西门子840D系统伺服优化
SIEMENS840D伺服系统优化调整
SIEMENS840D伺服系统优化调整
张硕实
【期刊名称】《科学技术创新》
【年(卷),期】2017(000)019
【摘要】数控机床中,SIEMENS840D数控系统占有很大比例,伺服系统是数控机区别于一般机床的重要标志。
伺服系统将数控系统提供的进给脉冲,经变换和放大后转换为机床的实际转动或位移,使机床能够跟随指令移动。
文章主要研究SIEMENS840D闭环伺服系统的动态性能分析。
该研究为伺服数控加工系统的快速响应及其加工精度提供参考。
【总页数】2页(P26-27)
【作者】张硕实
【作者单位】中国航发哈尔滨东安发动机有限公司,黑龙江哈尔滨150000
【正文语种】中文
【中图分类】TG659
【相关文献】
1.第五讲调整机电一体化系统--伺服环PID调整、NOTCH调整、自动调整 [J], 任偲
2.SIEMENS840D伺服系统优化调整 [J], 张硕实
3.FANUC0iD系统伺服设定及伺服优化调整研究 [J], 雷楠南
4.从系统优化入手实施结构调整——安钢内部结构调整调查之一 [J], 田力元;李炜
华
5.自动伺服调整型AC伺服电动机 [J], 刘阳春
因版权原因,仅展示原文概要,查看原文内容请购买。
SINUMERIK 840D数字驱动伺服611D参数分析与优化
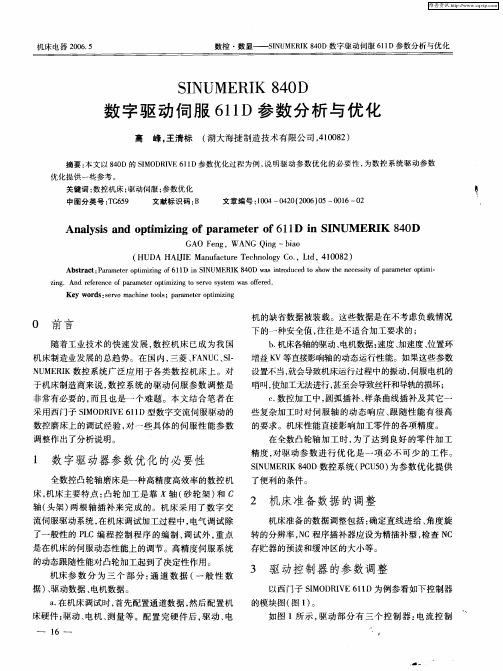
O 前 言
随着工业技 术 的快 速 发展 , 控机 床 已成 为我 国 数 机 床制造业发 展的总趋势 。在 国内 , 三菱 、A U S- F N C、I N M RK数 控系统 广泛应 用 于各类 数 控机床 上 。对 U EI
机 的缺 省数 据被装载 。这些 数据是在不考虑 负载情 况 下 的一种 安全值 , 往往是不适 合加工要求 的 ; b 机床各轴的驱动 、 . 电机数据: 速度 、 加速度 、 位置环
哨叫, 使加工无法进行 , 甚至会导致丝杆和导轨的损坏; C 数控加工 中 , . 圆弧插补 、 曲线 插补及 其它 一 样条 些复杂加工时对 伺服 轴 的动 态响 应 、 随性 能有 很 高 跟 的要求 。机床性 能直接影响加 工零 件 的各项精度 。 在全数 凸轮轴 加 工时 , 了达 到 良好 的零件 加 工 为
增益 K V等直接影响轴 的动态运行性 能。如果这些参数 设置不当, 就会导致机床运行过程 中的振动 , 伺服 电机的
于机床制造商来 说 , 控系 统 的驱动伺 服 参数 调整是 数
非常有必要 的 , 而且 也是 一个 难题 。本文 结合笔 者 在
采用西 门子 SMO R V 1 I D I E6 1 D型数字交流伺服驱 动的
精度 , 对驱动 参 数 进行 优 化 是 一项 必不 可 少 的 工作 。
SN M RK 8 0 I U E I 4 D数控系统 ( C 5 ) P U 0 为参 数优化 提供 了便 利的条件 。
2 机 床 准备 数据 的调 整
机床准备 的数据 调整包括 : 直线进 给 、 确定 角度旋
的模 块图 ( 1 。 图 )
Байду номын сангаас
床硬件 : 驱动 、 电机 、 测量 等。配置 完 硬件 后 , 动 、 驱 电
西门子840D SL伺服插补轴圆度测试的参数优化与研究
西门子840D SL伺服插补轴圆度测试的参数优化与研究作者:张义红张立群来源:《中国科技纵横》2017年第19期摘要:本文主要研究数控机床伺服插补轴圆弧轮廓轨迹精度的伺服参数优化方法。
并结合Renishaw球杆仪和伺服Bode图来针对伺服圆弧插补轮廓轨迹精度进行反复的测量,并根据测量结果不断分析和优化相关伺服参数,使通过伺服参数优化后的数控机床伺服轴插补轮廓精度得以显著提升。
关键词:西门子840D Solution Line;伺服驱动参数优化;伺服圆度测试;Renishaw球杆仪中图分类号:TG659 文献标识码:A 文章编号:1671-2064(2017)19-0075-021 概述21世纪以来,由于机床加工工艺的不断优化和完善,多伺服轴联动插补的数控机床已经被广泛应用于制造业的各个领域,并逐步取代普通机床成为具有核心竞争力的制造装备之一。
插补轴圆度轮廓轨迹精度的伺服参数优化工作是整个加工精度优化的重点步骤之一,也是提高数控机床整体加工质量的核心要素之一。
因此,针对此项内容进行深入地分析和研究具有较高的学习应用价值。
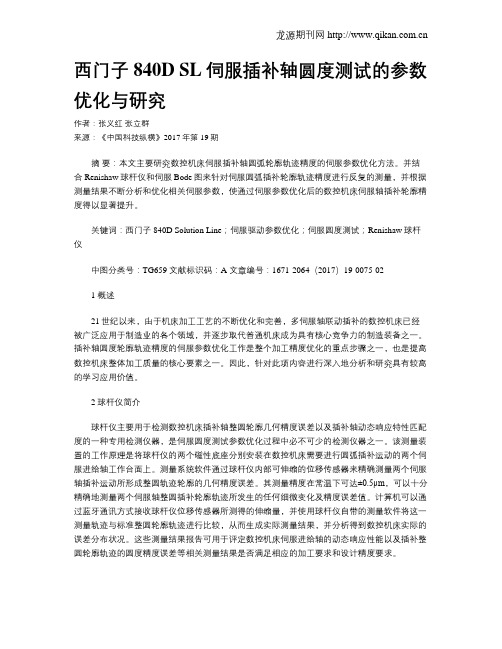
2 球杆仪简介球杆仪主要用于检测数控机床插补轴整圆轮廓几何精度误差以及插补轴动态响应特性匹配度的一种专用检测仪器,是伺服圆度测试参数优化过程中必不可少的检测仪器之一。
该测量装置的工作原理是将球杆仪的两个磁性底座分别安装在数控机床需要进行圆弧插补运动的两个伺服进给轴工作台面上。
测量系统软件通过球杆仪内部可伸缩的位移传感器来精确测量两个伺服轴插补运动所形成整圆轨迹轮廓的几何精度误差。
其测量精度在常温下可达±0.5μm,可以十分精确地测量两个伺服轴整圆插补轮廓轨迹所发生的任何细微变化及精度误差值。
计算机可以通过蓝牙通讯方式接收球杆仪位移传感器所测得的伸缩量,并使用球杆仪自带的测量软件将这一测量轨迹与标准整圆轮廓轨迹进行比较,从而生成实际测量结果,并分析得到数控机床实际的误差分布状况。
西门子840D伺服系统控制参数优化分析与研究
西门子840D伺服系统控制参数优化分析与研究作者:刘端健阳春华来源:《计算技术与自动化》2013年第02期摘要:在分析现代机械加工制造行业中高精密数控机床伺服系统控制参数优化重要性的基础上,简要介绍应用普遍的西门子840D伺服系统,着重研究西门子840D伺服系统控制参数优化的原理与方法。
对使用840D伺服系统的圆柱齿轮加工机床的位置环、电流环与速度环进行优化,通过对比优化前后的加工效果和同步误差,证明伺服系统控制参数优化可以提高齿轮齿面加工精度和光洁度以及加工效率。
关键词:伺服系统;控制参数;840D中图分类号:TG659 文献标识码:A1引言现代高精度数控机床是实现各种复杂曲面零件的精密加工的最重要的关键设备,很多精密数控机床的直线轴都采用当今最先进的直接驱动(直驱)技术,由伺服电机直接驱动进给装置,通过多种方式的插补技术很好满足了加工高精度和高表面光洁度复杂工件的要求。
直驱技术其优点是动态响应特性好、运行速度快,精度高。
由于驱动部件跟负载间直接连接,无需做额外的硬件连接误差补偿。
因此直驱技术在各种中、高端的机床产品和模具生产机床中得到了广泛的应用[1]。
直驱技术虽然具有上述优点,但是由于省去了电机跟负载端的机械传动链,传动比近似为1:1,这也使得电机对负载变化显得格外敏感[2],同时负载的固有频率容易引起伺服电机驱动系统产生共振现象,引起机床在加工零部件过程中表现出震动和抖动以及加工噪声等现象。
因此需要对伺服系统的速度环、电流环、位置环控制参数进行优化[3]。
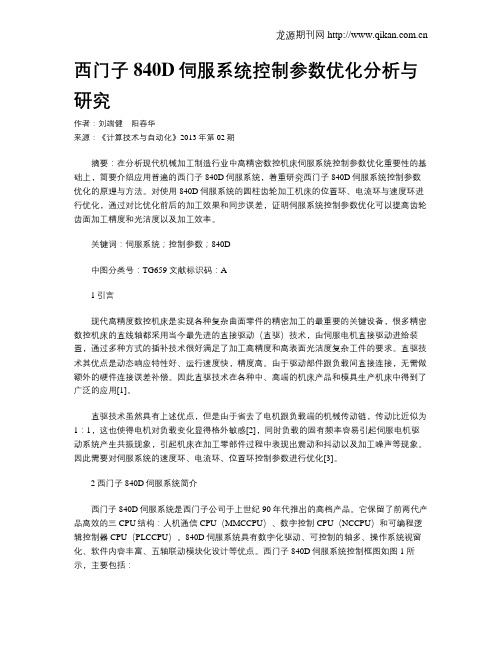
2西门子840D伺服系统简介西门子840D伺服系统是西门子公司于上世纪90年代推出的高档产品。
它保留了前两代产品高效的三CPU结构:人机通信CPU(MMCCPU)、数字控制CPU(NCCPU)和可编程逻辑控制器CPU(PLCCPU)。
840D伺服系统具有数字化驱动、可控制的轴多、操作系统视窗化、软件内容丰富、五轴联动模块化设计等优点。
西门子840D伺服系统控制框图如图1所示,主要包括:1)数字控制单元NCU,集成了SINUMERIK 840D 数控CPU 和SIMATIC PLC CPU 芯片,包括相应的数控软件和PLC 控制软件。
有关840D五轴联动加工中心的优化分析(1)
工艺设计改造与检测检修齐齐哈尔数控五轴联动数控机床科技含量高,可以用于复杂曲面零件的高精度加工。
五轴联动机床所需的五轴联动数控系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等行业,有着举足轻重的影响力。
西方发达国家一直对我国引进这方面技术和产品采取种种限制和封锁。
近年来,齐齐哈尔数控打破国外技术封锁,已有一百五十多台五轴联动高档系统与高档数控机床配置,在我国的国防、汽车和重大装备制造企业中应用。
齐齐哈尔数控积极与主机厂建立战略合作关系,实行共同开发、联合销售、共同为用户服务的策略。
主要用户包括大连机床集团、北京第一机床厂、北京机电院、沈阳机床集团、武汉重型机床厂、青海一机、桂林机床股份有限公司等50多家数控机床厂。
实现了普及型数控车床、全功能数控车床、车削中心、数控铣床、加工中心的批量配套。
产品的性价比及可靠性得到了最终用户的认可和肯定。
1、五轴联动加工中心概述五轴联动加工中心的刀具排布采用两轴控制排式刀架排布的结构,结构简单、换刀快捷、可靠性极高。
加工中心具有超长行程的Z 轴,行程可达230mm。
因此机床在加工较长零件时,和同类数控车床相比,可以明显减少送料次数,提高加工效率。
对于许多长度在180-230mm的零件,可以一次送料完成零件全长度的加工。
五轴联动加工中心配有高速精密同步导套,因此可以完成对钢件、不锈钢件的大批量精密加工以实现高品位零件的高速切削。
数控加工中心配备三轴钻孔加工功能,可以完成零件轴端的钻孔及攻丝的加工。
并且针对客户的零件,五轴联动加工中心配备安装有各类钻铣动力刀具、或者旋风刀具的摆动动力刀具模块,因此动力刀具可以在0-90度范围内摆动,以完成各种轴件的多方向精密钻、铣加工功能。
加工中心的送料部分可以配备自动送料器,接料部分可安装短件接料器及长件接料器,以实现一人操作、看护多台机床的“一人多机”加工模式,为工厂节省人力资源。
还可以配备自动排屑器等多种附加设施并组成柔性加工生产线,以完成自动化加工。
840Dsl系统-驱动优化

840Dsl系统-驱动优化使用 Sinumerik Operate 的自动伺服优化功能,通过一系列对话画面,实现单个轴和插补轴组的自动优化。
使用测量和伺服跟踪功能,检查伺服优化结果和轴动态特性。
本节主要通过V4.7 SP3版本的Sinumerik Operate 软件演示以下功能:· 单轴自动优化· 插补轴组优化· 检查或修改速度环或位置环的优化结果·检查或修改插补轴组的优化结果· 生成优化报告(单轴和插补轴组)· 保存优化结果· 重新载入优化结果· 电流环测量· 速度环测量· 位置环测量危险:驱动优化时需要注意安全,如利用行程限位监控等措施来保证在优化时的人身和机床的安全,这一点尤其要给予重视。
特别是垂直轴的安全保护。
1、驱动优化的说明当机床使用缺省设定不能满足要求时,需要进行驱动优化,主要步骤如下:· 利用自动伺服优化功能优化单个轴· 使用测量功能和跟踪功能检查和设定轴特性· 利用插补轴组优化功能优化插补轴· 使用圆度测试功能调整和匹配插补轴间的关系· 通用数据,通道数据和轴数据调整手动优化单个轴的顺序是:电流环、速度环、位置环、跟踪以及圆度测试。
如果机床或轴是首次进行优化,建议采用鲁棒性方案的优化,无需后续手动调整。
这样确保了在未手动优化的情况下,轴也能正确运行,控制器能正确设置。
现在轴可进行试车、对齐等。
第二步,再次执行优化,但现在是采用预期方案的带实际负载的机床(例如安装有卡盘和可能的工件)。
不带任何负载时,机床可能正好符合无负载运行,但是带有卡盘和工件时则不稳定,则可进行手动优化调整。
2、自动优化选项设置和方案选择2.1选项设置在对话屏幕“选项轴”中可通过软键“选项”控制自动伺服优化的过程。
2.2选择方案方案设置分为三部分:轴(一般方案设置)、转速(转速控制器)和位置(位置控制器)。
西门子840D伺服系统参数优化与研究
图1 61 1 D驱 动 系 统 结 构框 图
( MD 1 4 0 9 ) 来增 强伺 服 系 统 的稳 定性 _ 2 J 。使 得在 机 床 正 常运行 的情 况下 , 增益 尽量 大 , 积 分 时间尽 量小 。具
体优 化过 程如 下 : 2 . 2 . 1 频 率响应 测试 当积 分 时间在 1 个 保 守 值 的情 况 下 , 通 过频 率 响
能 和 圆测试进 行伺 服参 数调 节 , 在 一 定 的机 械状 态 下 尽 可能 提高 系统 的性能 。
8 4 0 D伺 服 系统包括 电流 环 、 速 度环 和 位置 环 3个
d B
一 一 一 一 l I 一 一 l I 一 ■ I 一 l I + l I + I 一 l I 一 一 一 + l 一 一 I 一 I 一 I l … I I l —
I 一 一 - 4一
I I l I
一
I l
+ 一 一 l l
l
l l I l I
l ■
一
l
l III + +
I
l
I
l l I I I
I
I
I
l l I l I
一
一
一
一
I 一 一
I
一
l
- - - 一 II I - 一 - I - - l I — I l + I + l l l I …. : Il 一 一 I l _ _ ● l 一 二 一 一 一 一■ 罩一 妄 一
一 一 一 一
I l
I I
I I
一 l
I I
SINUMERIK 840D_810D驱动优化基础与分析
840D/810D 驱动优化基础与分析1 概述一台数控机床的结构通常采用铸铁的床身,运动部件如工作台(或称为溜板)由导轨通过带滚动体的支承部件支撑。
伺服电机通过连轴器与滚珠丝杠连接,伺服电机旋转动作通过滚珠丝杠和丝杠螺母转换为直线运动,推动工作台按照数控指令运动,如图1所示为数控机床的传动系统结构。
图1 数控机床传动系统结构图在理想状态下,即所有的机械部件都是刚性的,而且无传动误差,伺服电机的推力可以直接作用到工作台上,工作台带动工件与高速旋转的主轴产生切削运动。
但是实际的情况是,传动系统存在各种误差,如丝杠的反向间隙、导轨支承与导轨之间的间隙,滚珠丝杠的弹性变形,机床工作台的弹性变形。
当伺服电机产生的转矩作用在丝杠上时,伺服电机的位置和速度的变化与工件的实际速度和位置的变化不是线性关系。
特别是当伺服电机以各种不同的速度运行时,加速度的频率发生变化,由于机械系统的弹性存在使得实际的运动发生了变化,这种变化称为动态响应。
其实从机械设计的角度分析,由于材料、制造和装配等原因,每台机床的固有频率,或称为最低自然频率是不同的。
2 驱动优化理论基础2.1 理论模型与响应机床及其相关的属性中最低自然频率是一个重要参数,也是描述机床动态响应的依据。
机械的特性可以通过一个数学模型进行模拟。
图2表示的是一个简化的模型。
在模型的左边是伺服电机,右边是负载,伺服电机与负载之间由弹簧连接。
图2 通过弹性耦合的传动模型这是一个现实生活中的实例来描述弹性物体的运动。
手持一个通过弹簧连接的负载,当手缓慢上下运动时,负载可以准确地跟随手的运动而运动。
当手的上下运动速度加快后,负载进入共振条件,随着手上下运动频率的增加,负载不再跟随手的激励运动而运动,而且其运动状态与手的能量大小无关,如图3所示。
图3 给定与负载之间的位置变化在数控机床中传动系统不是刚性的。
金属床身在外力作用下的弹性变形、丝杠的扭曲变形、丝杠的反向间隙等因素使得传动系统成为其动力源――伺服电机的弹性负载。
应用SINUMERIK840D高级HMI进行伺服驱动的速度环优化
中 , 坐 标 分 度 从 下 到 上 为 一6 B 纵 0 d 、一4 B、 0 0 d 一2
d 0d 2 B B、 B、0d 。横坐标则 为 以 0 1 或 1H 为起始 . Hz z 的 1 分 度 : . 1 1 _ 10或 1 1 — 10 0倍 01 — 0 0 — 0 0 —
Stigt e设 定时 间) 输入 测试 信号 到记 录测 el m ( tn i :
试 数据 间的延 时时 间 , 一般地 在 0 2S 之间 。 . ~1S 设置测试参数 时务必谨慎 , 测试参数设 置不合适会 导致电机负载人为增加过大 , 甚至导致电机过载报警。
设 置测试参 数一频率 响应特性 测试一根据 伯德 图
态 特性时 , 这些相 对保 守 的驱动 参数 就可 以进 行 驱动 的优 化 。同时 , 优化工具 也是一种诊 断工 具 , 以对机 可 电传动链进行诊 断分 析 。而这些特性 的直观反 映就是 “ 德图 ” 伯 。 伯德 图 是 用 振 幅 响 应 特 性 曲线 ( m lu e r. A pi d e t
( a r s a eC mp s e Maeil R sac n tue. 1 0 5 Xin Aeop c o o i tras e e rhI si t 7 0 2 ) t t
Ab t a t I h I UME K8 0 / 1 D .t es e d c nr l r p i z t n c n b x c td i eHMI—a v n e fP U5 .T e sr c :n t e S N RI 4 D 8 0 h p e o t l t o e o miai a ee e ue n t o h d a c d o C 0 h o t z t n c n u g a e t e d n mi c a a tro c i e a e ,a d i c n u g a e t e ma h nn u l y p i ai a p r d h y a c h r ce fma h n x s n a p d h c i i g q ai . mi o t r t
840d数控系统伺服驱动的自动优化
840d数控系统伺服驱动的自动优化(2008-12-25 06:40:59)
标签:伺服优化抱闸伯德图plc机
分类:数控技术床自动优化840d杂谈
1、自动优化的的功能:
自动优化针对的是速度环的调整
2、位置:In the “Start-up” area, select the “Drives/servo” soft key. In the extended menu, press the “Aut. ctrl setting” soft key. The main “Automatic controller setting” display appears.
在这个界面下可以定义相关参数,一般只需要设travel range ,upper limit-lower limit为一个优化时移动的范围,根据轴的实际长度选择即可。
注意不要超出行程。
3、优化的步骤及注意点:
第一步骤是进行机床系统测量,电机将以一定转速正转直到达到设定的监控距离。
要注意的是如果优化轴是带抱闸的话,此时需将抱闸打开(利用plc程序或者手动控制抱闸开合)
第二步骤是进行机床系统测量,电机将以一定转速反转直到达到设定的监控距离。
第三步骤是进行电流环检测,要注意的是如果优化轴是带抱闸的话,此时需将抱闸闭合(利用plc程序或者手动控制抱闸开合),安全起见可以垫一块木头。
接下来的步骤是进行计算优化数据。
此时还可以根据实际情况设置增益和微分时间并进行重新计算。
这个部分的作用一直有疑问,实际中我也没有再去调整。
希望有知道的大侠指教。
最后一步是保存和伯德图的测量。