《振动力学》习题集(含答案)
振动力学ch1习题题目

习题 1.8 不计质量的等截面悬臂梁长为 L,抗弯刚度为 EI,自由端有集中质量 m1 和 m2。梁静止时突 然释放质量 m1。试求 m2 的自由振动。
长为 l 的均匀杆及弹簧 K、 阻尼器 C 组成。 习题 1. 9 图示系统由一质量为 m, 试以杆的偏角为广义坐标建立系统的动力学方程,给出存在自由振动的条件。若 在弹簧原长处立即释手, 试求杆的最大振幅和发生时间、 最大角速度和发生时间。 是否发生在过平衡位置时?
习题 1.10 质量 m 2000 kg ,以匀速度 v 0.03m / s 运动,与弹簧 K、阻尼器 C 相撞后 一起作自由振动,如图所示。已知 K 48020N / m , C 1960N s / m 。问质 量 m 在相撞后多少时间达到最大振幅?最大振幅是多大?
1. 11 求图示系统的动力学方程, 并给出存在往复运动的条件。 设 t=0 时质量的位移为 x0, 速度为 v0测某液体的粘度系数 。一等厚薄板质量为 M,面
积为 A,悬挂于弹簧 K 上。先使系统在空气中自由振 动,测得周期为 T1 , (空气阻力忽略不计) 。然后放入被 已知薄板受到的 测液体中作衰减振动, 测得周期为 T2 。 阻尼力 F
2 Av , ( v 为相对速度) ,试证明
习题 1.1 质量为 m 的质点由长度为 l、质量为 m1 的均质细杆约束 在铅垂平面内做微幅摆动,求系统的固有频率。
习题 1.2 质量为 m、半径为 R 的均质柱体在水平面上作无滑 动的微幅滚动,在 CA=a 的 A 点系有两根刚度系数为 k 的水平 弹簧,求系统的固有频率。
习题 1.3 转动惯量为 J 的圆盘由三段抗扭刚度分别为 k1,k2 和 k3 的轴约束, 求系统的固有 频率。
习题 1.4 在图示系统中,已知 ki(i=1,2,3) ,m,a 和 b, 横杆质量不计, 求系统的固有频率。
振动习题

ଵగమ
ൌ
6.21
ൈ
10ିଶ
m时
11-11 有一质点,同时参与 x1 = 5 cos(ωt + 2)cm 和 x2 = 5 cos(ωt + 1)cm 的两个
谐振动(其中时间单位用 s).问这两个振动在任意时刻哪个的相位超前,超前 多少? 答案:振动 1 超前振动 2 的相位;1 rad
11-12 两个同方向的简谐振动,振动方程分别为:
11-6 如图所示,将 9kg 的水银注入 U 形管,U 形管内
直径为 1.2cm.水银在平衡位置附近作振动,(1)证明
水银在管中做简谐振动.(2)求振动周期.提示:1m3
x
x
水银质量为 13600kg,不考虑摩擦力和表面张力的作用.
答案:(1)证明略;(2)3.43s
11-7 一石块在直径为 0.8m 的水平圆周上运动,频率为 30r/min.远处射来的光束将此石块投影到附近墙壁上, 求投影运动的振幅、频率及周期. 答案:0.4m,0.5Hz,2s
11-10 在一平板上放一质量为݉ ൌ 1 kg的物体,平板在竖直方向作简谐振动,其
振动周期为ܶ
ൌ
ଵ ଶ
s,振幅ܣ
ൌ
4
cm,求:
(1)物体对平板的压力ܰ的表达式;
(2)平板以多大的振幅振动时,物体才能离开平板?(注意取݃ ൌ 9.8 N/kg)
答案:(1)ܰ
ൌ
െ9.8
െ
0.64ߨଶ
cosሺ4ߨݐሻ;(2)当振幅ܣ
O
O
P
P′
R
R
(a)
(b)
题 图 11-17
题 图 12-4
11-8 质量为 36kg 的物体做振幅为 13cm,周期为 12s 的简谐振动.在 ݐൌ 0时, 位移为+13cm.(1)求在 ݔൌ 5 cm处,物体的速度,(2)求 ݐൌ 2 s时物体所受力 的大小. 答案:(1)േ6.28 cm/s,(2)0.64N
振动物理力学答案
第九章 振动思考题9.1 什么叫作简谐振动?如某物理量x 的变化规律满足)cos(q pt A x +=,A 、p 、q 均为常数,能否说x 作简谐振动?答:物体(质点或刚体)在线性回复力或线性回复力矩作用下,围绕平衡位置的往复运动叫作简谐振动。
可由动力学方程或运动学方程加上一定的附加条件来定义:若物体相对平衡位置的位移(角位移)x 满足动力学方程 02022=+x dtx d ω,且0ω由振动系统本身性质决定时,则物体作简谐振动;若物体相对平衡位置的位移(角位移)x 满足运动学方程 )c o s (0αω+=t A x ,且0ω由振动系统本身性质决定,A 、ϕ由初始条件决定的常数时,则物体作简谐振动。
以0x 和x v 0分别表示0=t 时物体的初始位移和初始速度,则式中 20202ωxv x A +=;α可由A x 0cos =α、A v x 00sin ωα-=和000x vtg x ωα-=三式中的任意两个来决定。
上述运动学方程是动力学方程(微分方程)的解,A 、ϕ是求解时的待定积分常数。
三个定义在力学范围内是等价的,动力学方程更具普遍性。
可用三个定义中的任何一个来判断物体的运动是否简谐振动。
如某物理量x 的变化规律满足)cos(q pt A x +=,A 、p 、q 均为常数,不能说x 作简谐振动。
因为常数p 必须是由振动系统本身性质决定的固有频率,并且A 、q 是由系统初始条件决定的常数时,才可以说x 作简谐振动。
9.2 如果单摆的摆角很大,以致不能认为θθ=sin ,为什么它的摆动不是简谐振动? 答:对质量为m 的摆球,当摆角θ很大时,θθ≠sin ,其切向力θθτ⋅-≠-=mg mg f sin ,不是角位移θ的线性回复力。
由牛顿定律得:θθsin )(22mg dt l d m -=即 0sin 22=+θθl gdtd 令l g =2ω,有 0sin 2022=+θωθdtd 因此,动力学方程是非线性微分方程,其解不再为余弦函数,不满足简谐振动的定义。
大学物理振动习题含答案
一、选择题:1.3001:把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度θ ,然后由静止放手任其振动,从放手时开始计时。
若用余弦函数表示其运动方程,则该单摆振动的初相为(A) π (B) π/2 (C) 0 (D) θ [ ]2.3002:两个质点各自作简谐振动,它们的振幅相同、周期相同。
第一个质点的振动方程为x 1 = A cos(ωt + α)。
当第一个质点从相对于其平衡位置的正位移处回到平衡位置时,第二个质点正在最大正位移处。
则第二个质点的振动方程为:(A))π21cos(2++=αωt A x (B) )π21cos(2-+=αωt A x (C))π23cos(2-+=αωt A x (D) )cos(2π++=αωt A x [ ]3.3007:一质量为m 的物体挂在劲度系数为k 的轻弹簧下面,振动角频率为ω。
若把此弹簧分割成二等份,将物体m 挂在分割后的一根弹簧上,则振动角频率是(A) 2 ω (B) ω2 (C) 2/ω (D) ω /2 [ ]4.3396:一质点作简谐振动。
其运动速度与时间的曲线如图所示。
若质点的振动规律用余弦函数描述,则其初相应为 (A) π/6 (B) 5π/6 (C) -5π/6 (D) -π/6 (E) -2π/3 [ ]5.3552:一个弹簧振子和一个单摆(只考虑小幅度摆动),在地面上的固有振动周期分别为T 1和T 2。
将它们拿到月球上去,相应的周期分别为1T '和2T '。
则有(A) 11T T >'且22T T >' (B) 11T T <'且22T T <'(C) 11T T ='且22T T =' (D) 11T T ='且22T T >' [ ] 6.5178:一质点沿x 轴作简谐振动,振动方程为)312cos(1042π+π⨯=-t x (SI)。
(完整版)振动力学试题

1.转动惯量为J 的圆盘由三段抗扭刚度分别为1k 、2k 和3k 的轴约束,如图所示。
求系统的固有频率。
解:系统的动能为 221•=θJ T2k 和3k 相当于串联,则 32θθθ+= 3322θθk k =联立以上两式得 θθ3232k k k +=θθ3223k k k +=系统的势能为 ()[]223322221323232121212121θθθθk k k k k k k k k k U +++=++=利用θωθn =•和U T =可得 ()()3232132n k k J k k k k k +++=ω2.面积为S ,质量为m 的薄板连接于弹簧下端,在粘性流体中振动,如图所示。
作用于薄板的阻尼力为νμS F d 2=,S 2为薄板总面积,ν为速度。
若测得薄板无阻尼自由振动的周期为0T ,在粘性流体中自由振动的周期为d T 。
求系数μ。
解:平面在液体中上下振动时:02=++•••kx x S x m μ dn d n T T m k πξωωπω2-1,220====kS m S m S n n 222,22μξωμξξωμ==⇒= kS k 222--1μξ=2020220-2-22T T T ST mk S k T T T T d dd πμμ=⇒=3.如图所示均匀刚性杆质量为1m ,求系统的频率方程。
解:先求刚度矩阵。
令0x 1,==θ得:22212111a k b k a a k b b k k +=⋅+⋅=b k 221-k =令1,0==x θ得:a k k 212-=222-k k =则刚度矩阵为:⎥⎦⎤⎢⎣⎡+=2222221--k ak a k a k b k K再求质量矩阵。
令0,1==••••x θ ,得:0,31212111==m a m m令1,0==••••x θ,得:22212,0m m m ==则质量矩阵为: ⎥⎥⎦⎤⎢⎢⎣⎡=2210031m a m M故频率方程为: 0-2=M K ω4.在图所示系统中,已知m 和k 。
振动力学课程作业
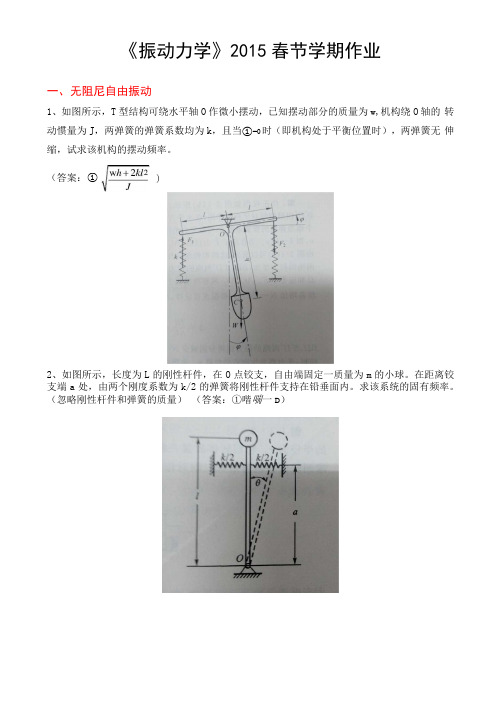
《振动力学》2015春节学期作业一、无阻尼自由振动1、如图所示,T型结构可绕水平轴O作微小摆动,已知摆动部分的质量为w,机构绕O轴的转动惯量为J,两弹簧的弹簧系数均为k,且当①=0时(即机构处于平衡位置时),两弹簧无伸缩,试求该机构的摆动频率。
2、如图所示,长度为L的刚性杆件,在O点铰支,自由端固定一质量为m的小球。
在距离铰支端a处,由两个刚度系数为k/2的弹簧将刚性杆件支持在铅垂面内。
求该系统的固有频率。
(忽略刚性杆件和弹簧的质量)(答案:①喈喘一D)(答案:①=)3、如图所示,悬臂梁长为L,截面抗弯刚度为EI,梁的自由端有质量为m 的质量块,弹簧刚 度为k ,求系统的固有频率。
4、如图所示,半径为R 的均质半圆柱体,在水平面内只作滚动而不滑动的微摆动,求其固有 角频率。
(答案:①)君篇5、如图所示,抗弯刚度为EI = 30义106(N ・m 2)的梁AB ,借弹簧支撑于A,B 两点处,弹簧系数均为k = 300(N / m )。
忽略梁的质量,试求位于B 点左边3m 处,重量为W = 1000(N )的物块自由振动的周期。
(答案:T=0.533s )借助四根端点嵌固的竖置管柱支撑着。
每根柱子的长为L,抗弯刚度为 EI 。
试求该水箱顺水平方向自由振动的周期。
(管柱的质量忽略不计) 6、一个重W 的水箱, (答案:)(答案:T = 2)1、如图所示,库伦曾用下述方法测定液体的粘性系数c ':在弹簧上悬挂一薄板A ,先测出薄板在空气中 的振动周期J 然后测出在待测粘性系数的液体中的振动周期「设液体对薄板的阻力等于2A c ′ -其 中2A 为薄板的表面面积,v 为薄板的速度。
如薄板重W ,试有测得的数据T 和T 2,求出粘性系数c 。
空 气对薄板的阻力不计。
»2 冗 W 二~~—(答案:C ’二祈口22 一 T :)12(答案:196Ns/m )3、挂在弹簧下端的物体,质量为1.96kg ,弹簧常数k=0.49N/cm,阻尼系数c=0.196Ns/cm 。
振动力学(倪振华)
6
而大多数情况下, 振动会产生不良、甚至严 重、灾难性的后果。 由于振动, 降低了机器的动态精度和其它使 用性能; 由于振动, 机器在使用过程中产生巨大的反 复变动的荷载, 导致使用寿命的降低; 有时候振动甚至酿成灾难性事故, 如大桥因 共振而倒塌, 烟囱因风振而倾倒, 飞机因颤振而 坠落等等。
通常系统设计要依赖于响应分析, 所以在实际工作中,响应分析和系统设 计这两个问题是交替进行的。
第1 章 导 论
13
(3)系统识别 已知振动系统的激励(输入)和响应(输出)求系
统参数,以便了解系统的特性。 系统识别包括物理参数识别(确定系统的物理
参数:质量、刚度、阻尼等)和模态参数识别(确定 或估计系统的固有特性:固有频率、振型等)。 (4)环境预测
确定性激励下的响应不一定是确定的 ,但随机激励下的响应一定是随机的。
第1 章 导 论
10
2. 工程振动分析的类别 振动分析:研究振动系统、激励(输入)和
响应(输出)三者之间的关系。
理论上讲,只要知道两者就可以确定第 三 者 。 这样,工程振动分析所要解决的问题 可以归纳为下面几类。
第1 章 导 论
周期的倒数称为频率,是系统每秒钟振动 的次数,单位为1/秒(1/s)或赫兹(Hz)。记作 f
f 1 n T 2
第2章 单自由度系统自由振动
2.2 自由振动系统
35
固有频率n和频率 f 只相差常数2,因
此经常通称为固有频率。是振动分析中极
其重要的参数。
显然
n
2
T
2
f
因此n的物理意义是在2时间内振动的
第2章 单自由度系统自由振动
2.2 自由振动系统
24
m-k系统的自由振动 (P6) m-k 系 统 虽 然 非 常 简 单 ,
(完整版)大学物理振动习题含答案
一、选择题:1.3001:把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度θ ,然后由静止放手任其振动,从放手时开始计时。
若用余弦函数表示其运动方程,则该单摆振动的初相为(A) π (B) π/2 (C) 0 (D) θ [ ]2.3002:两个质点各自作简谐振动,它们的振幅相同、周期相同。
第一个质点的振动方程为x 1 = A cos(ωt + α)。
当第一个质点从相对于其平衡位置的正位移处回到平衡位置时,第二个质点正在最大正位移处。
则第二个质点的振动方程为:(A))π21cos(2++=αωt A x (B) )π21cos(2-+=αωt A x (C))π23cos(2-+=αωt A x (D) )cos(2π++=αωt A x [ ]3.3007:一质量为m 的物体挂在劲度系数为k 的轻弹簧下面,振动角频率为ω。
若把此弹簧分割成二等份,将物体m 挂在分割后的一根弹簧上,则振动角频率是(A) 2 ω (B) ω2 (C) 2/ω (D) ω /2 [ ]4.3396:一质点作简谐振动。
其运动速度与时间的曲线如图所示。
若质点的振动规律用余弦函数描述,则其初相应为 (A) π/6 (B) 5π/6 (C) -5π/6 (D) -π/6 (E) -2π/3 [ ]5.3552:一个弹簧振子和一个单摆(只考虑小幅度摆动),在地面上的固有振动周期分别为T 1和T 2。
将它们拿到月球上去,相应的周期分别为1T '和2T '。
则有(A) 11T T >'且22T T >' (B) 11T T <'且22T T <'(C) 11T T ='且22T T =' (D) 11T T ='且22T T >' [ ] 6.5178:一质点沿x 轴作简谐振动,振动方程为)312cos(1042π+π⨯=-t x (SI)。
振动力学试题
1、质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅垂平面内作微幅摆动,如图所示。
求系统的固有频率。
2、质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。
求系统的固有频率。
3、图T 2-11所示是一个倒置的摆。
摆球质量为m ,刚杆质量可忽略,每个弹簧的刚度为2k。
求倒摆作微幅振动时的固有频率。
4、转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图所示。
求系统的固有频率。
5、在图所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
求固有频率。
6、如图所示,刚性曲臂绕支点的转动惯量为I 0,求系统的固有频率。
mg baa F +=2 x x 27、求图T 2-10所示系统的固有频率,刚性杆的质量忽略不计。
8、求图中系统的固有频率,悬臂梁端点的刚度分别是1k 及3k ,悬臂梁的质量忽略不计。
9、一种位移计的结构如图2-7所示。
质量块重W ,摇臂AB 绕支点O 的转动惯量为I,x 1x A两个弹簧的刚度为1k 及2k ,求系统的固有频率。
cbB O Wk 1k 2A10、用近似估算的方法(瑞利法)计算图所示系统的基频。
11、如图所示,重物1W 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2W 从高度为h 处自由下落到1W 上而无弹跳。
求2W 下降的最大距离和两物体碰撞后的运动规律。
12、图所示的系统中,四个弹簧均未受力,k 1= k 2= k 3= k 4= k ,试问:(1)若将支承缓慢撤去,质量块将下落多少距离? (2)若将支承突然撤去,质量块又将下落多少距离?khW 2W 113、质量1m 在倾角为α的光滑斜面上从高h 处滑下无反弹碰撞质量2m ,如图所示。
确定系统由此产生的自由振动。
14、一长度为l 、质量为m 的均匀刚性杆铰接于O 点并以弹簧和粘性阻尼器支承,如图T 2-24所示。
振动力学考题集[]
1、四个振动系统中,自由度为无限大的就是( )。
A、单摆;B、质量-弹簧;C、匀质弹性杆;D、无质量弹性梁;2、两个分别为c1、c2的阻尼原件,并连后其等效阻尼就是( )。
A、c1+c2;B、c1c2/(c1+c2);C、c1-c2;D、c2-c1;3、( )的振动系统存在为0的固有频率。
A、有未约束自由度;B、自由度大于0;C、自由度大于1;D、自由度无限多;4、多自由度振动系统中,质量矩阵元素的量纲应该就是( )。
A、相同的,且都就是质量;B、相同的,且都就是转动惯量;C、相同的,且都就是密度;D、可以就是不同的;5、等幅简谐激励的单自由度弹簧-小阻尼-质量振动系统,激励频率( )固有频率时,稳态位移响应幅值最大。
A、等于;B、稍大于;C、稍小于 ;D、为0;6、自由度为n的振动系统,且没有重合的固有频率,其固有频率的数目(A )。
A、为n;B、为1;C、大于n;D、小于n;7、无阻尼振动系统两个不同的振型u(r)与u(s),u(r)T Mu(s)的值一定( )。
A、大于0;B、等于0;C、小于0;D、不能确定;8、无阻尼振动系统的某振型u(r),u(r)T Ku(r)的值一定( )。
A、大于0;B、等于0;C、小于0;D、不能确定;9、如果简谐激励力作用在无约束振动系统的某集中质量上,当激励频率为无限大时,该集中质量的稳态位移响应一定( )。
A、大于0;B、等于0;C、为无穷大;D、为一常数值;10、相邻固有频率之间的间隔呈近似无限等差数列的振动系统就是( )。
A、杆的纵向振动;B、弦的横向振动;C、一般无限多自由度系统;D、梁的横向振动;11、两个刚度分别为k1、k2串连的弹簧,其等效刚度就是( )。
A、k1+k2;B、k1k2/(k1+k2);C、k1-k2;D、k2-k1;12、 无阻尼振动系统两个不同的振型u (r )与u (s ),u (r )T Ku (s )的值一定( )。
A 、 大于0;B 、 等于0;C 、 小于0;D 、 不能确定;13、 无阻尼振动系统的某振型u (r ),u (r )T Mu (r )的值一定( )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《振动力学》习题集(含答案)1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
图E1.1解: 系统的动能为:()222121x I l x m T +=其中I 为杆关于铰点的转动惯量:2102120131l m dx x l m x dx l m I l l ⎰⎰==⎪⎭⎫⎝⎛=则有:()221221223616121x l m m x l m x ml T +=+=系统的势能为:()()()2121212414121 cos 12cos 1glx m m glx m mglx x lg m x mgl U +=+=-⋅+-=利用x xn ω= 和U T =可得: ()()lm m gm m n 113223++=ω1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。
求系统的固有频率。
图E1.2解:如图,令θ为柱体的转角,则系统的动能和势能分别为:22222243212121θθθ mR mR mR I T B =⎪⎭⎫ ⎝⎛+==()[]()222212θθa R k a R k U +=+⋅=利用θωθn= 和U T =可得: ()mkR a R mR a R k n 343422+=+=ω1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3解: 系统的动能为:221θ J T =2k 和3k 相当于串联,则有:332232 , θθθθθk k =+=以上两式联立可得:θθθθ32233232 , k k k k k k +=+=系统的势能为:()232323212332222*********θθθθ⎥⎦⎤⎢⎣⎡+++=++=k k k k k k k k k k U利用θωθn= 和U T =可得: ()()3232132k k J k k k k k n +++=ω1.4 在图E1.4所示的系统中,已知()b a m i k i , ,3,2,1 和=,横杆质量不计。
求固有频率。
图E1.4答案图E1.4解: 对m 进行受力分析可得:33x k mg =,即33k mgx =如图可得:()()22221111 ,k b a mga k F x k b a mgb k F x +==+==()()mg k k b a k b k a b a x x a x x x x 212221212110++=+-+='+=()mg k mg k k k b a k b k a x x x 0321222123011=⎥⎦⎤⎢⎣⎡+++=+=则等效弹簧刚度为:()()2123223123212k k b a k k b k k a k k k b a k e ++++= 则固有频率为:()()()[]222132212321bk a k k b a k k m b a k k k m k e n ++++==ωmg ba a F +=2x x 21.7 质量1m 在倾角为α的光滑斜面上从高h 处滑下无反弹碰撞质量2m ,如图E1.7所示。
确定系统由此产生的自由振动。
图E1.7答案图E1.7解:对1m 由能量守恒可得(其中1v 的方向为沿斜面向下):211121v m gh m =,即gh v 21=对整个系统由动量守恒可得:()02111v m m v m +=,即gh m m m v 22110+=令2m 引起的静变形为2x ,则有:22sin kx g m =α,即kg m x αsin 22=令1m +2m 引起的静变形为12x ,同理有:()k g m m x αsin 2112+=得:kg m x x x αsin 12120=-=则系统的自由振动可表示为:t xt x x n nn ωωωsin cos 00 +=其中系统的固有频率为:21m m kn +=ω注意到0v 与x 方向相反,得系统的自由振动为:t v t x x n nn ωωωsin cos 00-=1.9 质量为m 、长为l 的均质杆和弹簧k 及阻尼器c 构成振动系统,如图E1.9所示。
以杆偏角θ为广义坐标,建立系统的动力学方程,给出存在自由振动的条件。
若在弹簧原长处立即释手,问杆的最大振幅是多少?发生在何时?最大角速度是多少?发生在何时?是否在过静平衡位置时?图E1.9答案图E1.9解: 利用动量矩定理得:l l c a a k I ⋅-⋅-=θθθ, 231ml I =033222=++θθθka cl ml , 223mlka n =ωn ml cl ξω2322=, 32 1123mkl a c m c n <⇒<⋅=ωξa a k lmg ⋅=⋅02θ, 202ka mgl=θ1.12 面积为S 、质量为m 的薄板连接于弹簧下端,在粘性流体中振动,如图E1.12所示。
作用于薄板的阻尼力为Sv F d 2μ=,2S 为薄板总面积,v 为速度。
若测得薄板无阻尼自由振动的周期为0T ,在粘性流体中自由振动的周期为d T 。
求系数μ。
l c图E1.12解: 平面在液体中上下振动时:02=++kx x S xm μ2T m k n πω==, dn d T πξωω212=-=n n m S m S ωμξξωμ=⇒= 22, kS 222μξ=kS k 2221μξ-=-2020220222T T T ST mk S k T T d dd -=⇒-=πμμππ2.1 图E2.2所示系统中,已知m ,c ,1k ,2k ,0F 和ω。
求系统动力学方程和稳态响应。
图E2.1答案图E2.1(a) 答案图E2.1(b)解:等价于分别为1x 和2x 的响应之和。
先考虑1x ,此时右端固结,系统等价为图(a ),受力为图(b ),故:()()x c x k x c c x k k xm 112121+=++++ t A c A k kx x c xm 1111111cos sin ωωω+=++(1)21c c c +=,21k k k +=,mk k n 21+=ω (1)的解可参照释义(2.56),为:()()()()()()()22211111222111121cos 21sin s s t kA c s s t kA k t Y ξθωωξθω+--++--=(2)其中:n s ωω1=,21112ss tg -=-ξθ ()()()212122122122112121k k c c k k k k c s ++++=⎪⎪⎭⎫⎝⎛++=+ωωξ()()()()()21212212212122112122121222 121k k c c m k kk k c c k k m s s +++-+=⎥⎦⎤⎢⎣⎡+++⎪⎪⎭⎫ ⎝⎛+-=+-ωωωωξ故(2)为:()()()()()()()()211212212212121212112122122121111111111sin cos sin θθωωωωωωθωωθω+-++-++=++-+-+-=t c c m k kc k A c c m k k t A ct A k t xx k 2x2 (11x k - )11x xc -1()()m k k c c tg k k m k k c tg s s tg 2121121121212111211112ωωωωξθ-++=+-+=-=--- 11112k c tg ωθ-=考虑到()t x 2的影响,则叠加后的()t x 为:()()()()⎪⎪⎭⎫ ⎝⎛+-++-++-++=--=∑i i i i i i i i i i i i i k c tg m k k c c tg t c c m k k c k A t x ωωωωωωω12212112122212221222sin2.1 一弹簧质量系统沿光滑斜面作自由振动,如图T 2-1所示。
已知,︒=30α,m = 1 kg ,k = 49 N/cm ,开始运动时弹簧无伸长,速度为零,求系统的运动规律。
图 T 2-1答案图 T 2-1解:0sin kx mg =α,1.049218.91sin 0=⨯⨯==kmg x αcm70110492=⨯==-m k n ωrad/st t x x n 70cos 1.0cos 0-==ωcm2.2 如图T 2-2所示,重物1W 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物2W 从高度为h 处自由下落到1W 上而无弹跳。
求2W 下降的最大距离和两物体碰撞后的运动规律。
图 T 2-2答案图 T 2-2解:222221v gW h W =,gh v 22=动量守恒:122122v gW W v g W +=,gh W W W v 221212+=平衡位置:11kx W =,kW x 11=1221kx W W =+,kW W x 2112+=故:kW x x x 21120=-= ()2121W W kgg W W k n +=+=ω故:tv t x txt x x n nn n nn ωωωωωωsin cos sin cos 12000+-=+-=W 2W 12.4 在图E2.4所示系统中,已知m ,1k ,2k ,0F 和ω,初始时物块静止且两弹簧均为原长。
求物块运动规律。
图E2.4答案图E2.4解:取坐标轴1x 和2x ,对连接点A 列平衡方程:()0sin 012211=+-+-t F x x k x k ω即:()t F x k x k k ωsin 022121+=+(1)对m 列运动微分方程:()1222x x k xm --=即:12222x k x k xm =+ (2)由(1),(2)消去1x 得:t k k kF x k k k k xm ωsin 2120221212+=++(3)故:()21212k k m k k n +=ω由(3)得:()()()⎪⎪⎭⎫ ⎝⎛--+=t t k k m k F t x n n n ωωωωωωsin sin 22212022.5在图E2.3所示系统中,已知m ,c ,k ,0F 和ω,且t =0时,0x x =,0v x= ,求系x k)1x x k - 2xm (2k2统响应。
验证系统响应为对初值的响应和零初值下对激励力响应的叠加。
图E2.3解:()()()θωωωξω-++=-t A t D t C e t x d d t cos sin cos 0()()2220211s s kF A ξ+-⋅=,2112sstg-=-ξθ ()θθcos cos 000A x C A C x x -=⇒+==()()()()θωωωωωωωωξωξωξω--+-++-=--t A t D t C et D t C e t x d d d d td d t sin cos sin sin cos 000()ddd A Cv D A D C v xωθωωξωθωωξωsin sin 00000-+=⇒++-==求出C ,D 后,代入上面第一个方程即可得。