UG运动仿真分析(精品课件)
UG运动分析教程(中文版)运动仿真

www.j ix ie cu n.co m运动仿真本章主要内容:z 运动仿真的工作界面 z 运动模型管理 z 连杆特性和运动副 z 机构载荷 z运动分析9.1 运动仿真的工作界面本章主要介绍UG/CAE 模块中运动仿真的功能。
运动仿真是UG/CAE (Computer Aided Engineering )模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG/Modeling 的功能建立一个三维实体模型,利用UG/Motion 的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion 的功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为: 1.建立一个运动分析场景;2.进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;3.进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制;4.运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
9.1.1 打开运动仿真主界面在进行运动仿真之前,先要打开UG/Motion (运动仿真)的主界面。
在UG 的主界面中选择菜单命令【Application 】→【Motion 】,如图9-1所示。
www.j ix ie cu n.com图9-1 打开UG/Motion 操作界面选择该菜单命令后,系统将会自动打开UG/Motion 的主界面,同时弹出运动仿真的工具栏。
9.1.2 运动仿真工作界面介绍点击Application/Motion 后UG 界面将作一定的变化,系统将会自动的打开UG/Motion 的主界面。
UG运动仿真分析(精品课件)

连杆
运动副
8
1. 连杆
连杆几何体
连杆几何体用于将屏称。
❖ 对机构作运动分析,
名
不必赋予质量和惯性矩等参数。
称
9
2. 运动副
运动副的作用:允许所需的运动和限制不要的运 动。
UG提供了12种运动副共分两大类:普通运动副 8种,它是独特的,于自身有关;特殊运动副4种, 是在两个普通类型的运动副之间定义了特殊关系的 运动副,允许两个不同类型的运动副一起工作完成 特定的功能。
5
Scenario 导航器 6
3. 机构分析的一般步骤
❖ 打开主模型文件。 ❖ 进入运动分析模块,创建一个Scenario模型
并设置机构分析环境。 ❖ 创建各机构对象(构件、运动副、标记等)。 ❖ 指定分析结果类型,对机构进行求解分析。 ❖ 输出分析结果。
7
创建运动分析对象
在运动分析中,连杆和运动副是组成 构件的最基本要素,两者都具备是机构 运动的必要条件。
❖ 固定副 在连杆间创建一个固定连接副,相当于以刚性连接两连杆,连杆间无相 对运动。
13
特殊运动副:
❖ 齿轮齿条副:滑动副和旋转副的结合 ❖ 齿轮副:两个转动副的结合 ❖ 线缆副:两个滑动副的结合 ❖ 点线接触副:4个自由度 ❖ 线线接触副: 4个自由度 ❖ 点面副:5个自由度
14
模型准备与运动分析
18
3. 封装 用来收集特定的、用户感 兴趣的对象信息的一组工具。 有三个功能: ➢ 测量 ➢ 跟踪 ➢ 干涉
19
❖ 测量
测量机构中目标对象的距离或角度,并建立安全区 域。
❖ 跟踪
用来生成每一分析步骤处目标对象的一个复制对象。
❖ 干涉
主要比较在机构运动过程中是否发生重叠现象。
UG运动机构仿真分析经典收藏

二维对象(例如曲线等)和三维对象(例如实体对象等)均可包括在连杆中。
连杆
14
连杆的创建
1. 单击“插入”→“链接“
2. 在运动工具条中单击
按钮
3. 在连杆及运动副工具条上单击
齿轮副
齿轮副模拟一对齿轮,选择现有的两个旋转副创建齿轮副,并定义齿轮的传动比。齿轮副不能添加驱 动和极限。齿轮的啮合点即为齿轮副的原点,比率参数即为齿轮传动比。
小节目录 | 章目录
31
运动副的施加
齿轮和齿条副
齿轮和齿条副模拟齿轮和齿条之间的运动,选择现有旋转副和滑动副创建齿轮和齿条副。其自由度为5, 不能添加驱动和运动极限。原点是齿轮与齿条牙齿的接触点,Z轴平行于齿条的滑动方向。
小节目录 | 章目录
19
运动副的施加
固定副
固定副是为了阻止连杆的运动,单个具有固定副的连杆自由度为零,两个连杆之间的固定副使两个连杆 之间没有运动。
小节目录 | 章目录
20
运动副的施加
滑动副
滑动副连接两个连杆,有一个移动自由度,连杆之间不允许有转动。滑动副可以添加驱动,可以规定运 动极限。
小节目录 | 章目录
35
运动机构仿真
生成动画
NX 运动仿真模块允许用户创建动画文件,并且可以用第三方软件播放。可以用的格式有: mpeg、动画GIF、VRML。
生成动画文件需要下面两个步骤: 1.做完机构仿真,检验机构的正确性并且生成结果文件(.res)。
2.将光标放在导航器节点上,右击选择需要的动画格式。
第 UG编程 程序仿真模拟PPT课件
• 1.播放 • 2.自定义速度播放 • 3.步进播放 • 4.前进到下一个操作 • 5.过切检查
第2页/共12页
13.2.2 3D动态
• 3D动态是模拟刀具对毛坯的切削运动的过程,并可以形成IPW残料。不再是单纯的刀具运动。因此3D动态 方便观察与分析、模拟仿真显得更真实。在3D动态模拟对话框当中,用户可以根据需要设置参数,比如: 刀具的显示、IPW的精度等。使3D动态模拟内容更丰富,满足不同情况下的需要。
第11页/共12页
感谢您的观看!
第12页/共12页
ቤተ መጻሕፍቲ ባይዱ
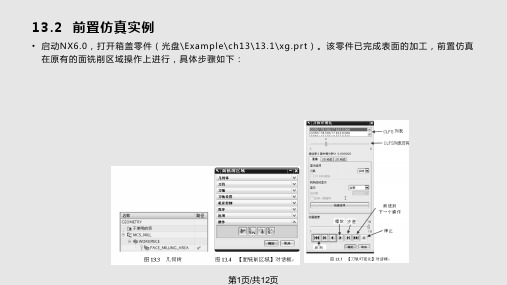
13.2 前置仿真实例
• 启动NX6.0,打开箱盖零件(光盘\Example\ch13\13.1\xg.prt)。该零件已完成表面的加工,前置仿真 在原有的面铣削区域操作上进行,具体步骤如下:
第1页/共12页
13.2.1 重播
• 重播刀具轨迹是在轨迹已经生成的前提下进行重播刀具轨迹。它还可以利用分析工具可以对轨迹与边界之 间的距离进行分析,如图13.6所示。
第9页/共12页
13.3.5 碰撞检测
• 碰撞检测的功能是:在仿真的过程中如果出现刀具碰撞零件、夹具,系统将会出现警告信息或中断仿真以 提示用户。碰撞检测信息栏,如图13.63所示。
第10页/共12页
13.3 练习题
• 1. 程序仿真模拟的意义? • 2. 2D动态和3D动态相比较的区别? • 3. 简述数控铣机床仿真的步骤?
• 2D动态仿真模拟主要的功能含义如下: • 1.显示与比较 • 2.过剩 • 3.通过颜色表示厚度 • 4.IPW碰撞检查 • 5.抑制动画
UG运动仿真分析精品课件(二)
UG运动仿真分析精品课件(二)- UG运动仿真分析是什么?UG运动仿真分析是一种基于UG软件平台的仿真技术,它可以帮助工程师模拟和分析机械系统的运动行为,包括运动学、动力学、应力分析等多个方面。
- UG运动仿真分析的优势有哪些?UG运动仿真分析具有以下优势:1. 可以提高机械系统的设计效率和优化程度,减少设计错误和试验成本。
2. 可以帮助工程师更好地理解机械系统的运动行为和性能特征,从而更好地进行设计和改进。
3. 可以提供多种仿真分析功能,如运动学仿真、动力学仿真、应力分析等,满足不同需求。
4. 可以与其他软件平台进行集成,实现全面的工程设计和分析。
- UG运动仿真分析精品课件的特点是什么?UG运动仿真分析精品课件具有以下特点:1. 课件内容全面,包括UG软件的基本操作和运动仿真分析的基本知识。
2. 课件配有大量的实例和案例,帮助学生更好地理解和掌握相关知识。
3. 课件形式多样,包括文字、图像、视频等多种形式,满足不同学习需求。
4. 课件设计合理,注重知识点的层次和逻辑性,易于学生理解。
- 如何利用UG运动仿真分析精品课件进行学习和实践?利用UG运动仿真分析精品课件进行学习和实践,可以采取以下步骤:1. 首先,学生应该了解UG软件的基本操作,掌握绘图、建模、装配等基本技能。
2. 其次,学生可以学习运动仿真分析的基本知识,包括运动学、动力学、应力分析等多个方面。
3. 然后,学生可以根据课件提供的实例和案例进行实践操作,深入理解相关知识。
4. 最后,学生可以结合实际工程案例,应用所学知识进行仿真分析,提高工程设计和分析水平。
- UG运动仿真分析精品课件的应用范围是什么?UG运动仿真分析精品课件的应用范围非常广泛,主要包括以下方面:1. 机械工程领域:可以应用于机械系统的设计、分析和优化,如汽车、机床、航空航天等领域。
2. 电子工程领域:可以应用于电子设备的设计、分析和优化,如手机、平板电脑、电视机等领域。
UG运动仿真- 运动分析

运动分析对原来的三维实体模型完成了连杆特性的设置,运动副的建立和外载荷的添加的前置处理后,就完成了运动模型的构建。
此时可以利用UG/Motion运动分析工具栏,对创建的运动模型进行运动仿真,如图9-65所示。
图9-65 运动分析工具栏UG/Motion模块嵌入了Mechanical Dynamics公司(MDI)的求解器ADAMS/Kinematics,在建立运动模型的同时UG/Motion已经为该求解器建立了初始数据或输入文件,只有运行UG/Motion的运动分析模块既可自动的将初始数据和输入文件输入到求解器中,从而得出运动模型运动后的各种数据,完成运动模型合理性的检查。
9.5.1 运动仿真过程的实现UG/Motion的运动分析模块可以设置运动分析的类型,并通过对运动分析过程的控制,可以直观的以动画的形式输出运动模型不同的运动状况,便于用户比较准确了解所设计的运动机构实现的运动形式。
1.设置运动仿真的参数1)运动分析类型的设定UG/Motion的运动分析类型有两类:静态分析和动力学分析。
点击功能菜单区运动分析模块中的运动(Animation)按钮,将弹出一个【运动分析选项】(Analysis Options)对话框,该对话框的第一个选择区域就要求用户选择运动分析的类型,各选项的功能如图9-66所示。
图9-66 【运动分析选项】对话框2)运动控制参数的设定在上述的运动分析选项(Analysis Options)对话框中,第二个区域即要求用户输入运动控制参数:运动时间和运动步骤。
整个运动模型运动的快慢就是由这两个参数决定的。
2.运动仿真过程的动画输出及控制1)运动仿真过程的控制设置完了运动分析的参数后,若选择的运动分析类型为静态分析点击OK键,将弹出一个【静态平衡】(Static Equilibrium)对话框,如图9-67所示。
图9-67 【静态平衡】对话框若选择的运动分析类型为动力学分析点击OK键,将弹出一个【运动过程】(Animation)对话框,对话框各选项的功能如图9-68所示。
UG运动仿真分析精品课件(一)
UG运动仿真分析精品课件(一)
近年来,随着计算机科技的快速发展,计算机辅助工程技术在工程领域得到了广泛的应用。
其中,UG运动仿真分析是一种重要的计算机辅助工程技术,它可以模拟现实中的运动和力学行为,为工程师提供重要的设计和优化方案。
而UG运动仿真分析精品课件则是一种快速有效的学习工具,可以帮助工程师掌握这一技术。
UG运动仿真分析精品课件主要包括以下几个部分:
1. UG基础知识介绍。
这一部分主要介绍UG软件的基本结构和功能,并详细介绍UG中的运动仿真分析功能。
2. 运动仿真分析的建模过程。
这一部分主要介绍UG中运动仿真分析的建模流程,包括建立装配体、建模运动和约束关系等。
3. 运动仿真分析的参数设置。
这一部分主要介绍如何设置运动仿真分析的各种参数,包括动力学模拟参数、接触参数、碰撞参数等。
4. 运动仿真分析的结果分析。
这一部分主要介绍如何分析运动仿真分析的结果,包括动画模拟、运动状态曲线、接触压力曲线等。
5. 实例分析。
这一部分主要通过实例分析的方式,展示如何运用UG 运动仿真分析解决实际工程问题。
通过UG运动仿真分析精品课件的学习,工程师可以掌握运动仿真分析的基本知识和技能,并能够在实际工程中应用运动仿真分析技术,优化设计方案、提高产品质量、降低生产成本。
总之,UG运动仿真分析精品课件是一种非常有价值的学习工具,它可
以帮助工程师快速掌握运动仿真分析技术,提高工作效率和工作质量,因此被广泛应用于工程领域。
案例3 基于UG的机械动力学分析-运动仿真

2018/1/8
§5
运动分析
对原来的三维实体模型完成了连杆特性的设置,运动副
的建立和外载荷的添加的前置处理后,就完成了运动模 型的构建。此时可以利用UG/Motion运动分析工具栏,对 创建的运动模型进行运动仿真
2018/1/8
UG/Motion的运动分析类型有两类:静态分析和动力学分析 整个运动模型运动快慢就是由运动时间和运动步骤这两个参数决定
2.Selection Steps
该选项给用户提供了建立一个运动副的操作步骤。共包含四个步骤,其中可根 据用户的要求省去几项,通过完成各个步骤,可以引导用户完成运动副参数 的设置。(①第一个连杆 ;②运动副在第一个连杆上的位置和方向;③第二 个连杆 ;④运动副在第二个连杆上的位置和方向) 3.运动副的驱动力
2018/1/8
8.2.3
运动副
在UG/Motion中给用户提供了多种类型 运动副
2018/1/8
创建运动副
1.选择运动付要约束的第一个连杆(action link),并推断 其原点和方位。
2.选择运动付要约束的第二个连杆(base link),并推断 其原点和方位。 3.没有装配好的连杆之间可以“咬合”
2018/1/8
1)旋转副 (Revolute)
可以实现两个相连件绕同一轴作相对的转动
2)滑动副(Slider)
滑块连接是两个相连件互相接触并保持着相对的滑动
3)圆柱副(Cylindrical)
实现了一个部件绕另一个部件(或机架)的相对转动
4)螺纹副(Screw)
实现了一个部件绕另一个部件(/8
对运动过程控制 的功能主要是由 运动控制选项来 实现的
2018/1/8
运动仿真动画文件输出:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖
10、低头要有勇气,抬头要有低气。08:49:1508:49:1508:4910/4/2020 8:49:15 AM
连杆
运动副
1. 连杆
连杆几何体
连杆几何体用于将屏幕 中的几何体定义为连杆, 同时系统对该杆赋予一个 默认的名称。
❖ 对机构作运动分析,
名
不必赋予质量和惯性矩等参数。
称
2. 运动副
运动副的作用:允许所需的运动和限制不要的运 动。
UG提供了12种运动副共分两大类:普通运动副 8种,它是独特的,于自身有关;特殊运动副4种, 是在两个普通类型的运动副之间定义了特殊关系的 运动副,允许两个不同类型的运动副一起工作完成 特定的功能。
❖ 运动副
以一定的方式把各个构件彼此非刚性(可动)联接, 构件间能产生某些相对运动。
❖ 自由度和约束
任意两个没有构成运动副的构件,两者之间有6个 自由度(在坐标系中3个运动和3个转动)。若将两 者以某种方式联接而构成运动副,则两者的相对运 动便受到一定的约束。
2. Scenario 模型
选择[应用]-[运动]命令,进入运动分析模块。单击 右侧“Scenario 导航器”,弹出下图。
[编辑]-[运动对象]:或点击
2. 标记和智能点
在分析解算前通过在机构模型中设置标记或智 能点,可得到关心点的运动位移、速度等分析结 果。
❖ 标记
比智能点功能强大,创建时与连杆始终相关,且 须定义方向。系统默认名称AS001。
❖ 智能点
没有方向的点,不与连杆相关联,系统默认名称 Me001。
3. 封装 用来收集特定的、用户感 兴趣的对象信息的一组工具。 有三个功能: ➢ 测量 ➢ 跟踪 ➢ 干涉
Scenario For Motion 自动复制主模型的装配文 件,并建立一系列不同的运动分析方案。分析结果 可以指导修改零件的结构设计或者调整零件的材料。 一旦确定优化的设计方案,设计更改可直接反映到 装配的主模型中。
运动分析基本知识
1. 基本概念 ❖ 构件
机器中每一个独立的运动单元,运动单元可以是单 个零件或多个刚性联接在一起。
❖ 测量
测量机构中目标对象的距离或角度,并建立安全区 域。
❖ 跟踪
用来生成每一分析步骤处目标对象的一个复制对象。
❖ 干涉
主要比较在机构运动过程中是否发生重叠现象。
动作:当机构发生干涉时,可以产生高亮显示和创
建实体两种动作。
4. 运动分析
运动分析可以多种方式输出机构分析结果。如基于时间 的动态仿真、基于位移的动态仿真、输出动态仿真的图像文 件、分析结果的数据文件、线图及电子表格等。
❖ 动画
是基于时间的动态仿真。
存储过分析文件
仿真分析的时间段
时间段内机构运动的瞬 态位置数
设计位置 装配位置
以时间为单位 播放
以步数为单位 播放
❖ 球铰
关节运动仿真,通过控制一个或多个原动运动副的位移步 长来进行机构动态仿真。位移为步长大小和步数的乘积。
❖ 生成图表
动画或关节仿真后,可通过图表方式输出机构的分析结果。
Scenario 导航器
3. 机构分析的一般步骤
❖ 打开主模型文件。 ❖ 进入运动分析模块,创建一个Scenario模型
并设置机构分析环境。 ❖ 创建各机构对象(构件、运动副、标记等)。 ❖ 指定分析结果类型,对机构进行求解分析。 ❖ 输出分析结果。
创建运动分析对象
在运动分析中,连杆和运动副是组成 构件的最基本要素,两者都具备是机构 运动的必要条件。
动。
❖ 滑动副 用来连接两个连杆,有一个自由度,连杆之间不许有转动。 可以实现一个部件相对于另一部件的直线运动。
❖ 圆柱副 用来连接两个连杆,有两个自由度,一个移动自由度和一个转动自由度。
❖ 螺旋副 圆柱副和滑动副的结合。
❖ 万向节 连接两个成一定角度的转动连杆,有两个自由度。
❖ 球形副 用来连接两个连杆,有三个自由度。
❖ 平面副 用来创建两个连杆的平面相对运动,有三个自由度:2个移动自由度和1 个旋转自由度。
❖ 固定副 在连杆间创建一个固定连接副,相当于以刚性连接两连杆,连杆间无相 对运动。
特殊运动副:
❖ 齿轮齿条副:滑动副和旋转副的结合 ❖ 齿轮副:两个转动副的结合 ❖ 线缆副:两个滑动副的结合 ❖ 点线接触副:4个自由度 ❖ 线线接触副: 4个自由度 ❖ 点面副:5个自由度
Y-轴:可通过下拉菜单设置Y轴参数。 值:‘幅值’和‘角度幅值’表示参数是各分量的合成量,
T1,T2,T3和输入角度1、2、3分别表示所选参数的沿坐 标轴的三个水平分量或转动分量。
❖ 运行电子表格
动画或关节仿真后,可通过运行电子表格中的数据 来驱动机构,进行仿真分析。
❖
9、 人的价值,在招收诱惑的一瞬间被决定 。20.10.420.10.4Sunday, October 04, 2020
普通运动副
❖ 旋转副
连接两个连杆的经典运 动副,有 一个绕Z轴旋 转的自由度,不允 许两个连杆之间有任何的移动。
运动形式:
➢ 两个连杆绕同一轴作相对的转动 ➢ 一个连杆绕固定在机架上的一根轴
旋转。
捕捉连杆:
பைடு நூலகம்用于限定用户设置的运动副为连个连杆之间的连接。
限制:
控制转动副的相对转动范围。
运动驱动:
➢ 恒定:给运动副添加一个不变的原始驱动力,旋转或线形位移。 ➢ 谐波:给运动副添加一个谐振变化的原始驱动力,如光滑的正弦运动。 ➢ 一般:由用户通过函数编辑器自定义一个表达式,定义运动副的运动。 ➢ 球铰:用于设置基于位移的动态仿真,可设定转动副具有独立时间的运
运动仿真分析
1 运动分析基本知识 2 创建运动分析对象 3 模型准备与运动分析 4 运动分析实例
UG的运动分析模块(Scenario For Motion)是 CAE应用软件,能够对二维和三维机构进行复杂的 运动分析和动力学分析。可以进行机构的干涉分析、 跟踪零件的运动轨迹、分析机构中零件的速度、加 速度、作用力和力矩等。
模型准备与运动分析
创建运动对象后,可以在模型准备中对模 型进行重新编辑和其他操作。包括对模型尺 寸的编辑、运动对象的编辑、标记点和智能 点的创建、封装等操作。
模型准备与运动分析
模型准备
主模型尺寸
封装 智能点 编辑运动对象
动画 球铰 生成图表 生成电子表格
1. 编辑运动对象
可以对已创建的连杆、运动副、标记和约 束进行编辑。