嵌入式作业
哈尔滨工程大学函授2012级嵌入式系统习题作业
式系统习题作业某计算机指令字长为16位,指令有双操作数、单操作数和无操作数3种格式, 每个操作数字段均用6位二进制表示,该指令系统共有m条(m<16)双操作数指令,并存在无操作数指令。
若采用扩展操作码技术,那么最多还可设计出(24-m)×26-1条单操作数指令。
以下不属于网络安全控制技术的是_差错控制技术_。
“冲击波”病毒属于__蠕虫_类型的病毒,它利用Windows操作系统的RPC漏洞进行快速传播。
标准化法__确定了标准体制和标准化管理体制,规定了制定标准的对象与原则以及实施标准的要求,明确了违法行为的法律责任和处罚办法。
某开发人员不顾企业有关保守商业秘密的要求,将其参与该企业开发设计的应用软件的核心程序设计技巧和算法通过论文向社会发表,那么该开发人员的行为_侵犯了企业商业秘密权_计算机要对声音信号进行处理时,必须将它转换成为数字声音信号。
最基本的声音信号数字化方法是取样-量化法。
若量化后的每个声音样本用2个字节表示,则量化分辨率是_1/65536_。
某幅图像具有640×480个像素点,若每个像素具有8位的颜色深度,则可表示256种不同的颜色,经5:1压缩后,其图像数据需占用_ 61440(Byte)_(Byte)的存储空常见的软件开发模型有瀑布模型、演化模型、螺旋模型、喷泉模型等。
其中瀑布模型模型适用于需求明确或很少变更的项目,_喷泉模型_模型主要用来描述面向对象的软件开发过程。
软件能力成熟度模型(CMM)是目前国际上最流行、最实用的软件生产过程标准和软件企业成熟度的等级认证标准。
该模型将软件能力成熟度自低到高依次划分为初始级、可重复级、已定义级、已管理级、优化级。
从_已定义级_开始,要求企业建立基本的项目管理过程的政策和管理规程,使项目管理工作有章可循。
软件测试通常分为单元测试、组装测试、确认测试、系统测试四个阶段,_可靠性_属于确认测试阶段的活动。
11.嵌入式开发环境主要包括哪些组件?答:嵌入式系统开发需要交叉编译和在线调试的开发环境,主要包括宿主机目标机(评估电路板)基于JTAG的ICD仿真器、或调试监控软件、或在线仿真器ICE运行于宿主机的交叉编译器和链接器、以及开发工具链或软件开发环境嵌入式操作系统12、ARM核中什么寄存器用于存储PC?R13通常用来存储什么?R14通常用来存储什R15用于程序计数寄存器PC,R13通常用来做堆栈指针寄存器,R14通常用来做链接寄存器,保存函数调用的返回地址13 Boot Loader在嵌入式系统中主要起什么作用?完成哪些主要的工作?答:Boot Loader是在嵌入式系统复位启动时,操作系统内核运行前,执行的一段程序。
嵌入式系统课后答案
嵌⼊式系统课后答案嵌⼊式系统2011作业(⾮标准答案,仅供参考)第1章嵌⼊式系统概述 1、什么是嵌⼊式系统?答:嵌⼊式系统指的是以应⽤为中⼼和以计算机技术为基础的,并且软硬件是可裁剪的,能满⾜应⽤系统对功能、可靠性、成本、体积、功耗等指标严格要求的专⽤计算机系统。
3、根据嵌⼊式系统的复杂程度,嵌⼊式系统可分为哪4类?答:1:单个微处理器;2:嵌⼊式处理器可扩展的系统; 3:复杂的嵌⼊式系统; 4:在制造或过程控制中使⽤的计算机系统。
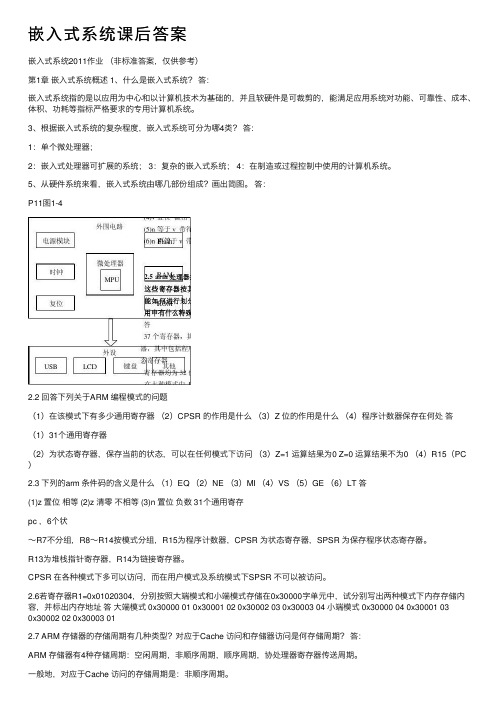
5、从硬件系统来看,嵌⼊式系统由哪⼏部份组成?画出简图。
答:P11图1-42.2 回答下列关于ARM 编程模式的问题(1)在该模式下有多少通⽤寄存器(2)CPSR 的作⽤是什么(3)Z 位的作⽤是什么(4)程序计数器保存在何处答(1)31个通⽤寄存器(2)为状态寄存器,保存当前的状态,可以在任何模式下访问(3)Z=1 运算结果为0 Z=0 运算结果不为0 (4)R15(PC)2.3 下列的arm 条件码的含义是什么(1)EQ (2)NE (3)MI (4)VS (5)GE (6)LT 答(1)z 置位相等 (2)z 清零不相等 (3)n 置位负数 31个通⽤寄存pc ,6个状~R7不分组,R8~R14按模式分组,R15为程序计数器,CPSR 为状态寄存器,SPSR 为保存程序状态寄存器。
R13为堆栈指针寄存器,R14为链接寄存器。
CPSR 在各种模式下多可以访问,⽽在⽤户模式及系统模式下SPSR 不可以被访问。
2.6若寄存器R1=0x01020304,分别按照⼤端模式和⼩端模式存储在0x30000字单元中,试分别写出两种模式下内存存储内容,并标出内存地址答⼤端模式 0x30000 01 0x30001 02 0x30002 03 0x30003 04 ⼩端模式 0x30000 04 0x30001 030x30002 02 0x30003 012.7 ARM 存储器的存储周期有⼏种类型?对应于Cache 访问和存储器访问是何存储周期?答:ARM 存储器有4种存储周期:空闲周期,⾮顺序周期,顺序周期,协处理器寄存器传送周期。
吉大14秋学期《嵌入式系统与结构》在线作业一答案
吉大14秋学期《嵌入式系统与结构》在线作业一
一,单选题
1. 一个任务,也称作一个(),是一个简单的运行程序。
每个任务都是整个应用的某一部分,每个任务被赋予一定的优先级,有它自己的一套CPU寄存器和自己的栈空间。
A. 子核
B. 线程
C. 进程
D. 单元
?
正确答案:B
2. FIQ总的延迟时间为()周期
A. 27
B. 28
C. 29
D. 30
?
正确答案:A
3. 一个任务被唤醒,意味着()。
A. 该任务重新占有了CPU
B. 它的优先级变为最大
C. 其任务移至等待队列首
D. 任务变为就绪状态
?
正确答案:D
4. UC/OS操作系统的主要开发语言是()。
A. 汇编语言
B. C++
C. C
D. JA V A
?
正确答案:C
5. VxWorks操作系统特点描述不正确的是()。
A. 实时性强
B. 支持多任务
C. 简洁,高效的内核
D. 兼容性较差
?
正确答案:D。
嵌入式练习题附部分答案
选择题1.W3C制定了同步多媒体集成语言规范,称为____规范。
A. XMLB. SMILC. VRMLD. SGML##2.________完全把系统软件和硬件部分隔离开来,从而大大提高了系统的可移植性。
A. 硬件抽象层B. 驱动映射层C. 硬件交互层D. 中间层##A3.在C语言中,设有数组定义:char array[]="China"; 则数据array 所占用的空间为______。
A. 4个字节B. 5个字节C. 6个字节D. 7个字节##C4.对某一寄存器某几位清零,可用一条指令_______来实现。
A. ANDB. ORC. NOTD. AOR##A5.实时操作系统(RTOS)内核与应用程序之间的接口称为________。
A. 输入/输出接口B. 文件系统C. APID. 图形用户接口##C6.在操作系统中,Spooling技术是用一类物理设备模拟另一类物理设备的技术,实现这种技术的功能模块称做____。
A. 可林斯系统B. 斯普林系统C. 图灵机系统D. 虚拟存储系统##7.文件系统的主要功能是______。
A. 实现对文件按名称存取B. 实现虚拟存储器C. 提高外村的读写速度D. 用于保护系统文档##8.在CPU和物理内存之间进行地址转换时,________将地址从虚拟(逻辑)地址空间映射到物理地址空间。
A. TCBB. MMUC. CacheD. DMA##9.以下叙述中,不符合RISC指令系统特点的是______。
A. 指令长度固定,指令种类少B. 寻址方式种类丰富,指令功能尽量增强C. 设置大量通用寄存器,访问存储器指令简单D. 选取使用频率较高的一些简单指令##10.在操作系统中,除赋初值外,对信号量仅能操作的两种原语是____。
A. 存操作、取操作B. 读操作、写操作C. P操作、V操作D. 输入操作、输出操作11.在面向对象系统中,用______关系表示一个较大的“整体”包含一个或多个较小“部分”的类。
(完整word版)嵌入式系统模拟试题及答案
学习中心/函授站_姓名学号西安电子科技大学网络与继续教育学院2014学年下学期《嵌入式系统》期末考试试题(综合大作业)考试说明:1、大作业于2014年12月25日下发,2015年1月10日交回;2、考试必须独立完成,如发现抄袭、雷同均按零分计;3、答案须手写完成,要求字迹工整、卷面干净。
一、问题简述(每小题4分,共20分)1、简述嵌入式系统的定义和组成结构。
答:嵌入式系统是以应用为中心,以计算机技术为基础,并软硬件可剪裁、功能、,可靠性、体积、重量、成本、功耗、成本、安装方式等方面符合要求的专用计算机系统。
嵌入式系统一般由嵌入式微处理器、存储与I/O部分、外设与执行部分、嵌入式软件等四个部分组成.2、简单说明ARM微处理器的特点。
答:(1) 体积小、低功耗、低成本、高性能。
(2)支持Thumb(16位)/ARM(32位)双指令集,能很好地兼容8位/16位器件。
(3)大量使用寄存器,指令执行速度更快。
(4)大多数数据操作都在寄存器中完成,通过Load/Store结构在内存和寄存器之间批量传递数据。
(5)寻址方式灵活简单,执行效率高。
(6) 指令长度固定.3、简述嵌入式系统产品的设计和开发过程。
答:①在嵌入式系统的开发过程中,一般采用的方法是首先在通用PC机上的集成开发环境中编程;②然后通过交叉编译和链接,将程序转换成目标平台(嵌入式系统)可以运行的二进制代码;③接着通过嵌入式调试系统调试正确;④最后将程序下载到目标平台上运行。
要强调,选择合适的开发工具和调试工具,对整个嵌入式系统的开发都非常重要。
4、简述嵌入式系统设计中要考虑的因素。
答:在嵌入式系统的开发过程中,要考虑到实时性、可靠性、稳定性、可维护性、可升级、可配置、易于操作、接口规范、抗干扰、物理尺寸、重量、功耗、成本、开发周期等多种因素。
5、什么是BootLoader,了解其在嵌入式系统中作用。
答:就是启动载入或引导加载又叫自举装载.由于系统加电后需要首先运行BootLoader这段程序,因此它需要放在系统加电后最先取指令的地址上。
抗滑嵌入式封层施工工法
抗滑嵌入式封层施工工法一、前言抗滑嵌入式封层施工工法,即采用特制嵌入式封层系统施工,以提升道路耐久性和安全性的新型工法。
在道路行车中发生车辆侧滑和打滑是比较常见的问题,这样的情况会给车辆的行驶安全带来极大的隐患。
而抗滑嵌入式封层的出现就能够有效的解决这一问题。
在东亚地区,抗滑嵌入式封层已经被广泛地应用于高速公路、城市道路、机场跑道等路面。
本文将详细介绍抗滑嵌入式封层施工工法的特点和适用范围,以及实施过程需要注意的各个环节。
二、工法特点抗滑嵌入式封层的特点在于采用嵌入式封层系统,通过人工或机械施工将橡胶复合粘结剂和特殊硅砂平均铺撒在路面上,形成一个具有良好抗滑性能的道路表面,从而有效地提高道路的安全性和使用寿命。
嵌入式封层的特制材料与路面结构深度结合,不仅具有较好的防滑性能,而且对于路面的疲劳和氧化等问题也有很好的缓解作用,因此,该工法能够大大提高路面的耐久性和抗滑性能。
三、适应范围该工法适用于各种类型道路,特别是个损坏、水泥路面、瀑布式路面、高速公路等道路。
在高温、潮湿、雨雪等恶劣天气环境下,嵌入式封层仍能保持良好的防滑性能,减少车辆打滑和侧滑的风险。
四、工艺原理本工法重点分为 2 个部分,即基层处理和封层施工。
1、基层处理基层处理是施工中一个重要的环节,关系道路抗剪和抗压强度的提高,其主要目的是加强道路表层的紧密性和耐久性,防止路面深度疏松和水洞的产生。
具体操作方法:首先进行打破旧路面并对其进行清理的工作,然后在路面上施涂特殊防腐涂料以加强表层的紧密性,最后再进行碾压涂层,凸起切割、清理、填塞缝隙的工作。
2、嵌入式封层施工嵌入式封层施工是本工法的核心,此部分主要是将封层材料均匀涂抹在路面上,使其与路面深度结合,从而形成一个具有良好防滑效果的道路表面,其主要分为下发基层施工和上发封层施工。
具体操作方法:下发工头一个人穿戴好防护用具,再根据道路的情况,选择使用手持散粉或机械散粉两种方式对嵌入式封层材料进行平均铺撒,确保每一处施加量相同;然后再使用特殊的除尘设备将路面上的泥土、石子等杂物清理干净,最后把道路表面平整,使其达到与设备要求上下浮动范围之内即可开始施工。
基于STM32CubeMX和HAL驱动库的嵌入式系统设计01-各章作业答案_13
100
b) 故为获取 10Hz 的方波,将计数器设定为如下参数(参数不唯一)
c) 这里用定时器输出PWM 波来模拟方波,使用定时器 3 的通道一输出PWM,对应引脚为(PA6)
d) 将 PWM 的比较值设置为计数器重载值的一半,以此产生占空比为 50%的 PWM 波,即所需的方波。
e) 在初始化代码的后面添加PWM 启动代码。
第七章作业
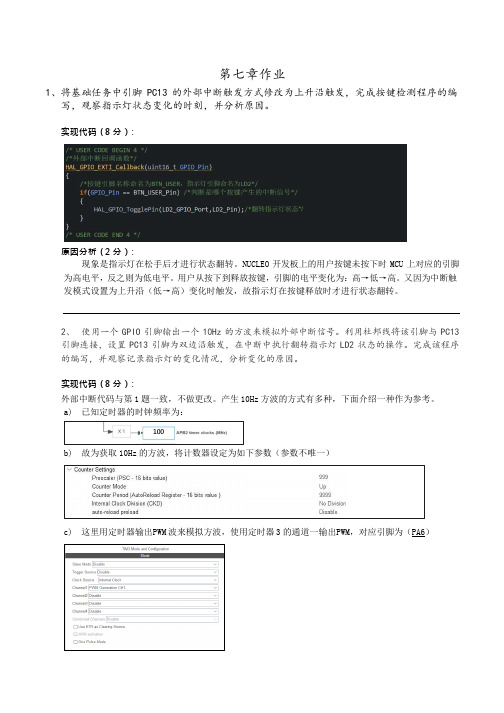
1、将基础任务中引脚 PC13 的外部中断触发方式修改为上升沿触发,完成按键检测程序的编 写,观察指示灯状态变化的时刻,并分析原因。
实现代码(8 分):
原因分析(2 分): 现象是指示灯在松手后才进行状态翻转。NUCLEO 开发板上的用户按键未按下时 MCU 上对应的引脚
为高电平,反之则为低电平。用户从按下到释放按键,引脚的电平变化为:高→低→高。又因为中断触 发模式设置为上升沿(低→高)变化时触发,故指示灯在按键释放时才进行状态翻转。
b) 在初始化函数后调用以下函数,激活 TIM10 的中断模式。
c) 定义一个变量用于计数:
d) 添加中断回调函数,并在函数里面添加定时后要执行的操作,这里是翻转指示灯:
第八章作业二
1、 修改呼吸灯程序,实现指示灯从暗到亮又从亮到暗的渐变,并重复该过程。 实现代码: a) 时钟配置:
安全生产10不吊

安全生产10不吊
一、不吊嵌入操作:操作人员在进行高空作业时,应严禁用吊车等设备进行嵌入式操作,以免造成设备损坏、人员伤亡等安全事故。
二、不吊过量载重:在进行吊装作业时,应按照设备的额定载重进行操作,严禁超载作业,以免造成设备过载,引发事故。
三、不吊不良品:在进行吊装作业时,应对所吊载物进行严格检查,有问题的不良品应立即通知相关人员处理,严禁将不良品进行吊装,以免引发事故。
四、不吊悬挂不牢固物品:在进行吊装作业时,应确保所吊载物的悬挂点牢固可靠,严禁使用不牢固的吊索、吊钩等设备进行吊装,以免导致吊装物品掉落、伤人等安全事故。
五、不吊压破气体容器:在进行吊装作业时,严禁吊装压破、损坏的气体容器,以免引发爆炸、中毒等危险。
六、不吊高温物品:在进行吊装作业时,应切勿吊装高温物品,以免造成设备受热损坏、人员烫伤等安全事故。
七、不吊尖锐物品:在进行吊装作业时,应切勿吊装尖锐物品,以免发生物品脱落、伤人等安全事故。
八、不吊有飞溅物品:在进行吊装作业时,应切勿吊装有飞溅危险的物品,以免造成人员眼睛、皮肤等部位受伤的事故。
九、不吊有磁性物品:在进行吊装作业时,应切勿吊装有磁性的物品,以免对设备产生干扰、损坏等安全问题。
十、不吊未标明重量的物品:在进行吊装作业时,应切勿吊装未标明重量的物品,以免造成设备过载、事故发生等危险。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 分析归纳TPM、PIT、LPTMR、RTC各定时器模块的功能及应用场合,列表说明。 功能 应用场合
TPM TPM共有三个模块,TPM0、TPM1、TPM2,TPM0有6个通道,TPM1和TPM2只有2个通道。TPM支持输入捕捉、输出比较,并能产生脉宽调信号(PWM)来控制电机。通过异步时钟源,可以让计数器、输出比较和捕捉寄存器工作在低功耗模式下,所以KL25的TPM模块又可以称为LPTPM。 TPM是递增计数器,通过设定模块的溢出值,当计数器达到该数值时产生中断。输入捕捉功能靠中断来实现。
PIT 周期中断定时器模块PIT是一组可以用于产生中断和触发器DMA通道定时器。该模块的中断都是可屏蔽的,每个定时器都有独立的溢出周期,此外,周期终端定时器模块没有外部引脚。PIT的基本操作有: 1.定时器:当使能时,定时器定期产生触发 2.调试模式:调试模式下,定时器由MCR[FRZ]决定是否冻结 3.中断:所有定时器都支持中断的产生 PIT可实现定时中断功能。
LPTMR 低功耗定时器LPTMR可以被配置成具有可选预分频因子的定时计数器,也可以被配置成带有脉冲干扰滤波器的脉冲计数器。绝大多数的系统复位都不会影响其继续使用,可以用作天数计数器。LPTMR模块共有5种操作模式,即运行模式、等待模式、停止模式、低漏电模式和调试模式。在这五种模式下,LPTMR都可以正常工作。在等待模式、停止模式、低漏电模式下,可以通过配置LPTMR,产生一个中断请求,退出低功耗模式。 LPTMR可应用于脉冲技术和定时中。
RTC 实时时钟RTC模块是一个独立供电的模块,在芯片掉电时由备用电源供电,确保RTC计时器正常运行,保持RTC寄存器运行状态。RTC模块主要包含外部晶体振荡器、POR块、RTC计时器以及自身的软件复位控制位。外部晶体振荡器为RTC计时器或其他外设提供32.768kHz的时钟;POR块在RTC模块上电时产生一个上电复位信号,将所有的RTC寄存器初始化为默认状态;RTC计时器由一个具有报警功能的32位秒寄存器和一个具有补偿功能的16位预分频寄存器组成;RTC自身的软件复位控制位,也会初始化所有的RTC寄存器。在VBAT掉电或POR中断时,不允许访问RTC任何寄存器(除控制寄存器),否则将产生总线错误。 RTC可应用在日历和闹钟历。 2. 编写DAC模块程序,分别配置缓冲区操作模式为缓冲区正常模式和缓冲区单次扫描模 式,完成三角波发生器功能。 // DAC驱动程序 typedef struct { DACx dacx; // 配置DAC模块号 DAC_MemMapPtr DACx_Base_Ptr; // 选择DAC通道号 unit8_t Water_Mark_Mode; // 选择水印模式的数字 unit8_t Buffer_Enable; // 配置buffer缓冲区使能 unit8_t Buffer_Mode; // 配置buffer缓冲区的模式 unit8_t Triger_Mode; // 配置触发器模式 unit8_t Buffer_Init_Pos; // 配置buffer缓存区的起始位置 unit8_t Buffer_Up_Limit; // 配置buffer缓冲区的最大长度 unit8_t DAC_irqc; // 选择DAC中断模块 DAC_ISR_CALLBACK isr_func; // 设置回掉函数 }LPLD_DAC_Cfg_t;
// 对DAC_Config进行默认配置 unit8_t LPLD_DAC_Init(LPLD_DAC_Cfg_t *DAC_Config) { // 水印模式的字数默认为一个字节 if(DAC_Config -> Water_Mark_Mode == NULL) DAC_Config -> Water_Mark_Mode = WATER_MODE_1WORD;
// 缓冲区使能默认为禁用缓冲区 if(DAC_Config -> Buffer_Enable == NULL) DAC_Config -> Buffer_Enable = BUFFER_DISABLE;
// 缓冲区模式默认为正常模式 if(DAC_Config -> Buffer_Mode == NULL) DAC_Config -> Buffer_Mode = BUFFER_MODE_NORMAL;
在单次扫描模式下,这里改为BUFFER_MODE_ONETIMESCAN; // 触发模式默认为无触发模式 if(DAC_Config -> Triger_Mode == NULL) DAC_Config -> Triger_Mode = TRIFER_MODE_NONE;
// 缓冲区的起始位置默认为0 if(DAC_Config -> Buffer_Init_Pos == NULL) DAC_Config -> Buffer_Init_Pos = 0;
// 缓冲区的最大值为16 if(DAC_Config -> Buffer_UP_Limit == NULL) DAC_Config -> Buffer_Up_Limit = 15;
// 中断方式默认为不开中断 if(DAC_Config -> DAC_irqc ==NULL) DAC_Config -> DAC_irqc = 0;
// 配置DMA寄存器 return LPLD_DAC_Config(DAC_Config); }
// 设置DAC通道的缓冲区数据 void LPLD_DAC_Set_Buffer(DACx dacx,unit8 DACx_DATn,unit16 data16) { // 配置端口基地址 DAC_MemMapPtr dacptr = DAC_Ptr[dacx]; // 配置DAC缓存区地址好 DAC_DALT_REG(dacptr,DACx_DATn) = (data16 &0x0ff); // 配置相应缓冲区的数据 DAC_DATH_REG(dacptr,DACx_DATn) = (data16 &0xf00)>>8; }
// 定义初始化结构体 LPLD_DAC_Cfg_t dac_config; // 三角波函数 void main (void) { int i=0,j; char delta=1; // 选择DAC0,DAC0引脚输出 dac_config.DACx_Base_Ptr = DAC0_BASE_PTR; LPLD_DAC_Init(&dac_config); while(1) { if(i==0) delta=1; else if(i==4095) delta=1; i+=delta; LPLD_DAC_Set_Buffer(DAC0,0,i); for(j=0;j<10;i++) } // 上述代码决定每次循环的输出值是增还是减,因为我们要输出三角波,因 // 此不管波形的增加还是减小,它都是线性变化的,当到达底部后,让每次 // 变化为递增DELTA,当达到顶部后,让每次变化为递减DELTA,这个DELTA // 值默认设置为1 } 3. 从从机的接入、时钟控制、数据传输速度、是否可以实现多主控、作用领域 等方面比较 SPI和I2C。 SPI I2C
从机的接入
SPI是典型的“主机-从机”系统。一个SPI系统。由一个主机和一个或多个从机构成,主机启动一个与从机的同步通信,从而完成数据的交换。提供SPI串行时钟的SPI设备称为SPI主机或者主设备,其他设备则成为SPI从机或者从设备。在MCU扩展外设结构中,仍然使用主机-从机的概念,此时MCU必须工作于主机方式,外设工作于从机方式。 为了消除I2C总线系统中主机与从机的地址选择线,最大限度地简化总线连接线,I2C采用了独特的寻址约定,规定了起始信号后的第一个字节为寻址字节,用以寻址从机并规定数据传送方向。 方向位为0时,表示主机将数据写入从机,方向位为1时反之。主机发送起始信号后,立即发送寻址字节,这时总线上的所有器件都将寻址字节中的7位地址与自己器件的地址相比较。如果两者相同,则该器件认为被从机寻址,并发送应答信号,从机根据数据方向位确定自身是发送器还是接收器。
时钟 控制
SPI的数据传输是在时钟信号SCK的控制下完成的。数据传输过程涉及时钟相位与时钟极性两个概念。时钟极性是指时钟信号在空闲时是高电平还是低电平,所谓时钟相位是指时钟信号SCK的第一个沿边出现在第一位数据传输周期的中央位置还是开始位置。主机和从机必须使用同样的时序模式才能正常通信。总体要求是:确保发送数据在一周期开始的时刻上线,接收方在1/2周期的时刻从线上读取,这样是最稳定的通信方式。 如果某从设备在时钟的上升沿输入数据,在下降沿输出数据。那么,主机的SPI时钟配置应为在时钟的上升沿输出数据,下降沿输入数据,因此主设备SPI时钟极性应配置为下降沿有效。只有正确地配置时钟极性和时钟相位,数据才能够被准确地发送和接收。因此必须严格对照从设备的SPI接口时序来配置主设备时钟。 在四种状态下进行时钟控制。 开始信号START: 当SCL为高电平时,SDA由高电平向低电平跳变,产生开始信号。当总线空闲的时候,主机通过发送开始信号START建立通信。 停止信号STOP: 当SCL为高电平时,SDA由低电平向高电平跳变,产生停止信号。主机通过发送停止信号,结束时钟信号和数据通信。SDA和SCL都将被复位为高电平状态。 重新开始信号Repeated START: SCL为高电平时,SDA由高电平向低电平跳变,产生重新开始信号,它的本质就是一个开始信号。 应答信号A: 应答信号是在发送了8个数据位之后,第9个时钟周期出现的,这时主机必须在这一时钟位上释放数据线,由接收设备拉低SDA电平来产生应答幸好或者由接收设备保持SDA的高电平来产生非应答信号,一个完整的字节数据传输需要9个时钟脉冲。