模糊控制在机器人技术中的应用
模糊逻辑在控制系统中的应用
模糊逻辑在控制系统中的应用第一章:引言近年来,随着科技的不断发展和智能控制技术的不断突破,控制系统在各个领域得到了广泛应用和不断完善。
而在这一系列技术中,模糊逻辑控制系统已经成为了研究的热点之一。
本章将从控制系统的发展背景和模糊逻辑的概念出发,介绍模糊逻辑在控制系统中的应用重要性和价值。
第二章:控制系统的发展背景控制系统是指通过传感器获取环境信息,然后经过处理和计算,以控制执行器实现对被控制对象的控制和调节。
控制系统的发展源远流长,可以追溯到人工智能的初期。
在传统的控制方法中,控制器通过固定的规则和精确的数学模型来实现对被控制对象的精确控制。
然而,这种传统的控制方法在模糊的环境下表现不佳,对于系统的非线性和不确定性较强的情况下并不适用。
第三章:模糊逻辑的概念及特点模糊逻辑是一种基于模糊集合理论的数学工具,用于处理模糊的、不确定的和模糊的信息。
与传统的二值逻辑不同,模糊逻辑允许信息以模糊的形式处理,并在处理中考虑到信息的不确定性。
模糊逻辑的特点有三个方面:一是具有灵活性和适应性,可以适应不同的环境和应用需求;二是能够处理模糊的、不确定的信息,并能够在信息不完整的情况下做出合理的决策;三是能够模拟人类的思维过程,使得系统的决策更加符合人们的直观判断。
第四章:模糊逻辑在控制系统中的应用非常广泛,具有很高的实用价值。
一方面,模糊控制系统可以通过模糊推理来处理模糊和不确定的输入信息,并输出模糊的控制命令。
这种方式可以提高控制系统对复杂系统的适应能力,使得系统能够在给定的环境下做出更为合理的决策。
另一方面,模糊控制系统还可以通过模糊控制器来实现对多变量和非线性系统的控制。
模糊控制器能够根据系统的输入和输出关系,在不需要准确的数学模型的情况下进行控制,具有一定的鲁棒性和适应性。
第五章:模糊逻辑在工业控制中的应用在工业控制领域,模糊逻辑的应用也是非常重要和广泛的。
例如,在温度控制系统中,模糊控制器可以根据温度的模糊输入和模糊输出关系来实现对温度的精确控制。
模糊控制在并联机器人中的应用

l
I }
奉
目前在对 6自由度的并联机器人 已进行 了广泛深入研 究的 的原理与驱动方法很接近。 而且步进电动机的闭环应用 , 极大地 基础上 , 人们逐渐认识 到在 某些 场合 少 自由度并联机器人 由于 提高 了它们的性能 , 其应用也越来越广泛。鉴于此 , 本设计采 用 其 驱动元件少 、 造价低 、 结构 紧凑l 有较商 的实用价 值 , 更具 有 步进电动机为驱动部件 , 并通过闭环方式 , 以期满足三平移并联
( i guS i t cadT cncl nvri , lo o i If m t nIs tt,h ni g2 0 , hn ) 2a s c ni eh i iesy Eet ne no ai tue Z e j n 0 3 C ia jn e f n i aU t r r o ni a 1 2
; 果 实 结 均 明 较 的 制 果 结 及 际 果 表 有 好 控 效 。 l ; 关 词 并 机 人步 电 机模 控 键 : 联 器 ;进 动 ;糊 制 l ; 【 sa] e or e ol 一O tsiapal b W vtt dt A tc T t io v 3DFalolal ro Oieg dn i brth mo nn ne nan re ot Snsa a l t l ie s ;t sni ∞ ele T a u i aec e z n ls dl i rf cn de d hd n il。o e uyOrst i e t a ut o . e n o p e d ma n n f t zCt e s aw l t f if oy m t h ;a rTn n r t eabnn de细e iehcr 。i ier l t s e帆ig hh eioc ln eo snns cl t t i h f. taa se tud i a t rpdgt ooh el c r mt e t a T fe
模糊控制理论及应用

模糊控制理论及应用模糊控制是一种基于模糊逻辑的控制方法,它能够应对现实世界的不确定性和模糊性。
本文将介绍模糊控制的基本原理、应用领域以及未来的发展趋势。
一、模糊控制的基本原理模糊控制的基本原理是基于模糊逻辑的推理和模糊集合的运算。
在传统的控制理论中,输入和输出之间的关系是通过精确的数学模型描述的,而在模糊控制中,输入和输出之间的关系是通过模糊规则来描述的。
模糊规则由模糊的IF-THEN语句组成,模糊推理通过模糊规则进行,从而得到输出的模糊集合。
最后,通过去模糊化操作将模糊集合转化为具体的输出值。
二、模糊控制的应用领域模糊控制具有广泛的应用领域,包括自动化控制、机器人控制、交通控制、电力系统、工业过程控制等。
1. 自动化控制:模糊控制在自动化控制领域中起到了重要作用。
它可以处理一些非线性和模糊性较强的系统,使系统更加稳定和鲁棒。
2. 机器人控制:在机器人控制领域,模糊控制可以处理环境的不确定性和模糊性。
通过模糊控制,机器人可以对复杂的环境做出智能响应。
3. 交通控制:模糊控制在交通控制领域中有重要的应用。
通过模糊控制,交通信号可以根据实际情况进行动态调整,提高交通的效率和安全性。
4. 电力系统:在电力系统中,模糊控制可以应对电力系统的不确定性和复杂性。
通过模糊控制,电力系统可以实现优化运行,提高供电的可靠性。
5. 工业过程控制:在工业生产中,许多过程具有非线性和不确定性特点。
模糊控制可以应对这些问题,提高生产过程的稳定性和质量。
三、模糊控制的发展趋势随着人工智能技术的发展,模糊控制也在不断演进和创新。
未来的发展趋势主要体现在以下几个方面:1. 混合控制:将模糊控制与其他控制方法相结合,形成混合控制方法。
通过混合控制,可以充分发挥各种控制方法的优势,提高系统的性能。
2. 智能化:利用人工智能技术,使模糊控制系统更加智能化。
例如,引入神经网络等技术,提高模糊控制系统的学习和适应能力。
3. 自适应控制:模糊控制可以根据系统的变化自适应地调整模糊规则和参数。
模糊控制技术发展现状及研究热点

模糊控制技术发展现状及研究热点【模糊控制技术发展现状及研究热点】一、引言模糊控制技术是一种基于模糊逻辑的控制方法,它能够处理不确定性和模糊性的问题,在工业控制、自动化系统、人工智能等领域得到了广泛的应用。
本文旨在介绍模糊控制技术的发展现状以及当前的研究热点。
二、模糊控制技术的发展现状1. 发展历程模糊控制技术起源于上世纪60年代,由日本学者松井秀树首次提出。
随后,美国学者津田一郎对模糊控制进行了深入研究,并提出了模糊控制的基本理论框架。
自此以后,模糊控制技术得到了快速发展,并在工业控制领域得到了广泛应用。
2. 应用领域模糊控制技术在许多领域都有广泛的应用。
其中,工业控制是模糊控制技术的主要应用领域之一。
通过模糊控制技术,可以实现对复杂工业过程的控制和优化。
此外,模糊控制技术还应用于自动驾驶、机器人控制、电力系统控制等领域。
3. 发展趋势随着信息技术的迅速发展,模糊控制技术也在不断创新和进步。
目前,模糊控制技术正朝着以下几个方向发展:(1)深度学习与模糊控制的结合:将深度学习技术与模糊控制相结合,可以提高模糊控制系统的性能和鲁棒性。
(2)模糊控制理论的拓展:研究者们正在不断完善模糊控制理论,以适应更加复杂和多变的控制问题。
(3)模糊控制技术在新领域的应用:随着科技的发展,模糊控制技术将在更多领域得到应用,如医疗、金融等。
三、模糊控制技术的研究热点1. 模糊控制算法优化目前,研究者们正致力于改进模糊控制算法,以提高控制系统的性能。
其中,遗传算法、粒子群算法等优化算法被广泛应用于模糊控制系统的参数优化和规则提取。
2. 模糊控制系统的建模方法模糊控制系统的建模是模糊控制技术研究的重要内容之一。
目前,常用的建模方法包括基于经验的建模方法、基于数据的建模方法以及基于物理模型的建模方法。
研究者们正在探索更加准确和高效的建模方法。
3. 模糊控制技术在自动驾驶领域的应用随着自动驾驶技术的快速发展,模糊控制技术在自动驾驶领域的应用也备受关注。
人工智能中的模糊理论与模糊推理
人工智能中的模糊理论与模糊推理人工智能(Artificial Intelligence,AI)是计算机科学的一个重要分支,旨在让机器能够模仿和模拟人类的智能行为。
在AI的发展过程中,模糊理论(Fuzzy Theory)和模糊推理(Fuzzy Reasoning)是扮演着重要角色的两个概念。
模糊理论和模糊推理可以帮助我们解决那些具有不确定性和模糊性的问题,并且在模拟人类的智能过程中起到了关键作用。
本文将详细介绍,并讨论其应用领域。
1. 模糊理论模糊理论是由扎德(Lotfi A. Zadeh)于1965年提出的,它是一种能够处理现实世界中不确定性和模糊性问题的数学工具。
与传统的逻辑学不同,模糊理论引入了“模糊集合”的概念,用来表示不同程度的隶属度。
在传统的二值逻辑中,一个元素只能属于集合或者不属于集合,而在模糊集合中,一个元素可以同时属于多个集合同时也可以部分属于某个集合。
模糊集合的定义通常采用隶属度函数(membership function)来表示,这个函数将每个元素在0到1之间的值来表示其属于程度。
这种思想可以很好地应用到处理模糊性问题的场景中。
例如,当我们描述一个人的高矮时,可以定义一个“高”的模糊集合,然后通过隶属度函数来表示每个人对于“高”的隶属度。
2. 模糊推理模糊推理是一种基于模糊逻辑的推理方法,它是基于模糊集合的运算来实现推理的过程。
模糊推理通过模糊集合之间的关系来表示模糊规则,从而得到推理的结果。
通常,模糊推理过程包括模糊化、模糊规则的匹配、推理方法的选择以及解模糊化等步骤。
在模糊化的过程中,将输入转化为模糊集合,并通过隶属度函数给出每个输入值的隶属度。
在模糊规则的匹配阶段,将输入的模糊集合与模糊规则进行匹配,根据匹配程度得到相应的隶属度。
然后,根据推理方法的选择,确定输出值的隶属度。
最后,通过解模糊化的过程,将模糊输出转化为确定的输出。
模糊推理的一个重要特点是能够处理模糊和不确定性的信息。
基于模糊控制的自主寻迹机器人研究
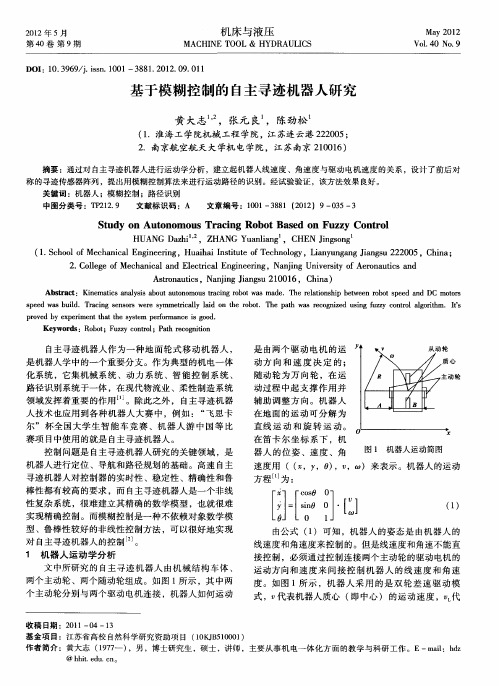
自主寻迹机器人 作为一种 地面轮 式移 动机器 人 , 是机器人学 中的一个重要分支 。作为典型 的机 电一体 化系统 ,它集机械系 统 、动力 系统 、智 能控 制 系统 、 路径识别系统于一体 ,在现代物流业 、柔 性制造系统 领域发挥着重要 的作用 …。除此之外 , 自主寻迹机器
能 力 ,增 强 在 海 洋 环境 中应 用 的可 靠 性 。
参 考文 献 :
【】 1 王海波 , 丰. 王庆 水下拖 曳升沉补偿 系统设计 及其 内模
鲁棒控制 [ ] 机械工程学报 ,00 8 : 8—12 J. 2 1( )1 2 3.
【 】冯 刚 , 剑中 , 2 李 谭佳. 向海洋环境 的绞车传动控制系统 面
21 0 2年 5月
机床与液压
MACHI NE T0OL & HYDRAUL C IS
M a 01 v2 2
第4 O卷 第 9期
Vo. 0 No 9 14 .
D :1 .9 9 j i n 10 OI 0 3 6 /.s . 0 1—3 8 . 0 2 0 . 1 s 8 12 1. 90 1
基 于 模 糊控 制 的 自主 寻 迹 机 器人 研 究
黄 大志 ,张元 良 , 一 ,陈劲松
(.淮海工 学 院机 械 工程 学 院 ,江 苏连 云港 2 20 ; 1 2 05 2 .南京航 空航 天 大学机 电学院 ,江 苏南京 2 0 1 ) 10 6
摘要 :通过对 自主寻迹机器人进行运动学分析 ,建立起机器人线 速度 、角速度 与驱动 电机 速度 的关 系 ,设 计了前后对 称 的寻迹传感器阵列 ,提 出用模糊控制算法来进行运动路径 的识别 。经试 验验证 ,该 方法效 果 良好。
述: I FQ=L N = BT E ( : S BA D H L H N 1 L ) I FQ=L N = BT E = B BA DH R H Nt L , D I FQ=o A D H=OT E P N H N V= B I FQ=L N : BT E = S BA D H L H N V P O
智能控制技术(模糊控制)
INTELLIGENT CONTROL
随着系统复杂程度的提高,将难以建立系统的精 确数学模型和满足实时控制的要求。 人们希望探索一种除数学模型以外的描述手段和 处理方法。 例如: 骑自行车 水箱水温控制
2011年4月10日
INTELLIGENT CONTROL
模糊控制就是模仿上述人的控制过程,其中包 含了人的控制经验和知识。从这个意义上来说,模 糊控制也是一种智能控制。模糊控制方法既可用于 简单的控制对象,也可用于复杂的过程。 模糊控制是以模糊集合论作为数学基础。 1965年L.A.Zandeh(美国教授)首先提出了模糊集 合的概念。 1974年E.H.Mamdani(英国教授)首先将模糊集合 理论应用于加热器的控制。 典 型 例 子
2011年4月10日
INTELLIGENT CONTROL
二、模糊控制的特点 特点: (1)无需知道被控对象的数学模型 (2)是一种反映人类智慧思维的智能控制 (3)易被人接受 (4)构造容易 (5)鲁棒性好
2011年4月10日
INTELLIGENT CONTROL
第二节
模糊集合论基础 一、模糊集合的概念 二、模糊集合的运算 三、隶属函数的建立 四、模糊关系
2011年4月10日
INTELLIGENT CONTROL
现代控制系统的数学模型难以通过传统的数学工具 来描述。就是说,采用数学工具或计算机仿真技术的传 统控制理论,已无法解决此类系统的控制问题。 从生产实践中可以看到,许多复杂的生产过程难以 实现的目标,可以通过熟练的操作工、技术人员或专家 的操作得到满意的控制效果。 如何有效地将熟练操作工、技术人员或专家的经验 知识和控制理论结合,去解决复杂系统的控制问题,就 是智能控制研究的目标。
模糊滑模控制及应用

s dngm od on r llw ,i r otc,sr o c to , eos c n o h rap cso ha tc sse saew i l e l i i e c to a n ob is e v on r l a r pa e a d t e s e t fc o y tm r dey usd. i Ke y wor s: z o ro ;l i g m od o r l c m p e s tm d f z c nt l si n u y d e c nto ; o lx yse
用。
【 词 】 糊控 制 关键 模
滑模 控 制 复 杂 系统
中图 分 类号 : 4 . 文献 标 识 码 : 文 章 编 号 :0 8 1 3 ( 0 1 3 4 4 - G6 2 0 A 1 0 — 7 9 2 1 ) 、 —1 3 3
F z y S i i g M o e Co t o y t m n tSUs u z l n - d d n r lS s e a d I e
良好 的效 果 , 绝 大 多数 控 制都 是 渐 进 地 实现 跟 踪 任 务 的 。 但 随 着控 制理 论 实践 的不 断 深化 , 用 面 的 不 断拓 宽 , 代 科 学技 应 现 术 向控 制 提 出 了前 所 未 有 的 严峻 挑 战 。控 制 工 程 越 来越 多地 面临 着 更 为复 杂 的对 象 、更 为复 杂 的环 境 以 及在 此环 境 下 对 系统 性 能 要求 愈 来 愈高 的挑 战 。 面对 这 些复 杂情 况 , 统 的基 传 于精 确数 学 模 型 的 控 制 理论 的局 限 性 日趋 明 显 ,于是 出 现 了 诸如 变 结 构 控 制 、 自适 应 控 制 、 糊 控 制 、 经 网 络 控 制 以 及 模 神
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模糊控制在机器人技术中的应用在机器人领域,控制算法是实现智能机器人关键的技术之一,而模糊控制算法在机器人的控制中起到了重要作用。
本文将介绍模糊控制算法在机器人领域中的应用。
一、什么是模糊控制
模糊控制是一种通过将模糊逻辑应用于控制系统,从而实现对非线性、模糊、不确定的系统进行控制的方法。
它的主要优势在于它可以模拟人类控制者的经验和直观,并且可以对非线性系统进行控制,这些系统很难用传统控制方法进行控制。
二、模糊控制在机器人领域的应用
1. 路径规划
在机器人的路径规划中,需要对机器人的运动轨迹进行控制,使得机器人能够按照预设的路径运动。
传统的控制方法对于非线性和复杂的运动轨迹并不适用,而模糊控制算法可以通过对路径规划算法进行模糊化来实现对机器人的控制。
2. 机械臂控制
机械臂是机器人的重要组成部分,在制造业、医疗、物流等领域得到了广泛应用。
机械臂在控制过程中需要解决的是位置、速度和力控制等问题。
传统的控制方法很难对这些问题进行有效的控制,而模糊
控制算法可以通过对机械臂的位置、力等参数进行模糊化来实现对机
械臂的精确控制。
3. 智能交互
在机器人和人类交互的过程中,机器人需要根据人类的动作和语言
来进行控制。
这需要机器人拥有智能处理人类行为语言的能力。
模糊
控制算法可以通过对人类语言和手势等的模糊化来实现机器人对人类
动作和语言的智能处理。
4. 机器视觉
机器视觉是机器人感知和环境理解的一种技术,通过对环境信息的
采集和处理来实现机器人的智能控制。
然而,在实际应用过程中,由
于环境信息的不确定性以及光照、噪声等问题,对机器视觉进行有效
的控制是一项非常具有挑战性的任务。
模糊控制算法可以通过对机器
视觉算法的模糊化来解决这些问题,从而实现对机器视觉的精确控制。
三、小结
模糊控制算法在机器人技术中的应用得到了广泛的关注和应用。
在
实际应用中,由于机器人技术的种类和应用场景的不同,对模糊控制
算法的具体实现也会有所不同。
但是,总的来说,模糊控制算法为机
器人技术的发展和应用提供了重要的技术支持。