基于FDC2214的手势识别系统设计与实现
基于K最近邻算法的手势识别装置
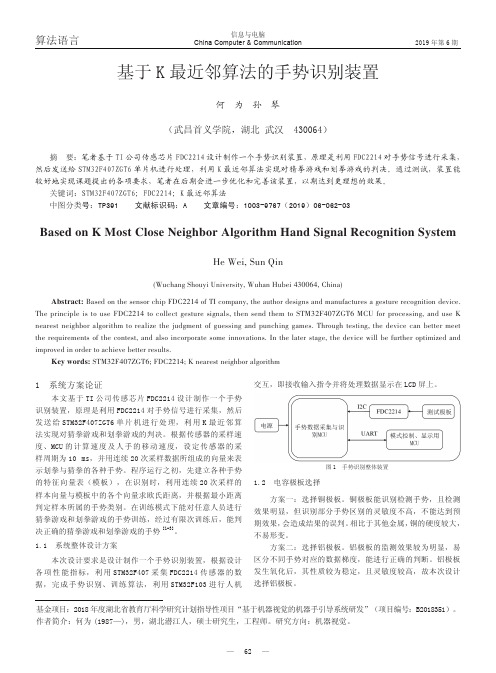
2019年第6期信息与电脑China Computer & Communication算法语言基于K 最近邻算法的手势识别装置何 为 孙 琴(武昌首义学院,湖北 武汉 430064)摘 要:笔者基于TI 公司传感芯片FDC2214设计制作一个手势识别装置,原理是利用FDC2214对手势信号进行采集,然后发送给STM32F407ZGT6单片机进行处理,利用K 最近邻算法实现对猜拳游戏和划拳游戏的判决。
通过测试,装置能较好地实现课题提出的各项要求,笔者在后期会进一步优化和完善该装置,以期达到更理想的效果。
关键词:STM32F407ZGT6;FDC2214;K 最近邻算法中图分类号:TP391 文献标识码:A 文章编号:1003-9767(2019)06-062-03Based on K Most Close Neighbor Algorithm Hand Signal Recognition SystemHe Wei, Sun Qin(Wuchang Shouyi University, Wuhan Hubei 430064, China)Abstract: Based on the sensor chip FDC2214 of TI company, the author designs and manufactures a gesture recognition device.The principle is to use FDC2214 to collect gesture signals, then send them to STM32F407ZGT6 MCU for processing, and use K nearest neighbor algorithm to realize the judgment of guessing and punching games. Through testing, the device can better meet the requirements of the contest, and also incorporate some innovations. In the later stage, the device will be further optimized andimproved in order to achieve better results.Key words: STM32F407ZGT6; FDC2214; K nearest neighbor algorithm1 系统方案论证本文基于TI 公司传感芯片FDC2214设计制作一个手势识别装置,原理是利用FDC2214对手势信号进行采集,然后发送给STM32F407ZGT6单片机进行处理,利用K 最近邻算法实现对猜拳游戏和划拳游戏的判决。
【CN109799914A】一种基于FDC2214的手势识别装置【专利】
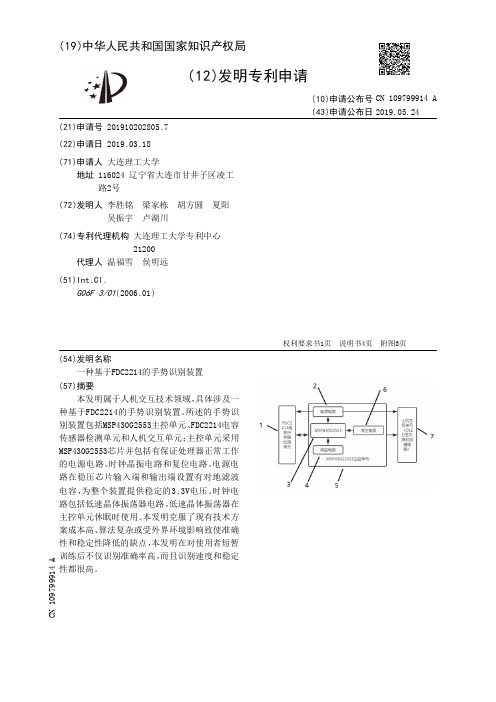
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910202805.7(22)申请日 2019.03.18(71)申请人 大连理工大学地址 116024 辽宁省大连市甘井子区凌工路2号(72)发明人 李胜铭 梁家栋 胡方圆 夏阳 吴振宇 卢湖川 (74)专利代理机构 大连理工大学专利中心21200代理人 温福雪 侯明远(51)Int.Cl.G06F 3/01(2006.01)(54)发明名称一种基于FDC2214的手势识别装置(57)摘要本发明属于人机交互技术领域,具体涉及一种基于FDC2214的手势识别装置。
所述的手势识别装置包括MSP430G2553主控单元、FDC2214电容传感器检测单元和人机交互单元;主控单元采用MSP430G2553芯片并包括有保证处理器正常工作的电源电路、时钟晶振电路和复位电路。
电源电路在稳压芯片输入端和输出端设置有对地滤波电容,为整个装置提供稳定的3.3V电压。
时钟电路包括低速晶体振荡器电路,低速晶体振荡器在主控单元休眠时使用。
本发明克服了现有技术方案成本高、算法复杂或受外界环境影响致使准确性和稳定性降低的缺点,本发明在对使用者短暂训练后不仅识别准确率高,而且识别速度和稳定性都很高。
权利要求书1页 说明书4页 附图3页CN 109799914 A 2019.05.24C N 109799914A权 利 要 求 书1/1页CN 109799914 A1.一种基于FDC2214的手势识别装置,其特征在于,包括MSP430G2553主控单元、FDC2214电容传感器检测单元和人机交互单元;所述的MSP430G2553主控单元包括MSP430G2553芯片、电源电路、时钟晶振电路和复位电路;电源电路采用LM1117-3.3稳压芯片,为整个装置提供稳定的3.3V电压;时钟晶振电路包括32.768kHz低速晶体振荡器电路,晶振的两端分别连接在MSP430G2553芯片的引脚P2.6和P2.7上;复位电路采用手动RC复位电路,RC复位电路与MSP430G2553芯片的引脚TEST相连;所述的FDC2214电容传感器检测单元包括FDC2214芯片和被测电容;FDC2214芯片的输入通道0的IN0A端和电感L1的一端连接,同时与电容C9的一端连接,输入通道0的IN0B端与电感L1和电容C9的另一端连接,电感L1和电容C9组成一个LC振荡电路,被测电容CSensor1的一端与电感L1的一端连接,被测电容CSensor1的另一端与GND连接;输入通道1的IN1A端和电感L2的一端连接,同时与电容C11的一端连接,输入通道1的IN1B端与电感L2和电容C11的另一端连接,电感L2和电容C11组成一个LC振荡电路,被测电容CSensor2的一端与电感L2的一端连接,被测电容CSensor2的另一端与GND连接;输入通道3的IN3A端和电感L3的一端连接,同时与电容C12的一端连接,输入通道3的IN3B端与电感L3和电容C12的另一端连接,电感L3和电容C12组成一个LC振荡电路,被测电容CSensor3的一端与电感L3的一端连接,被测电容CSensor3的另一端与GND连接;输入通道4的IN4A端和电感L4的一端连接,同时与电容C9的一端连接,输入通道4的IN4B端与电感L4和电容C13的另一端连接,电感L4和电容C13组成一个LC振荡电路,被测电容CSensor4的一端与电感L4的一端连接,被测电容CSensor4的另一端与GND连接;所述由电感和电容组成的LC电路将产生一个振荡频率f S;所述FDC2214芯片的VDD引脚连接到电源电路的输出端,ADDR、GND、PAD三个引脚共同连接到GND;FDC2214芯片的CLKIN经过一个串联的0欧姆电阻连接在一个来自外部40Mhz高精度晶振的输出端,该40Mhz高精度晶振为FDC2214芯片提供一个参考频率f REF;FDC2214芯片将测量的振荡频率f S转换为数字量,同时FDC2214芯片的IIC引脚SCL和SDA与MSP430G2553芯片的两个引脚P1.5和P2.0连接,MSP430G2553通过IO模拟IIC协议读取FDC2214芯片的转换结果;所述的人机交互单元包括OLED显示屏和按键电路;OLED显示屏的OLED_SCL和OLED_SDA 引脚分别连接在MSP430G2553芯片的引脚P2.1和P2.2上,通过IO模拟IIC协议进行通信实现多功能显示,OLED显示屏的引脚1连接到电源电路的输出端,引脚2连接到GND;所述按键电路的按键KEY1的一端连接在MSP430G2553芯片的引脚P2.5上,另一端连接至GND;按键KEY2的一端连接在MSP430G2553芯片的引脚P2.4上,另一端连接至GND;按键KEY3的一端连接在MSP430G2553芯片的引脚P2.3上,另一端连接至GND。
基于FDC2214单通道阈值分析的手势识别系统
实验技术与管理Experimental Technology and Management 第37卷第6期2020年6月Vol.37No.6Jun.2020ISSN1002-4956CN11-2034/TDOI:10.16791/ki.sjg.2020.06.024基于FDC2214单通道阈值分析的手势识别系统王鑫陈成凯=2,陈梓威1,2,霍非凡】‘2,林乐坤1,2,吴珂1,2,刘浩1,2(1.机电工程国家级实验教学示范中心,天津300384;2.天津理工大学工程训练中心,天津300384)摘要:设计了基于电容式传感器FDC2214的手势识别系统,经过有限次学习和阈值分析优化,识别正确率可以达到94.56%O首先设计所需的硬件电路,采用单极板单通道法和频率测量法提高测量的精度。
然后在学习模式中,通过对采集的不同手势的电容值进行阈值标定,记录训练数据,在识别模式中,调用训练模型对采集的识别者手势进行分类识别。
最后采用大量样本检测学习效果,证明系统具有较好的识别效果,关键词:电容式传感器;FDC2214;单通道;阈值分析;手势识别中图分类号:TP274+.2文献标识码:A文章编号:1002-4956(2020)06-0112-04Hand gesture recognition system based on FDC2214single channel threshold analysisWANG Xin1'2,CHEN Chengkai1'2,CHEN Ziwei1'2,HUO Feifan12,LIN Lekun1'2,WU Ke1'2,LIU Hao1,2(1.National Experimental Teaching Demonstration Center for Mechanical and Electrical Engineering Education,Tianjin300384,China;2.Engineering Training Center,Tianjin University of Technology,Tianjin300384,China)Abstract:A gesture recognition system based on capacitive sensor FDC2214is designed.After limited learningand threshold analysis optimization,the recognition accuracy can reach94.56%.Firstly,the hardware circuit isdesigned to improve the precision of measurement by using the single channel method and frequency measurementmethod.Then in the learning mode,the capacitive values of different gestures collected ware calibrated to recordthe training data.In recog n ition mode,the training model is used to classify and recognize the collected gesture.Finally,a large number of samples are used to test the learning effect,which proves that the system has a goodrecognition effect.Key words:capacitive sensor;FDC2214;single channel;threshold analysis;hand gesture recognition在国家创新驱动发展战略大背景下,人脸识别、语音识别等人匚智能技术在现代社会多个领域广泛应用⑴。
手势识别系统设计与实现
手势识别系统设计与实现手势识别系统是一种利用计算机视觉技术,通过捕捉和解析人体的手势动作,将其转化为指令或操作的系统。
这种系统在现实生活中的应用非常广泛,例如智能家居控制、虚拟现实游戏交互、医疗康复等领域。
本文将介绍手势识别系统的设计原理、实现技术以及其在不同领域中的应用。
一、设计原理手势识别系统的设计原理基于计算机视觉和模式识别技术。
首先,系统需要通过摄像头等设备捕捉用户的手势动作。
接下来,通过图像处理和机器学习算法对图像数据进行分析和处理,提取手势的特征,并进行分类和识别。
最后,根据手势的识别结果,系统执行相应的指令或操作。
为了有效地设计手势识别系统,需考虑以下几个方面:1.手势的数据采集:系统需要有合适的设备来捕捉用户的手势动作,如摄像头或深度传感器。
通过设备采集到的图像或深度图,系统可以获取手势的形状、位置和运动轨迹等信息。
2.图像处理和特征提取:利用图像处理技术,系统可以对图像数据进行预处理,如去噪、滤波等,以提高手势识别的准确性。
特征提取是手势识别的重要一步,可以通过细化、边缘检测等算法提取手势的特征信息。
3.分类和识别算法:通过机器学习算法,系统可以对提取到的手势特征进行分类和识别。
常用的分类算法包括支持向量机(SVM)、卷积神经网络(CNN)等。
分类器训练的过程需要合适的训练数据集,并进行特征选择和参数调优。
4.指令执行和操作响应:根据手势的识别结果,系统可以执行相应的指令或操作。
这需要与其他设备或应用程序进行联动,如控制灯光开关、播放音乐、切换虚拟现实场景等。
二、实现技术手势识别系统的实现可以采用不同的技术和工具。
下面将介绍几种常见的实现技术:1.基于摄像头的手势识别:使用普通摄像头或红外摄像头来捕捉用户的手势动作,并通过图像处理和机器学习算法进行识别。
如OpenCV库提供了一些常用的图像处理函数,可以用于手势识别的图像处理和特征提取。
2.基于深度传感器的手势识别:深度传感器可以提供更精确的手势数据,如微软的Kinect、Intel的RealSense等。
基于fdc2214的手势密码锁设计
Vol.27
第 21 期
No.21
电子设计工程
Electronic Design Engineering
2019 年 11 月
Nov. 2019
基于 FDC2214 的手势密码锁设计
乌绍懿,张富春,杨延宁,王 凯,吕 杨,韦 强
(延安大学 物理与电子信息学院,陕西 延安 716000)
摘要:设计了一款基于电容式传感芯片 FDC2214 的手势密码锁。以 MSP430F5529 单片机作为整
安全具有很大的意义。
作原理是采用不同的数字排列组合,组成一个数字
1 系统总体设计方案
串作为识别方式。但是,这种识别方式也容易被窃
收稿日期:2019-03-01
稿件编号:201903003
本设计以 MSP430F55017CXTD-01);延安大学产学研建设项目(2017cxy05);2018 年国
手势采集模块设计
手势采集模块功能依据电容感测原理实现。人
为密码的输入。显示模块采用最新的 OLED 显示单
的手和 FDC2214 的极板之间存在一定的分布电容,
令。报警模块的功能是在输入密码失败超过额定次
人的身份,首先按顺序获取 3 个不同的手势密码,再
元。驱动开锁模块完成单片机下达的开、关操作指
数时,系统产生报警。同时禁止手势密码的输入,进
error alarm,and password reset. The gesture password lock system has low power consumption,good
stability,high sensitivity and strong practical value.
基于FDC2214芯片设计的智能手势识别的设计

基于FDC2214芯片设计的智能手势识别的设计作者:崔海霞来源:《科教导刊·电子版》2018年第33期摘要只能手势识别是基于 TI 公司传感芯片 FDC2214 并配合使用大容量、高速度的STM32 单片机及 LCD 显示屏外加覆铜板设计而成,传感器将采集到的模拟信息经过 LC 振荡电路转化为单片机能处理的数字信息,STM32 将接收到的信息进行处理最后在显示屏上显示判决结果。
实现了对猜拳游戏和划拳游戏的判决,该装置具备了题目所要求的两种工作模式,在每种工作模式下又有两种子模式,即猜拳和划拳。
关键词 FDC2214 STM32 手势识别中图分类号:TM930 文献标识码:A1系统方案1.1单片机的比较与选择1.1.1 51 单片机的论证该单片机小巧灵活、成本低、易于产品化。
它能方便地组装成各种智能式控制设备以及各种智能仪表。
抗干扰能力强,适应温度范围宽,但其内存相对 STM32 单片机较小,运行速度慢。
1.1.2 MSP430 单片机的论证MSP430单片机是一种新型的 16位单片机,主要特点就是功耗小,速度快,主要开发语言是 c。
开发环境有 iar集成开发环境。
其集电压低,功耗低,3.3V供电,运行速度快,片内集成资源丰富于一体。
但由于其工作电压偏低,对于很多 5V的系统来说接口电路颇为麻烦,而且其 I/O无保护,过压过流会立即击穿。
1.1.3 STM32 单片机的论证STM32 是 32 位单片机,一次处理数据宽度 32 位。
其内部的 RAM ROM(flash)都很大,主频也很高,运算能力很强大,片上外设比较丰富,PWM功能强大,其 ADC精度达到12位,还有 DA模块实时时钟,是本设计的最佳选择。
2理论分析与计算2.1 FDC2214 的工作原理电容定义式:充放电公式:为电容初始电压;为电容充满终止电压;为任意t时刻电容电压数据计算采用电容阻值匹配算法。
其中€%^是相对介电常量,k 代表静电力常量,S 是电容极板的正对面积,d 为电容极板间的距离。
手势识别装置的设计与实现

2019年第18期信息与电脑China Computer & Communication软件开发与应用手势识别装置的设计与实现杨 蕊 米文辉(陕西科技大学镐京学院,陕西 西安 712046)摘 要:手势识别已成为人机交互技术的关键之一。
笔者基于传感芯片FDC2214设计制作了手势识别装置和STM32F103C8T6微控制器控制系统,能够通过JC22-V05串口显示器显示测试结果。
考虑到手势的大小,对“石头”“剪刀”“布”和“1”“2”“3”“4”“5”手势进行了识别实验,结果表明本算法可行。
关键词:手势识别;FDC2214;STM32F103C8T6中图分类号:TP391.41 文献标识码:A 文章编号:1003-9767(2019)18-104-02Design and Implementation of Gesture Recognition DeviceYang Rui, Mi Wenhui(Haojing College of Shaanxi University of Science & Technology, Xi'an Shaanxi 712046, China)Abstract: Gesture recognition has become one of the key technologies of human-computer interaction. Based on the sensor chipFDC2214, a gesture recognition device and a STM32F103C8T6 microcontroller control system are designed and manufactured, which can display the test results through JC22-V05 serial port display. Considering the size of gestures, the recognition experiments of "stone", "scissors", "cloth" and "1", "2", "3", "4" and "5" gestures are carried out. The results show that the algorithm is feasible.Key words: gesture recognition; FDC2214; STM32F103C8T61 设计方案本系统主要由输入切换部分、振荡部分、分频部分、单片机部分、显示部分、键盘部分和FDC2214的传感平面组成,电容式传感器的测量电路就是将电容式传感器看成一个电容并转换成电压或其他电量的电路[1-2]。
基于电容传感器的手势识别系统设计

When the tester's hands is close to the copper clad sheet in the test areaꎬthe digital output of the sensor will change obviously. In
order to make the real ̄ time capacitance data more stableꎬKalman filter and mean filter algorithm are used to process and realize
2. School of Electronic and Optical EngineeringꎬNanjing University of Science and TechnologyꎬNanjing 210094ꎬChina)
Abstract: In the human ̄ computer interaction systemꎬgesture recognition system has been widely used. In order to make gesture
tester’ s comfortable. Moreoverꎬthe gesture recognition system can realize the functions of " stroke" ꎬ" guess" and " man ̄ machine
war" . Andꎬit runs wellꎬhas high recognition rate and is interestingꎬand meets the real ̄ time requirements. Thereforeꎬthe gesture
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 159
•
系统采用了STM32作为核心控制芯片,使用FDC2214芯片获取电容值,通过滤波后,与样本数据对比,找到最短的k 个样本,判断其类型数量,达到识别手势的目的。
1.总体设计
系统总体设计框架如图1所示,采用了STM32F103ZET6作为核心控制芯片,而核心检测芯片则采用的是TI 公司的FDC2214来处理极板与手之间的容值。
得到的数据通过卡尔曼滤波和knn 算法来判断出不同手势之间的区别。
以独立按键来调节菜单和录入手势模板,通过oled 显示屏做出反馈并显示结果。
将手势录入一边,系统会自动处理好数据,再进入判决模式就
可以识别手势。
图1 系统总体设计框架
2.系统硬件设计
2.1 控制部分
本系统的控制核心采用了STM32单片机,它具有72M 主频,64K RAM 和512K ROM ,拥有多达14个定时器,自带PWM ,ADC ,DA,实时时钟等功能。
非常满足作为嵌入式系统的控制需求。
2.2 检测部分
电容检测部分是整个系统中最为重要的一部分,它决定了系统的识别率高低与否,整个系统的数据采样与检测都是建立在电容检测芯片的准确性上,因此选取TI 公司的FDC2214芯片来做为电容检测芯片,这是一种非接触式电容传感器,还有一个重要特性就是采用了EMI (抗电磁干扰)架构,因此它可以屏蔽高噪声环境干扰,在复杂环境确保传感器数据的准确性(周孟强,刘会衡,基于FDC2214手势识别装置的设计与实现:电子制作,2019)。
2.3 极板部分
极板采用的是三层结构,最下面一层使用亚克力板,主要用作
的oled 显示屏,它小巧精致,分辨率高,相比液晶屏幕它更加节能,非常适合作为系统的显示模块。
输入部分由4个独立按键组成。
4个独立按键分别作为切换键,确认键,返回键和系统复位键。
2.5 供电部分
电源部分采用了两块锂电池作为电源,使用稳压模块将电压降为5v 并后接入整个系统。
3.系统软件设计
软件系统流程图如图3所示。
3.1 数据滤波算法设计数据滤波是去除噪音干扰的有
基于FDC2214的手势识别系统设计与实现
杨凌职业技术学院 陈 阳
图2 极板实物图支撑。
中间一层使用铝箔胶带作为极板的金属层。
最上面一层采用硬质透明塑料膜,有防止手直接和铝箔接触和保护极板的作用(郭霞,谭亚丽,申淼,基于FDC2214的手势识别系统:传感器与微系统,2018)。
这样的设计好处在于可以很方便的自行调整和更换极板上的铝箔来达到不同的检测要求。
2.4 人机交互部分
人机交互部分由显示部分和按键输入组成,分别采用oled 显示屏和独立按键组成。
显示部分采用了0.96
英寸
图3 系统软件流程图
效方法,本系统采用卡尔曼滤波算法,这是一种当下使用非常广泛的滤波算法,它有计算量小,易于计算机实现等特点(张辉,卜雯意,施豪,基于FDC2214电容传感器的手势识别装置的设计与实现:巢湖学院学报,2018
)。
将极板上采集的数据进行实时的处理,将数据中
图4 系统整机实物图的噪音清除,把误差降到最小。
3.2 数据分类算法
kNN (k 最近邻算法)是一种数据分类方法,在学习模式下,将多次手势进行采样并滤波后,获取其特征向量作为样本数据,之后进入判定模式,系统会实时采样当数据稳定后,得到其特征向量,计算其特征向量与样
本数据之间的欧氏距离,找到相
距最短的k 个样本,判断其类型,即可识别手势(张硕,基于KNN 算法的空间手势识别研究与应用:吉林大学,2017)。
表1 石头,剪刀,布手势测试结果
手势实测结果石头石头正确石头石头正确石头石头正确石头石头正确石头石头正确剪刀剪刀正确剪刀剪刀正确剪刀剪刀正确剪刀剪刀正确剪刀剪刀正确布布正确布布正确布布正确布布正确布布
正确
正确率:100%
• 160
•
表2 手势一至五测试结果
手势实测结果11正确11正确11正确11正确11正确22正确23错误22正确22正确22正确33正确33正确33正确33正确33正确 4 4 正确44正确44正确44正确44正确55正确55正确55正确55正确55正确正确率:96%
4.系统测试与分析
系统整体实现如图4所示。
4.1 系统测试
将系统硬件及软件安装调试完成后,对不同的手势做实际测试及分析,等到的测试分析结果如表1、表2所示。
4.2 测试数据分析
石头剪刀布手势的识别率较高,每种手势5次测试全部正确。
一二三四五手势相较于石头剪刀布手势的结果正确率会低一些,在测试中二和三各自出现了一次识别混淆。
原因是石头剪刀布手势的电容值特征区别较大,因此测试结果准确率较高,而一二三四五手势中的二,三,四手势特征比较相近,而且每次测试时手和极板的接触程度都不完全相同,所以会出现一些误差,导致出现识别错误的情况。
5.结束语
本系统通过手势的录入学习后,可以进行手势判断,主要依靠各个极板上的电容值的特征向量来判别,对于特征向量差距较大的几种手势的判别效果非常好,但是在特征向量差距较小的几组手势的判别中有可能出现识别错误的情况(刘立博,魏东辉,手势识别系统的设计:南方农机,2019)。
系统可以较好的实现手势识别功能。
并且具有续航能力长,稳定性好,采样数据精确,判断结果准确等优点。
随着民航事业的飞速发展,近年来S模式雷达应用得到大力推广。
宜宾INDRA S模式二次雷达作为国内最早一批开放S模式雷达信号的雷达,在运行中积累了一定维护经验。
文章对该S模式二次雷达数据泄漏的故障实例进行分析,针对该型号雷达提出了系统参数设置及硬件配置方案,同时提出了S模式传输链路提速调改的建议。
引言:近年来,伴随着我国民航事业的飞速发展,民航空管行业新建投产的雷达均要求支持S模式,以期为管制用户提供更全面的飞行器的相关信息。
相比传统二次雷达,S模式二次雷达可为管制用户提供飞机24位地址码、航班呼号、空速、航向角、滚转角、上升率、下降率、飞行员意图信息等更为全面的飞行器信息。
宜宾INDRA S模式二次雷达作为国内最早一批开放S模式雷达信号并接入自动化系统使用的雷达,积累了一定维护经验,文章针对数据泄漏故障进行案例分析,对S模式雷达应用及该型号雷达的运行提出建议。
1 故障现象
数据泄漏故障发生时,INDRA雷达SLG监控主机上均显示有“COM X data leakage”告警,按故障发展及影响程度可分为四类,具体现象如下:
(1)初期:仅产生单个串口输出通道“COM X data leakage”告警,单个COM口监控显示橙色告警。
(2)中前期:多个串口输出通道反复显示“COM X data leakage”告警,多个COM口监控显示橙色告警,当所有在用串口输出通道同时显示橙色时,雷达系统通道进行切换。
若切换后,再次出现所有串口输出通道数据泄漏告警,则再次切换通道,导致雷达系统通道不定时多次来回切换。
(3)中后期:多个串口输出通道反复显示“COM X data leakage”告警,多个COM口监控显示橙色告警,当所有在用串口输出通道同时显示橙色时,雷达系统通道进行切换。
多次反复切换后,所有COM口监控显示绿色正常,但部分COM口无雷达数据输出,部分单链路终端有可能出现雷达信号中断现象。
(4)后期:多个串口输出通道反复显示“COM X data leakage”告警,多个COM口监控显示橙色告警,当所有在用串口输出通道同时显示橙色时,雷达系统通道进行切换。
多
INDRA S模式二次雷达数据泄漏故障实例分析
中国民用航空西南地区空中交通管理局 叶中脉 陈 扬。