RT100X60-20Q-NC数控轧辊车床使用说明书(电气)
磨床、车床操作规程

数控轧辊车床操作规程1、遵守公司各项规章制度,上班前穿戴好劳保用品2、机床开机启动,等待20秒进入主画面后才可以操作操作面板上其他按钮3、每次断电重新开机前必须得回到参考点4、轧辊加工前一定要首先检查供油系统和机床,确保正常运行5、装夹送辊必须小心谨慎,指挥行车用正确手势,轧辊装上后反复校正,使同心度不大于0.02mm6、对刀要精准,以车刀刚好接触轧辊为准,避免多次对刀产生误差7、操作机床时仔细检查输入的数据,对输入的新程序一定要反复模拟,确认没有问题才能用于加工8、当使用刀具补偿功能时需仔细检查补偿方向和补偿量9、程序运行中不要随便按操作面板上的按钮,以免发生意外10、程序运行中若打刀或有异常,应先按循环停止按钮,出现紧急情况马上按急停按钮11、在车削过程中,必须用样板对每一个孔型槽进行比对,合理调节程序数据,从而达到每个孔型槽符合要求12、每车好一对轧辊及时做好记录,填写好轧辊卡片轧辊车床操作规程1、遵守公司各项规章制度,上班前穿戴好劳保用品2、操作时经常检查油位是否符合要求,凡是手压油泵和采用油枪注油的部位检查各润滑管路是否畅通,各润滑点是否有油3、注意观察中心架各铜瓦与轧辊是否接触,松紧是否合格4、主轴的变速必须在主轴停止转动后进行5、刀架在纵横方向运作时需将所需进给量变换好6、经常检查电机温度、床头箱、溜板箱及进给箱的声音,若有异常,及时通知维修人员修理7、在主轴运转过程中,若发现绿色信号灯熄灭而且红色信号灯亮了,则表示润滑系统发生故障,应该立即停车检查8、运行中严禁触摸任何旋转移动的机架及电器按钮,以免发生事故,进刀时应平缓缓慢,确保安全9、车好没对轧辊,及时做好记录,认真填写轧辊卡片磨床操作规程1、遵守公司各项规章制度,上班前穿戴好劳保用品,机床开动前必须按照“技术安全须知”做好各项准备工作2、开动机床前按“机床润滑图表”检查各处规定的润滑油3、检查各手轮、手柄、旋钮,确保他们均在停止或后退位置,然后闭合电源开关,接通电源,将电气选择按钮置于“手动”位置4、按油泵启动按钮,使油泵运转5、旋转工作台左端放气阀按钮,排除工作台油压筒内空气后再关紧6、拧紧手动进给转换提手,转动横向进给手轮将砂轮架退出使砂轮于待加工的距离大于快速进给量(50mm),转动砂轮架快速进退手柄,使砂轮架快速引进退出几次7、根据实际辊环加工工序,选择磨削方式,纵磨、切入磨纵磨(1)将选择旋钮置于“纵磨”位置,然后将头架紧固在适当位置上,装上工作,反复校正辊环同心度和平行度(不大于0.015mm)顺时针转动工作台液压传动开停手柄,使辊环反复移动,调整“挡铁”得到合力的工作空间,转动工作台适度调节旋钮至所需速度,选择周期进给方式(双进、左进、右进)拨动计时器,选择纵磨无火花磨削次数(2)头架主轴转动,冷却泵开,逆时针旋转砂轮架快速进退手柄,并按预选方式进给,每次进给量不超过0.02mm,当达到预选方式进给量,退出砂轮架,头架主轴停冷却泵开关,测量轧辊直径,如有误差,调整以上步骤,以达到实际尺寸为止.切入磨(1)选择切入磨/纵横选择开关置于“切入磨”位置(2)校正辊环,使辊环同心度和平行度不超过0.015mm(3)逆时针转动砂轮架快速移动手柄,使砂轮快速,同时头架及冷却泵自动开,砂轮开始切入进给.逆时针旋转砂轮架横进给手轮,每次磨削量不大于0.015m,根据数量表显示确定所进给深度,当磨至所需尺寸时,退出砂轮架,用样板和手电筒反复测量孔型,如有误差,调整以上步骤,以达到孔型与样板一致磨床技术安全须知①机床电气设备必须接地良好②非专业人员不得擅自打开电箱,否则可能造成人身伤害.维修机床应处于断电状态,打开电源箱首先检查机床电源是否已被切断,若必须带电维修,应采取相应安全防护措施。
数控车床说明书
1概述1.1 本说明书的适用范围与目的本说明书是为指导用户正确使用我公司生产的平床身数控车床而编写的,请用户认真阅读。
在本说明书的第2部分,提供了操作机床的安全须知,操作者可以把它作为日常工作的检查条目。
在本说明书的第3部分“吊运与安装”中提供了安装本机床的方法和应注意的事项。
在本说明书的第4部分“技术参数”和第5部分“机床结构”中介绍了操作本机床预先应该理解的内容。
第6部分“机床的使用和安全防护”介绍了机床操作中安全方面的防护情况。
第7部分“检查与维修”中为操作者提供了操作和维修本机床所需要的知识和方法。
第8部分“易损件”中提供了机床的易损件的简图。
如果出现本说明书未能涵盖的情况,请与我公司售后服务部门或技术部门联系。
1.2 产品的主要用途本机床主要用于加工各种轴类、盘类零件,可以车削各种螺纹、圆弧、圆锥及回转体的内外曲面,能够满足黑色金属及有色金属材料高速切削的速度需求。
适合于水暖器材、阀门、电器、仪表、汽车、摩托车、轴承等行业零件的加工。
具有高速、高效、高可靠性,加工零件一致性好、受人为因素影响小等的优点。
加工精度可达到IT 6~IT 7级。
1.3 机床的精度本机床的精度符合JB/T8324.1-1996《简式数控卧式车床精度》的标准的要求。
1.4 机床的使用环境本机床适合在下述规定的环境和条件下运行:■环境空气温度:5℃~40℃范围内。
■湿度:最高温度40℃下,相对湿度不得超过50%的的范围内,且温度变化的原则是不能引起冷凝。
■海拔高度:1000米以下。
■大气污染:没有过分的粉尘、酸气等腐蚀性气体和盐分。
■辐射:避免阳光直射或其他热辐射引起环境温度的变化。
■安装位置应远离振动源和易燃易爆物品,远离电磁干扰区。
1.5 机床对环境的影响本机床空运转时噪声声压级不大于83dB,无有害气体或液体排放,因此对环境无不良影响。
2 安全防护须知本机床带有一些必要的安全设备和警示标牌,请操作者在开机前仔细阅读说明书,完全了解机床使用方法,清楚警示标牌含义后再上机操作,以防止出现操作人员伤害或设备损伤的事故。
机床电气手册.doc

机床电气手册2007-1-15目录1、机床电气操作说明2、机床电气元件目录3、机床电气原理图及控制柜布局图4、软件程序机床电气操作说明1、机床概述______(型号)枪钻主要采用有独立PLC功能的时光伺服控制器作为进给系统。
利用伺服控制器的简易PLC功能以及通讯功能研发的一款以触摸屏为上位机,伺服驱动器为伺服单元的新型专用机床。
2、操作说明欢迎画面点击进入点击输入参数参数说明:快进速率:自动时快速到工进位以及返回零点的速率。
工进速率:自动时的工进速率。
手动速率:手动操作时的速率。
快进行程:自动时的工进起始位位置。
总行程:自动时的工进到位位置。
参数说明:前软限位:前软限位到原点的距离。
后软限位:后软限位到原点的距离。
启动延时:自动时启动信号的确认时间。
进给到位延时:自动时工进到位后的延时。
浮漂检测去抖:浮漂信号的确认时间。
限位设置示意图后软限位前软限位原点数值输入窗口清除返回删除确认操作界面点击选择手动/自动自动状态下:触摸屏:闪烁,对刀操作与手动界面无效。
按钮站:按住启动按钮,等确认时间后,机床执行自动动作,在动作中可按暂停按钮暂停动作。
手动状态下:闪烁,可以进行对刀操作,可以进入手动界面。
复位与参数设置按钮任何情况下都有效。
手动界面手动界面的操作规程:进给的允许条件:导套进冷却启动主轴启动进导套退的允许条件:主轴关闭冷却关闭导套退滤纸与退按钮无操作限制。
机床电气元件目录软件程序1、伺服控制器程序;************************************************* ; Copyright (c) 2006,时光科技有限公司技术支持部; All rights reserved.;; 文件名称:枪钻机床控制.S; 文件标识:IMS-GCT40P7S; 摘要:; 当前版本:1.0; 作者:杨征; 完成日期:2006年1月5日;************************************************* ;备注:;***********输入口**************;A0D0- 自动手动切换(1-手动;0-自动);A0D1- 手动进;A0D2- 手动退;A0D3- 手动导套进;A0D4- 手动导套退;A0D5- 手动主轴;A0D6- 手动冷却;A0D7- 手动滤纸;A0D8- 手动调整切换(0-手动;1-调整);A0D9- 复位;C4D0- 主轴检测;C4D1- 冷却电机检测;C4D2- 导套到位检测;C4D3- 导套原位检测;C4D4- 浮漂检测;C4D5- 压力检测;C5D0- 启动;C5D1- 前限位;C5D2- 后限位;C5D3- 原位;C5D7- 暂停;***********输出口************;ALM-报警口(0-伺服正常;1-伺服异常);C0D0-主轴启动指示;C0D1-冷却启动指示;C0D2-运行指示;C0D3-滤纸堵塞指示;C0D4-滤纸启动指示;C0D7-磁分离器;C1D0-主轴;C1D1-冷却泵;C1D2-导套进;C1D3-导套退;C1D4-滤纸;***********用户参数*************;NO.00($FE50)- 快移速率(mm/min);NO.01($FE52)- 工进速率(mm/min);NO.02($FE54)- 快移行程(0.01mm);NO.03($FE56)- 总行程(0.01mm);NO.04($FE58)- 手动速率(mm/min);NO.05($FE5A)- 前软限位(0.01mm);NO.06($FE5C)- 后软限位(0.01mm);NO.07($FE5E)- 进给到位延时(0.1sec);NO.08($FE60)- 启动按钮延时(0.1sec);NO.09($FE62)- 去抖延时(0.1sec);NO.10($FE64)- PSG;*****************程序*******************CALL $460PLSI=0A0=0A9=0 ;回零标志字POKE $FF04 0POKE $F01C 40ONTIM2 X00K00 JNE F00 A0 AND 512JEQ Z00 A0 AND 1JNE S00 A0 AND 1JMP K00;****************手动*****************S00 JSR H00JSR C00S02 JNE F00 A0 AND 512 ;复位?JEQ Z00 A0 AND 1 ;自动?JNE T00 A0 AND 256 ;进入调整状态?DPEEK A2 $FE58 ;读取手动速度并计算A2=A2*2/3S07 A1=A0 AND 6JEQ S10 A1-2JEQ S30 A1-4JMP S90S10 JNE S90 C5 AND 2 ;碰到前限位?JEQ S90 A7-1 ;碰到前软限位?S25 JSR D00 ;电机上电C0=C0 OR 4HZP=-A2JMP S02S30 JNE S90 C5 AND 4 ;碰到后限位?JEQ S90 A8-1 ;碰到后软限位?S45 JSR D00 ;电机上电C0=C0 OR 4HZP=A2JMP S02S90 JSR C00JMP S02;*****************调整*******************T00 JSR H00JSR C00T05 JEQ S00 A0 AND 256JEQ Z00 A0 AND 1 ;自动?DPEEK A2 $FE58 ;读取手动速度并计算A2=A2*2/3A1=A0 AND 6 ;手动进给JEQ T20 A1JEQ T10 A1-2JEQ T15 A1-4JEQ T20 A1-6T10 JNE S90 C5 AND 2 ;碰到前限位?JEQ S90 A7-1 ;碰到前软限位?JEQ T30 C4 AND 1JEQ T30 C4 AND 2JEQ T30 C4 AND 4JEQ T30 C4 AND 32JSR D00C0=C0 OR 4HZP=-A2JMP T30T15 JNE S90 C5 AND 4 ;碰到后限位?JEQ S90 A8-1 ;碰到后软限位?JSR D00C0=C0 OR 4HZP=A2JMP T30T20 JSR C00C0=C0 AND 251T30 JNE T35 A0 AND 32 ;手动主轴C1=C1 AND 254JNE T40 C4 AND 1C0=C0 AND 254JMP T40T35 JEQ T40 C4 AND 2JEQ T40 C4 AND 32C1=C1 OR 1JEQ T40 C4 AND 1C0=C0 OR 1T40 JNE T45 A0 AND 64 ;手动冷却C1=C1 AND 253JNE T50 C4 AND 2C0=C0 AND 253C0=C0 AND 127JMP T50T45 JEQ T50 C4 AND 4C1=C1 OR 2JEQ T50 C4 AND 2C0=C0 OR 2C0=C0 OR 128T50 JNE T55 A0 AND 128 ;手动滤纸C1=C1 AND 239C0=C0 AND 239JMP T60T55 C1=C1 OR 16C0=C0 OR 16T60 A1=A0 AND 24 ;手动导套JEQ T05 A1JEQ T70 A1-8JEQ T80 A1-16JEQ T05 A1-24T70 C1=C1 AND 247C1=C1 OR 4JMP T05T80 JNE T05 C4 AND 1JNE T05 C4 AND 2C1=C1 AND 251C1=C1 OR 8JMP T05;*****************自动*******************Z00 JEQ K00 A9JNE Z05 C5 AND 1JMP K00Z05 DPEEK A6 $FE60A6=A6*43TIC1=A6Z10 JEQ K00 C5 AND 1JNE Z10 TIC1JNE S00 A0 AND 1 ;手动?JNE F00 A0 AND 512 ;复位?JNE M00 C5 AND 128 ;暂停?JNE S90 C5 AND 2 ;碰到前限位?JEQ S90 A7-1 ;碰到前软限位?Z20 JSR D00JSR J00Z25 DPEEK B0 $FE50DPEEK B1 $FE52DPEEK B2 $FE54DPEEK B3 $FE56B0=B0*2/3B1=B1*2/3AA=B2*20AC=B3*20AA=2000-AAAC=-ACPOS=ACA3=0MAXHZ=B0DPOKE $F0DC B0JNE S00 A0 AND 1 ;手动?JNE F00 A0 AND 512 ;复位?JNE M00 C5 AND 128 ;暂停?JNE S90 C5 AND 2 ;碰到前限位?JEQ S90 A7-1 ;碰到前软限位?JEQ Z80 C4 AND 1JEQ Z80 C4 AND 2JEQ Z80 C4 AND 4JEQ Z80 C4 AND 32JSR D00JSR J00C0=C0 OR 4DPEEK PSG $FE64Z30 JMI Z40 PLS-AAJNE S00 A0 AND 1 ;手动?JNE F00 A0 AND 512 ;复位?JNE M00 C5 AND 128 ;暂停?JNE S90 C5 AND 2 ;碰到前限位?JEQ S90 A7-1 ;碰到前软限位?JEQ Z80 C4 AND 1JEQ Z80 C4 AND 2JEQ Z80 C4 AND 4JEQ Z80 C4 AND 32JNE Z30 PSGZ40 MAXHZ=B1DPOKE $F0DC B1Z50 JNE S00 A0 AND 1 ;手动?JNE F00 A0 AND 512 ;复位?JNE M00 C5 AND 128 ;暂停?JNE S90 C5 AND 2 ;碰到前限位?JEQ S90 A7-1 ;碰到前软限位?JEQ Z80 C4 AND 1JEQ Z80 C4 AND 2JEQ Z80 C4 AND 4JEQ Z80 C4 AND 32JNE Z50 PSGC0=C0 AND 251DPEEK A6 $FE5EA6=A6*43TIC1=A6Z60 JNE Z60 TIC1JSR H00Z65 POS=0A3=1MAXHZ=B0DPOKE $F0DC B0JNE S00 A0 AND 1 ;手动?JNE F00 A0 AND 512 ;复位?JNE M00 C5 AND 128 ;暂停?JNE S90 C5 AND 4 ;碰到后限位?JEQ S90 A8-1 ;碰到后软限位?C0=C0 OR 4DPEEK PSG $FE64Z70 JNE S00 A0 AND 1 ;手动?JNE F00 A0 AND 512 ;复位?JNE M00 C5 AND 128 ;暂停?JNE S90 C5 AND 4 ;碰到后限位?JEQ S90 A8-1 ;碰到后软限位?JNE Z70 PSGC1=C1 AND 251C1=C1 OR 8JSR C00JMP K00Z80 JSR C00JMP Z25;*****************暂停*******************M00 PSG=0HZP=0JNE M00 HZSC0=C0 AND 251JEQ M00 C5 AND 1JEQ Z25 A3JEQ Z65 A3-1JMP M00;*****************复位*******************F00 JNE F60 A9JSR C00DPEEK B0 $FE50B0=B0*2/3JSR D00JSR H00C0=C0 OR 4HZP=B0F10 JNE F20 C5 AND 4JEQ F10 C5 AND 8JMP F30F20 HZP=-B0F25 JEQ F25 C5 AND 8F30 HZP=-100F40 JNE F40 C5 AND 8POKE $FF00 1F50 PEEK B9 $FF00JNE F50 B9F60 HZP=0PSG=0JNE F60 HZSF65 JSR D00JSR H00POS=0DPEEK B0 $FE50MAXHZ=B0DPEEK PSG $FE64F70 JNE F70 PSGA9=1C1=C1 AND 251C1=C1 OR 8JSR C00JMP K00;*************主轴开启过程**************J00 A1=C4 AND 7JNE J10 A1-7 ;没完成开启过程?RTSJ10 C1=C1 AND 247 ;导套退取消C1=C1 OR 4 ;导套进J20 JEQ J20 C4 AND 4 ;导套到位?TIC1=820J25 JNE J25 TIC1C1=C1 OR 2 ;开启冷却电机J30 JEQ J30 C4 AND 2 ;冷却电机启动?J40 JEQ J40 C4 AND 32 ;压力够?C0=C0 OR 128 ;打开磁分离器C0=C0 OR 2C1=C1 OR 1 ;开启主轴J50 JEQ J50 C4 AND 1 ;主轴开启?C0=C0 OR 1RTS;*************主轴关闭过程**************H00 C1=C1 AND 254 ;关闭主轴H20 JNE H20 C4 AND 1 ;主轴关闭?C0=C0 AND 254C1=C1 AND 253 ;关闭冷却电机H30 JNE H30 C4 AND 2 ;冷却电机关闭?C0=C0 AND 127 ;关闭磁分离器C0=C0 AND 253RTS;************电机上电*************D00 JEQ D10 SEVCCRTSD10 SEVCC=1TIC1=40D15 JNE D15 TIC1RTS;************电机下电*************C00 JNE C10 SEVCCRTSC10 HZP=0PSG=0JNE C10 HZSSEVCC=0C0=C0 AND 251TIC1=40C15 JNE C15 TIC1RTS;**************中断***************;***导套退的取消判定***X00 JNE X50 C1 AND 8A4=430JMP X60X50 A4=A4-1JMI X55 A4JMP X60X55 C1=C1 AND 247;***浮漂的判定***X60 JNE X07 A0 AND 256JNE X02 C4 AND 16DPEEK A5 $FE62C1=C1 AND 239C0=C0 AND 247JMP X07X02 A5=A5-1JMI X05 A5JMP X07X05 C1=C1 OR 16C0=C0 OR 8;***限位判定***X07 AF=ABS HZP*3/2JEQ X08 AFB6=AF+1JMP X09X08 B6=AFX09 DPEEK B4 $FE5ADPEEK B5 $FE5CBA=PLSBC=ABS BA/20BE=-BA/20JPL X10 BABD=-BDJMP X30X10 B7=BD-B5JPL X20 B7A8=0RTSX20 A8=1RTSX30 B8=BD+B4JMI X40 B8A7=0RTSX40 A7=1RTSEND2、触摸屏程序INITIAL宏:#COM2,9600,NONE,8,1 @600 = C23HSYS(INIT_COM, 600) #发送4字节参数@0 = 16@2 = 30H@3 = 44H@4 = 42H@5 = 46H@6 = 45H@17 = 0DH#发送2字节参数@20 = 12@22 = 30H@23 = 44H@24 = 46H@25 = 46H@26 = 45H@33 = 0DH#发送操作指令@40 = 8@42 = 30H@43 = 41H@44 = 30H@49 = 0DH#读取C0状态@60 = 4@62 = 30H@63 = 43H@64 = 30H@65 = 0DH#读取HZP@70 = 4@72 = 30H@73 = 42H@74 = 36H@75 = 0DH#读取位置@80 = 4@82 = 30H@83 = 42H@84 = 46H@85 = 0DH#读取4字节参数@400 = 8@402 = 30H@403 = 44H@404 = 41H@405 = 46H@406 = 45H@409 = 0DH#读取2字节参数@410 = 8@412 = 30H@413 = 44H@414 = 45H@415 = 46H@416 = 45H@419 = 0DH #Timer@300 = 1@302 = 1@304 = 0#Buffer1@100 = 5@102 = 30H@106 = 30H#Buffer2@110 = 9@112 = 30H@119 = 30H@120 = 30H#Buffer3@130 = 5@132 = 30H@136 = 30H#Buffer4@140 = 5@142 = 30H@146 = 30H#Buffer5@150 = 5@152 = 30H@156 = 30H#Initial@200 = 30H@201 = 30H@202 = 30H@203 = 30H@204 = 30H@205 = 30H@206 = 30H@207 = 30H@208 = 30H@209 = 30H@500 = 30H@501 = 30H@502 = 30H@503 = 30H#Symbol@350 = 0@351 = 0END操作界面CYCLIC宏:#发送操作指令@45 = H2A(@500)SYS(PUT_CHARS, 40)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 100)#读取C0状态LABEL 1SYS(PUT_CHARS, 60)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 130)@501 = A2H(@132)IF @136 != 0DH THEN GOTO LABEL1@136 = 30H#读取HZPLABEL 2SYS(PUT_CHARS, 70)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 140)@502 = A2H(@142)IF @146 != 0DH THEN GOTO LABEL2@146 = 30H#读取位置LABEL 3SYS(PUT_CHARS, 80)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 150)@503 = A2H(@152)IF @156 != 0DH THEN GOTO LABEL3@156 = 30HEND手动界面CYCLIC宏:#发送操作指令@45 = H2A(@500)SYS(PUT_CHARS, 40)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 100)#读取C0状态LABEL 1SYS(PUT_CHARS, 60)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 130)@501 = A2H(@132)IF @136 != 0DH THEN GOTO LABEL1@136 = 30H#读取HZPLABEL 2SYS(PUT_CHARS, 70)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 140)@502 = A2H(@142)IF @146 != 0DH THEN GOTO LABEL2@146 = 30H#读取位置LABEL 3SYS(PUT_CHARS, 80)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 150)@503 = A2H(@152)IF @156 != 0DH THEN GOTO LABEL3@156 = 30HEND参数设置界面1 CYCLIC宏:IF @350 == 1 THEN GOTO LABEL 1 #Receive #$FE50 $FE52LABEL 2@120 = 30H@407 = 35H@408 = 30HSYS(PUT_CHARS, 400)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 110)IF @120 != 0DH THEN GOTO LABEL 2@200 = A2H(@112)@201 = A2H(@116)#Receive #$FE54 $FE56LABEL 3@120 = 30H@407 = 35H@408 = 34HSYS(PUT_CHARS, 400)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 110)IF @120 != 0DH THEN GOTO LABEL 3@202 = A2H(@112)@203 = A2H(@116)#Receive #$FE58LABEL 4@106 = 30H@417 = 35H@418 = 38HSYS(PUT_CHARS, 410)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 100)IF @106 != 0DH THEN GOTO LABEL 4@204 = A2H(@102)@350 = 1LABEL 1#Set $FE50 $FE52@7 = 35H@8 = 30H@9 = H2A(@200)@13 = H2A(@201)SYS(PUT_CHARS, 0)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)#Set $FE54 $FE56@7 = 35H@8 = 34H@9 = H2A(@202)@13 = H2A(@203)SYS(PUT_CHARS, 0)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)#Set $FE58@27 = 35H@28 = 38H@29 = H2A(@204)SYS(PUT_CHARS, 20)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)END 参数设置界面2 CYCLIC宏:IF @351 == 1 THEN GOTO LABEL 1 #Receive #$FE5A $FE5CLABEL 2@120 = 30H@407 = 35H@408 = 41HSYS(PUT_CHARS, 400)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 110)IF @120 != 0DH THEN GOTO LABEL 2@205 = A2H(@112)@206 = A2H(@116)#Receive #$FE5E $FE60LABEL 3@120 = 30H@407 = 35H@408 = 45HSYS(PUT_CHARS, 400)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 110)IF @120 != 0DH THEN GOTO LABEL 3@207 = A2H(@112)@208 = A2H(@116)#Receive #$FE62LABEL 4@106 = 30H@417 = 36H@418 = 32HSYS(PUT_CHARS, 410)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)SYS(GET_CHARS, 100)IF @106 != 0DH THEN GOTO LABEL 4@209 = A2H(@102)@351 = 1LABEL 1#Set $FE5A $FE5C@7 = 35H@8 = 41H@9 = H2A(@205)@13 = H2A(@206)SYS(PUT_CHARS, 0)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)#Set $FE5E $FE60@7 = 35H@8 = 45H@9 = H2A(@207)@13 = H2A(@208)SYS(PUT_CHARS, 0)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)#Set $FE62@27 = 36H@28 = 32H@29 = H2A(@209)SYS(PUT_CHARS, 20)SYS(SET_TIMER, 300)SYS(WAIT_TIMER, 300)END。
教材数控车床操作介绍
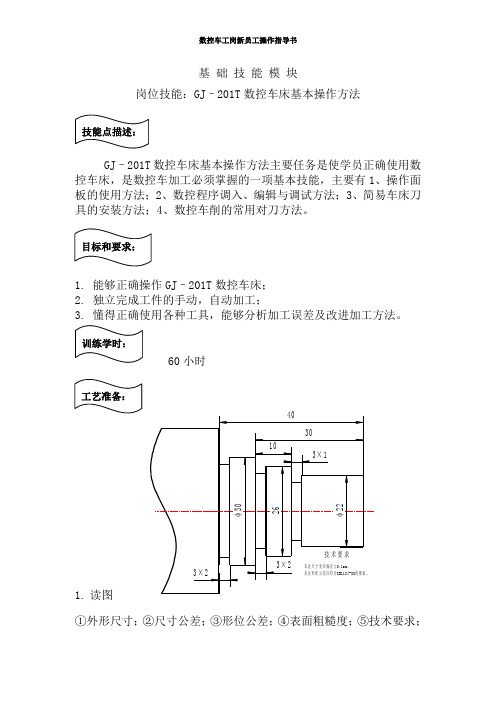
基 础 技 能 模 块岗位技能:GJ –201T 数控车床基本操作方法数控车床基本操作方法主要任务是使学员正确使用数控车床,是数控车加工必须掌握的一项基本技能,主要有1、操作面板的使用方法;2、数控程序调入、编辑与调试方法;3、简易车床刀4、数控车削的常用对刀方法。
GJ –201T 数控车床;2. 独立完成工件的手动,自动加工;60小时1. 读图 ①外形尺寸;②尺寸公差;③形位公差;④表面粗糙度;⑤技术要求;2. 刀具:外圆车刀、切槽刀3. 夹具:三爪卡盘4. 量具:游标卡尺、外径千分尺、1 GJ_201T 数控车系统操作面板的功能GJ_201T 的操作面板如图所示,由液晶显示屏,功能键,编程与控制键盘及功能按钮与旋钮组成。
图3.1:GJ_201M 的操作面板布局● 功能键 控制机床的操作或显示;● 编程与控制键盘 一般键盘功能;●循环启动/指示灯按下此按钮,会根据操作方式完成相应的操作。
当操作进行中时,绿色指示灯亮;●进给保持/指示灯当处于自动加工方式时,按下此按钮,系统进入进给保持状态,再次按下此按钮,系统退出保持状态。
当进入保持状态时,红色指示灯亮;●方式选择旋钮共有8个档位,从左至右依次为:MDI,自动连续(AUTO),自动单步(STEP),连续手动(MANU),增量手动/手轮(MANJ),点退(PROF),回零(HOME),复位(RESET);●进给倍率旋钮共有11个档位,倍率从0%~125%;●主轴倍率旋钮共有11个档位,倍率从75%~125%;2.数控机床开机与关机操作步骤2.1 开机步骤(1)将机床侧面的旋钮旋至ON位置。
(2)按下机床面板上方型的绿色按钮(3)系统启动后再打开急停按钮注意事项:1) 开机之前,确认机床是正常的。
2) 开机的同时,请不要动操作面板上的按键或旋钮,以避免引起意外。
在系统的位置显示画面出现之后,再开始进行操作。
3) 上电之后,在开始操作之前,观察显示屏上部的状态信息,确认当前的操作方式是否与要进行的操作相符。
数控铣床操作说明书
. .*K712小型数控立式铣床操作说明书※**航海高等专科学校轮机系机械教研室※2006年5月制一铣床操作流程1 开机前必须认真阅读"机床的使用说明书”、"数控系统编程与操作”使用说明书和"变频器使用”。
掌握机床的各个操作键的功能和熟悉机床的机械传动原理及润滑系统。
2 机床上电与关机顺序机床上电先把机床左电器柜侧面的断路开关向上合闸,然后按下小幅面板(见下图)的"电源ON”按钮,系统进入操作界面显示55#急停报警,将"急停按钮”顺时针旋开解除急停状态;机床关机先按下"急停按钮” 按钮,再按"电源OFF ”断开系统电源,最后打下断路开关断开机床电源。
损。
检查无误后,启动机床操作各控制按钮检查机床运转是否正常。
检查*、Y 、Z 轴的三个运动方向是否正确无误。
4 主轴旋转方向是否正确 主轴的转速*围是根据机床使用说明书的主要参数对交流变频器内部参数在机床出厂前已设定好。
用户不得随意擅自改变主轴的转速*围,因为主轴的转速*围是由主轴自身结构所决定。
5主轴本体上端的外六角是用来配合装卸刀具用的。
装卸完刀具后必须将杯罩盖上才能启动主轴,以防止主轴转动带动其它物件伤及到人体。
…流程图如下…急停按钮 电源OFF 循环停止 手摇轮警报指示灯循环启动 电源ON二机床基本操作1. 对工作原点:用碰数棒或用铣刀试铣法:以所加工工件中心为编程原点来说明找正工作原点:1)找Z向零点,在手动操作方式下,启动主轴沿着Z-向用铣刀刚好铣削到工件为止,按偏置-Z-ENTER。
2)找*向零点,铣刀沿着*-向偏离工件,把铣刀移动到Z-2处,沿着*+靠近工件即将铣刀改用点动方式刚好铣削到工件为止,按偏置-*-ENTER.,把铣刀移动到工件另一侧,沿着*+靠近工件即将铣刀改用点动方式刚好铣削到工件为止,读取*向的坐标值a,按G92*a/2—ENTER。
*向零点找正完毕。
数控车床操作规程

数控车床操作规程1。
开机前要检查润滑油是否充裕、冷却是否充足,发现不足应及时补充。
2.检查机床导轨以及各主要滑动面,如有障碍物、工具、铁屑、杂物等,必须清理、擦拭干净、上油。
3。
打开数控车床电器柜上的电器总开关。
4.启动数控机床.5。
手动返回数控车床参考点。
首先返回+X方向,然后返回+Z方向。
6。
车刀安装不宜伸出过长,车刀垫片要平整,宽度要与车刀底面宽度一致.7。
对刀操作时应选取合适的主轴转速、背吃刀量及进给速度。
8.在自动运行程序前,必须认真检查程序,确保程序的正确性。
在操作过程中必须集中注意力,谨慎操作,运行前关闭防护门。
运行过程中,一旦发生问题,及时按下复位按钮或紧急停止按钮。
9.出现报警时,要先进入主菜单的诊断界面,根据报警号和提示文本,查找原因,及时排除警报。
10.加工完毕后,应把刀架停放在远离工件的换刀位置。
11.实习学生在操作时,旁观的同学禁止按控制面板的任何按钮、旋钮,以免发生意外及事故。
12.严禁任意修改、删除机床参数.13。
关机前,刀架应移动到距离主轴较远处,清除铁屑,清扫工作现场,认真擦净机床,导轨面处加油保养,将进给速度修调置零.14。
关闭电器总开关。
2.1数控车床操作规程2.1.1工作前a.查验“交接班记录"。
b.检查操纵手柄、开关、旋钮是否在正确的位置,操纵是否灵活,安全装置是否齐全、可靠。
c.接通电源前,应注意电源电压,超出规定电压范围不允许合上开关。
空车低速运转2?/FONT>3分钟,观察运转状况是否正常,如有异常应停机检查.d.观察油标指示,检查油量是否合适,油路是否畅通,在规定部位加足润滑油、冷却液.e.确认润滑、电气、机械各部位运转正常后方可开始工作.2.1.2工作中a.严禁超性能使用.b.禁止在机床的导轨表面、油漆表面放置物品.c.严禁在导轨面上敲打、校直和修整工件.d.对新的工件在输入加工程序后,必须先用“试运行键”检查程序编制的正确性,再用“单程序段操作键”检查程序运行情况,此时手指放在停止按钮上,随时准备做停止操作。
FANUC电气说明书
使用说明书(电气部分)出厂编号中华人民共和国大连机床集团有限责任公司序首先感谢您使用本公司的产品,我们深信您所购买的产品具有坚实与高精度的品质,配合适当的维护,在未来的时间里,将带给您更优越的加工产品品质。
由于本公司持续不断地提高产品性能,同时您也可能有特殊要求,因此您可能会发现送达贵公司的机床与本文件有些差异,此仅表示新的改善方案已运用到您的机床上。
如有任何问题,请随时与本公司联系。
说明书中的所有附图与画面,均只是用于图解说明,有助于用户了解。
说明书中并不提供所有构件的实际尺寸或公差值。
如本公司对本产品、机床规格及各种机床文件进行修改或完善,恕不另行通知,请以机床实际情况为准。
本机床所有随机文件在未得到本公司书面同意前,不得以任何形式或方法来重新制作、翻印或影印。
本公司保留上述有关权利。
目录1、电气安全2、机床电气概述3、机床操作概述4、机床编程概述5、机床电气维修概述附件A:电气原理及接线图(0i-MC+αi电机)附件B:电气原理及接线图(0i/ 0i mate-MC+βi电机)备注:本说明书适用于XD系列:30/40VDL/F系列:500/600/600A/800/1000/1000A/1200/1300/1400/1400A/1500/18001. 电气安全1.1 安全预防本机床安装有许多安全设置,以避免遭受伤害或破坏,操作者不能仅依赖于本机床的这些保护装置,而应该了解以下各章节说明后,方可进行操作和维修。
切不可随意操作、维修机床。
否则将大大增加个人伤害、机床损伤的可能性。
经过对本手册的阅读以及结合您对机床操作的常识及经验,将会降低非加工时间、提升生产效率及提高操作机床的安全性。
因在特殊运用的场合而附加的安全因素必须加以考虑,请参考相关的安全作业规章制度。
重要守则★未经培训的人员禁止维护或操作本机床;★禁止操作工尝试维修本机床;★请谨慎工作并随时注意安全。
如您身体已受药物或酒精的影响,请勿操作或维修本机床;★请勿使用压缩空气直接对着控制面板、电气箱喷吹;★必须知道“紧急停止按钮”所在位置;★如发生停电,应立即关闭总电源;★请勿改变参数、数量及其它设定值。
数控铣床 电气说明书
XK5040
使用说明书
(电气部分)
共9页
第8页
电器元件清单
序号
名称
代号
规格及型号
单位
数量
备注
1
空气断路器
QF1
DZ15-40/390
只
1
电源总开关
2
空气断路器
QF2
3P10A
只
1
控制变压器
3
空气断路器
QF3
3P10A
只
1
控制变频器
4
空气断路器
QF4
0.4A过载跳闸,辅助常开点
只
1
冷却电机
个
2
25
导线
BVR6mm2、BVR4mm2BVR0.75mm2黑色
主电路
26
导线
BVR1mm2黑色
控制电路
27
导线
BVR1mm2、BVR0.5mm2蓝色
28
导线
BVR6mm2黄绿色
29
导线
BVR2.5mm2黄绿色
30
导线
BVR1mm2黄绿色
31
导线
BVR1mm2红色
32
护套线
BVR 2X0.5mm2
1主要用途、适用范围
XK5040数控铣床(配“世纪星”HNC-21TD系统)是一种功能先进的通用数控机床。它具有双功率节能及高刚性、高精度的特点,是理想的高效精加工设备,广泛适用于汽车、军工、教学以及其它机械行业的各种电器技术参数(见表1)
表1
序号
项目
2
伺服控制
X轴:半闭环
Y轴:半闭环
Z轴:半闭环
3
反馈元件
数控车床操作手册教材
第一章概述肯迈得CNC系统是一基于PC平台具开放式特点的数控系统。
它是由研制开发的、具有自主版权的性能优异的数控系统。
一、CNC系统的主要特点:1.系统采用PC机作为控制核心,软硬件资源丰富。
2.性能价格比高,经济型的价格,中高档数控系统的功能。
3.用户界面菜单化,控制按键软件化,全汉化的界面结构,适合中国国情,形成中国人自己的高性能的CNC控制系统,便于修改,便于升级。
二、CNC系统的主要功能1.菜单式操作整个运行过程都有汉字信息提示,易学易用,用户只需通过简单培训即可操作使用。
2.多种方式输入用户加工零件的描述信息·现场全屏编辑零件的加工指令代码·RS232串口传送的加工指令代码·用手动加工零件时,系统自动记录的刀具轨迹数据(录返)3.示教功能在进入切削前,系统在CRT上动态模拟显示刀具轨迹及坐标、加工干涉以检验程序的正确性。
4.自动运行功能·启动,暂停,自动升、降速处理·加工程序的循环执行·主轴速度和进给速度的倍率调整·加工时实时显示刀具轨迹及坐标、切削进程和加工干涉的状况5.手动运行功能·快速点动定位及定长进给·录返、回零6.立即执行功能在此状态下能键入一行指令,立即分析、执行,使得操作灵活方便。
7.参数设置和坐标系设定功能能对加工指令,G00、G01、G02、G03的进给速度,显示比例和刀具比例,刀具和棒料的定义参数及刀具长度补偿等进行设定。
8.各种控制功能·点定位、直线、圆弧等的插补功能·螺纹加工功能·刀架、主轴等I/O口管理功能9.用户服务功能·文件管理·用户在线帮助、用户指南三、车床CNC系统的结构及应用范围1.系统结构系统集控制器、驱动器、电源变压器于一体,便于调试,控制器可以根据用户要求分别与反应式步进、混和式步进、直流伺服、交流伺服驱动器及电机配套使用。
纽威数控车床电气操作
电气操作手册 文件号:NL11-9375-1K(M)
NL201HS NL251SA NL253SA NL322HA
NL201HA NL201SA NL201HAC NL251T NL251HAC
NL402HA
NL502T
NZ
NL635HA
3
操作.............................................................................................................................................. 10
3.1
2
概述................................................................................................................................................ 9
2.1
3.2.3.8 手动刀位号..................................................................................................................................15
3.2.3.9 进给倍率......................................................................................................................................16
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9.37床头按钮站控制元件位置图58
9.38机床电器位置图(-) 59
9.39机床电器位置图㈡60
9.40尾座电器位置图61
附件
1.802D随机文件1套
2.PC应用软件1套
RT100X60/20Q-NC
使用说明书
共61页
第1页
1、概述
RT100X60/20Q-NC机床为数控轧辊车床。主要用于加工平辊、开孔型辊和其它回转类零件。
机床共有三处操作地点:床头、刀架按钮站、尾座。
电力装备由三相交流50Hz,380V,电源供电。动力回路为~380V,交流控制回路为~110V,由变压器TC4(380/110V)获得,电磁阀电源,由TVC3整流电源获得。数控系统及PLC电源由变压器TC2(380/220V)和稳压电源TVC2(220/-24V)获得,PC输出用直流电源由TVC1整流电源获得。照明回路为~220V,通过照明变压器TC3(160VA,380/~24V)获得。
机床的电气控制系统采用了SINUMERIK 802D数控系统。机床的主轴为交流伺服主轴,具有C轴功能。机床的刀架为两轴数控,Z轴,X轴全闭环控制,采用交流伺服电动机驱动,驱动装置均采用了SIMODRIVE 611U。刀架上把合有四工位动力刀架,动力刀架可车削、由交流电动机驱动。
机床的主运动为花盘的旋转运动,进给运动为大刀架的纵向运动和横刀架的横向运动,辅助传动为尾座移动、四边工位动力刀架换刀运动。
若使刀架运动,可通过802D的NC键盘将有关数据在编辑状下输入到CNC的程序存储区。然后选择802D有关工作方式,启动程序工作。则机床各部分按编制的程序进行各种动作。
SA2为工作方式选择,有手动、自动,返回参考点,手动数据输入四种方式.SB5为单段运行,SB3数控起动,SB4数控停止,SB2为超程保护,SB6复位按钮,SB7快速,SB8、SB9为X轴点动,SB10、SB11为Z轴点动。
2.5刀架电气控制
本机床的刀架进给运动为两轴控制,横向为X轴移动,纵向为Z轴移动,驱动电机采用两台交流伺服电动机1FT6103-8AF71-1AG0型,驱动装置采用SIMODRIVE 611U。刀架控制采用SINUMERIK 802D数控系统。数控系统的操作在刀架按钮站上进行,有CRT彩色显示器及操作键盘,有关操作请详见802D操作说明书。
4、故障报警及复位11
5、机床照明12
6、维修送电说明12
7、其它12
8、电气设备清单13~21
9、附图
9.1电源控制电气原理图22
9.2电源控制电气原理图23
9.3电源控制电气原理图24
9.4电源控制电气原理图25
9.5电动机控制电气原理图26
9.6电动机控制电气原理图27
9.7 802D接口总连接电气原理图28
分别选择Ⅰ档、Ⅱ档。在编入上述指令之前,主轴必须处于停车状态,即先使主轴停车,然后开始变档。
当自动发出M代码变档指令后,则相应档位的离合器动作,主电动机做断续低速转动,当自动接收到所选档位的行程开关压合信号后,即停止变档操作。
在手动工作方式时,若需进行主轴变档,操作者应先通过刀架按钮站上的主轴变档选择开关SA6进行选择。档位选择完成后,按压变速按钮SB23,则相应档位的离合器动作,电动机做断续低
在自动工作方式下,通过在零件加工程序中编入M04指令来实现主轴反转控制,当运行程序到M04指令并执行该指令时,通过CNC与PC通讯,将向CNC发出主轴使能信号,主轴将以编入的S值选择反向旋转。速度可通过选择开关SA3调节。
2.4.3主轴正点控制
在手动工作方式下,按压刀架按钮站上主轴正点按钮SB15-3,主轴正转运行,放松按钮SB15-3,主轴即停止运转。
编号:Q1Z/SW5107
RT100X60/20Q-NC
数控轧辊车床
使用说明书
最大车削直径:1000mm
出厂编号:
(电气部分)
中华人民共和国
齐重数控装备股份有限公司
RT100X60/20Q-NC
使用说明书
共4页
第1页
页次
1、概述1
2、机床操作顺序说明2
2.1操作准备2
2.2油泵电动机控制2
2.3机床工作方式3
RT100X60/20Q-NC
使用说明书
共61页
第3页
在手动方式时,用刀架按钮站上的按钮可对主轴、刀架等进行独立操作控制。
在自动工作方式时,机床的各种动作,(主轴、刀架)是通过零件程序指令控制的。其中辅助功能用M代码,主轴转速功能用S代码,刀架运动用G代码等有关编程指令清详见802D编程说明书。
2.4主轴电气控制
进给电动机M21:IFT6101-8AF71-1AG0 3000r/min
进给电动机M22: IFT6103-8AF71-1AG0 3000r/min床头润滑电机M1:Y802-4-B5型,0.75KW,2A,380V,1390r/min.
尾座油泵电机M2:1.5KW,380V.尾座移动电机M5:Y90L-6-B5型,1.1KW,3.2A,380V,910r/min.套筒移动电机M6:Y90L-6-B5型,1.1KW,3.2A,380V,910r/min.铁屑输送装置M31:380V;1.1KW。
在手动工作方式下,按压刀架按钮站上主轴停止按钮SB14-3,可使主轴停止运转。
本机床主轴具有C轴功能,主轴与C轴转换时,可在加工程序中用M70、M71进行转换。主轴作为C轴使用时,指示灯HL2亮。
2.4.6主轴联锁保护及报警
无论在自动或手动工作方式时,当润滑系统,电机及交流变频调速装置出现故障时,使立即产生报警,CNC将根据报警类别显示不同的报警号,或延时后自动停车予以保护,提醒操作者加以处理。
2.5.2选择功能
在自动工作方式下,通过CRT上菜单操作可分别实现“M01有效”、“空运行”、“跳程序段”。
当按“M01有效”时,则程序执行到M01指令时,程序将停止运行。
当按“空运行有效”时,则程序将快速运行。
当按“跳程序段有效”时,则程序前有“/”标志的程序将不予执行。
2.5.3返回参考点
在机床的参考点处,设有两个参考点减速开关SQ9、SQ10。当机床需返回参考点时,首先将SA2选择到回参考点方式,然后按压SB8或SB10,则相应的轴以机床设定的速度,向返回参考点的方向快速移动。当撞块碰到参考点减速开关SQ9、SQ10时,则向CNC发出减速信号,刀架以系统设定的低速继续移动。在撞块移过开关后,参考点减速开关复位,同时将信号的变化发送给CNC,数控开始寻找栅格信号,找到后,机床停止移动。
2.5.4进给超程及限位保护6
2. 6电动刀台7
RT100X60/20Q-NC
使用说明书
共4页
第2页
2.7尾座电气控制7
2.7.1尾座的放松夹紧控制8
2.7.2尾座的前后移动控制8
2.7.3尾座的润滑控制9
2.8套筒电气控制9
2.8.1套筒的放松夹紧控制9
2.8.2套筒的前后移动控制10
3、机床紧急停止11
在自动工作方式下,通过在零件加工程序中编入M03指令来实现工作台正转控制,当运行程序到M03指令并执行该指令时,通过CNC与PC通讯,将向CNC发出主轴使能信号,主轴将以编入的主轴速度S值选择正向旋转。速度可通过选择开关SA3调节。
2.4.2.2主轴反转控制
在手动工作方式下,按压位于刀架按钮站上的主轴反转按钮SB25,主轴电动机M20反转起动,主轴反向旋转,指示灯HL23-3亮。按压按钮SB14-3,主轴停止。
冷却电机M12:380V,50HZ,2900r/min,0.75KW,3.4A
2.机床操作顺序说明
2.1操作准备
若要使机床工作,首先合上控制电柜上自动空气断路器QF1接通总电源,合上电柜内全部空气开关,这时控制电柜上白色信号灯HL02亮,绿色信号灯HLO1熄灭,同时接通了控制变压器TC2、TC3、TC4整流电源TVC1、TVC2、TVC3。数控系统及PC控制电源接通、PC输出电源接通,为开动机床做好准备。
9. 26床头电气接线图47
9. 27刀架电气接线图48
9. 28尾座套筒电气接线图49
RT100X60/20Q-NC
使用说明书
共4页
第4页
9.29尾座套筒电气接线图50
9.30操作站接线图51
9.31电气接线表52
9.32电气接线表53
9.33电气接线表54
9.34电气接线表55
9.35刀架按钮站控制元件位置图56
为了使机床在有润滑的情况下工作,应首先起动油泵电动机。
2.2油泵电动机控制
首先按压按钮SB12,PC检测到此信号后,控制接通主轴油泵电动机M1。油泵电机工作正常后,使进给伺服电源接触器KM20得电,为进给伺服控制系统接通主电源。
2.3机床工作方式
机床设有四种工作方式;手动工作方式,自动工作方式,手动数据输入方式,返回参考点方式。由选择开关SA2实现。
2.5.1手轮操作
在刀架钮站上设有一个手轮,可对X轴、Z轴、C轴分别进行控
RT100X60/20Q-NC
使用说明书
共61页
第6页
制。刀架面板上有增量选择开关SB21。手轮轴选择开关X、Z、C在802D软件上实现。手轮需在CNC的JOG方式或自动方式下操作。顺时针旋转手轮,则刀架正向位移,逆时针旋转手轮,则刀架反向位移。
RT100X60/20Q-NC
使用说明书
共61页
第2页
本机床共有下列电动机
主轴交流电动机RT100X60/20Q-NC --M20:1PH7224-2NC03-0BJ0型,55KW,117A 380V,700-3100r/min,(M7为配套风机,380V)
RT80X50/16Q-NC—M20:1PH7186-2ND03-0BJ0 51KW,118A 380V 1000-4500R/MIN,(M7为配套风机,380V)