位移测量装置的设计
基于红外激光光源的远距离微小位移测试系统设计

信 息 科 技4科技资讯 SCIENCE & TECHNOLOGY INFORMATIONDOI:10.16661/ki.1672-3791.2018.01.004基于红外激光光源的远距离微小位移测试系统设计韩伟 黄文浩 刘涌 高震宇(北京电子科技职业学院 北京 100176)摘 要:本文以建筑物结构沉降监测为应用背景,采用计算机视觉测量技术,精度高、非接触,适时监测,智能化,组网传输,实现远程监控量测,开发出一种远距离非接触式多测量点的微小位移监测系统,对三维微小位移测量方法进行研究,广泛应用于建筑物形变量检测,通过对比不同时间点的形变值和沉降值,累计产生的位移量曲线变化来判断建筑物整体稳定的变化趋势。
本课题研究并提出的基于计算机视觉的远距离微小位移检测方法,弥补了传统检测方法的不足,为实际工程问题的解决提供了一种新的思路。
关键词:非接触 微小位移 监测系统中图分类号:G64 文献标识码:A 文章编号:1672-3791(2018)01(a)-0004-02建筑物的结构动态位移信息是在建筑施工和使用中极其有价值的原始数据,对建筑物的安全保障、维护有着极其重要的意义。
传统的多种位移监测方法多为人工测量方法,在实际中有很大的局限性。
本文提出了一种基于计算机视频技术的远距离微小位移检测方法。
以建筑物建设过程和建设后的沉降监测为应用背景,开发出了基于红外激光光源的远距离非接触式建筑物沉降和倾斜的微小位移测量监测系统。
1 设计构思基于红外激光光源的远距离微小位移测试系统设计如下。
1.1 系统设计要求(1)实现视频测量点的监测位移收敛,在30m远的距离,测量点的面内微小位移测量精度达到1mm。
(2)数据处理、传输、曲线显示和报警信息发布功能。
1.2 系统设计内容和步骤(1)标志点的设计:设计精确的靶型标志点,实现测量标识和标定功能的统一。
(2)研究光的变化对目标物的影响:根据检测现场复杂的背景环境,设计能够增强目标物在图片中效果的照明系统。
基于Stm32控制器的LVDT位移测量系统设计(终稿) - 用于合并讲解

课程设计报告题目:基于STM32的LVDT位移测量系统设计姓名:余樾班级:09011301学号:2013302132西北工业大学自动化学院基于STM32的LVDT位移测量系统设计任务书1.设计目的与要求设计一个基于STM32控制器的LVDT数字测量系统设计,要求认真并准确地理解有关要求,按组完成系统设计,具体设计要求如下:(1)对流体传动管道中的压力进行,测温范围及精度:38mm,0.5%。
(2)LVDT信号的调制与解调,测量数据存储功能,掉电不丢失;(3)4位八段码实时数据显示;(4)通过RS232通信接口与上位机进行数据通信;(5)功能按键、指示灯和蜂鸣器报警。
2.设计内容(1)查阅资料,熟悉设计内容;(2)根据设计要求选择传感器,确定系统方案和主控芯片;(3)根据系统方案分别设计单元电路;确定元器件及元件参数;(4)画出电路原理图,正确使用逻辑关系。
3.编写设计报告写出设计的全过程,附上有关资料和图纸,并写出心得体会。
目录1. 引言 (1)2. 设计方案 (2)2.1. 任务分析 (2)2.2. 设计思路 (2)3. 详细设计 (3)3.1. 主控制器模块 (3)3.1.1. 微处理器电路 (3)3.1.2. 电源模块 (5)3.1.3. JTAG/SWD电路 (5)3.2. LVDT传感器的测量原理与电路设计 (6)3.2.1. LVDT传感器的测量原理 (6)3.2.2. LVDT传感器电路的设计 (6)3.3. 显示模块 (9)3.4. 串口通信模块 (10)3.5. 存储模块 (10)4. 总结与体会(不宜过长) (11)附录1 MAX7219 (14)附录2 I2C总线 (16)基于STM32的LVDT位移测量系统设计摘要: LVDT可以用来测量物体的伸长度、震动频率、振幅、物体厚薄程度和膨胀度等精确数据。
具体还可以用在机床工具和液压缸的定位,以及辊缝和阀门的控制等。
LVDT还有无摩擦测量、无限的机械寿命、坚固耐用、环境适用性等优点,这使它应用范围也非常广泛。
微小位移测量装置
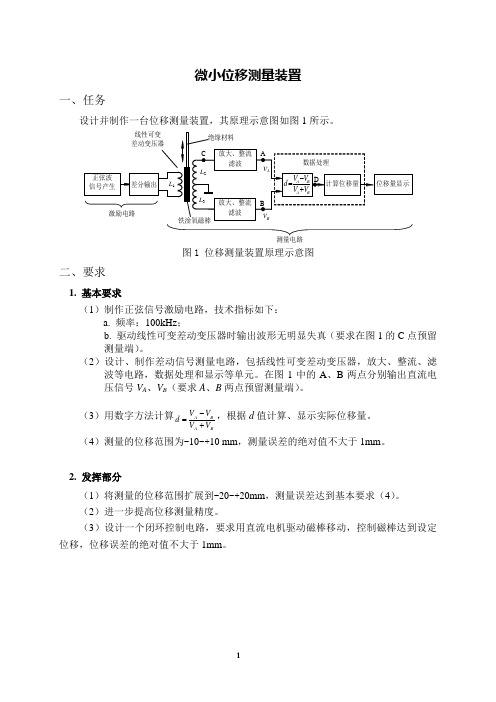
微小位移测量装置一、任务设计并制作一台位移测量装置,其原理示意图如图1所示。
铁淦氧磁棒测量电路图1 位移测量装置原理示意图二、要求1. 基本要求(1)制作正弦信号激励电路,技术指标如下:a. 频率:100kHz ;b. 驱动线性可变差动变压器时输出波形无明显失真(要求在图1的C 点预留测量端)。
(2)设计、制作差动信号测量电路,包括线性可变差动变压器,放大、整流、滤波等电路,数据处理和显示等单元。
在图1中的A 、B 两点分别输出直流电压信号V A 、V B (要求A 、B 两点预留测量端)。
(3)用数字方法计算BA B A V V V V d +-=,根据d 值计算、显示实际位移量。
(4)测量的位移范围为-10~+10 mm ,测量误差的绝对值不大于1mm 。
2. 发挥部分(1)将测量的位移范围扩展到-20~+20mm ,测量误差达到基本要求(4)。
(2)进一步提高位移测量精度。
(3)设计一个闭环控制电路,要求用直流电机驱动磁棒移动,控制磁棒达到设定位移,位移误差的绝对值不大于1mm 。
三、评分标准简易频谱分析仪一、任务设计并制作一个能显示输入信号频谱分析仪。
二、要求 1、 基本要求1) 输入周期的正弦、三角波、方波信号,其频率范围频率为100Hz -100KHz ,幅度范围为100mV -5V ,测出其频率点并显示其频谱分布;2) 谱线频率频率间隔为2/T ωπ= ,频点可按100Hz 步进设置,谱线最少为10条,也可以步进设置,准确度优于10%;3) 测量时间短,频率变化后1秒内能自动刷新测量结果。
2、发挥部分1) 能实时显示主要频点频率,准确度高;2) 扩大输入信号频率范围到1MHz ,能显示谱线,并测量频率;3) 能测量正弦调幅信号频谱图,调制波频率1-10KHz 可1KHz 步进,载波频率10-100KHz,1K 步进可调,深度10%-100%,以10%步进可调,要求频谱变化明显;三、评分标准。
非接触式位移测量技术及应用研究
精品合同,仅供参考,需要可下载使用!电子科技大学毕业设计(论文)非接触式位移测量技术及应用研究学院名称学院名称专业名称自动化专业学生学号学生学号学生姓名学生姓名指导教师教授姓名助理指导老师老师姓名202X年X月第一章1.1位移传感器简介位移传感器是人类发展的产物,它可以帮助人们了解更多的信息。
在生活生产中,需要的得到位移变化量来进行机械的操作等。
根据位移的变化量我们可以采用不用的测量技术。
比如本课题需要得到制动盘内摩擦块的位移量,可以选用电涡流传感器、磁致伸缩位移传感器。
这类都是高精度的位移传感器。
根据物体不同的运动方式有以下两种测量技术。
直线位移测量技术可以更具滑动变阻器在滑片在不同位置的不同电阻的原理设计,滑片移动的距离与滑动变阻器两端电压有着真比关系,假如滑片位移了一个很大的距离,则两端的电压也跟着变大。
只要用电压表,电流表得出变阻器两段电压,电流值,便可得出电阻值,就可得出滑片的位移量,待测物体与滑片相连,便可得出被测物体的位移量。
角度位移传感器在折弯机里作用非常大,可以使人们得到想要角度,用于工业生产中。
1.2位移传感器的国内外研究现状及发展趋势随着科技的迅速发展,对位移传感器的特性日益严格,而且需求量也不断增加。
对现有的位移传感器精心改良,使用最新研发的材料,并增加新的技术,可以使她们在不同场合和环境内稳定的工作,并且这些传感器的价格可以让大众接受。
使时代进步的新技术有:在中国前几年一直利致于LVDT式位移传感器的改进,随着OEM技术的成熟,我国逐渐了解并掌握这一新技术,并应用在位移传感器内,使得传感器技术有着巨大的变化,逐渐走向集成化,一体化,自动化,和智能化。
在的我国LVDT的技术也是在世界的前沿的,我国的LVDT式位移传感器最高精度可到0.05%,绝对误差小于1um。
我国LVDT式位移传感技术做的好的公司有很多,比如我们家那的硕锋电子科技有限公司,他家主要做机电自动化产品,智能机器人。
基于MSP430的位移测量装置的设计
关键词 单片机 ; 差动变压器 ; 位移 ;磁棒
T 381 P 6 . 中图 分 类 号
De in o s l c m e tM e s rn v c s d o S 4 0 sg fDip a e n a u i g De ie Ba e n M P 3
L T, X; c ied ie ,k y o r n C i p p r trai s h u cino cu a e au ig a dds lyn e c o t n VD I mah n r r e b a da dL D i t s a e.I e l e ef n t f c r tl me s r n i a ig t r mo i v nh z t o a y n p h mi o
浩。
青岛 2 60 ) 64 5
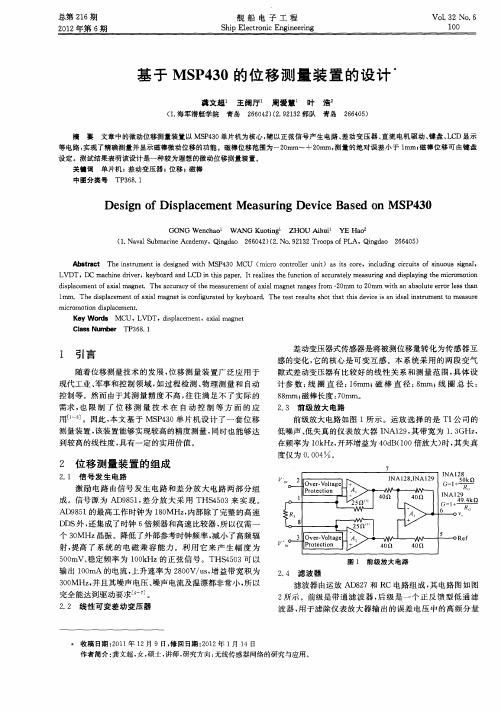
文章中的微动位移测量装置以 MS 4 0 片机为核心 , 以正弦信号产 生电路 、 P3单 辅 差动变压 器、 直流 电机驱 动 、 键盘 、 C L D显示
等电路 , 实现了精 确测量并显示磁棒微动位移的功能 。磁棒位移范围为一2m  ̄ +2r 测量的绝对误 差小 于 l m; 0m 0 m, a m 磁棒 位移可 由键盘
Abs 怕 c Th nsr me s d sg e t S 3 CU (mir o tolru t a t o e icudn ic is o iu us ina, t t ei tu nti e in d wih M P4 0 M co c n r l ni) s is c r , n l ig crut fsn o sg 1 e
2 位 移 测 量 装 置 的组 成
2 1 信 号 发 生 电路 .
位移测量系统的设计
在控制领域中,经常需要进行各种位移量的测在实际的工业位置控制领域中,为了提高控制精度,准确地对控制对象进行检测足十分艰要的。
传统的机械测量位移装S L L远远不能满足现代生产的辦要,而数字式传感器光电编码器, 能将角位移量转换为勾之对应的电脉冲输出,;1:要用于机械位置和旋转速度的检测,具冇精度高,体积小等特点,冈此木设计决定采用光电编码器进行位移检测,本设计为采用光屯编码器来实现位移测请及《仿真,实现测锖來f〗外部的不冋的位移值及显& A•体应用AT89C51中。
片机为核心,光电编码器进行位移测量,同时以LCD液品显示模块显示。
木设计采用的光电编码器输出电H(为5V, 输出倍y经四倍频电路处现后送入巾片机进行计数处理,量后送入LCD模块量示。
木文从位移测量原理入手,详细阐述了位移测#系统的:丨:作过程,以及硬件电路的设计、V。
示效果2木文吸收了硬件软件化的怨想,实现了题丨丨要求的功能。
关键词:位移测蛍,光电编码器,单片机,LCD显示模块AbstractIn ihe control field, a variety of displace量ent 量easure量ents often need lo be carried out。
In actual industry position control do量ain, to increase the control precision, carries on the exa量ination to the controlled 量e量ber is accurately very i量portant。
The traditional 量achinery survey displace量ent installs has not been able 10 satisfy the 量ode量 production by far the need, but the digital sensor electro-optic encoder, can iransl'or量 ihe angular displace量ent into with it correspondence electricity pulse output, 量ainly uses in the 量echanical position and the velocity of whirl exa量ination, has the precision to be high, volu量e s量all and so on characteristics, therefore this design decided that uses the electro-optical encoder to carry on the displace量ent to exa量ine。
电感式位移传感器的设计(9页)
电感式位移传感器的设计(第1页)一、设计背景位移传感器在现代工业生产中扮演着重要角色,广泛应用于机械制造、自动化控制、航空航天等领域。
电感式位移传感器作为一种常见的位移检测装置,具有精度高、稳定性好、抗干扰能力强等优点。
本文将详细介绍电感式位移传感器的设计过程。
二、工作原理电感式位移传感器是基于电磁感应原理设计的。
当传感器中的激励线圈通以交流电流时,会在周围产生交变磁场。
当被测物体(通常是金属目标物)进入该磁场并发生位移时,会导致磁路的磁阻发生变化,进而引起线圈感应电动势的变化。
通过检测感应电动势的变化,即可实现对位移量的精确测量。
三、设计目标1. 确保传感器具有较高的测量精度和分辨率;2. 提高传感器的线性度和稳定性;3. 优化传感器结构,使其便于安装和维护;4. 降低成本,提高传感器的性价比。
四、传感器结构设计1. 激励线圈设计(1)线圈的匝数:匝数越多,产生的磁场强度越大,但线圈电阻也会增加,导致功耗增大。
因此,需在磁场强度和功耗之间寻找平衡。
(2)线圈的材料:选择具有较高磁导率和电阻率的材料,以提高线圈的性能。
(3)线圈的形状:根据实际应用场景,设计合适的线圈形状,使其在有限的空间内产生较强的磁场。
2. 检测线圈设计(1)线圈与激励线圈的相对位置:确保检测线圈能充分感应到激励线圈的磁场变化。
(2)线圈的匝数:匝数越多,感应电动势越大,但线圈电阻也会增加。
需在灵敏度与功耗之间进行权衡。
(3)线圈的材料:选择具有较高磁导率和电阻率的材料。
电感式位移传感器的设计(第2页)五、信号处理电路设计1. 激励信号源(1)频率选择:激励信号的频率应适中,频率太低会导致灵敏度下降,频率太高则可能引起电磁干扰。
(2)幅值稳定:确保激励信号幅值稳定,以减少测量误差。
2. 感应电动势检测感应电动势的检测是位移测量的关键步骤。
检测电路设计如下:(1)放大电路:由于感应电动势信号较弱,需通过放大电路对其进行放大,以便后续处理。
一种高精度测量仪直线位移装置的设计

Ab ta t s r c :Ai n t h ee t o a u n p n l y tm ft d t n e g h me s r g i s u n ,s c s c m- mi g a e d f cs fme s r g s id e s se o r i o a ln t a u n t me t u h a o t i a i l i n r
u ng i t me t i r nsr u n.
Ke r s e gh me s r g i sr me t y wo d :l n t a u n n t i u n ;me s r gs i d e ih a c rc a u n p n l ;h g c u a y;l e rd s l c me td vc i i a ip a e n e ie n
般 采用 高精 度测 量 主轴 , 其 结 构复 杂 、 调 繁 但 装 种具 有空 气 阻尼 控 制 的直 线 位 移 装 置 , 应 用 并
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
位移测量装置的设计摘要:微小位移量的精确测量是测控工程技术中的一个重要课题。
本文介绍了基于线性可变差动变压器的位移测量系统的系统结构,主要硬件设计和软件流程,以及相关参数的设置。
硬件设计采用的直接频率合成芯片AD9851、电流负反馈高速运放AD811、高精度串行AD 转换芯片ADS7886、直流电机驱动专用芯片MC33887等高性能芯片较好地满足了低功耗、高精度、实时测控的设计要求;软件设计遵循模块化编程思想,便于系统升级。
关键词:DDS 信号 位移测量 差动变压器 单片机 运算放大器Design of Displacement Measuring SystemAbstract :Accurate measurement of small displacement in measurement and control-technology is an important issue. A differential transformer displacement measuring system based on linear variable differential transformer is designed. The system structure, main hardware design, software processes and critical parameter configuration are presented. Some high performance ASIC chips used in the hardware design, such as direct frequency synthesizer chip AD9851, high-speed current feedback amplifier AD811, precision serial AD converter chip ADS7886, DC motor drive chip MC33887, which is satisfied with the design demands for the low power, high precision and realtime monitoring control. Software design follows the modular design principle, and easy to upgrade.Key words :DDS, displacement measuring, differential transformer, MCU, amplifier1 引言随着生产加工方式的变革、检测指标要求的提高,需要用非接触式测量方法取代传统的接触式测量。
当前位移测量技术主要有以下几种:有机械的浮子方法,利用电阻、电感、电容的非电量电测量方法;有光学或激光测量方法;有利用放射性或射流技术的测量方法等。
数字处理器处理能力的增强尤其是各式传感器的更新换代,使各种非接触式测量装置的设计趋于智能化。
本文设计了一种基于线性可变差动变压器的位移测量装置,有着设计成本低、位移线性度好、功耗低等有点,具有一定的实用价值。
2 系统设计2.1 位移计算方法如图1(a )所示,初级绕组为N 1,次级绕组为N 2-1和N 2-2,初级线圈接入适当的u 1后,由于互感作用在两个次级线圈上产生的磁感应电动势为111111E j 1jwM wM I U r jwL ∙∙∙=-=-+, 222111E j 1jwM wM I U r jwL ∙∙∙=-=-+ (1) 式(1)中,1U 为初级线圈激励电压相量,M 1和M 2为次级线圈1和2的互感,r 1为初级线圈的有效电阻,L 1为初级线圈的电感。
如果把两个次级线圈的同名端相连,则传感器的输出电压为22122u u u =- (2)u 1u 2-1u 2-2u 20(a)(b)+V u 2-1u 2-2图1 差动变压式传感器原理(a )差动变压式传感器原理图 (b )数据提取图 在一定范围内,当铁芯移动时,u 2就随铁芯位移x 成V 字型特性。
在初级绕组L 1上加100K 等幅正弦电压, 则在次级绕组L 2和L 3均感应出电压, 假若忽略有限长线圈内磁场强度的不均匀分布,且只计算有介质部分产生的磁场,不考虑磁棒运动过程中线圈内空气中磁场引起的变化,则L 2、L 3上感应的电压(V A 、V B )分别为0V =k*()A X x +∆, 0V =k*()B X x -∆ (3)以上k 为一恒定系数,0X 为磁棒的一半长度,x ∆为磁棒运动位移。
则00()/()(2**)/(2**)/A B A B d V V V V k x k X x X =-+=∆=∆ (4)所以 0*x d X ∆= (5)2.2 系统结构位移测量装置系统结构如图2所示,特定频率的正弦信号经运算放大器进行差分输出,驱动线性可变差动变压器的原边。
差动变压器两副边感应出正弦电压信号,分别经过放大、精密整流、滤波得到稳定的直流电压。
对此两路直流电压进行AD 转换,对所获数据分析处理,计算位移量,结果通过人机交互界面得到显示。
此外,控制部分对来自键盘的输入位移数据进行分析处理,通过直流电机驱动磁棒移动,控制磁棒到达指定的位移处,实现位移设定功能。
正弦信号产生电路 差分放大 线性可变差动变压器整流滤波整流滤波 A/D 转换A/D 转换单片机数据处理键盘输入液晶显示直流减速电机图2 差动变压式位移测量装置系统结构图3 主要硬件设计3.1 正弦激励信号产生电路如图3所示,AD9851是美国ANALOG DEVICES公司采用先进DDS(Direct Digital Synthesis-DDS)直接数字频率合成(FS)技术生产的高集成度产品。
具有输出频率相对带宽较宽、频率转换时间短、频率分辨率极高、相位变化连续、输出波形灵活性好等优点。
J5和WLCK、FQ _UD为AD9851数据总线和控制线的引出端口,和外部MCU连接,IOUT为产生的100kHz正弦信号输出端,幅值约为500mV(未经任何放大处理之前)。
经OPA228一级放大输出到差动放大电路进行差分放大。
图3正弦激励信号产生原理图3.2 变压器副边电压处理电路变压器副边两路同频正弦波信号需经处理后才能交由AD转换器进行模拟信号采样。
如图4所示,从差动变压器次级输出的交流信号同样经过AD811 进行一次放大,以达到足够大的幅值送给整流二极管进行整流,再经过两级电容滤波,得到平滑的直流电压。
由于经过整流器出来的两路电压信号一路为正,一路为负,而A/D转换器只能采样正电压,于是在输出负电压之后采用由通用运放LF353构成的一级反相器进行反相,另一路加一级电压跟随器进行阻抗匹配。
同时为了消除数字电路对模拟电路的干扰,将数字地和模拟地分开,之间用磁珠相连进行处理,可以达到了较好的抗干扰效果。
图4变压器副边电压整流滤波、放大、绝对值变换原理图电压跟随器:即放大倍数为1的同向比例放大器形式。
反相器:即放大倍数为-1的反向比例放大器形式。
经过各级放大、整流滤波后交由ADS7886采样的直流电压信号的电压幅约值为1.0V(磁棒位移为0时),硬件和软件采用这个参考值进行设计。
3.3直流电机驱动MC33887电路如图5所示,MC33887是具有负载电流反馈桥型功率芯片,反应灵敏。
适合闭合回路的直流电机驱动,在汽车电子中得到广泛应用。
图5电机驱动原理图能够为感性负载提供连续的高达5A的驱动电流,负载可用高达10千赫的PWM方式驱动,单片机将键盘输入的位移数据和通过AD采样得到的位移数据进行比对,若两者相等,说明直流电机(5V电压,玩具车驱动电机)已经驱动磁棒移动到指定的位移处,否则,电机继续驱动磁棒移动直到磁棒移动到指定的位移处。
电路中,单片机通过IN1和IN2向MC33887发出正反装指令,电机通过OUT1和OUT2分别输出控制电机正反转的驱动电流,驱动磁棒发生位移。
经检测,直流电机的电机迟滞效应对该部分影响较大,若采用步进电机,测量精度将得到更大的提升。
4软件设计系统软件程序设计流程如图6所示,采用模块化设计方法,所有子程序用到的端口,全部用宏定义在程序顶部说明以便日后方便全局调用;当不需要改变整个寄存器值时,算法全部采取位操作形式,以避免对其他位的干扰。
同时为了消除硬件电路干扰带来的误差,在软件设计上我们做了线性拟合及近似的处理,并进行软件滤波,达到了很好的效果。
系统设计中多级电路均采用了运算放大器,因此实际系统的软件设计(参数的测量算法)要与实际的运放放大倍数一致,以减小数据处理引入的影响。
在不需要检测位移数据的情况下,系统工作在低功耗模式下,可使用电池对系统供电。
位移发生部分通过游标卡尺可测得设定位移量,要实现的位移值以及实际测量位移量可通过液晶显示出来,实现了很好的人机界面。
键盘初始化读取按键键值有按键按下确认键按下返回设定值(再次确认)结束否是否是是读取位移量允许范围内位移量驱动电机调整磁棒位移测定磁棒位移测量位移测定值=设定值结束否是是否系统初始化当前位移显示设定磁棒位移有按键按下驱动电机调整磁棒位置磁棒移动到设定位移是否是否(a )(b )(c )图6 软件流程图(a) 控制流图 (b) 键盘扫描流图 (c) 位移测量流图 5 结束语本文中位移的计算方法采用软件实现并采用直线拟合算法对位移数据进行处理以提高线性度。
DDS 芯片产生的精准电压信号稳定度很好,各级运算放大器组成的放大和波形处理单元输出均无失真。
此外,系统调试时将差动变压器次级电压整流滤波后的电压放大倍数设置在5-6之间得到的d 值线性度较好,除在部分位移点的位移测量数据误差较大,大部分点的位移测量误差能控制在0.5mm 范围,达到了设计要求。
参考文献:[1]杨力生,杨士中. 微位移测量技术的分析[J]. 重庆大学学报. 2007. (4)[2]测量仪器与技术. 机电工程技术[J]. 2007.(3)[3]赵天池. 传感器和探测器的物理原理和应用[M]. 北京:科学出版社, 2008[4]杨相坤,罗玲,曾友华,刘一. 改进型差动变压器线位移传感器的分析研究[J]. 机电一体化,2009, (8)[5]陈莹莹.低频数字程控信号源的设计[J].检测技术与自动化装置. 2007, (5)[6]耿德根.A VR 高速嵌入式单片机原理与应用(修订版)[M]. 北京:北京航空航天大学出版社,2001。