LD驱动装置
理光复印机SC故障代码全部

理光Aficio551/700复印机SC故障代码说明一代码号症状可能原因SC101 B 曝光灯出错•曝光灯不良•灯的调节器坏了•曝光灯连接器不良•标准白板脏了•扫描器反光镜脏了或者扫描器反光镜移位•SBU 板不良•SBU 连接器不良•透镜块移位在扫描白板时,没有适当地探测以标准白电平SC120 B 扫描器原位出错1•扫描器原位传感器不良•扫描器电机坏了•扫描器电机驱动板不良•扫描器原位传感器连接器不良•扫描架驱动电机连接器不良机器初始化或复印期间,扫描器原位传感器没有探测到开启的状态。
SC121B 扫描器原位出错2 •扫描器原位传感器不良•扫描器电机坏了•扫描器电机驱动板不良•扫描器原位传感器连接器不良•扫描架驱动电机连接器不良机器初始化或复印期间,扫描器原位传感器没有探测到关闭的状态SC124B 扫描仪电机编码器信号出错•扫描仪电机连接器不良•扫描仪电机不良•MCU 不良•扫描仪钢丝,计时皮带,滑轮移位•PSU 不良扫描仪电机没有发出编码器信号SC125B扫描仪电机速度出错1•扫描仪电机不良扫描仪在它的原位传感器开启前在返回时停止。
当扫描仪HP 传感器开启时,它的速度比规定的要慢。
•MCU 不良•扫描仪驱动上负荷太重SC126B 扫描仪电机速度出错2•扫描仪电机不良•MCU 不良•扫描仪驱动上负荷太小扫描仪返回时,它超出运行扫描仪HP 传感器10mm 以上SC127B 扫描仪电机编码器旋转方向出错•扫描仪电机不良•MCU 不良当初始化时,扫描仪沿著指示方向相反的方向移动SC127B 扫描仪电机编码器旋转方向出错•扫描仪电机不良•MCU 不良当初始化时,扫描仪沿著指示方向相反的方向移动理光Aficio551/700复印机SC故障代码说明二代码号症状可能原因SC128D 扫描仪电机启动出错•扫描仪电机不良•MCU 不良•PSU 不良•扫描仪驱动上负太大扫描仪电机速度直到开始读取原稿后才达到目标速度SC129D 扫描仪电机速度控制出错•扫描器电机不良•PSU 不良•MCU 不良•扫描器驱动不良扫描仪在扫描时超出范围SC130D SBU 出错•SBU 不良•SBU 和BICU 之间的电缆不良主开关开启时,BICU 无法从SBU 上接收正确的信号SC300B 充电电晕输出出错1•充电P.P 不良•充电电晕装置的连接不好充电电晕装置的反馈电压太高SC301B充电电晕输出出错2 •充电P.P 不良充电电晕装置的PWM 控制太高•充电电晕装置的连接不好SC302B 充电电晕输出出错3•充电P.P 不良•充电电晕装置的连接不好充电格栅的控制PWM 控制太高SC303B 充电电晕输出出错4•充电P.P 不良•充电电晕装置的连接不好充电栅极反馈的电压太高SC305B 充电电晕丝清洁器出错1•充电电晕丝清洁器电机坏了•充电P.P 不良•IOB 板坏了充电电晕丝清洁器不返回到自己的原位SC306B 充电电晕丝清洁器出错2•充电电晕丝清洁器电机连接器未接上充电电晕丝的清洁器电机连接器没有连接上SC310B 电位传感器出错1•电位传感器不良•电位传感器和I/O 板(IOB) 间的连接不良•IOB 不良•鼓单元和I/O 板(I/OB) 之间的连接不良•显影动力组件不良理光Aficio551/700复印机SC故障代码说明三代码号症状可能原因SC311D 电位传感器出错2 •电位传感器不良•电位传感器和I/O 板(IOB) 间的连接不良•IOB 不良•鼓装置和I/O 板(I/OB) 之间的连接不良•显影动力组件不良在过程控制起始设定上校准鼓电位传感器时,鼓电位传感器的输出电压超范围SC312D电位传感器出错4 •电位传感器不良当在过程控制初始化上调节鼓的电位(V D ) 时,鼓电位传感器探V D 大于V G ( 格栅电压)•电位传感器和I/O 板(IOB) 间的连接不良•IOB 不良•鼓装置和I/O 板(I/OB) 之间的连接不良•显影动力单元不良•脏的或摩损的充电电晕丝SC314D 电位传感器出错5 •电位传感器的探测•电位传感器和I/O 板(IOB) 间的连接不良•IOB 不良•鼓单元和I/O 板(I/OB) 之间的连接不良•LD 单元不良在过程控制初始设定时,对LD 电源的调节进行豉电位(V H ) 的调整。
理光复印机维修专业手册

RICOH理光复印机(AFICIO1035/1045)维修手册目录1 故障诊断 (1)1.1 维修呼叫状况 (1)1.2 电气元器的故障 (16)1.3 熔丝熔断后的故障状态 (18)1.4 LEDS (18)1.5 测试点 (18)2 维修表 (19)2.1 维修程序模式 (19)1 故障诊断注意:当压板或ARDF是打开时,主电源LED亮起或闪烁,主机同时与传真机或网络服务器通讯,或者机器进入硬盘或内存进行读取或写入数据。
1.1 维修呼叫状况1.1.1 一览表维修呼叫状况有四个级别。
注意:1)如果问题是有关电气电路板的,在更新PCB之前先断开后再连接连接器。
2)如果问题是有关电机锁定的,在更换电机或传感器之间先检查机械负载。
1.1.2 SC代码说明1.2 电气元器的故障1.2.1 传感器4.2.2 开关1.3 熔丝熔断后的故障状态1.4 LEDS1.5 测试点2 维修表注意:当压板或ARDF打开时,主电源LED亮起或闪烁,主机同时与传真机或网络服务器在通讯,或者机器在进入硬盘或存储器来读取或写入数据。
2.1 维修程序模式2.1.1 维修程序模式的操作使用维修程序模式来检查电气数据,改变模式和调节数值,在此提供了二个维修程序模式:·SP模式(维修):包括了在SP显示中常规维修和调整的全部选项。
·SSP模式(特别维修):包括了在SP显示中所不需要的常规设定值和调整一般SP模式和一些外加的选项。
(在以下表中多数标有“DFU”)。
不必要时,勿改变这些重的设定值。
至详细地情节,与你的主管联系。
进入和退出SP模式1. 按下Clear Mode键。
2. 用小数字键盘键入“107”。
3. 保持按下Clear/Stop键3秒以上。
4. 进入维修模式。
进入一般维修模式:在触摸面板上,按复印SP。
SP。
5. 按Exit二次来返回到复印窗口。
注意:用SP2-902来执行测试图形打开。
SP模式按钮概要这里是触摸面板按钮的简短概要。
LED道路照明装置在低温运行环境下的可靠性保障

品在 配 光 曲线 、 系 统 光 效 等 关 键 技 术 指 标 方 面 进 步 显着 ,在 道 路 照 明 标 准 的符 合 性 、 节 能 效
果等方 面 已经 达 到相 关标 准 和规 范 的要 求 。 尽 管 L D 灯技 术 水 平 的发 展 较 快 ,但 是 大 E路 多 数L D E 路灯 厂 商 在 产 品研 发 过 程 中 忽 略 了在 寒 地 应 用 环 境 下 的特 殊 技 术 要 求 。一 个 普 遍 的 错 误 认 识是 ,L D 寒 冷 地 区应 用 有 利 于 散热 ,不 E在 容 易发 生 故 障 。殊 不 知 , 寒 冷 应 用 环 境 下 ,对 LD E 路灯 有 着 更 为 严格 的技 术 要 求 ,主 要 有 以下
a T c ni e h c
… … … … …
l 咖 技术 透析 . l
或 正 常 运 行 , 引 发 故 障 的具 体 原 因 主 要 有 以 下
几方 面 :
表 面 的 高 压 线 缆 属 于 亲 水 性 材 料 也 是 一 个 重 要
诱 因 。 由于 影 响 到 道 路 交 通 的安 全 , 因 此 防 止 冰 凌 凝 结是 L D 灯 在 寒 冷 地 区应 用 必 须考 虑 到 E路 的安全 措 施 。
( ) 开 关 管 在 低 温 条 件 下载 流 子 的 密 度 1
和 活 性 都 会 降 低 ,过 载 保 护 的 启 动 点 也 会 因 此
降低 。
为 了 解 决 这 一 关 键 技 术 , 我 们 通 过 对 覆 冰 体 表 面 进 行 显 微 成 像 分 析 ,分 析 了水 在 物 体 表 面 结 冰 , 以及 冰 在 物 体 表 面 可 以 牢 固 附 着 的 原 因 。实 验 结 果 发 现 ,仅 仅 采 用 疏 水 性 能优 异 的
LD型电动单梁桥式起重机

LD型电动单梁桥式起重机一、简单介绍LD型电动单梁桥式起重机(以下简称起重机)是按标准JB1306-2008设计制造的,与CDI、MDI等形式的电动葫芦配套使用,成为一种有轨运行的轻小型起重机,其适用起重量为1-10吨,适用跨度为7.5~22.5米,工作环境温度在-25~+40℃ 范围内。
为方便用户,设有地面和操纵室两种操纵形式,操纵室又设有端面及侧面开门两种形式,以供用户选择。
本产品为一般用途起重机,多用于机械制造、装配、仓库等场所,其结构特点如下:1、金属结构部分主梁采用钢板压延成形的U形槽钢,再与工字钢组焊成箱形实腹梁。
横梁也是用钢板压延成U形槽钢,再组焊成箱形横梁。
为贮存运输方便。
主横梁之用M20 螺栓(45号钢)连接而成桥架。
2、电动葫芦电动葫芦可起升重物,并沿主梁横向移动,其结构特点详见有关电动葫芦说明书。
3、运行机构本产品是采用分别驱动形式,制动靠锥形制动电机来完成,传动是“一开二闭”式三级齿轮传动。
4、电气设备本产品所用运行电动机有单速锥形鼠笼电动机(用于运行速度20、30和45 米/分)地操和锥形绕线电动机(用于运行速度45、60、75米/分)驾操二种形式,随操纵形式不同,设有两种电气控制。
电动葫芦及整个起重机均设有安全装置,如起升限位开关,终点限位开关等。
5、本产品规格表示方法如下(1)地面操纵例:起重量3吨,跨度10.5米,运行速度30米/分。
表示方法:LD3T0.5-30(2)操纵室操纵例:起重量5吨,跨度16.5米,运行60米/分。
表示方法:LDC5-16.5-60二、外形总图图 1注:厂房屋顶高度应比起重机最高尺寸三200mm 括号内尺寸(800)仅为闭式端面开门操纵室用。
三、性能参数表1.技术规格:起重跨度中级工作制度JC=25% 主要尺寸起重机运行机构电动萌^1电电车轨轨吊主吊地操驾驾闭>200 H1 h2.总重及轮压最大轮压 5.51 5.53 5.64 5.67 5.81 5 ).83 6 ).036.05 6 .32 6 .60 驾开操总重 3.29 3.37 3.80 3.91 4.53 4 L62 5 兀395 .496 .547 .67最大轮压 5.81 5.83 5.94 5.97 6.11 6 ).13 6 ).336 .95 6 .44 6 .71驾闭操总重 3.39 3.37 3.80 3.91 4.53 4 L62 5 兀395 .496 .547 .67最大轮压 5.81 5.83 5.94 5.97 6.11 6 ).13 6 ).336.95 6 .44 6 .711、在用户现场上将起重机运行机构的驱动装置安装在横梁上。
v带基准长度ld解释 -回复

v带基准长度ld解释-回复什么是v带基准长度(ld)?V带基准长度(ld)是V带使用中的一个重要参数,用于描述V带的长度。
V带是一种传动带,通常由橡胶和织物或金属丝线制成。
它们常用于驱动机械设备中的传动装置,如工业机械、农业机械、汽车和摩托车等。
V带基准长度的计算和应用可以帮助正确选择和安装V带,并确保传动效果良好。
为了理解V带基准长度(ld)的含义和计算方法,我们首先要了解V带的结构。
V带通常由内接圆和外接圆形成。
内接圆是指V带需要安装在的带轮的最小直径,而外接圆则是指V带需要安装在的带轮的最大直径。
V带基准长度(ld)是指V带接触带轮的长度。
计算V带基准长度的公式为:ld = π* (外接圆直径+ 内接圆直径)/2基准长度的单位通常为毫米(mm)。
通过计算基准长度,我们可以确定需要购买的V带长度,并根据给定的V带长度安装带轮。
下面我们将分步回答与V带基准长度(ld)相关的问题。
第一步:了解V带系统中的参数在计算V带基准长度之前,我们需要了解V带系统中的几个参数。
这些参数包括内接圆直径、外接圆直径和V带带型代码。
内接圆直径和外接圆直径可以通过测量带轮的直径获得,而V带带型代码则是指V带的型号和尺寸。
第二步:计算V带基准长度(ld)根据上述公式,我们可以根据内接圆直径和外接圆直径计算V带的基准长度(ld)。
首先将内接圆直径和外接圆直径相加,然后除以2,最后乘以π(圆周率)即可得到基准长度。
确保使用相同的单位进行计算。
第三步:选择合适长度的V带一旦计算出V带的基准长度,我们可以根据基准长度选择合适长度的V带。
通常,V带的长度会标记在其外部表面上。
选择适当长度的V带非常重要,因为过长或过短的V带都会导致传动效率降低和带轮磨损加剧。
第四步:安装V带选择适当长度的V带后,我们需要将其正确安装在带轮上。
首先,确保带轮表面干净,无油污和磨损。
然后,将V带沿着带轮的凸起部分缓慢安装,确保V带与带轮的接触紧密而不滑脱。
半导体激光器LD恒流源驱动电路的设计与实验

半导体激光器LD恒流源驱动电路的设计与实验这款半导体激光器的恒流源驱动电路,是根据实际的项目需求进行设计的。
项目要求是半导体激光器得根据探测距离,能改变输出光功率,这就要求半导体激光器的驱动电路输出的电流是可调的,这样现阶段几种半导体激光器驱动电路中只有恒流源驱动电路可以做到这一点,实现这种功能是通过改变恒流源电路的基准电压而实现的。
进行恒流源驱动电路的设计的方法是在先仿真的基础上进行的,项目所需要的恒流源驱动电路的设计参数是恒流源输出电流是0-1a可调。
1恒流源软件仿真为了准确地模拟结果,为以后的设计提供理论依据,选用了Ni公司的Multisim10电路模拟软件。
该软件经历了几代人的发展,并不断完善其功能。
它的数据库包含所有常用的组件,这些组件可以模拟模拟电路和数字电路。
其仿真结果精度较高,可以为设计提供设计依据。
恒流源仿真结果恒流源模拟电路选用单电源供电的集成运算放大器lm2900n,功率管irf540,电源电压为9V。
为了测量电路的输出电流,将万用表调整到当前档位,并将其串联到电路上进行测量。
从上图可以看出,所设计的电路非常简单。
集成运算放大器U2B的功能是将采样电阻测量的电压反馈到输入端,并通过集成运算放大器u2a将其与输入端的参考电压进行比较。
恒流源模拟电路是一种经典的恒流源电路,具有电路稳定性高的优点。
该恒流源电路只需调节电阻R3和R3的电阻,在参考电压恒定的情况下,可以方便地调节恒流源的输出电流。
仿真结果显示,当将采样电阻的阻值选为1欧姆、r3r4?13、基准电压选取为2v时,仿真结果得到的电流是1.5a。
在仿真过程中、通过选取不同的基准电压和r3、r3的值可以得到不同的电流值,这样仿真结果为实际的电路设计提供很好参考依据。
为了进一步简化恒流源驱动电路的设计,进行了以下设计和仿真。
选择的电源管为irf530,采样R1的电阻值为1欧姆,选择的电压比较器为单电源供电的装置成运算放大器lm2900n,在电路仿真中,可以看见当基准电压选为1v、采样电阻为1欧姆时,恒流源的输出电流是0.9a,这与理论推导的结果完全一样。
LD型电动单梁起重机技术说明
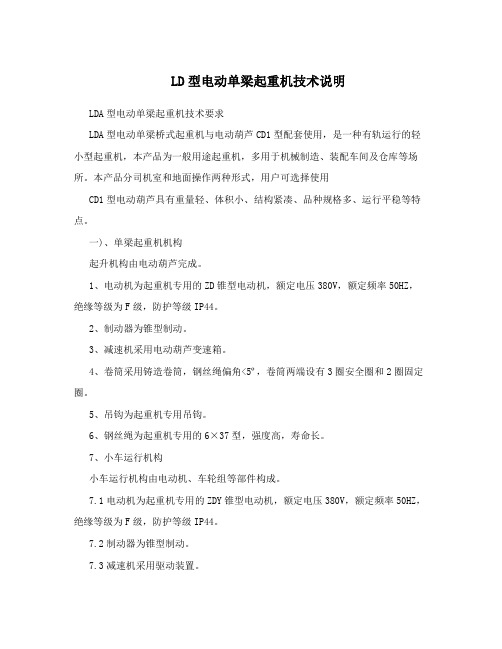
LD型电动单梁起重机技术说明LDA型电动单梁起重机技术要求LDA型电动单梁桥式起重机与电动葫芦CD1型配套使用,是一种有轨运行的轻小型起重机,本产品为一般用途起重机,多用于机械制造、装配车间及仓库等场所。
本产品分司机室和地面操作两种形式,用户可选择使用CD1型电动葫芦具有重量轻、体积小、结构紧凑、品种规格多、运行平稳等特点。
一)、单梁起重机机构起升机构由电动葫芦完成。
1、电动机为起重机专用的ZD锥型电动机,额定电压380V,额定频率50HZ,绝缘等级为F级,防护等级IP44。
2、制动器为锥型制动。
3、减速机采用电动葫芦变速箱。
4、卷筒采用铸造卷筒,钢丝绳偏角<5º,卷筒两端设有3圈安全圈和2圈固定圈。
5、吊钩为起重机专用吊钩。
6、钢丝绳为起重机专用的6×37型,强度高,寿命长。
7、小车运行机构小车运行机构由电动机、车轮组等部件构成。
7.1电动机为起重机专用的ZDY锥型电动机,额定电压380V,额定频率50HZ,绝缘等级为F级,防护等级IP44。
7.2制动器为锥型制动。
7.3减速机采用驱动装置。
7.4车轮为单轮缘。
8、大车运行机构大车运行机构由电动机、变速箱、车轮组等部件构成。
8.1电动机为起重机专用的ZDY锥型电动机,额定电压380V,额定频率50HZ,绝缘等级为F级,防护等级IP44。
8.2制动器为锥型制动8.3减速机采用LD变速箱。
8.4车轮为单轮缘。
二)、电动葫芦机构1、减速机电动葫芦减速器采用斜齿轮三级减速,齿轮及齿轮轴均采用40Cr或20CrMnTi 钢锻制加工,并经热处理,全部用滚动轴承支撑,箱壳用铸铁制造,装配严密,防尘可靠。
2、运行结构2.1电动葫芦的运行机构为电动小车式。
减速齿轮为 40Cr锻制,并经调质处理,装于封闭的减速箱内,全部采用滚动轴承支撑,墙板用钢板制造,保证运转灵活,使用方便,寿命长。
根据起升高度的不同,结构形式也有不同。
2.2运行机构所适用的工字钢轨道应按GB/T706-1998标准选择,起升高度18米以上加平衡梁小车,10吨、16吨以上起升高度6米—30米,采用电动小车二台。
理光复印机错误代码
先给大家介绍一下,代码的解释,然后在给大家说机器的维修方法。
SC320:多面反射镜电机异常-定义-[B]在多面反射镜电机的接通信号发出后20秒内,此电机没有达到它的动作速度,或是在多面反射镜电机停转信号后20秒以上没有检测到卡死信号。
-可能的原因-·多面反射镜电机不良·多面反射镜电机驱动板与BICU板之间接触不良·BICU板不良SC321:没有激光写入信号(F门)的出错1-定义-[B]复印纸到达对位传感器后已超过15秒,激光写入信号(F门)没有成为低电平。
-可能的原因-·BICU板不良·传真机控制器或打印机控制器连接不良·传真机控制器或打印机控制器不良SC322:第1只激光同步信号出错-定义-[B]尽管激光两极管已经导通,主扫描同步检测器板检测不到第1只激光同步信号。
-可能的原因-·激光同步检测器板与LC装置之间连接不良·激光同步检测器板没有正确就位·激光同步检测器板不良·LD装置失败SC323:LD驱动电流过大-定义-[B]LD驱动板加到LD上的电流超过110MA。
-可能的原因-·LD装置失败(因为老化,造成功率不够大)·LD装置与BICU板之间连接不良·BICU不良SC326:第2只激光同步信号出错-定义-[B]尽管激光两极管已经导通,主扫描同步检测器板检测不到第2只激光同步信号。
-可能的原因-·激光同步检测器板与LD装置之间连接不良·激光同步检测器板没有正确就位·激光同步检测器板不良·LD装置失败SC327:LD装置原位置出错1-定义-[B]LD装置移到原位置后,LD装置原位传感器没有检测到导通状态。
-可能的原因-·LD装置原位传感器失败·LD定位电机不良·因为接头走向不良,造成LD装置的移动受阻。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LDA型驱动装置
LDA驱动装置是为电动单梁起重机配套的一种新
型大车驱动装置。
可配套电机有ZDYD21-4-0.8KW,
ZDYD22-4-1.5KW锥形制动电机,或ZDRD100-4-1.5KW
锥形转子绕线制动电机等配套使用。
该装置具有结构简
单,体积小,噪音低,外观大方,使用安全可靠,运行
速度平稳,安装维修方便,起动转矩大,可频繁起动等
优点。
注:若行车地面操作,与实心转子制动(软起动)
电机配套使用最佳。
可供选用驱动速度表
速度20米/分30米/分45米/分60米/分75米/分总速度比58.9539.4226.5119.4415.90
LDH型驱动装置,是以LDA为基础研发的一种新
机型,可与大吨位、大跨度的电动单梁、葫芦双梁、小
型龙门起重机及路桥设备相配套使用,可配套电机
ZDYD21-4-0.8KW,ZDYD22-4-1.5KW锥形制动电机,
或ZDRD系列1.5KW、2.1KW、3.0KW锥形转子绕线
制动电机等配套使用。
该装置集外观大方,使用安全可
靠,运行速度平稳,安装维修方便,可选速度范围广,
起动转矩大,可频繁起动等优点于一身的大车驱动装
置。
注:若行车地面操作,与实心转子制动(软起动)
电机配套使用最佳。
可供选用驱动速度表
速度20米/分30米/分45米/分60米/分75米/分总速度比75.1551.3333.9125.820.86
LDAC型驱动装置
LDAC型驱动装置,是在LDA型的基础上研发的一种新机型,配
套电机与LOD1型驱动装置相同可以配套使用ZDY*21-4-0.8KW锥形转
子制动电机,ZDR100-4-1.5KW锥形转子绕线制动电机。
该装置的优点
是能充分利用场地空间,适用于小型龙门式起重机,具有外观大方,起
动转矩大,可频繁起动等优点于一身的大车驱动装置。
所配套电机本身
还带有制动装置。
是为客户特殊场地、特殊要求而设计的理想机型。
可供选用驱动速度表
速度20米/分30米/分45米/分60米/分75米/分
总速度比58.9539.4226.5119.4415.90
LDHC型驱动装置
LDHC型驱动装置,是我公司在LDH型的基础上研发的一种新机型,
属于我公司专利产品,适用于10-20吨门式半门式起重机。
其配套电
机与LDA型驱动装置相同,可以配套使用ZDY(D)系列0.8KW-1.5KW
锥形转子制动电机或ZDR系列1.5KW、2.1KW、3.0KW锥形转子饶
线制动电机和实心转子(软起动)电机等。
该装置的优点是能充分利用
场地空间,适用于门式起重机,具有外观大方,使用安全可靠,运行
速度平稳,安装维修方便,可选速度范围宽,起动转矩大,可以频繁
起动等优点于一身的大车驱动装置。
所配套电机本身还带有制动装
置,是为客户特殊场地、特殊要求而设计的理想机型。
LDHC型驱动装置安装图(按M7、48齿齿圈设计)
可供选用驱动速度表
速度20米/分30米/分45米/分60米/分75米/分总速度比75.1551.3333.9125.8020.86。