半自动钻床工作机构设计详解
自动钻铰孔装置设计
说明书 第 Ⅰ 页
目 次 1 绪论 ................................................................ 1 1.1 自动钻孔技术的现状及发展趋势 ..................................... 1 1.2 钻铰孔装置简介 .................................................... 1 2 被加工工件的结构特点及技术要求 ...................................... 3 2.1 技术要求 .......................................................... 3 2.2 装置结构特点 ...................................................... 3 3 切削刀具分析 ........................................................ 4 3.1 麻花钻 ............................................................ 4 3.2 铰刀的选择 ........................................................ 5 3.3 钻削用量与参数选择 ................................................ 5 4 钻铰孔夹具设计 ...................................................... 8 4.1 钻铰孔夹具的特点 .................................................. 8 4.2 工件定位夹紧方案 .................................................. 9 4.3 夹紧机构 ......................................................... 14 5 回转工作台的方案确定 ............................................... 17 5.1 分度式工作台 ..................................................... 17 5.2 开环数控回转工作台 ............................................... 21 5.3 闭环数控回转工作台 ............................................... 23 5.4 双导程蜗杆传动 ................................................................. 25 5.5 回转工作台参数计算 ............................................... 26 6 装置控制系统设计 ................................................... 27 6.1 PLC装置介绍 ...................................................... 27 6.2 系统控制要求 ..................................................... 30 结 论 ................................................................ 32 致 谢 ................................................................ 33 参 考 文 献 ........................................................... 34
第四章_机械运动系统的方案设计
§ 4.4 机械运动系统工艺动作过程的构思与分解
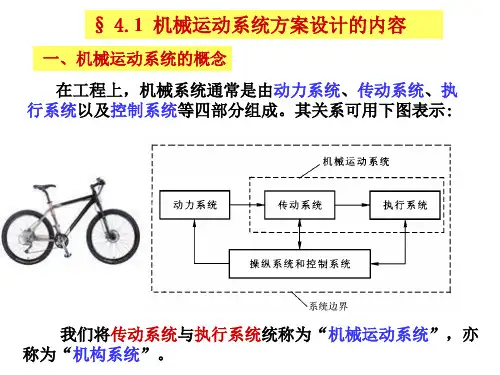
一、机械运动系统的工艺动作过程 机器的功能是通过其工艺动作过程来完成的。 例如图所示的工业缝纫机是通过①刺布→②供线→③勾线 →④送布的工艺动作过程来实现缝纫功能。
又如自动动作过程取决于工作原理,不同的工作原理就会有 不同的工艺动作来实现;有时,同样的工作原理也可以用不 同的工艺动作过程来实现,例如利用范成原理加工齿轮时, 滚齿机和插齿机二者的工艺动作过程是不同的。 一般来说,机器的工艺动作过程是比较复杂的,往往难 以用某一简单的机构来实现。因此,在机械运动方案的设计 中,常常需要把工艺动作过程分解成以一定时间序列表达的 若干个工艺动作,这些工艺动作则称之为机械的执行动作。 相应地,我们把机械中完成执行动作的构件,称为执行构件。 而把实现各执行构件运动的机构,称为执行机构。 所谓“工艺动作过程的构思与分解”,是指:从机械运 动系统的功能出发,根据工作原理构思出工艺动作过程,并 将工艺动作过程分解成若干可实现的执行动作,形成一系列 执行动作的时间序列。
功能合成是指将分功能与基本功能合成简单、明确的功能 结构。
二、举例
如:冲压式蜂窝煤成型机的总功能是:将粉煤加入转盘的 模筒内,经冲头冲压成蜂窝煤。
为了实现蜂窝煤冲压成 型,冲压式蜂窝煤成型机必 须完成五个分功能: ①粉煤加料; ② 冲头将蜂窝煤压制成型; ③清除冲头和出煤盘的积屑 的扫屑运动; ④将在模筒内的冲压后的蜂 窝煤脱模; ⑤将冲压成型的蜂窝煤输送。
指设计者根据设计任务书和已知 条件,通过建立功能结构、确定 工作原理、工艺动作过程的构思 与分解、机构的选型以及方案评 价等步骤,形成机械运动系统方 案的全过程。
机械产品的设计一般要经过产 品规划、方案设计、技术设计、 施工设计等几个阶段。通常,方案 设计是核心,它决定产品性能、 成本及竞争能力的关键环节。
浅析半自动磨边机的内部结构及原理

半自动磨边机之所以能以自动仿形磨削的方式完成镜片磨边等一系列相关工作,主要依靠其内部的各种机械机构以及电气结构。
半自动磨边机的内部结构如图1所示,主要包括模板踏板机构、砂轮进退机构、砂轮旋转机构、镜片轴夹紧机构、镜片轴旋转机构、进出水机构、稳压电源及其辅助电气元器件以及主板。
图1 半自动磨边机内部主要部件图1.模板踏板机构;2.砂轮进退机;3.砂轮旋转机构;4.镜片轴夹紧机构;5.镜片轴旋转机构;6.进出水机构;7.稳压电源及其辅助电气元器件;8.主板半自动磨边机内部结构的具体功能如表1所示:表1 半自动磨边机内部主要机构及功能分析表浅析半自动磨边机的内部结构及原理王英丽半自动磨边机是根据镜片材质(玻璃、树脂、PC等),尺寸大小,镜片形态(圆形片、小寸片、直角片等)、镜片边形(平边、尖边)等,通过主板电子电路控制磨边机进行适当机械运动后磨出和模板形状相同的眼镜镜片。
自动磨边工艺采用的是成形法磨边,金刚石砂轮的表面与镜架框槽沟呈110°角安装,使倒角均匀。
为了提高磨边效率,自动磨边机砂轮采用粗磨、精磨、倒角等组合砂轮。
本文将依次分析某司所生产的半自动磨边机工作原理。
1 模板踏板机构半自动磨边机按照实物形状进行自动仿形磨削,模板踏板机构不但提供了模板的装夹装置,还实现了对模板轮廓的信号采集与处理,即根据对模板轮廓的仿形将模板轮廓的相关信息转换为电信号传送给中央计算机,中央计算机根据不同的电信号发出指令进行加工。
模板踏板机构整体结构如图2所示,它主要包括模板装夹装置、电源线、模板踏板电机、模板踏板传感器、模板踏板、齿轮系与齿轮齿条结构、感应叶片与叶片测速传感器以及信号线等。
图2 模板踏板机构结构图其结构具体作用如下:a. 模板装夹装置:装夹模板;b. 电源线:电机供电线路;c. 模板踏板电机:为模板踏板的进退提供动力;158 中国眼镜科技杂志·1·2021d. 模板踏板传感器:一种电阻应变式传感器。
数控机床各个组成部分的工作原理及结构
数控机床各个组成部分的工作原理及结构第一节输入装置输入装置是整个数控系统的初始工作机构,它将准确可靠的接收信息介质上所记录的“工程语言"、运算及操作指令等原始数据,转为数控装置能处理的信息,并同时输送给数控装置。
输入信息的方式分手动输入和自动输入。
手动输入简单、方便但输入速度慢容易出错。
现代数控机床普遍采用自动输入,其输入形式有光电阅读机、磁带阅读机及磁盘驱动器以及无带自动输入方式.其它输入方式:1。
无带自动输入方式在高档数控机床上,设置有自动编程系统和动态模拟显示器(CRT).将这些设备通过计算机接口与机床的数控系统相连接,自动编程所编制的加工程序即可直接在机床上调用,无需经制控制介质后再另行输入。
2。
触针接触式阅读机输入方式又称为程控机头或电报机头,结构简单,阅读速度较慢,但输入可靠、价格低廉故在部分线切割机床加工中仍在用。
3。
磁带、磁盘输入方式磁带输入方式进行信息输入,其信息介质为“录音"磁带,只不过录制的不是声音,而是各种数据。
加工程序等数据信息一方面由微机内的磁盘驱动器“写入”磁盘上进行储存,另外也由磁盘驱动器进行阅读并通过微机接口输入到机床数控装置中去。
第二节数控装置数控装置是数控机床的核心,数控机床几乎所有的控制功能(进给坐标位置与速度,主轴、刀具、冷却及机床强电等多种辅助功能)都由它控制实现。
因此数控装置的发展,在很大程度上代表了数控机床的发展方向。
数控装置的作用是接收加工程序等送来的各种信息,并经处理分配后,向驱动机构发出执行的命令,在执行过程中,其驱动、检测等机构同时将有关信息反馈给数控装置,经处理后,发出新的命令。
一、数控装置的组成1、数字控制的信息1)几何信息——是指通过被加工零件的图样所获得的几何轮廓的信息。
这些信息由数控装置处理后,变为控制各进给轴的指令脉冲,最终形成刀具的移动轨迹。
几何信息的指令,由准备功能G具体规定。
2)工艺信息———通过工艺处理后所获得的各种信息。
其它机床
�
三,磨床 工作特点,高速旋转,皮带传动,液压传动….. 1, 工作特点,高速旋转,皮带传动,液压传动 .. 2, 关键结构: 短三瓦动压液体滑动轴承, 安全机 关键结构 : 短三瓦动压液体滑动轴承 , 构,内圆磨具轴向定位 考虑如何提高磨削精度,光洁度….. 3, 考虑如何提高磨削精度,光洁度 .. 四, 齿轮加工机床 了解圆柱齿轮的加工方法, 1, 了解圆柱齿轮的加工方法,加工原理 分析滚齿机,插齿机,磨齿机的传动链; 2, 分析滚齿机,插齿机,磨齿机的传动链; 挂轮机构,合成机构的作用及原理; 3, 挂轮机构,合成机构的作用及原理; 锥齿轮加工原理:平面,平顶齿轮概念; 4,锥齿轮加工原理:平面,平顶齿轮概念;刨齿机 原理; 原理;
二,车床部分:1,了解基本运动;2,分 车床部分: 了解基本运动; 析传动原理; 了解加工螺纹种类; 析传动原理;3,了解加工螺纹种类;4, CA6140典型结构 卸荷机构, 典型结构; CA6140典型结构;卸荷机构,扩大螺距机 挂轮机构,安全互锁机构…… 构,挂轮机构,安全互锁机构 CK3263工作特点 5,CK3263工作特点,脉冲发生器原理及特 CK3263工作特点, 点. CM1107单轴纵切自动机 6,CM1107单轴纵切自动机:工作特点,主 CM1107单轴纵切自动机:工作特点, 要机构,离合器,分配轴, 要机构,离合器,分配轴,调整卡内容及 作用; 作用;
图5—11 单柱坐标镗床
(2) 双柱坐标镗床
1—工作台 3,6—立柱 5—主轴箱 8—床身 2—横梁 4—顶梁 7—主轴
图5—12 双柱坐标镗床
(3) 卧式坐标镗床
1—上滑座 2—回转工作台 3—主轴 4—立柱 5—主轴箱 6—床身 7—下滑座
图5—13 卧式坐标镗床
电钻的结构组成

电钻的结构组成电钻是一种常见的电动工具,由多个部件组成。
下面将从电钻的结构组成进行详细介绍。
一、外壳部分电钻的外壳部分通常由塑料或金属材料制成,用于保护内部机械和电气部件。
外壳上通常有握把,方便用户握持和操作。
二、电机部分电钻的核心部件是电机,通常采用直流电动机或交流电动机。
电机通过电源提供动力,使电钻旋转。
电机由定子和转子组成,定子固定在电钻的外壳内,转子与钻头相连,通过旋转带动钻头进行钻孔。
三、换向器部分为了使电机可以正常运转,电钻内部需要一个换向器。
换向器由多个碳刷和换向环组成,碳刷与电机的转子接触,通过不断换向,使电流改变方向,从而使电机保持旋转。
四、齿轮部分电钻通常配备齿轮机构,用于调节转速和扭矩。
齿轮一般由金属材料制成,通过大小齿轮的组合,可以实现不同的转速和扭矩输出。
齿轮机构通常位于电钻的机身内部。
五、离合器部分电钻的离合器是一个重要的安全装置。
离合器的作用是在电钻遇到阻力时,自动切断电机的动力输出,防止电钻反弹或损坏。
离合器的灵敏度可以通过调节设置来实现不同的扭矩输出。
六、速度控制部分为了满足不同工作需求,电钻通常具有可调节的转速控制功能。
速度控制部分可以通过按钮、滑动开关或变压器等方式实现。
用户可以根据具体工作要求选择合适的转速。
七、钻头部分电钻的钻头是用于钻孔的工具,通常由高速钢或硬质合金制成。
钻头的直径和类型可以根据具体需求选择,常见的有直钻头、扁钻头和螺纹钻头等。
八、附件部分电钻通常配备一些附件,如螺丝刀头、扳手、钻孔导向器等。
这些附件可以扩展电钻的功能,满足不同工作需求。
九、电源部分为了提供电钻所需的电力,电钻通常需要连接电源。
电钻的电源部分通常由插头和电源线组成,插头用于连接电源插座,电源线用于输送电能。
总结:电钻的结构组成主要包括外壳部分、电机部分、换向器部分、齿轮部分、离合器部分、速度控制部分、钻头部分、附件部分和电源部分。
这些部件协同工作,使电钻能够高效、安全地完成钻孔等工作任务。
Z525加工多孔零件的辅助机构设计
Z525加工多孔零件的辅助机构设计目录目录 (1)中文摘要 (2)ABSTRACT (3)第1章绪纶 (4)1.1多孔零件加工应 (4)1.2多孔零件加工的设备 (4)1.3多孔零件加工的趋势 (6)第2章普通钻床改为多孔零件钻床 (7)2.1生产任务 (7)2.2普通立式钻的选型 (7)第3章多孔零件齿轮传动箱的设计 (9)3.1设计前的准备 (9)3. 2传动系统的设计与计算 (10)第4章多孔零件箱的结构设计 (16)4.1箱盖、箱体和中间板结构 (16)4.2多孔零件箱轴的设计...................... .......... .......... (16)第5章导向装置的设计 (33)第6章接杆刀具 (33)总结 (34)参考文献 (38)1中文摘要本设计是关于普通钻床改造为多孔零件钻床的设计。
普通钻床为单轴机床,但安装上多孔零件箱就会成为多孔零件的钻床,改造成多孔零件钻床后,能大大地缩短加工时间,提高生产效率。
因此本设计的重点是多孔零件箱的设计,设计内容包括齿轮分布与选用、轴的设计、多孔零件箱的选用、导向装置设计等。
关键词:多孔零件钻床;生产效率;多孔零件箱2AbstractThe design is about reconstructing the ordinary drill to a multiple drill. The ordinary drill is a single drill. It will improve its productive efficiency, shorten its processing time if assembled a multiple spindle case on. That so calls a multiple drill. Hereby, the keystone of this design paper is how to design a multiple spindle heads. The design subjects include the selection and distribution of gear wheel, the design of spindle, and the guiding equipment and selection of the multiple spindle heads, etc.Key words: multiple drill; productive efficiency; multiple spindle heads3- 4 -第1章 绪论1.1多孔零件加工应用1.1.1 据统计,一般在车间中普通机床的平均切削时间很少超过全部工作时间的15%。
反井钻机结构、特点及工作原理
如图1,RBM —200 型反井钻机主要由钻机车1、泵车2、操作车3 和钻具4(包括钻杆,钻头)以及辅助工具等组成。
1 2 341. 钻机车2. 操作车3. 泵车4. 钻具图 1 RBM—200 型反井钻机1.钻机车钻机车(如图2)是钻机的主机,它由钻架9、动力水龙头7、主液压缸5、上(下) 支撑6 (10)、辅助卸扣装置16 和输送钻杆的机械手13 等组成。
5 67 8 9 10 1213 141115165. 主推力缸6. 上支撑7. 动力水龙头8. 滑轨9. 钻架 10. 下支撑11. 钻机平车 12. 转盘吊 13. 机械手 14. 后拉杆 15. 前拉杆 16. 辅助卸扣装置图 2 钻机车结构图(1)钻架采用两个槽形架作立柱,上下用盖板通过高强螺栓连成框形机架。
架内两侧有导向轨供动力水龙头滑动用,底盘可固定钻杆,还可同扶正套相配。
(2)动力水龙头它是钻机的核心部件,包括液压马达、齿轮箱和轨衬。
动力水龙头机头部位既承受拉力又传递扭矩。
(3)主液压油缸采用双作用主液压油缸。
工作时缸筒运动。
活塞杆不动为避免高压油管时常运动造成磨损,进油口不设在缸筒上,而由活塞杆中心供油。
(4)上、下支撑上支撑由两个液压油缸和加长杆组成,用以顶住巷道顶板。
下支撑根据地面、并在不同使用条件设计了不同结构,前者用固定式下支承板结构,可与基础直接用地脚螺拴连接,并在使用时采用液压油缸支承螺杆承压。
上下支撑分别安装在钻架两侧,上下支撑实际上是两个100mm 的液压千斤顶,它们都是用螺栓和销轴与钻架相接,他们的作用是调平找正钻架、防止钻架松动和克服来自钻头的反扭矩和反作用。
(5)辅助卸扣装置(卡盘)钻机拆卸钻杆靠动力水龙头的反扭矩,为满足拆卸钻杆的需要,本机设计一个辅助卸扣装置。
它是一个油缸,导向滑道和棘爪组成。
该装置的扭矩大于液压马达的扭矩,将钻杆抱死,使用时液压马达和卸扣装置共同起作用。
(6)转盘吊及机械手转盘吊是由液压油缸控制起升和下放的小型起重设备,可在360 度范围内吊运钻杆。
四工位专用钻孔机床设计(全套CAD图纸)
四工位专用钻孔机床设计(全套CAD图纸)全套CAD图纸,联系 695132052 第1章绪论1.1 机床的发展与现状金属切削机床是人类在改造自然的长期生产实践中,不断改进生产工具的基础上产生和发展起来的。
最原始的机床是依靠双手的往复运动,在工件上钻孔。
随着加工对象材料的变化和社会的进步,机床的种类也随着增加,功能也越来越多。
近年来,由于新技术的发展并在机床领域得到应用,使机床的发展更加迅猛。
多样化、精密化、高效化、自动化是这一时代机床发展的基本特征。
也就是说,机床的发展紧密迎合社会生产的多种多样和越来越高的要求。
我国的机床工业是在新中国成立后建立起来的。
50多年来,我国的机床工业获得了高速发展。
目前我国已经形成了布局比较合理、比较完善的机床工业体系。
机床的性能也在逐渐提高,有些机床的性能已经接近世界先进水平。
但与世界水平相比,还是有较大的差距。
因此,要想缩短与先进国家的差距,我们必须开发设计出我国自己的高性能机床。
现代金属切削机床的主要发展趋势是:提高机床的加工效率,提高机床的自动化程度以及进一步提高机床的加工精度和减小表面粗糙度值。
1.2 机床的用途及分类钻床是孔加工用机床,主要用来加工外形较复杂,没有对称回转轴线的工件上的孔。
在钻床上加工时,工件不动,刀具作回转主运动,同时沿轴向移动,完成进给运动。
钻床可完成钻孔、扩孔、铰孔等工作。
钻床可分为:立式钻床、卧式钻床、台式钻床、摇臂钻床,深孔钻床及其它钻床等。
本次设计的四工位专用钻孔机床是卧式钻床,四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作,如图1.1所示。
它的执行机构有两个:一是装有四工位工件的回转工作台,二是装有专用电动机的带动的三把刀具的主轴箱。
主轴箱每向左移动送进一次,在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
当主轴箱右移退回到刀具离开工件后,工作台回转90度,然后主轴箱再次左移。
很明显 ,对某一个工件来图1.1 四工位专用机床执行动作图说,要在四次工作循环后完成装、钻、扩、铰、卸等工序。
钻机组成及各部分的工作原理
钻机组成及各部分的工作原理钻机是一种工程机械设备,主要用于地下工程、石油勘探和矿山开采等领域。
它由多个部分组成,每个部分都有其特定的工作原理和功能。
钻机主要由下面几个部分组成:1.钻杆和钻头:钻杆是连接钻机和钻头的部分,通常由多段管道组成。
钻杆通过旋转传递扭矩和推力给钻头,使其进入地下或岩石中进行钻探。
钻头通常由钢制成,具有特殊的切削工具,可根据需要切削地下岩石。
2.钻机架:钻机架是支撑钻机各个部分的主要结构。
它通常由重型金属构件制成,以提供稳定的平台。
钻机架具有可调节的高度和角度,使钻机能够适应不同的钻探需求。
3.钻机动力系统:钻机通常由内燃机或电动机提供动力。
内燃机通常使用汽油或柴油作为燃料,并通过传动系统将动力传递给钻杆和钻头。
电动机通过电源供电,并通过电动传动系统传递动力给钻杆和钻头。
4.钻机液压系统:液压系统主要用于控制钻机的各个部分,如旋转机构、提升机构和推进机构。
它通过液压泵将液体高压输送到不同的液压缸和马达中,从而实现对钻机各个部分的控制。
5.钻机控制系统:控制系统是钻机的大脑,它接收来自操作员的指令,并将其转换为相应的机械运动。
控制系统通常由电子控制器和传感器组成,用于监测和控制钻机的各个参数,如转速、扭矩和推力。
钻机的工作原理可以简单概括为以下几个步骤:1.安装钻杆和钻头:将钻杆连接到钻机架上,并将钻头安装在钻杆的末端。
然后通过液压系统提供的推力将钻头推入地下或岩石中。
2.旋转钻杆:通过钻机的动力系统将旋转力传递给钻杆,从而使钻头以旋转的方式切削地下岩石。
旋转的方向和速度可以根据需要进行调节。
3.提升钻杆:钻杆通常以一定的角度向下钻探,并且在钻进过程中需要不断提升和再次推进。
通过液压系统提供的推力和吊绳将钻杆提升到适当的高度,然后再次推进。
4.冷却和清理:钻探过程中产生的高温会对钻头和钻杆造成损害,因此需要通过液压系统提供的冷却液对其进行冷却。
同时,冷却液还可以将岩石屑和碎片从钻孔中冲洗出来,以保持钻孔的清洁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程名称:机械原理 设计题目:半自动钻床工作机构设计 院 系:机械系 专 业:机械设计制造技术及其自动化 学 号: 姓 名:
西南交通大学 2015年 11 月 20 日 机械原理设计任务书 学生姓名 班级 学号 设计题目: 半自动钻床工作机构设计 一、设计题目简介 设计加工图1所示工件ф12mm孔的半自动钻床。进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。
图1 加工工件 二、 设计数据与要求
方案号 进料机构 工作行程 mm 定位机构 工作行程 mm 动力头 工作行程 mm 电动机转速 r/mm 工作节拍(生产率) 件/min D 25 20 15 1400 2
三、 设计任务
1.半自动钻床至少包括凸轮机构、齿轮机构在内的三种机构。 2.设计传动系统并确定其传动比分配。 3. 图纸上画出半自动钻床的机构简图和运动循环图。 4.凸轮机构的设计计算。按各凸轮机构的工作要求,自选从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。对盘状凸轮要用电算法计算出理论廓线、实际廓线值。画出从动件运动规律线图及凸轮廓线图。 5. 确定电动机的功率与转速; 6. 用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。 7. 编写设计计算说明书,说明书应包括设计思路、计算及运动模型建立过程以及效果分析等。 8.在实验室应用机构综合实验装置验证设计方案的可行性。 四、设计提示 1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。 2. 除动力头升降机构外,还需要设计送料机构、定位机构。各机构运动循环要求见表4。 3. 可采用凸轮轴的方法分配协调各机构运动。 表4 机构运动循环要求
凸轮轴 转角 10º 20º 30º 45º 60º 75º 90º 105º~270º 300º 360º
送料 快进 休止 快退 休止 定位 休止 快进 休止 快退 休止 进刀 休止 快进 快进 快退 休止
完成日期: 年 月 日 指导教师 五、设计工作原理 5.1机构的工作原理 该系统由电机驱动,通过变速传动将电机的1400r/min降到主轴的2r/min,与传动轴相连的凸轮机构控制送料,定位,和进刀等工艺动作,通过齿轮传动带动齿条上下平稳地运动,这样动力头也就能带动刀具平稳地上下移动从而保证了较高的加工质量,简图如下: 六、功能分解图,执行机构动作 6.1功能分解图如下图
6.2执行构件的选择 1.减速传动功能 选用经济成本相对较低,结构简单,传动比大的特点,可满足具有较大传动比的工作要求,我们这里就采用皮带轮来实现我设计的传动。 方案一(选用) 选用的装置具有经济、结构简单的特点,由于电动机的转速为1400r/min,而选用设计要求的主轴转速为2r/min。,通过变速传动将电机的1400r/min降到主轴的2r/min,使得实现每秒2个工作节拍。
方案二 用定轴轮系减速传动。由于传动比=输入转速1400/输出转速2=700传动比过大,故用二 级减速传动。其中带传动起过载保护作用。此机构虽然可以是实现转速的缓慢下降,但是结构复杂,成本高。
2.送料功能 由于我们设计的机构要有间歇往复的运动,有当凸轮由近休到远休运动过程中,定位杆就阻止了工件滑动,当凸轮由远休到近休运动过程中可通过两侧的弹簧实现定位机构的回位,等待送料,凸轮的循环运动完成了此功能。 方案一(选用) 其较方案一结构简单,但由于缺少杠杆,其完成快进、休止和快退的动作,如果行程较大,为达到压力角要求,要求凸轮基圆半径较大,不利于远距离的运动传递,使制造成本升高,机构笨重。
方案二 采用一个凸轮机构来完成送料机构的往复运动。通过凸轮机构和导杆滑块实现送料时的快进、休止和快退的动作。由于采用了杠杆,故其能够完成送料的较大传动距离。 3.定位功能 方案一(选用) 结构简单,但由于缺少杠杆,无法对工件施加较大的力。而且如果行程较大,为达到压力角要求,要求凸轮基圆半径较大,不利于远距离的运动传递,使制造成本升高,机构笨重。
方案二 通过凸轮机构实现定位夹紧时的休止、快进及夹紧和快退的动作。由于采用了杠杆,夹紧装置可对工件施加较大的夹紧力保证完成定位夹紧的功能。
4.进刀功能 采用凸轮的循环运动,推动滚子使滚子摆动一个角度,在杠杆的另一端焊接一个圆弧齿轮,圆弧齿轮的摆动实现齿轮的转动,齿轮的转动再带动动力头的升降运动实现进刀。 方案一 采用一个直动滚子从动件盘行凸轮机构并结合滑块导杆传递齿轮齿条机构。进刀时,凸轮在推程阶段运行,其通过机构传递带动齿轮齿条啮合,进而带动动力头完成钻孔。导杆垂直移动的距离即为齿轮弧转动的角度,且齿轮齿条传动具有稳定性。
方案二(选用) 采用一个凸轮机构来传递齿轮齿条机构。其比方案一简单,但由于没有杠杆,所以不能传动很大的范围。 七、执行机构设计过程及尺寸计算 1.送料凸轮机构机构采用如下分析 凸轮机构采用直动滚子端面柱体凸轮,且为力封闭凸轮机构,利用弹簧力来使滚子与凸轮保持接触,实现进料功能。只要适当地设计出凸轮的轮廓曲线,就可以使推杆得我们所需要的运动规律,满足加工要求,而且响应快速,机构简单紧凑。具体设计如下: 设计基圆半径r0=40mm, 凸轮转角λ=0°-30°,送料机构快进,推杆行程h=25mm; 凸轮转角λ=30°-45°,送料机构休止,推杆行程h=0mm; 凸轮转角λ=45°-90°, 送料机构快退,推杆行程h=-25mm; 凸轮转角λ=90°-360°, 送料机构休止,推杆行程h=0mm;
2.进刀机构的设计 (1).由进刀规律,我们设计了凸轮摆杆机构,又以齿轮齿条的啮合来实现刀头的上下运动; (2).用凸轮摆杆机构和直齿条所构成的同一构件,凸轮摆杆从动件的摆动就可以实现齿条的上下摆动,从而实现要求;采用滚子盘行凸轮,且为力封闭凸轮机构,利用弹簧力来使滚子与凸轮保持接触.刀具的运动规律就与凸轮摆杆的运动规律一致; (3).弧形齿条所转过的弧长即为刀头所运动的的距离。具体设计步骤如下: 1.根据进刀机构的工作循环规律,设计凸轮: 基圆半径r0=40mm; 凸轮转角λ=0-60°,刀具休止,推杆行程h=0mm; 凸轮转角λ=60°-270°,刀具快进,推杆行程h=15mm; 凸轮转角λ=270°-300°, 刀具快退,推杆行程h=-15mm; 凸轮转角λ=300°-360°刀具休止,推杆行程h=0mm
2.设计齿条齿轮,根据刀头的行程和凸轮的摆角,设计出圆形齿轮的半径r=60mm,模数m=1,齿数z=60,两个齿条的模数m=1,齿数z=25,两个齿条与齿轮啮合。
齿轮材料:齿轮采用45号钢,软齿面,齿轮调制处理。 齿面硬度:为217-255HBW,平均硬度为236HBW; 齿轮强度极限为650MPa,齿轮的屈服极限为360MPa; 齿轮齿面平均硬度差为46HBW,在30-50HBW范围内。 齿条正火处理,齿面硬度为162-217HBW,平均硬度为190HBW。 按GB/T10095-1998,均选择8级精度。 (1)齿面接触疲劳强度计算 因为是软齿面闭式传动,故按齿面接触疲劳强度设计齿轮传动:
2
d1t31)][(12dHEH
ZZZTK
uu
齿轮传递的转矩:mm19601055.9n55.91010105661NPT 设计时,因v值未知,K不能确定,初取4.1tK; 由《机械设计》中表10-7取齿宽系数1.1d; 表10-5查得弹性系数 a8.189MPZE; 图10-20选取区域系数5.2ZH; 式10-9计算接触疲劳强度用重合度系数Z 齿条251Z,齿轮602Z
30]1225cos25[arccos2cos[arccos20h*a111aZZ
25]1260cos60[arccos2cos[arccos20h*a222aZZ
2tan-tantan-tan2a21a1,,ZZ
83.12tan-tan60tan-30tan25202520
85.0383.1434Z
(2)计算接触疲劳许用应力H 由图10-25d得接触疲劳极限应力错误!未找到引用源。 取安全系数S=1, a54016009.0][1lim11MPSHHNHK
,
a522155095.0][2lim22MPSHHNHK
取a5222MPHH;
初算齿轮的分度圆直径错误!未找到引用源。,得 2d1t31)][(12dHEH
ZZZTK
uu
32552285.08.1895.22560125601.114.1210
=59.86mm<60mm
所以齿面接触疲劳强度满足要求。
(3)齿根弯曲疲劳强度校核 zmYYYKdsaFFFT213a2
选KF=1.55 mm1105NT 1.1d m=1 60z1 由《机械设计》中式10-5计算弯曲疲劳强度用重合度系数Y 66.083.175.025.075.025.0Y
由《机械设计》中图10-17查得齿形系数63.21aYF,13.22aYF 由《机械设计》中图10-18查得应力修正系数 58.11saY, 65.12saY 由《机械设计》中图10-24c查得弯曲疲劳极限,齿轮a2201limMPF,齿条a1702limMPF 由《机械设计》中图10-22查得得弯曲疲劳寿命系数:.11KFN,12KFN 取弯曲疲劳安全系数 S=1.25 (1%失效概率)