混合电动汽车模糊控制策略仿真分析
基于T-S模糊控制的纯电动汽车换档规律研究

仿真结果表明:T-S模糊换档控制方法在整车仿真过程中相对传 统换档控制方法仿真速度上有很大的提升;T-S模糊换档控制方 法在三种行驶模式下换档策略区分明显,相对传统控制方法较同 一,并且在各行驶模式下相对传统换档规律在换档的平顺性上, 车速跟随与经济性上均有所提升。
提出了基于T-S模糊控制的换档规律方法,在加速踏板开度中加 入了加速踏板开度变化率构成驾驶员意图,以T-S模糊控制制定 驾驶员意图与车速的双参数换档规律,并对模糊控制器进行了建 模。在换档控制模型中加入了电机通断模块提升换档平顺性。
应用传统换档控制模型与基于T-S模糊的换档控制模型分别构建 成整车控制模型。从单参数换档规律进行仿真,再将传统换档规 律控制器与T-S模糊控制器分别控制两档AMT纯电动汽车模型,分 别从动力性、经济性与综合性行驶模式进行仿真,并对两种换档 策略下的动力性、经济性与综合性行驶模式进行横向对比,最后 对传统换档规律与T-S模糊换档规律的三种行驶模式分别进行纵 向对比。
基于T-S模糊控制的纯电动汽车换档规 律研究
目前搭配两档变速器的纯电动汽车换档控制策略方面主要是传 统的图解法与解析法,控制策略相对较单一,通过电机的特性从 而来研究换档规律,并没有严格意义上的仿真对比。本文通过对 两档AMT纯电动汽车的整车建模,提出T-S模糊控制策略并进行仿 真对比研究,具体展开以下研究。
ISG混合动力汽车控制策略研究及仿真

ISG混合动力汽车控制策略研究及仿真
王峰;袁银南;王忠
【期刊名称】《机械设计与制造》
【年(卷),期】2009(000)001
【摘要】混合动力汽车在节能减排方面体现了巨大的优势,成为当前的研究热点.对于混合动力汽车而言,制定合适的控制策略是实现整车良好性能的关键.介绍了用于ISG型并联混合动力汽车的几种控制策略,详细分析了各种控制策略的控制思想,并通过仿真对各种控制策略下汽车的性能进行了对比研究.
【总页数】3页(P203-205)
【作者】王峰;袁银南;王忠
【作者单位】江苏大学,汽车与交通工程学院,镇江,212013;江苏大学,汽车与交通工程学院,镇江,212013;江苏大学,汽车与交通工程学院,镇江,212013
【正文语种】中文
【中图分类】TH16;U469.7
【相关文献】
1.ISG混合动力汽车模型预测控制策略研究 [J], 赵韩;吴迪
2.ISG混合动力汽车控制规则优化与转矩分配策略研究 [J], 周奇勋;曹世宏;季新杰
3.ISG混合动力汽车制动力动态协调控制策略研究 [J], 李清纯;颜景斌;王旭东
4.串联式混合动力汽车能量控制策略研究与仿真分析 [J], 张丹;李治国;陈标
5.ISG型混合动力汽车模糊控制策略及仿真 [J], 胡洪祥;秦大同;舒红;杨亚联;丁李辉
因版权原因,仅展示原文概要,查看原文内容请购买。
并联混合动力汽车模糊逻辑控制策略的设计

汽 车整 车控 制系 统 的核心 。早 期 的控制 策略 大 多是 基 于速 度 的控制 , 因其 没有 充 分 利用 混 合 动 力 系 但 统 的优 势 ,通常 整 车 的燃 油 经 济性 不 是最 优 的 , 而 且 还没 有 考 虑排 放 , 以现在 的控 制策 略 基 本 上属 所
1 前 言
整 车 的能 量 管 理 和 动 力 控 制 策 略 是 混 合 动力
标 首 先是 尽 可 能维 持 发 动 机在 最 优 曲线上 运 转 , 只 有 当 电池 的 S C不 足 或 过 高 以 及 电 机不 能 满足 整 O 车扭 矩要 求 时 , 发动 机 的工作 点才 偏 离最优 曲线 ; 同 时还要 保 持 电机 工作 高 效 , 并维 持 电池 的 S C在其 O
ee tc v hceTh n u n up tv r be fc nrlu i ae s lce n u z nee c ntwi 5 rls i lcr e il. e ip ta d o tu a a lso o to nt r ee td a d a fzy ifrn e u i t 2 ue s i i h
维普资讯
-
设计 ・ 计算 ・ 研究 ・
并联混合动力汽车模糊逻辑控制策略的设计
赵 立 新 左 曙光 吕胜 利
( 同济 大学 )
【 摘要 】 利用模糊逻辑控制技术 , 设计 了并联混合动力汽车的模糊逻辑扭矩控制策 略。选取 了控制器的输入 、 输
a d h s p w ru d p i ea i t n o u t e s n a o e f la a t b l ya d r b sn s . v i
K e r s Hy rd ee t i e il , u z o i , n r l sr t g y wo d : b i l c rc v h c eF z y l g c Co t o t a e y
太阳能混合动力电动汽车驱动系统及模糊控制

新能源汽车A版太阳能混合动力电动汽车驱动系统及模糊控制祁俊荣 钟绍华 (武汉理工大学)【摘要】 能源危机和环境污染是当今世界面临的两大问题,太阳能电动车将对解决面临的能源危机和环境污染具有重大意义。
受技术和天气因素的影响,需要将其和传统的发动机结合成混合动力电动汽车。
文章对太阳能动力电动汽车驱动系统进行简要设计,并对其控制策略进行简要分析,提出了一种变结构模糊控制系统。
【主题词】 电动汽车 混合动力 驱动系统 20世纪90年代以来,全球性的石油危机及大气污染使汽车的节能和环保性能日益得到重视。
特别对于汽车密集、交通拥挤的大城市而言,汽车频繁起停造成的内燃机变工况(特别是低速怠速)运行是造成尾气排放严重、耗油高的主要原因。
环境保护呼声的高涨和石油储量日益短缺的压力,迫使人们重新考虑未来汽车问题,清洁、环保、节能和可再生的新能源汽车已成为世界汽车工业发展的热点。
相对于石油、天然气等不可再生能源而言,太阳能是一种取之不尽、用之不竭的“绿色”可再生能源。
因此,本文设计了太阳能电机和内燃发动机混合驱动的太阳能混合电动汽车驱动系统,并对其控制系统进行了分析。
1 驱动系统构成及工作原理太阳能混合动力电动汽车驱动系统的结构如图1图1 太阳能混合动力驱动系统结构图 延,使车市流通业态有了一个很平稳的过渡,厂家和商家均有充足的时间双向选择。
2005年轿车市场的上述积极变化,为2006年轿车市场继续保持平稳增长打下了较好的基础;同时,下面的一些因素也将有利于汽车市场的健康发展:2006年是“十一五”规划的第1年,国家将继续保持宏观经济政策的连续性和稳定性,继续实施稳健的财政政策和货币政策,政策环境总体向好;国家继续执行“鼓励汽车进入家庭”的政策,私车市场将继续发展。
国家综合管理部门的收稿日期:2006-03-06智囊机构建议,2006年将实施“稳房促车”的消费政策;2006年我国的整车关税将降至25%,零部件平均关税降到10%;同时,还取消外资进入我国服务贸易领域的限制。
基于ADVISOR二次开发的Plug-in HEV模糊控制研究

基于ADVISOR二次开发的Plug-in HEV模糊控制研究谭德荣;孙静霞;王兴伟【摘要】Based on the characteristics of plug-in hybrid electric vehicle, PHEV optimal fuzzy control was proposed. The engine operating points were controlled on optimal fuel consumption curve. On the basis of the power request and SOC, the fuzzy controller could distribute the engine given power and the condition of SOC drop with insufficient of energy recovery was improved to realize constant SOC control. Furthermore, ADVISOR was developed by fuzzy control model embedding and simulated under different driving cycle. The study proved that PHEV optimal fuzzy control could realize the constant SOC control under road conditions, so that it has good robustness.%针对插电式混合动力电动汽车(PHEV)运行特点,提出了PHEV最优模糊控制策略.模糊控制器将发动机的工作点控制在发动机最小燃油消耗的高效率区间内,使发动机具有较好的燃油经济性.根据路况功率需求和蓄电池SOC,调节发动机给定功率,并对能量回收不足SOC下降的情况进行改进,实现电池SOC平衡控制.将建立的模糊控制模型嵌入ADVISOR仿真软件,进行二次开发,在不同工况下进行仿真实验.结果表明:PHEV最优模糊逻辑控制具有较好的鲁棒性,在能量回收不足工况下实现电池SOC平衡,且具有较好的燃油经济性.【期刊名称】《重庆交通大学学报(自然科学版)》【年(卷),期】2011(030)005【总页数】5页(P1054-1058)【关键词】插电式混合动力电动汽车;仿真;控制策略;模糊控制【作者】谭德荣;孙静霞;王兴伟【作者单位】山东理工大学交通与车辆工程学院,山东淄博255049;山东理工大学交通与车辆工程学院,山东淄博255049;山东理工大学交通与车辆工程学院,山东淄博255049【正文语种】中文【中图分类】U469.72随着社会的进步、科技的发展,面对传统汽车亟待解决的一系列问题,具有改善油耗、降低排放等优势的混合动力电动汽车(HEV)开始大范围的推广。
混合动力电动汽车再生制动控制策略

优化方向与目标
1 2 3
提高制动效能稳定性
通过优化控制策略,使混合动力电动汽车在各种 行驶条件下都能提供稳定、可靠的制动效能。
最大化能量回收
优化控制策略以实现在制动过程中尽可能多地回 收和储存能量,从而提高混合动力电动汽车的能 效。
增强自适应能力
改进控制策略,使其能够根据驾驶环境和驾驶风 格的变化自适应调整,以实现最佳的制动性能和 能量回收效果。
控制策略具体实现步骤
1. 采集车辆状态信息
实时获取车速、轮速、电池荷电状态等车辆状态信息。
2. 分析驾驶员意图
通过制动踏板行程、踏板力等信息,判断驾驶员的制动意图。
3. 评估路况信息
利用车载传感器或外部数据源,获取当前道路坡度、路面附着系数 等路况信息。
控制策略具体实现步骤
4. 计算制动力分 配比例
针对再生制动系统的控制策略进行优化,能够显著提升混合动力电动汽
车在制动过程中的稳定性和效率,提高驾驶的舒适性和安全性。
03
多种因素影响制动效果
研究还发现,再生制动系统的性能受到多种因素的影响,包括电池状态
、驾驶员的制动习惯、道路条件等,这需要在实际应用中加以考虑。
对未来研究的展望
更精细化的控制策略
控制策略的目的和意义
提高再生制动效率
控制策略的优化能够实现制动能 量的高效回收和再利用,从而提 高再生制动的效率,为汽车的节
能和环保性能做出贡献。
保障行驶安全
控制策略需要确保再生制动与传统 制动的协调配合,确保汽车在制动 过程中的稳定性和安全性。
推动技术发展
对控制策略的研究和改进能够推动 HEV相关技术的进步和发展,为新 能源汽车产业的可持续发展注入新 的活力。
基于模糊控制的ISG-FHEV等效燃油消耗最小策略
基于模糊控制的ISG-FHEV等效燃油消耗最小策略付主木;刘晓真;周祥【摘要】针对ISG重度混合动力汽车,设计了一种基于模糊控制的等效燃油消耗最小策略,以提高发动机和电机驱动系统效率以及整车的燃油经济性.通过对整车等效燃油消耗的分析,构建了整车等效燃油消耗最小目标函数;引入模糊控制对等效因子进行调整,加强等效因子对行驶工况的适应性和对电池荷电状态的偏差控制.仿真结果表明,所设计的控制策略与常规ECMS相比,发动机效率提高8.3 %,电机驱动效率提高11.1 %,百公里耗油量降低8.4%.%In order to improve the driving efficiency of the engine and motor and the vehicle fuel economy further,an Equivalent Consumption Minimization Strategy(ECMS)based on fuzzy control is designed for a Full Hybrid Electric Vehicle assisted by an Integrated Starter Generator(ISG-FHEV). Firstly,based on the analysis of the equivalent fuel consumption of the vehicle,the equivalent fuel consumption minimization objective function is constructed. Secondly,the equivalent factor is adjusted by the introduction of fuzzy control to enhance the adaptability to the driving cycle and the deviation control of battery state of charge(SOC). The simulation results show that compared with the ECMS, the engine efficiency increases 8.3 %,motor driving efficiency increases 11.1 %,fuel consumption to travel 100 km decreases 8.4 %.【期刊名称】《火力与指挥控制》【年(卷),期】2017(042)010【总页数】6页(P103-108)【关键词】混合动力汽车;燃油经济性;等效因子;等效燃油消耗最小策略;模糊控制【作者】付主木;刘晓真;周祥【作者单位】河南科技大学信息工程学院,河南洛阳471023;河南省机器人与智能系统重点实验室,河南洛阳471023;河南科技大学信息工程学院,河南洛阳471023;河南科技大学电气工程学院,河南洛阳471023【正文语种】中文【中图分类】TP391.9作为轻中度混合动力汽车的组合,拥有ISG电机和主电机的ISG重度混合动力汽车(Full Hybrid Electric Vehicle assisted by an Integrated Starter Generator,ISG-FHEV),同时具有轻中度结构的特性和优点,不仅为发动机提供更多的电机助力,而且在行车充电和再生制动情况下均有较高的发电效率,对于提高发动机和电机驱动系统以及整车效率有着很大的潜力[1-2]。
混合动力汽车的能量控制策略

混合动力汽车的能量控制策略能量管理策略的控制目标是根据驾驶人的操作,如对加速踏板、制动踏板等的操作,判断驾驶人的意图,在满足车辆动力性能的前提下,最优地分配电机、发动机、动力电池等部件的功率输出,实现能量的最优分配,提高车辆的燃油经济性和排放性能。
由于混合动力汽车中的动力电池不需要外部充电,能量管理策略还应考虑动力电池的荷电状态(SOC)平衡,以延长其使用寿命,降低车辆维护成本。
混合动力汽车的能量管理系统十分复杂,并且因系统组成不同而存在很大差别。
下面简单介绍3种混合动力汽车的能量管理策略。
1、串联式混合动力汽车能量管理控制策略由于串联混合动力汽车的发动机与汽车行驶工况没有直接联系,因此能量管理控制策略的主要目标是使发动机在最佳效率区和排放区工作。
为优化能量分配整体效率,还应考虑传动系统的动力电池、发动机、电动机和发电机等部件。
串联式混合动力汽车有3种基本的能量管理策略。
(1)恒温器策略当动力电池SOC低于设定的低门限值时,起动发动机,在最低油耗或排放点按恒功率模式输出,一部分功率用于满足车轮驱动功率要求,另一部分功率给动力电池充电。
而当动力电池SOC上升到所设定的高门限值时,发动机关闭,由电机驱动车辆。
其优点是发动机效率高、排放低,缺点是动力电池充放电频繁。
加上发动机开关时的动态损耗,使系统总体损失功率变大,能量转换效率较低。
(2)功率跟踪式策略由发动机全程跟踪车辆功率需求,只在动力电池SOC大于设定上限,且仅由动力电池提供的功率能满足车辆需求时,发动机才停机或怠速运行。
由于动力电池容量小,其充放电次数减少,使系统内部损失减少。
但是发动机必须在从低到高的较大负荷区内运行,这使发动机的效率和排放不如恒温器策略。
(3)基本规则型策略该策略综合了恒温器策略与功率跟踪式策略的优点,根据发动机负荷特性图设定高效率工作区,根据动力电池的充放电特性设定动力电池高效率的SOC范围。
同时设定一组控制规则,根据需求功率和SOC进行控制,以充分利用发动机和动力电池的高效率区,使两者达到整体效率最高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(研究生课程论文)汽车动力学论文题目:混合电动汽车模糊控制策略仿真分析2014年1 月4 日混合电动汽车模糊控制策略仿真分析摘要:本文以ADVISOR软件中本田In sight的整车模型为研究对象,该车型搭载了ISG启动电机,是一款典型的并联式混合动力汽车。
文章首先对其主要模块:车辆动力学、发动机、电机和蓄电池的仿真模型进行了详细地数学建模分析。
然后基于后向仿真的原理在MATLAB/SIMULINK 环境中建立了模糊逻辑的控制策略。
对ADVISOR软件进行二次开发,将建立的控制策略嵌入到ADVISOR操作系统中进行仿真测试。
最后,在ADVISOR的GUI界面中选择1.0L、41kW的发动机和10kW的电机,选择典型城市道路循环工况(UDDS )对模糊控制策略进行性能仿真,验证该控制策略下车辆的动力性、燃油经济性与排放性能并记录仿真结果。
关键词:混合动力电动汽车、ISG、ADVISOR、控制策略、后向仿真Abstract: The paper takes Honda In sight parallel hybrid electric vehicle (HEV) as the research subject, which is assisted by an integrated starter generator. We firstly mathematical modelingandanalyzing the main units oftheInsight vehicle simulation model (such as: the vehicle dynamics module, engine module, and motor controller module) in the ADVISOR software, the n formulates the Rule-based Con trol Strategy and the Fuzzy Logic Con trol Strategy in the MATLAB/SIMULINK environmentbased on the Backward Simulation principle. In order to embed the two control strategies into the operating system of ADVISOR, the paper redeveloped the ADVISOR2002 for the off-line simulation of the twocontrol strategies. Finally, we chose1.0L, 41kW engine and 10kW motor in theGUI in terface of ADVISOR, test the vehicle ' fuel economy, emissi on, and power performa nee in the UDDS con diti ons, and recorded the simulati on results in the table.Keywords:Hybridelectric vehicle; ISG; ADVISOR; control strategy; backward simulatio n1仿真软件MATLAB/SIMULINK 及ADVISOR的介绍1.1 MATLAB/SIMULINK 简介MATLAB的全称是矩阵实验室。
不仅具有强大的数值计算能力,它还可以提供了专业的文字处理、符号计算、实时控制和可视化建模仿真等功能。
SIMULINK是MATLAB软件下的一个模块,它主要是用来对动态系统各种信号流进行建模、仿真计算和结果分析的MATLAB软件包。
SIMULINK在混合动力汽车模拟仿真过程中的主要作用是:利用提供的现有模块对混合动力系统近似建模、仿真和分析,可以在设计之初,根据仿真结果对模型进行调整和修改,也对设计的参数选定有一定的帮助,对控制系统也能进行一定的优化。
1.2 ADVISOR 简介ADVISOR是美国能量部为了便于管理一些关于混合动力的动力系统的项目在二十世纪九十年代基于MATLAB开发的,并在1998年命名为ADVISOR⑴,ADVISOR的主要功能有以下几点:(1)ADVISOR的主要功能是模拟各种汽车(传统汽车,电动汽车等)在整个循环工况中的车辆动力性能、经济燃油性指标以及排放指标,并具有强大的动力性分析、能量流分配分析、效率数据分析能力[2]。
(2 )可用来对设计参数的优化匹配,包括整车质量、滚动阻力系数、变速比等,为优化整车及车辆各部件参数提供一定的参考,也可输入动力性、燃油经济性等车辆指标,自动优化匹配车辆参数,如变速 器速比等⑴。
(3) 对于电动汽车,可以用来研究其控制策略及参数的匹配,以及变速器换挡规律和车辆动力性能。
(4) 该软件的开放平台使出了在软件原有的车型外,用户可根据实际情况修改现有车型参数,以及 各部件模块等,建立用户需求的车型,进行仿真分析。
2混合动力电动汽车主要部件建模分析本文直接采用 ADVISOR 软件中自带的日本本田In sight 单轴并联式混合动力电动轿车模型。
In sight的动力系统以汽油机为主动力,电机为辅助动力,结构特点是发动机和电机在一根轴上混合。
在车辆启动 和加速时,辅助电机发挥了低速大转矩的优点,弥补汽油机低速、启动加速差的缺点;在减速和制动时电 机作为发电机,实现制动能量回收功能。
在车辆短时间停车时,发动机关闭取消怠速,在加速踏板踩下后 重新启动[2]。
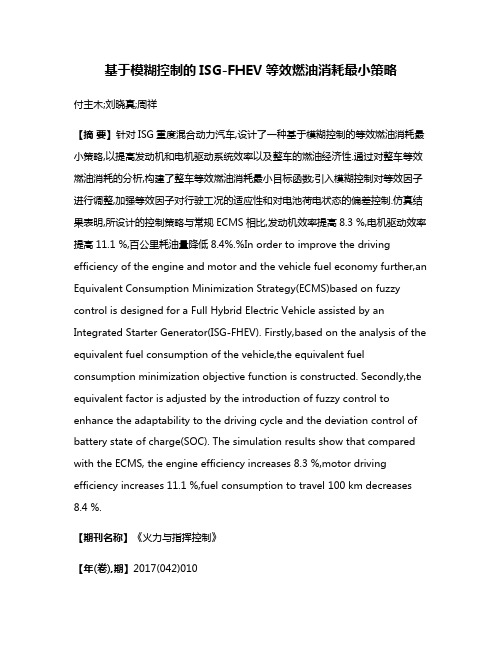
2.1车辆动力学模型图1车辆动力学模型该模块根据汽车动力方程 F = v ma进行计算,其中合力包括滚动阻力、空气阻力、加速阻力和坡度trsetivs linear(M)花mux■>Ta JVDrtsii 住DemuxT►vt-h_tpd_iSumireq d ccaarsjl ynamig drag (hvetiid-E : req d : st end cf time-血p |im®tractive ferae ardr tu_iired of tire and wheel(NJ. g)tu1-e<r>c<yE 却 4 I "Tip h)1(Bate 32 snd<wti>B ,l tire slip阻力。
该方程首先计算迭代步的加速度来计算所要求的后向驱动力,将迭代步骤开始处和末端处速度的平 均值作为平均速度。
汽车的实际速度可通过车速子模块计算出来。
车辆动力学顶层仿真模型如上图1所示。
假设汽车在坡度为t 的路面上行驶,可将整车视为一个整体,对其进行受力分析,如图mg图2车辆受力分析图车辆驱动力设为F v ,空气阻力为F w ,爬坡阻力为F i ,滚动阻力为F f ,根据牛顿第二定律,不考虑 前后轴的负荷转移,则整车的驱动力需求为F v t = F w t F i t F f t cos t F j (t)( 1)其中滚动阻力F f t 与车轮负载、形式和结构有关,空气阻力、爬坡阻力、加速阻力和滚动阻力可表 示为[9]:Fw(t)=^^C D A f2』F i(t )= gmsin Y(t )F f (t )=gm L 。
+%v 2(t )+c (2V 2(t )+c«3V 2(t )]F j (t)=亦包i jdt式中,为空气密度,v t 为车速,c D 为风阻系数, A f 为迎风面积,g 为重力加速度, m 为整车 质量,t 为坡度,亠,,…,:3为滚动系数,:为汽车旋转质量换算系数。
由此得到整车的驱动力为:2F vt = ——c DA fgmsin t F ft cos tmdu(3)2dt2所示。
(2)块和发动机燃油消耗及排放计算模块。
(1)发动机转矩计算模块发动机转矩计算模块主要考虑惯性损失和附件负荷的影响,输出转矩通常按下列公式计算:T out =max(T th ,mi n(「eq ,T max ))- T acc式中,T out 为该模块的输出转矩,Tm为发动机可提供转矩,Tacc为附件转矩,T th 为节气门关闭时转矩,T req 为需求转矩,T max 为发动机最大转矩。
(2 )发动机转速计算模块发动机的转速计算要考虑到离合器的状态、需求转速和发动机最大转速之间的关系。
该模块按照以下 几种情况分别对发动机的转速进行估算:离合器为啮合状态,并且前一个时间步长的轨迹错过了,发动机的估计转速为前一个时间步长的发动 机速度值; 从松开离合器踏板,到离合器接合前,发动机的估计转速为需求速度与发动机可提供的最大转速中的 较小值; 从踩下离合器踏板,到离合器脱离前,发动机的估计转速根据节气门关闭后的扭矩和发动机的转动惯 量来计算; 除了以上三种状态以外,其他情况下发动机的估计转速均等于需求转速、发动机可提供最大转速、发 动机怠速转速三者的最小值。
(3)燃油经济性和排放计算模块该模块计算发动机的油耗和排放:燃油消耗量为发动机燃油消耗率和发动机温度修正系数的乘积;单 位时间发动机排放为充分预热后发动机排放和温度修正系数的乘积。
2.2发动机模型图3发动机仿真模型发动机总成模型 (如图 3所示)还包括三个子系统,分别是发动机转矩计算模块、发动机转速估计模(4)TJ 日图4电机仿真模型电动机模型采用顺逆序相结合的计算方式,如 4,模型的功能为:在建模对象电机已知的情况下,根据电机需求转矩和电机需求转速,在一系列性能限制的条件下计算出电机需求输入电功率和电机的功率转 矩特性。
在顺序计算模型中,根据电机实际输入功率在考虑电机热交换影响的条件下,计算出电动机实际 可得到输出转矩和输出转速。
2.4蓄电池模型图5蓄电池仿真模型ADVISOR 中的蓄电池内阻模型根据动力总线的功率需求计算蓄电池荷电状态SOC,并输出可用功率。
功率损失是按内阻损失加上“库仑效率”定律确定的功率损失,自顶向下建立模型,如图 5。
对其中包含 的子模块功能描述如下:(1)电池开路电压和内阻计算模块:2.3电机/控制器模型P TIC n rn r»c in "I bnTc ftOrtBCSCE?Edmm >-eianaw*f*c of n*rli m[Un-ITK>lQ(/[XM7l]ICril±lEp㈣rwto? centra.Il*rflgir jn^fa^frGLMT 1FrOiTi 畑炉WHOTffldT ON?◎W_CH%— nia ■ pwrflrtfrti «rr1iG> puww nec|!diniQ bus (W}essj3wr_cui_f]To 卿or!啊肚儒power avAi^teteTOtMJ^fW]□剂厂Dem LXwiBiL4 and tpMrl IPq d Bt rotor fNrr)irscL's^ti5WE|;ifA l<Hit2-C L-L^jpT ■寻I 霍砂+&rrpurI W IT=2 I 日!:廷;Bim 5 r-£ i sb E mon jr srcccr drl . E ~nrq LE IF pu I ZH 血sr WH-m crvQ torqj a, pd/W Id r ivE icy Lie end 沖oadsigil, d rat»C TI & iiiyul a巧3iniDtnipme. H" B I 匚|ph (wp*«>2^igav«hm ®55JWrj3ULF T D门-| W JW 〔」Ka_d |caul effScrta =4Ti :n ; c gc>,匸;sdc*es£」2:ial 匚|| tui^cni8豁ch Ecd UnuTilr 芒汩ar tmtp该模块根据给定的当前的SOC值和蓄电池的功率需求来计算单个电池的开路电压和内阻。