点插值相 同。 中值滤波方法如图 5 :
排序输出中间值
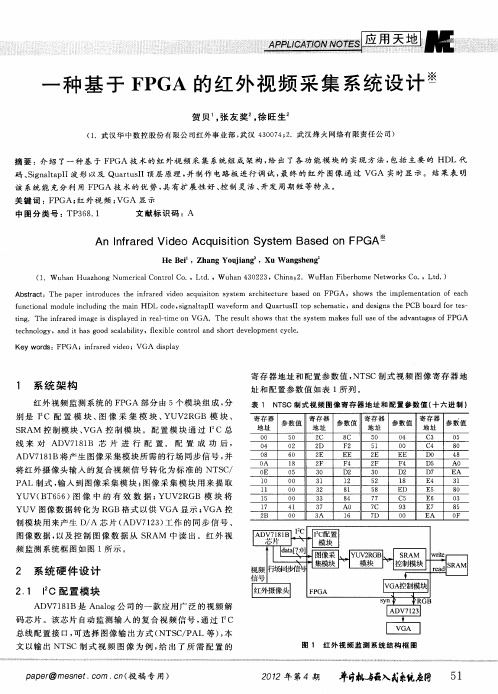
图l 系统硬件结构图 3系统主要算法 . 基于 F G P A的实时红外 图像 处理系统 的算法 主要 有非均 匀校正 、 盲点插值 、 中值滤波和直方图均衡 等组成 。 31 . 非均匀校正 非均匀校正为点操作 , 逐点读 人图象 , 按下式计算各点输出 e ,: o) J
表1
D3 一一 6 l D1 D1 -- 5 D0
R(, 00 )
R(, 01 )
ooo (,)
oo1 (,)
3 . 2盲点插值 若 P o 则是盲点 , 四领域平均值替代 。 =, 用 图象边界采用加 。方法 , 即增加一像 素的 。边界 。如 图 2 图 3 ,
系统硬件结构如图 1所示 , 本系统利用红外探测器采用 Sf dr o ai公 r 司 3 0 5 红外探测器 , 2 2 6 x 采用 A e 公司 的超大规模可 编程逻辑器件 hr a C coeI系列 的 E 2 3 yln I P C 5为核心器件 , 结合美 国 T 公 司的新一代数字 I 处理器 C 0 0系列 T 3 0 6 0 B芯片构成红外 图像处理 系统 ,可满 60 MS 2 C 2 3 足系统体积小 、 功耗低 、 实时高速的要求 。 系统工作原理 :红外探测器接收物体发 出的辐射通量将其转换成 电信号 , 该信号经 过放大滤波预处理后 , 1 由 4位高速 MD转换成数 字 图像信号 , P A采集数字信号并合成图像 。接收 D P的控制 , FG S 产生 系 统控制 信号并完成 图像处理 , 即非 均匀性校正 、 盲点插 值 、 中值滤 波和 直方 图均衡 ,最终再将处理后 的数字 图像通过视频转化 芯片转 化成模 拟信号输 出。
基于FPGA和ARM的红外图像实时显示和采集方法
第4 3卷 第 1 1 期
2 0 1 3年 1 1 月
激 光 与 红 外
LAS ER & I NFRARED
Vo 1 . 4 3, No. 11 No v e mbe r , 2 01 3
文章编号: 1 0 0 1 - 5 0 7 8 ( 2 0 1 3 ) 1 1 — 1 2 2 2 - 0 7
Ab s t r a c t : As t r a d i t i o n a l ARM s y s t e m i s s l o w, i n e ic f i e n t a n d d i ic f u l t t o a c h i e v e c o mp l e t e r e a l — t i me o n i n f r a r e d i ma g e
( 4 0 4 D e p a r t m e n t o f O p t i c — E l e c t r o n i c s C o l l e g e , N a n j i n g U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , N a n j i n g 2 1 0 0 9 4 , C h i n a )
基于FPGA的内河红外图像采集系统设计

I
重庆大学硕士学位论文
英文摘要
ABSTRACT
With the continuous development of river shipping industry, maritime accidents are also likely to increase, the ship collision accidents are more likely to happen particularly in low-visibility conditions. Thus, it is an important problem to take effective measures to prevent ship collision. The core problem to avoid the collision is how to obtain the location information of other ships accurately. Infrared imaging equipment is widely used in image acquisition system for its strong anti-interference, climate adaptability, continuous passive detection day and night and other advantages of. The main task of this subject is to design a FPGA-based infrared image acquisition system of river, through installing the thermal imager in the ship, collecting infrared video data, providing forward looking image information for the operating vessel personnel, at the same time, sending the preprocessed data to follow-up image processing for ship object detection unit, in order to supplement the crew to make decisions and operate correctly, decreasing water accidents, safeguarding lives and properties and finally insure inland navigation safety. This paper first analyzes the current main video image acquisition system. Through the comparison of the core processor chips, the infrared video image acquisition system is designed, which uses FPGA as the core processor. Philips SAA7113H is used to decode the video in the video decoding module, SDRAM is the input and output data buffer, RAM in FPGA is also employed in production-line system for median filtering and the sky-water line detection. The data after the preprocessing is send to the DSP for subsequent image processing. Finally VGA is adopted to display infrared images. This paper studies the hardware implementation of image acquisition system and function realization on FPGA. At the same time, analyzes the characteristics of infrared images, and chooses median filtering for image enhancement, and programming for fast median filtering algorithm. Ships in the Inland-water infrared image always near the sky-water line. In this paper, through a comparative analysis of sky-water line detection algorithm, a sky-water line detection algorithm based on linear fitting is proposed. Detecting the sky-water line and getting the region of Interest(ROI), not only improve the follow-up processing speed, but also avoid most of the background interference, improve accuracy of target detection algorithms. Key word: FPGA, Infrared Image Acquisition, Median Filtering, Sky-water Line
一种基于FPGA的红外视频采集系统设计
f n t n l d l n l d n h i u ci a mo u e i cu i g t e man HDL c d , i n l p 1wa e o m n a t sIt p s h ma i ,a d d s n h CB b a d f rt s o o e s at I g a v f r a d Qu r u I o c e t c n e i st e P o r o e — g
线 来 对 ADV7 8 B 芯 片 进 行 配 置 。 配 置 成 功 后 , 11
址 和 配 置 参 数值 如 表 1所 列 。
表 1 N S T C制 式 视 频 图像 寄 存 器 地 址 和 配 置 参数 值 ( 六进 制 ) 十
寄存 器 参 数值 寄 存 器 参 数 值 寄 存 器 参 数 值 寄 存 器 参 数 值
码 、i a a I 波 形 以及 Q atsI 层 原 理 , 制 作 电路 板 进 行 调 试 , 终 的 红 外 图像 通 过 VG 实 时 显 示 。结 果 表 明 S n l pI g t u r I顶 u 并 最 A
该 系统 能 充 分 利 用 F GA 技 术 的优 势 , 有 扩 展 性 好 、 制 灵 活 、 P 具 控 开发 周 期 短 等 特 点 。 关 键 词 :F GA; 外 视 频 ; P 红 VGA 显 示
( . W u a u z o g Nu rc lC n r l . 1 h n H a h n me ia o t o Co ,Lt . d ,W u a 3 2 3,Chn ; .W u n Fi e h me Ne wo k . h n40 2 ia 2 Ha b r o t r sCo ,L d ) t .
基于FPGA的多通道红外图像实时采集系统

a ra-i l —h n l if e ma e a q i t n ( e lt me mut c a es nr d i g c usi i n a r io RMO I A)s s m ae n F GA wa rp sd y t b sd o P s po o e . e
Absr c :Co p r d wih t e ta i o a m a i g s se wi i t d d t ae a d o l n aa c a n l ta t m a e t h r d t n li g n y t m t lmie aa r t n n y o e d t h n e , i h
从 而 为进 一 步的 多波段 红外 图像 处理和 图像 融合 算 法提 供 实时的、 同时 的多通道 数据 流 。 首先 详 细描
述 R I 的 系统结 构和 F G 内算 法功 能模 块 ,然后 对 多通道 数 据采 集 所 面临的 新 问题 提 出设 计 MC I A PA 的解 决方案 , 最后 由实验测 定 系统的传 输速 率 , 并且 与传 统 的图像采 集 系统进行 对 比。 总之 , MC I R I A 实现 了一个 统一 的 多通道红 外 图像 的实 时采集 系统 。 关键词 :多通道 红 外 图像 采 集 系统 ; 实 时图像 采集 ; P I x rs 总线 ; 可重构 系统 ; C E pes
循 环 优 先 级 V 仲 裁 C
中 图 分 类 号 :T 1 T 3 6 N2 6; P 3 文 献 标 志 码 :A 文 章 编 号 :1 0 — 2 6 2 1 ) 5 3 3 0 0 7 2 7 ( 0 2 0 —1 6 - 6
Re l tm e m u t- h n e s i f a e m a e a -i lic a n l n r r d i g ・
基于FPGA的红外图像实时采集系统设计与实现
1引 言
世界卫生组织 2004 年的相关数据显示,全世界每天 有 3000 多人死于道路交通伤害,在报告中列举的十大 “影响交通事故发生的危险因素”中,疲劳驾驶高居第三
位。在美 国,每 年 由 驾 驶 疲 劳 引 发 的 交 通 事 故 多 达 100 000起,导致 40 000 人受伤,1 550 人丧命[1]。在各种 肇事行为中,疲劳驾驶是一种肇事死亡率高于肇事率的 恶性交通事件,提前预知并防止此类事故发生具有重大 的实际意义。
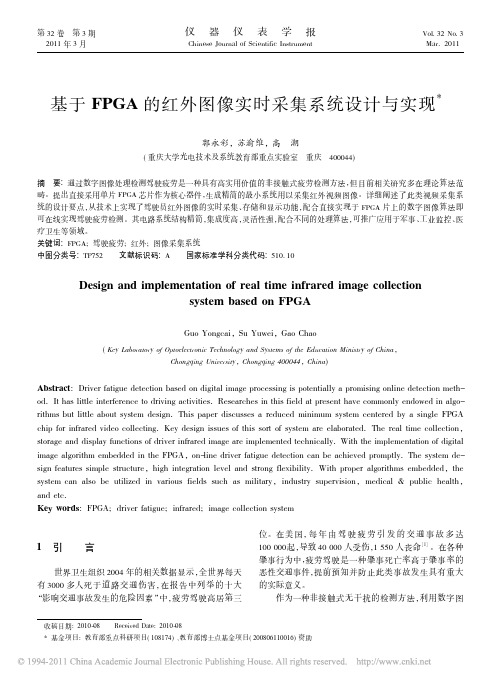
如图 1,通过实现于 FPGA 的 IIC 总线对视频解码芯 片进行配置后,芯片对来自摄像头的 PAL 视频流进行转 换输出。模拟图像信号被转换后以 ITU-R BT. 656 标准 格式输出[12],该标准的帧间时序规定如图 2 所示,通过
HS,VS 和 F 三个同步信号描述了该格式中视频帧的起 始和结束点以及奇偶场信息。其帧内时序规定如图 3 所 示,在一个数据行之内,使用 EAV 和 SAV 信号作为行数 据起始和结束的标志。实际中,上述所有信号均隐藏于 数据总线中,使用 EAV 和 SAV 信号中的 XY 作为标志, 以普通图像数据的形式发送,通过时序检测方可将其检 出。该标准规定对制式为 PAL 的输入信号,输出信号按 奇偶场排序共 625 行,其中有效数据 576 行,奇场在前, 偶场在后。每行 1 728 时钟,其中像素时钟 1 440( 720 × 2) ,按 YCrCb 4: 2: 2 方式进行子采样,另外 288 时钟则给 出时序信号。由于红外图像不包含色彩信息,在数据捕 获时,CrCb 数据被忽略而只对 Y 进行采集。在实现时, 考虑疲劳检测算法对图像尺寸的实际要求和对 FPGA 芯 片资源的节约,并未对摄像头生成的分辨率为 720 × 576 的整幅图象进行全采样,而是有选择地对 CCD 成像中心 附近的 320 × 240 像素区域进行采集。由此降低了对硬 件资源的要求,且 不 失 系 统 的 有 效 性 和 通 用 性,该 分 辨 率下的图像仍包含大量信息,而 320 × 240 分辨率也被图 像显示设备所广泛支持,市场化程度高,易于系统集成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于FPGA的红外图像实时采集系统设计与实现
基于FPGA的红外图像实时采集系统设计与实现
摘要:随着红外图像在军事、航天、安防等领域的广泛应用,对红外图像的实时采集和处理需求越来越高。
本文基于FPGA设计并实现了一个红外图像实时采集系统,通过系统硬
件框架、图像采集流程设计以及软硬件协同优化等方面的研究,实现了高效、稳定的红外图像实时采集和传输,为相关领域的研究和应用提供了重要支持。
一、引言
红外图像技术是一种利用物体发射的红外辐射进行成像分析的技术,具有透过黑暗、烟雾等不利环境的能力。
它在军事、航天、安防等领域具有重要应用价值。
红外图像的实时采集和处理对于这些领域的研究和应用至关重要,然而传统的红外图像采集系统存在采集速度慢、波动大、传输距离限制等问题。
因此,设计并实现一种基于FPGA的红外图像实时采集系统具有
重要意义。
二、系统框架设计
基于FPGA的红外图像实时采集系统主要由硬件和软件两个部
分组成。
硬件部分包括红外探测器、FPGA开发板、存储器、
图像传输模块等;软件部分主要包括图像采集控制程序和数据处理程序。
硬件框架设计采用分层结构,分为红外图像采集层、控制层、存储层和传输层四个部分。
红外图像采集层包括红外探测器和模拟-数字转换电路,负责将红外辐射信号转换为数字信号。
控制层包括FPGA芯片和时钟控制电路,负责采集信号的
控制和同步。
存储层包括高速存储器和图像缓存,负责暂存采
集到的红外图像数据。
传输层包括数据传输电路和网络接口,负责将采集到的图像数据传输到外部设备。
三、图像采集流程设计
图像采集流程是指将红外图像转换为数字信号并存储的过程。
在红外图像采集层,红外探测器将红外辐射信号转换为模拟信号,经过模拟-数字转换电路转换成数字信号。
在控制层,FPGA芯片控制采集信号的采样频率和位宽,通过时钟控制电路实现同步。
在存储层,高速存储器负责将采集到的图像数据暂存起来,图像缓存则将暂存的图像数据进行处理和压缩。
在传输层,数据传输电路将处理和压缩后的图像数据传输到外部设备。
四、软硬件协同优化
为了提高系统的性能和稳定性,本文进行了软硬件协同优化。
在硬件方面,使用了高速存储器和FPGA芯片,提高了系统的采集速度和数据处理能力。
在软件方面,通过优化图像采集流程,减少了数据传输时间,提高了系统的实时性和稳定性。
五、系统实现与测试
基于FPGA的红外图像实时采集系统经过硬件搭建和软件编程实现后,进行了系统测试。
测试结果表明,系统能够实时采集红外图像并将数据传输到外部设备,采集速度和稳定性满足实际需求。
六、总结与展望
本文基于FPGA设计并实现了一个红外图像实时采集系统,通过优化系统的硬件框架、图像采集流程和软硬件协同等方面,实现了高效、稳定的红外图像实时采集和传输。
未来,可以进一步优化系统的算法和接口设计,提高系统的采集速度和数据处理能力,为红外图像在各个领域的应用提供更多可能性
七、系统的局限性和改进方向
尽管本文设计并实现了一个高效和稳定的红外图像实时采集系统,但仍存在一些局限性。
首先,系统的采集速度和数据处理能力仍有提升空间。
尽管使用了高速存储器和FPGA芯片,但随着红外图像采集和处理的复杂度增加,系统可能无法满足更高需求。
因此,可以进一步优化系统的算法和接口设计,提高系统的采集速度和数据处理能力。
其次,系统的实时性和稳定性仍需改进。
尽管已经通过优化图像采集流程减少了数据传输时间,但仍可能存在图像数据传输延迟和丢失的问题。
因此,可以引入更高效的传输协议和数据压缩算法,提高系统的实时性和稳定性。
此外,在存储层,尽管采用了高速存储器来暂存采集到的图像数据,但由于存储容量有限,可能无法满足长时间的图像采集需求。
因此,可以考虑增加存储容量或使用外部存储设备,以满足更长时间的数据存储需求。
最后,系统的成本也是一个需要考虑的因素。
尽管FPGA
芯片和高速存储器提供了较高的性能,但它们的成本也相对较高。
为了降低系统的成本,可以考虑使用更便宜的硬件组件或寻找更经济的解决方案。
综上所述,本文所设计和实现的红外图像实时采集系统在性能和稳定性方面已经取得了一定的成果,但仍有一些局限性。
通过进一步优化系统的算法和接口设计,提高系统的采集速度和数据处理能力,改进系统的实时性和稳定性,增加存储容量,并降低系统的成本,可以进一步完善该系统,并为红外图像在各个领域的应用提供更多的可能性
经过对红外图像实时采集系统的设计和实现,我们发现系统在性能和稳定性方面已经取得了一定的成果。
然而,还存在一些局限性需要进一步改进。
首先,我们可以进一步优化系统的算法和接口设计,以提高系统的采集速度和数据处理能力。
目前系统的图像采集速度还有待提高,可以通过改进图像传感器的性能或增加采集通道的数量来加快采集速度。
此外,我们可以优化图像处理算法,减少图像处理的时间和计算量,提高数据处理效率。
其次,系统的实时性和稳定性仍需改进。
尽管已经通过优化图像采集流程减少了数据传输时间,但仍可能存在图像数据传输延迟和丢失的问题。
为了解决这些问题,可以引入更高效的传输协议和数据压缩算法,以减少数据传输延迟和提高数据传输的稳定性。
此外,在存储层,尽管采用了高速存储器来暂存采集到的图像数据,但由于存储容量有限,可能无法满足长时间的图像采集需求。
为了解决这个问题,可以考虑增加存储容量或使用外部存储设备,以满足更长时间的数据存储需求。
最后,系统的成本也是一个需要考虑的因素。
目前系统采用的FPGA芯片和高速存储器虽然提供了较高的性能,但它们
的成本也相对较高。
为了降低系统的成本,我们可以考虑使用更便宜的硬件组件或寻找更经济的解决方案。
综上所述,通过进一步优化系统的算法和接口设计,提高系统的采集速度和数据处理能力,改进系统的实时性和稳定性,增加存储容量,并降低系统的成本,可以进一步完善该红外图像实时采集系统,并为红外图像在各个领域的应用提供更多的可能性。
我们相信,通过不断的改进和完善,该系统将能够更
好地满足红外图像采集和处理的需求,为相关领域的研究和应用提供更可靠和高效的技术支持。