雷达天线俯仰控制及威力显示系统的设计
雷达阵列天线介绍
■开课目的“阵列天线分析与综合”是电子信息工程专业电磁场与微波通信方向的专业选修课程。
课程的任务是使学生掌握阵列天线的基本理论、基本分析与综合方法,掌握单脉冲阵列、相控阵扫描天线的基本理论和概念、以及阵列天线的优化设计思想,培养学生分析问题和解决问题的能力,为今后从事天线理论研究、工程设计和开发工作打下良好的基础。
■课程要求●约有五次作业●考核平时成绩占20%。
包括平时作业,出勤情况。
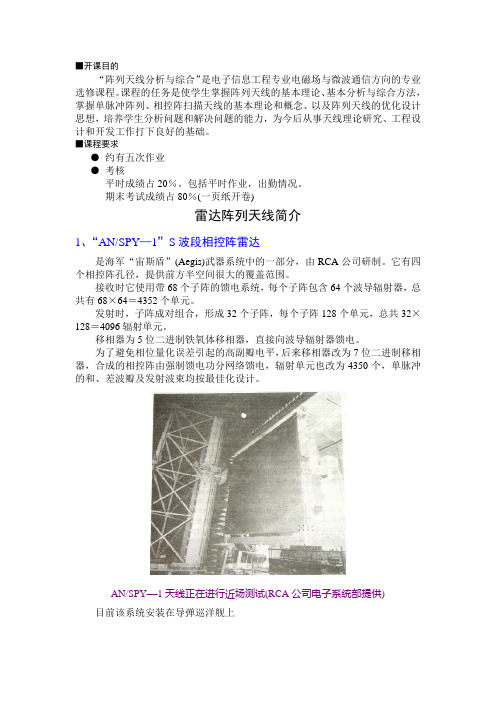
期末考试成绩占80%(一页纸开卷)雷达阵列天线简介1、“AN/SPY—1”S波段相控阵雷达是海军“宙斯盾”(Aegis)武器系统中的一部分,由RCA公司研制。
它有四个相控阵孔径,提供前方半空间很大的覆盖范围。
接收时它使用带68个子阵的馈电系统,每个子阵包含64个波导辐射器,总共有68×64=4352个单元。
发射时,子阵成对组合,形成32个子阵,每个子阵128个单元,总共32×128=4096辐射单元。
移相器为5位二进制铁氧体移相器,直接向波导辐射器馈电。
为了避免相位量化误差引起的高副瓣电平,后来移相器改为7位二进制移相器,合成的相控阵由强制馈电功分网络馈电,辐射单元也改为4350个,单脉冲的和、差波瓣及发射波束均按最佳化设计。
AN/SPY—1天线正在进行近场测试(RCA公司电子系统部提供)目前该系统安装在导弹巡洋舰上导弹巡洋舰上的AN/SPY—1系统2、爱国者(PATRIOT)多功能相控阵雷达是Raytheon公司为陆军研制的一种多功能相控阵雷达系统。
其天线系统使用光学馈电的透镜阵列形式。
和差波瓣分别通过单脉冲馈源达到最佳。
孔径呈圆形,包含大约5000个单元,采用4位二进制铁氧体移相器和波导型辐射器单元。
它安装在车辆上,并可平叠以便于运输。
爱国者多功能相控阵雷达天线(Raytheon公司提供)3、机载预警和控制系统(AW ACS)世界上第一个具有超低副瓣的作战雷达天线是由西屋电气公司为AWACS 系统研制的。
经典雷达资料-第22章 天基雷达(SBR)系统和技术-2

SBR系统的优缺点当传感器要完成探测太空、海洋和空中目标任务及完成导弹防御任务时,可考虑使用SBR。
与陆基雷达相比,这些部署在太空的雷达具有以下优点:(1)空间和时间覆盖范围仅受选定的轨道和卫星的数目限制。
如图22.9和图22.10所示。
大范围的连续观测是可以实现的[28]。
图22.9标明了从圆形极地轨道上提供连续覆盖整个地球表面所需要的轨道平面数量和卫星数量。
可以看出,当卫星的高度大于6 000n mile时,需要在两个轨道平面上使用6颗卫星,在卫星探测范围内没有天底孔。
图22.10说明了在赤道轨道的特殊情况下,实现连续覆盖所需要求卫星的数量。
这种情形仅限于扩展到图中所指定纬度的宽条形区,可看出:当卫星的高度大于6 000n mile时,4颗卫星能够覆盖一条60 宽的条形区。
时间上的覆盖范围如图22.11所示。
图中给出了目标被跟踪以后从太空卫星观测地面目标的最大时间[28],可以看出,当轨道高度为6 000n mile时,一个地面目标能被观测的时间超过7 000s。
图22.9 极地轨道的全球覆盖[28]图22.10 赤道轨道的带状覆盖图[28](2)使用电子扫瞄天线的SBR是可以完成多种任务的。
例如,一个雷达卫星系统能:第22章天基雷达(SBR)系统和技术·838·①搜索一个扇区,完全覆盖美国本土周围的防御区域,探测距海岸一定距离的轰炸机;②搜索一个覆盖极地的扇区以便在弹道导弹早期预警系统(BMEWS)发现之前发现洲际弹道导弹(ICBM);③监视任何国外潜在的太空发射场地;④完成海洋地区的监视;⑤搜索一个海基弹道导弹(SLBM)防御区域;⑥探测可能对美国同步卫星构成威胁的太空目标。
任务的数量仅受限于重量和可用的主电源,但当采用航天飞机作为发射装置时,这些限制都能克服。
因此惟独技术和成本才是真正的限制。
(3)大气传播影响可以通过适当选择工作频率和有利的几何关系使之最小化。
(4)如果数据经中继卫星获得,就不需要海外工作站。
(整理)经典雷达资料-第6章__反射面天线 (2)

第6章反射面天线Helmut E. SchrankGary E. EvansDaniel Davis6.1 引言天线的作用雷达天线的基本作用是实现电磁波的自由空间传播和导波传播之间的转换。
发射期间天线的特定功能是将辐射能集中到具有某种形状的定向波束内,以照射指定方向的目标。
接收期间天线收集目标反射的回波信号能量并将之送往接收机。
因此,在以发射方式和接收方式工作时,雷达天线起到互易的,然而是相互关联的作用。
在两种方式或者作用中主要的目的都是要精确确定目标的方向角。
为实现此目的,需要有高度定向的(窄的)波束,从而不仅达到所需的角精度,而且能够分辨相互靠得很近的目标。
雷达天线的这一重要特性可以定量的用波束宽度来表示,也可以表示为发射增益和有效接收孔径。
后两个参量相互成正比,并且与检测距离和角精度有直接关系。
许多雷达都设计成工作在微波频率,这时用适当物理尺寸的天线就能获得窄的波束宽度。
以上雷达天线的功能性描述意味着一副天线既用于发射,又用于接收。
虽然大多数雷达系统都是这样工作的,但是也有例外,如一些单基地雷达采用收发分离的天线,当然,双基地雷达按定义必定是收发分离的天线。
在这一章中,重点介绍较常用的单部天线,特别是广泛使用的反射面天线。
相控阵天线的内容参见第7章。
波束扫描与目标跟踪由于雷达天线一般具有定向波束,大范围的角度覆盖要求窄波束快速往复地在空域内扫描,以保证不论目标在哪个方向上都能探测到。
这就是警戒雷达或搜索雷达的功能。
有些雷达系统设计成一旦探测到目标便可进行跟踪,这种跟踪功能要求专门设计与警戒雷达天线不同的天线。
在某些雷达系统中,特别是在机载雷达中,将天线设计成既具有搜索又有跟踪的功能。
测高大多数警戒雷达都是二维坐标的,只测定目标的距离和方位坐标。
在早期的雷达系统中,另外的测高天线通过机械俯仰摆动来测量第三个坐标,即仰角,由此计算出空中目标的高度。
现在设计的3D雷达采用一副天线测量所有三个坐标,例如,一部天线在接收方式工作时在俯仰方向形成多个堆积波束,而在发射方式工作时形成宽覆盖的垂直波束。
《雷达定位与导航》课件

3 方位测量
雷达利用天线的旋转或 相控阵技术来确定目标 的方位角。
雷达定位的应用领域
军事
雷达在军事领域中用于目标探测、目标跟踪 和导弹制导等方面。
航空
雷达在航空领域中用于飞行管制、地面导航 和防撞系统等。
气象
雷达可以检测大气中的降水、雷暴等天气现 象,用于气象预报和监测。
海洋
雷达可用于海洋中的船舶定位、海上目标探 测和导航等。
雷达导航的应用领域
航天
雷达导航在航天领域中用于卫星定位和航天 器导航。
航空
雷达导航在航空领域中用于飞行导航和空中 交通管制。
航海
雷达导航在航海领域中用于船舶定位和海上 导航。
陆地
雷达导航在陆地领域中用于车辆导航和位置 服务等。
雷达导航系统的组成
1 定位器件
包括雷达天线、传感器 和接系统通过卫星和地面设备共同工作,实现全球范围的导航和定位功 能。
卫星导航系统的发展历程
1
GPS系统
美国开发的全球定位系统,成为卫星
GLONASS系统
2
导航的先驱。
俄罗斯开发的全球卫星导航系统。
3
北斗系统
中国开发的全球卫星导航系统。
雷达信号处理器
用于对雷达信号进行处理和分 析的装置。
雷达信号处理技术概述
雷达信号处理技术包括目标检测、滤波、参数估计和图像重建等方面,旨在 提取目标信息并实现目标定位与跟踪。
雷达信号处理的主要方法
1
雷达脉冲压缩
通过信号处理方法,压缩脉冲雷达接收信号,提高距离和速度分辨率。
2
自适应波束形成
根据环境和目标情况,实时调整雷达天线的发射和接收模式,实现波束的优化。
雷达定位的分类
雷达系统PPT课件

(1)脉冲雷达方程
设Pt为雷达系统的发射功率,Gt为雷达天线增益,Gr 为雷达天线增益,目标的等效反射截面为RCS, Pt为雷 达发射功率,Rt为目标与雷达之间的距离,Lt为雷达的发 射机馈线损耗,Lr为雷达的接收馈线损耗。
雷达系统接收功率Prs:
Prs
PtGtGr2 •RCS (4)3Rt4Lt Lr
目标的运动速度测定:当目标和雷达之间存在着相对位 置运动时,目标回波的频率就会发生改变,频率的改变 量称为多普勒频移,据此确定目标的相对径向速度。
14
雷 地面雷达:高塔、车、船、地基等为雷达平台
达 平
空载雷达:飞机、导弹、气球、飞艇等
台 天基雷达:卫星、飞船、空间站、航天飞机等
电磁波的特性:
15
1.4 雷达系统的基本方程
P jG jK jP tG t4 •R R C t4S•R 2 j •G G t(t )•L p o lL L tjL f
自卫式干扰 (Rt=Rj,Gt=Gt(θ)):
Kj
4PjGjR2j • Lt
PtGt •RCS LpolLjLf
PjGj KjPt4GtR •2 jRCS•LpolL LtjLf 21
以FPGA和宽带 ADC器件为核心构 成的宽带雷达信号
处理系统
以高速DSP器件为 核心构成的雷达
信号处理系统
11
(5) T/R组件
微波光子 收发组件
A320系列飞机气象雷达系统
A320系列飞机气象雷达系统介绍及机组操作建议概述:机载气象雷达系统(WXR)用于在飞行中实时地探测飞机前方航路上的危险气象区域,以选择安全的航路,保障飞行的舒适和安全。
机载气象雷达系统可以探测飞机前方的降水、湍流情况,也可以探测飞机前下方的地形情况。
在显示器上用不同的颜色来表示降水的密度和地形情况。
新型的气象雷达系统还具有预测风切变(PWS)功能,可以探测飞机前方风切变情况,使飞机在起飞、着陆阶段更安全。
本文主要针对我公司A320系列飞机机载气象雷达系统的组成、工作原理、显示特点及我公司A320系列飞机气象雷达的种类和机组操作建议进行了介绍。
一、机载气象雷达系统的组成机载气象雷达系统的基本组成由:雷达收发机、雷达天线、显示器、控制面板和波导系统等,如图1-1所示:雷达收发机:用来产生发射射频脉冲信号和接收并处理射频回波信号,提供气象、湍流和地形等显示数据,探测风切变事件并向机组发送警告和告诫信息。
雷达天线:用来产生高3.6°、宽3.4°的波束并接收回波信号。
天线的稳定性受惯性基准组件(IRU)的俯仰和横滚数据控制。
显示器:对于A319/A320/A321飞机来说,气象雷达数据都显示在ND上。
控制面板:用于选择气象雷达的工作方式,控制天线的俯仰角度和稳定性,对接收机灵敏度进行控制。
波导系统:波导管作为收发机和天线之间射频信号桥梁通道。
二、气象雷达对目标的探测机载气象雷达主要用来探测飞机前方航路上的气象目标和其他目标的存在以及分布状况,并将所探测目标的轮廓、雷雨区的强度、方位和距离等显示在显示器上。
它是利用电磁波经天线辐射后遇到障碍物被反射回来的原理,目标的导电系数越高,反射面越大,则回波越强。
要清楚气象雷达如何工作的关键在于了解雷雨的反射率。
一般来说,雷雨的反射率被划分成三个部分:雷雨的下三分之一由于温度在冰点之上,所以全部由小雨滴组成,这部分是雷雨中对雷达波能量反射最强的部分。
雷达工作原理及相控阵雷达工作原理

雷达的工作原理雷达(radar)原是“无线电探测与定位”的英文缩写。
雷达的基本任务是探测感兴趣的目标,测定有关目标的距离、方问、速度等状态参数。
雷达主要由天线、发射机、接收机(包括信号处理机)和显示器等部分组成。
雷达发射机产生足够的电磁能量,经过收发转换开关传送给天线。
天线将这些电磁能量辐射至大气中,集中在某一个很窄的方向上形成波束,向前传播。
电磁波遇到波束内的目标后,将沿着各个方向产生反射,其中的一部分电磁能量反射回雷达的方向,被雷达天线获取。
天线获取的能量经过收发转换开关送到接收机,形成雷达的回波信号。
由于在传播过程中电磁波会随着传播距离而衰减,雷达回波信号非常微弱,几乎被噪声所淹没。
接收机放大微弱的回波信号,经过信号处理机处理,提取出包含在回波中的信息,送到显示器,显示出目标的距离、方向、速度等。
为了测定目标的距离,雷达准确测量从电磁波发射时刻到接收到回波时刻的延迟时间,这个延迟时间是电磁波从发射机到目标,再由目标返回雷达接收机的传播时间。
根据电磁波的传播速度,可以确定目标的距离公式为:S=CT/2 其中S为目标距离,T为电磁波从雷达发射出去到接收到目标回波的时间,C为光速雷达测定目标的方向是利用天线的方向性来实现的。
通过机械和电气上的组合作用,雷达把天线的小事指向雷达要探测的方向,一旦发现目标,雷达读出些时天线小事的指向角,就是目标的方向角。
两坐标雷达只能测定目标的方位角,三坐标雷达可以测定方位角和俯仰角。
测定目标的运动速度是雷达的一个重要功能,雷达测速利用了物理学中的多普勒原理:当目标和雷达之间存在着相对位置运动时,目标回波的频率就会发生改变,频率的改变量称为多普勒频移,用于确定目标的相对径向速度,通常,具有测速能力的雷达,例如脉冲多普勒雷达,要比一般雷达复杂得多。
雷达的战术指标主要包括作用距离、威力范围、测距分辨力与精度、测角分辨力与精度、测速分辨力与精度、系统机动性等。
其中,作用距离是指雷达刚好能够可靠发现目标的距离。
S波段天气雷达天线信号遮挡影响分析

S波段天气雷达天线信号遮挡影响分析摘要:天线是天气雷达系统的重要组成部分。。
但由于是自动化程度高的气象仪器,所以难免会在运行中出现天线故障。
本文提出了避雷针对天气雷达天线信号的影响分析,论述了其遮挡天线性能分析及计算方法。描述了天线测试原理和方法程序,给出了影响天线的实测数据结果。关键词:避雷针;S波段天气雷达系统;天线1避雷针对天气雷达系统天线影响与分析1.1避雷针的特性和天线主要技术指标天气雷达系统分布在全国的各个地区,避雷针主要目的是保证天气雷达系统在大功率状态下正常的工作,雷电对其不造成损坏。避雷针具有覆盖面积大,泄放雷电能力强,减弱引下线出现的大电流而形成的感应过电电压特点。避雷针信号传输部分是由金属导体,导线,避雷接线盒等部分组成,无论是加工还是安装,都有较高的要求。所以天气雷达系统中每个器件都需特殊处理,尤其是天线部分,它是天气雷达系统关键的微波发射和接收设备。天气雷达在工作状态时需要连续转动和不间断的发射和接收信号,天线每旋转一周有四次遇到避雷针,所以避雷针的影响是非常重要的。1.2避雷针的选择和影响(1)避雷针形式选择。一般选择为圆柱型钢结构材料外侧加入保护层(比如玻璃钢或塑料)。由于天气雷达系统为大功率传输设备,依据雷达设备波长的要求,选定直径越小的避雷针对天气雷达系统影响越小。(2)避雷针高度选择。从天气雷达系统实际情况分析,一定要高于整个雷达系统,使其发挥最大的避雷效果,因天气雷达系统天线方位在0~360°旋转,俯仰在0~90°旋转,避雷针全部都是垂直放置的,允许垂直偏差在千分之三,所以避雷针的垂直度对天线方位方向图的指标影响较大。(3)避雷针的强度设计。在高度合适的情况下在工作中要有一定的强度和韧性,防止天气雷达系统因避雷针强度不够被风吹折弯增大对天线信号遮挡面积,起不到避雷作用时,导致雷停机及火灾等情况出现。1.3避雷针对天线信号影响仿真计算依据以上特点原则,分析了雷达站两种常用尺寸避雷针对S波段天气雷达系统天线的影响,做出了仿真模型。图1为天气雷达系统天线前方避雷针为直径140mm时天线方向图仿真结果。图1避雷针直径d=140mm天线方向图仿真结果1.4天线性能仿真计算天线旁瓣的估算:天线旁瓣的设计目标为D/λ≥50,其旁瓣峰值包络至少90%满足以下的包络线:利用下式计算:G(θ)=29-25log(θ)(1)式中:θ为天线旁瓣角度;λ为工作波长;D为天线口径。(1≤θ≤20!)利用式(1)可计算频率为2.7~3.0GHz时,天线雷达系统S波段8.5m天线的旁瓣电平,计算可得天线旁瓣在2°时为大于21.47dB。满足天线设计技术指标要求。2天线实际测量原理和方法这里介绍天气雷达系统天线增益和旁瓣测量原理和方法。图2天气雷达系统天线增益和旁瓣测量的原理图利用频谱分析仪测量天气雷达系统天线增益和旁瓣测量原理方法是:首先按照图5所示,建立天气雷达系统天线测试系统,系统加电预热使系统仪器设备工作正常,连接天线与频谱仪的数据传输电缆合理设置频谱分析仪的状态参数,再将待测天线与发射源天线极化匹配;然后,开始转到待测天线伺服控制系统,利用频谱分析仪可直接测量出旁瓣电平如图3所示,利用方向图测试数据,根据公式:推算出天线增益,打印输出测量结果。式中:G为天线增益;θ3AZ为天线方位波束宽度;θ3EL为天线俯仰波束宽度。利用式(2)可计算频率为2.7~3.0GHz时,方位和俯仰波束宽度分别为0.99°时天线雷达系统S波段8.5m天线的增益,计算可得45.53dB。满足天线设计技术指标要求。图3S波段天气雷达系统天线实测结果3日常管护工作3.1天线座的清洁检查和维护天线座外部表层部件的清洗要选用合适的非碱性清洗剂。不可使用含水或水成分的清洗液对内部元器件进行清洗,滑环等部位的清洗可选用电子清洁剂。检查各接线板用于传输信号的电缆插头接触处是否有松动或油污侵蚀等其他异常情况。密切关注运动部件处电缆的磨损状况,检查波导旋转关节和拨叉的磨损,是否因运转过度已经松动,旋转关节转盘间隙是否回差大。天线座体外是否有积油,主要是因为俯仰箱两侧大齿轮和轴承在长期运行时润滑脂受到齿轮的积压和高温老化,变成稀释的润滑油流下致使天线座的外表积油后变黄,此时要用清洁剂或漆料进行清洗。4结束语本文以S波段天气雷达天线为例,仿真测试出两种常用避雷针对天气雷达天线增益和旁瓣的影响数据,对比分析出结果满足天线技术指标要求。对天气雷达系统以后的设计与测量提供重要参考依据。在实际工作过程中,操作人员要熟练掌握可能出现的各种故障和天线系统的构成与运行原理,特别是在零部件老化后故障的出现频率会增高,所以要进行适时的零件更换和保养。S波段天气雷达的使用寿命延长和高效运转离不开每一位气象工作者的精心管护。参考文献:[1]林昌禄,聂在平.天线工程手册[M].北京:电子工业出版社,2002.[2]李明洋,刘敏.HFSS天线设计[M].北京:电子工业出版社,2014.[3]谢拥军,王鹏,李磊,等.雷振亚AnsoftHFSS基础及应用[M].西安电子科技大学出版社,2007.[4]张德斌,周志鹏,朱兆麒.雷达馈线技术[M].北京:电子工业出版社,2010.[5]廖承恩,陈达章.微波技术基础[M].北京:国防工业出版社,1979.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
众所周知雷达天线的波瓣示意图可以形象地说 明雷达作用的俯仰范围及作用距离G
在图 1 中 0 为雷达天线俯仰角 E 为方向图半功 率角 它与天线的类型有关 R 为雷达天线最大辐射 方向的最大测距 如果收发公用一个天线 雷达作用
收稿日期: 2001-01-03
修回日期: 2001-04-10
Key words: micro-computer pitching disp1ay-system power
引言
我国现役的雷达天线俯仰控制比较简单 一般 通过方位/俯仰控制开关控制天线在方位方向转动 然后采用手动或自动装置对天线进行上仰或下俯G 因此 俯仰角很难精确控制G 同时 俯仰角的指示对 操作人员来说也不够方便 雷达俯仰角的指示一般 通过 PPI 显示器或俯仰指示器来指示 操作人员很 难通过 PPI 显示器或俯仰指示器将天线精确定位 并且观察天线俯仰时也不直观G 本文采用单片机进 行精确控制 液晶显示威力图的方式改造天线控制~ 显示系统 文中较详细地给出了硬件及软件设计G
火力与指挥控制研究会 火力与指挥控制情 报网 2002 年学术年会拟定于 2002 年第三季度 适当时候召开 由船总 716 所承办 会议期间将 邀请国内火控指控界著名专家 学者做综述或专 题报告 并组织学术讨论
一 征文范围 @20 世纪火控 指控发展回顾 @21 世纪火 控 指控发展方向 火控 指控新原理 新技术 新成果 火控 指控系统工程实践 @系统建 模 目标探测与跟踪 武器驱动 导航定位 实 验技术 检测技术 模拟训练技术 可靠性 维 修性 安全性 二 征文要求 1 论文内容充实 精炼 具有较高学术水平 和应用价值
雷达天线俯仰控制及威力显示系统硬件电路主
要由 SDC 自整角机/ 旋转变 压器-数字 转 换 器~ 8031 单 片 机[3]~ EPROM~ 8279 键 盘 接 口 集液 晶 显 示 模 块~ 继 电 器 驱 动 电 路~ 继电器及电源等组成O 硬件电路的主要工作原理
为 黄绿色 显示的形式为 320C WD > 240C hD 全点阵O 因此 将图 2 中显示的字符及数值C 包括雷达天线俯 仰角字符及数值~ 目标数和目标距离高度字符及数 值D 在背景中显示 而雷达天线的俯仰方向图及目标 采用图形显示点显示 这样二者的组合即为所需要
显示的信息O
2 天线俯仰控制系统的设计与实现
观地看出: 雷达能否发现目标; 能同时发现几个目 标O
由于系统送出天线转动信号受单片机控制 单
片 机 送 出 的 控 制 信 号 为 TTL 电 平 信 号 其 时 间 宽 度可以很精确 因而天线转动的位置也很精确O 改变 了原来不能将天线俯仰位置精确定位的缺点O 2. 2 软件设计
软件主要是由程序和功能子程序组成O 功能主 程序主要包括: 初始化~ 键盘输入~ 数据采集~ 输出控 制及显示等子程序O 软件部分主程序方框图如图 4 所示O
2 未曾在国内外公开发表 3 论文一般不超过 6000 字
写作格式按< 火力与指挥控制> 期刊 用 计算机打印两份 并请注明论文所属研究方向
上述征文范围 采用与否均不退稿 5 为便于联系 请写明第一作者的详细通
信地址 三 征文截止日期 2002 年 7 月 31 日 邮寄地址: 江苏省连云港市 102 信箱情报室
单片机 并将俯仰角度信息在显示器上以方向图的
形式显示出来O 操作者将雷达发现的各目标信息由 键盘输入到系统中O 根据显示器上显示的目标和方 向图的关系 通过键盘将天线转动信息C 天线俯仰 角D 输入到系统中 系统根据输入信息 输出一个控 制信号送到继电器 通过继电器控制天线转动 使之
调到最佳位置 操作者根据显示器的显示 可以很直
/ 为雷达发射信号的波长9o 为目标的散射截面积9
Simin 为雷达接收灵敏度G
雷达的威力范围是指: 雷达的最大作用距离~ 最
小作用距离~ 最大仰角~ 最小仰角及方位角范围G 因
此 如果将目标和俯仰方向图在显示器上同时显示
就可以比较形象直观的显示雷达的威力范围G 本系 统设计显示的雷达天线俯仰威力如图 2 所示( 见下 页D G
作 者简介: 邢福成( 1965- D 男 山东莱 州人 硕 士 研 究 领
域为: 信号处理~ 故障诊断9欧阳文 男 硕士G
距离方程为:
[ ] Rmax=
R t G2 /2 o
(
4TD
S 3 imin
1 4
式 中 Rmax 为 雷 达 天 线 最 大 辐 射 方 向 的 最 大 测
距 即图 1 中 R9Pt 为雷达发射功率9G 为天线增益9
秦立富收 邮编: 222006
火力与指挥控制研究会 火力与指挥控制情报网
2002 年 3 月
雷达天线俯仰控制及威力显示系统的设计
作者: 作者单位: 刊名:
英文刊名: 年,卷(期):
邢福成, 欧阳文 海军航空工程学院,山东,烟台,264001
火力与指挥控制 FIRE CONTROL & COMMAND CONTROL 2002,27(1)
示出来 方向图数据就是存储与俯仰角对应的方向
图各点的数据 显示方向图子程序就是将这些数据
在显示器上显示出来 即显示角度和方向图
当俯仰角进行改变时 显示器上俯仰角数据 方 向图一并改变 同时单片机输出一定时间宽度的控 制信号 驱动雷达天线转动
显示目标信息数据子程序是当已知目标信息时 将目标数 各目标的距离及高度通过键盘输入 并将 这些数据储存和在显示器上显示 由于目标显示的距 离和高度 目标的距离是指雷达天线到目标的实际距 离 不是雷达天线到目标的水平距离 而显示器上的 显示点是指水平数据和垂直数据 因此 需要将输入 的目标数据转换为水平数据和垂直数据 目标数据的 显示由显示目标信息数据子程序完成 数据的转换由 数据转换子程序完成 根据转换的数据 通过显示目 标字符子程序就可以将目标的图形在显示器上显示 出来 程序采用单片机 语言编写
本文链接:/Periodical_hlyzhkz200201021.aspx
可以在此数据的基础上改变 并储存数据 根据改变
量输出控制信号 驱动天线转动到指定位置 将俯仰
方向图与数据一一对应
由于方向图的点比较多 同时存在极坐标与直
角坐标转换的问题 对单片机来说 处理如此多的数
据相当麻烦 并且也没有必要 因此 将各角度的方
向图以数据的形式储存 形成数据字典 当已知俯仰
角时 就可以知道方向图的各数据 并在显示器上显
雷达天线俯仰控制系统由硬件部分和软件部分
组成O 2. 1 硬件设计
雷达天线俯仰控制系统的硬件方框如图 3 所 示O
是: 将雷达电源通过本系统电路转换为本系统各板 所需要的电源O 由天线俯仰同步发送机自整角机送 出天线俯仰信息到本系统 通过 SDC 转换模块将模 拟量的俯仰角度信息转换为数字量的角度信息送到
系统不正常部分作出定位 同时对键盘进行封闭 防
止继续操作损坏外部设备 等待使用者处理
键盘输入子程序是对键盘各键进行定义 并对
各键所改变的变量进行识别并储存
采集
子程序及存储俯仰角数据是将来自
雷达天线同步机自整角机的俯仰角采集 并在显示
器上将俯仰角数据显示 同时将数据储存 作为当前
的俯仰角数据 当需要改变俯仰角时 增加或减少
统G 同时给出了系统硬件设计和软件设计G
关键词: 单片机9俯仰9显示系统9威力
中图分类号: TN 959. 1+ 19TP271+ 5
文献标识码: A
The Design of System f or Controlling Radar Antenna and Displaying Power Chart
邢福成等: 雷达天线俯仰控制及威力显示系统的设计
( 总第 27-071D
文章编号: 1002-0640( 2002D 01-0069-03
雷达天线俯仰控制及威力显示系统的设计
邢福成 欧阳文
( 海军航空工程学院 山东 烟台 264001D
摘 要: 介绍现有雷达天线俯仰控制及显示系统的缺点 提出采用单片机控制~ 液晶显示威力图的方式改造天线俯仰系
雷达天线俯仰控制及威力显示系统软件的工作
原理是: 初始化子程序是清除单片机内的数据内存~ 设
置中断控制~ 设置栈底~ 设置输出控制信号等 后面 的程序运行作准备O
显示 俯仰威力显示系统' 子程序是在显示器上 显示 俯仰威力显示系统' 字符O 雷达开始加电过程
邢福成等: 雷达天线俯仰控制及威力显示系统的设计
显示器主要显示信息为: ( 1D 天线的俯仰方向图
- 70- C 总第 27-070D
火力与指挥控制
2002 年 第 1 期
C 主瓣D 及目标; C 2D 天线的俯仰角; C 3D 目标数及对应 目标的距离和高度O
本系统采用的显示器为 EMD320240 液晶显示 模块 它可以显示的显示点颜色为深蓝色 背景颜色
总第 27 071 71
中 特别是需要加高压的电路或元器件 如显象管 磁
空管等 需要预热几分钟 在这个过程中 可以对本系
统进行自检 也叫上电自检 同时还设置 键 当
对系统操作的正确性产生怀疑时 使用它完成自检功
能 正常时 显示 俯仰威力显示系统 字符 并开始采
集此时
的数据 不正常时 显示出错提示信息对
参考文献(2条) 1.李华 MCS-51系列单片机实用接口技术 1993 2.丁鹭飞;耿富录 雷达原理 1984
本文读者也读过(10条) 1. 旋导莉.瑛华军.安同一 微波网络分析仪自动测试系统的升级[会议论文]-2000 2. 徐倩 相控阵雷达收/发组件自动测试技术初探[会议论文]-1998 3. 石晓宇.熊家军.吴进.SHI Xiao-yu.XIONG Jia-jun.WU Jin 一种雷达威力图数字化方法[期刊论文]-空军雷达学 院学报2008,22(2) 4. 郦能敬.LI Neng-jing 对空情报雷达探测威力的设计论证[期刊论文]-雷达科学与技术2005,3(3) 5. 任艳频 基于Agilent VEE Pro的自动测试软件开发[会议论文]-2007 6. 欧阳文.夏明革 雷达威力图显示系统的设计[期刊论文]-海军航空工程学院学报2002,17(5) 7. 纪华.管弘.汪海勇 新型T/R组件自动测试技术研究[会议论文]-2003 8. 耿哲峤.侯汩.裴国玺 基于LabVIEW的RF测试系统的开发[会议论文]-2002 9. 刘杰.贾志谦.LIU Jie.JIA Zhi-qian 微波元器件自动测试系统[期刊论文]-中国测试2009,35(6) 10. 王中杰.李侠.周启明.胡国庭.WANG Zhong-jie.LI-xia.ZHOU Qi-ming.HU Guo-ting 雷达实际平面探测威力模 型与仿真算法研究[期刊论文]-现代防御技术2007,35(3)