模糊控制技术发展现状及研究热点
模糊控制技术发展现状及研究热点

模糊控制技术发展现状及研究热点【模糊控制技术发展现状及研究热点】一、引言模糊控制技术是一种基于模糊逻辑的控制方法,它能够处理不确定性和模糊性的问题,在工业控制、自动化系统、人工智能等领域得到了广泛的应用。
本文旨在介绍模糊控制技术的发展现状以及当前的研究热点。
二、模糊控制技术的发展现状1. 发展历程模糊控制技术起源于上世纪60年代,由日本学者松井秀树首次提出。
随后,美国学者津田一郎对模糊控制进行了深入研究,并提出了模糊控制的基本理论框架。
自此以后,模糊控制技术得到了快速发展,并在工业控制领域得到了广泛应用。
2. 应用领域模糊控制技术在许多领域都有广泛的应用。
其中,工业控制是模糊控制技术的主要应用领域之一。
通过模糊控制技术,可以实现对复杂工业过程的控制和优化。
此外,模糊控制技术还应用于自动驾驶、机器人控制、电力系统控制等领域。
3. 发展趋势随着信息技术的迅速发展,模糊控制技术也在不断创新和进步。
目前,模糊控制技术正朝着以下几个方向发展:(1)深度学习与模糊控制的结合:将深度学习技术与模糊控制相结合,可以提高模糊控制系统的性能和鲁棒性。
(2)模糊控制理论的拓展:研究者们正在不断完善模糊控制理论,以适应更加复杂和多变的控制问题。
(3)模糊控制技术在新领域的应用:随着科技的发展,模糊控制技术将在更多领域得到应用,如医疗、金融等。
三、模糊控制技术的研究热点1. 模糊控制算法优化目前,研究者们正致力于改进模糊控制算法,以提高控制系统的性能。
其中,遗传算法、粒子群算法等优化算法被广泛应用于模糊控制系统的参数优化和规则提取。
2. 模糊控制系统的建模方法模糊控制系统的建模是模糊控制技术研究的重要内容之一。
目前,常用的建模方法包括基于经验的建模方法、基于数据的建模方法以及基于物理模型的建模方法。
研究者们正在探索更加准确和高效的建模方法。
3. 模糊控制技术在自动驾驶领域的应用随着自动驾驶技术的快速发展,模糊控制技术在自动驾驶领域的应用也备受关注。
模糊控制技术现状及研究热点

模糊控制技术发展现状及研究热点摘要:综合介绍丁模糊控制技术的基本原理和发展状况,重点总结丁近年来该研究领域的热点问题,并对今后的发展前景进行了展望。
关键词:模糊控制结构分析稳定性白适应控制1模糊控制的热点问题模糊控制技术是一项正在发展的技术,虽然近年来得到了蓬勃发展,但它也存在一些问题,主要有以下几个方面:(1)还投有形成完挫的理论体系,没有完善的稳定性和鲁棒性分析,系统的设计方法(包括规则的获取和优化、隶属函数的选取等);(2)控制系统的性能小太高(稳态精度牧低,存在抖动及积分饱和等问题):(3)自适应能力有限。
目前,国内外众多专家学者围绕着这些问题展开了广泛的研究,取得了一些阶段性成果,下面介绍一下近期的主要研究热点。
2模糊控制系统的稳定性分析任何一个自动控制系统要正常工作,首先必须是稳定的。
由于模糊系统本质上的非线性和缺乏统一的系统描述,使得人们难以利用现有的控制理论和分析方法对模糊控制系统进行分析和设计。
因此,模糊控制理论的稳定性分析一直是一个难点课题,未形成较为完善的理论体系。
正因为如此,关于模糊系统的稳定性分析近年来成为众人关注的热点,发表的论文较多,提出了各种思想和分析方法。
目前模糊控制系统稳定性分析方法主要有以下几种:(1)李亚普诺夫方法(2)基于滑模变结构系统的稳定性分析方法(3)描述函数方法(4)圆稳定性判据方法模糊控制系统的稳定性分析还有相平面法、关系矩阵分析法、超稳定理论、Popov判据、模糊穴——穴映像、数值稳定性分析方法以及最近出现的鲁棒控制理论分析方法和LMI(矩阵不等式)凸优化方法等。
3自适应模糊控制器的研究为了提高模糊控制系统的自适应能力,许多学者对自适应模糊控制器进行了研究,研究方向主要集中在以下方面。
(1)自校正模糊控制器自校正模糊控制器是在常规模糊控制的基础上,采用加权推理决策,并引入协调因子,根据系统偏差e和偏差变化ec的大小,预测控制系统中的不确定量并选择一个最佳的控制参数或控制规则集,在线自动调整保守和大胆控制的混合程度,从而更全面确切地反映出入对诸因素的综合决策思想,提高系统的控制精度和鲁捧性能。
模糊逻辑与模糊控制技术的发展与研究
2、模 糊 逻 辑 与 模 糊 控 制
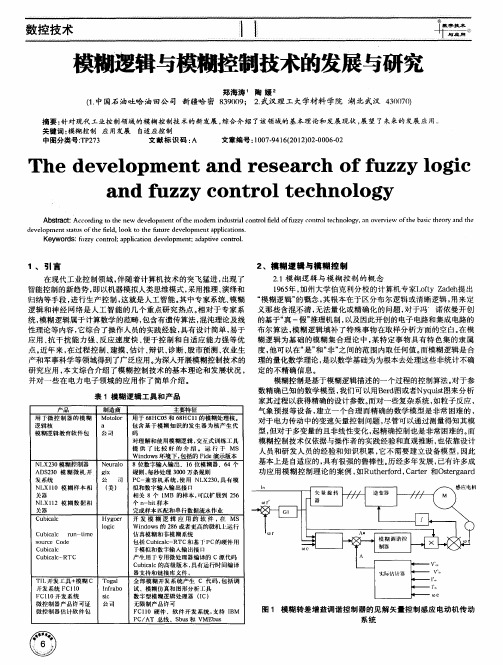
21模 糊逻 辑 与模 糊控 制 的概 念 . 16 年 , 9 5 加州大学伯克利分校 的计 算机 专家L f a e 提出 ot Z d h y “ 模糊逻辑” 的概念 , 其根本在于区分布尔逻辑或清晰逻辑 , 来定 用 义那些含混不 清 , 无法量化或精确化 的问题 , 对于冯 诺 依曼开创 的基 于 “ 一假 ” 理 机 制 , 真 推 以及 因此 开 创 的 电子 电 路 和集 成 电路 的 布 尔 算 法 , 糊 逻 辑 填 补 了特 殊 事 物 在 取 样 分 析 方 面 的空 白 。 模 模 在 糊逻辑 为基 础的模糊集合理论 中 , 某特定事物具有 特色集的隶属 度, 他可以在“ 和 “ 之 间的范 围内取任何值 。 是” 非” 而模糊逻辑是合 理的量化数学理论 , 以数学基础为为根本去处理这些非统计 不确 是 定的不精确信息 。 模糊控制是基 于模糊逻辑描述 的一个过程的控制算法 。 对于参 数精 确已知的数学模型 , 我们可 以用B r 图或者Ny us图来分析 ed qi t 家其过程 以获得精确的设计参数 。 而对一些复杂系统 , 如粒子反应 , 气象预报等设 备 , 建立一个合理而精确 的数学模型是非常 困难的 , 对于 电力 传 动 中的变 速 矢量 控 制 问题 , 管 可 以通 过测 量 得 知 其 模 尽 型, 但对于 多变量的且非线性变化 , 起精确控制也是非常困难的。 而 模 糊 控 制 技术 仅 依 据 与操 作 者 的 实 践 经验 和 直 观 推 断 , 也依 靠 设 计 人 员 和 研 发 人 员 的经 验 和 知 识 积 累 , 不 需要 建 立设 备模 型 , 它 因此 基本上是 自适应的 , 具有很强的鲁棒性 。 历经多年发展 , 已有许多成 功应用模糊控 制理论的案例 , 如Ruh rod C re tefr , atr和O tr a r s g ad e
洗衣机模糊控制原理毕业论文
毕业论文洗衣机模糊控制原理中文摘要洗衣机自问世以来,经过一个多世纪的发展,现正呈现出全自动、多功能、大容量、高智能、省时节能的发展趋势。
近年来,电子技术、控制技术、信息技术的不断完善、成熟,为上述发展趋势提供了坚强的技术保障。
L·A·Zadeh教授最早提出了模糊集合理论,由此产生了模糊控制技术,其突出的优点是:不需要对被控对象建立精确的数学模型。
对于复杂的、非线性的、大滞后的、时变的系统来说,建立数学模型是非常困难的。
全自动滚筒洗衣干衣机的自动化、智能化控制正是一种难以建立精确数学模型的控制问题,采用模糊控制技术,可以很方便的控制洗衣干衣过程。
模糊控制全自动滚筒洗衣干衣机是通过模糊推理找出最佳洗涤烘干方案,以优化洗涤烘干时间、洗净程度、烘干效果,最终达到提高效率,简化操作,、节水节电省时的效果。
模糊控制全自动滚筒洗衣干衣机属于创新项目,填补国内空白,达到国际先进水平。
它的研制成功,必将大大推动我国乃至世界洗衣机行业的发展。
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它是从行为上模仿人的模糊推理和决策过程的一种智能控制方法。
该方法首先将操作人员或专家经验编成模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。
关键词:洗衣干衣机、家用滚筒式、模糊控制技术、模糊控制器、模糊控制规则ABSTRACTIt has been developed for more than one century since the emergence of washing machine.Now the tendency to develop is fully- automatism,Multifunction,large capacity,high intelligence,time and energy saving.Recently,the tendency has been guaranteed substantially with the perfection and mature of electronic technology,control technology and information technology.Professor L·A·Zadeh first put forward the Theory of Fuzzy Set,from which the technology of Fuzzy Control arise.It is extraordinary virtue is:There is no definite need to establish the exact math model of the controlled object.It is very convenience to establish mathematical models to the systems with very complex,non.1inear,large—lag and timely change characteristic.And it is the very problem incontrol to establish the exact mathematical model in fully-automatic washing—drying machines automatism and optimize.It is very convenient to control the process of washing and drying to use the technology off contr01.The fuzzy control of the fully—automatism front loading washing· drying machine, is through the fuzzy inference to find the best plan of washing-drying,optimize the time of washing and drying,the degree of cleaning and the effect of drying SO to reach the intention of raising the efficiency,predigesting the operate and saving the water and electricity.Fuzzy control fully—- automatism front loading washing drying machine is an innovate project,which padded the blankness in the world and achieve international advanced level.The Success of the research will impel the development of the washing machine industry greatly.Key Words:washing—drying machine,household front loading,fuzzy control technology,fuzzy controller,fuzzy control rule .目录:第一章:简介1.绪言2.简单论述第二章:模糊控制理论和技术基础1. 模糊控制原理2. 模糊控制器的构成3. 模糊控制系统的工作原理4. 模糊控制系统分类5. 模糊控制器的设计6. 模糊控制器设计实例-洗衣机模糊控制第三章:程序实现1.模糊控制理论和技术基础总结2.程序设计及实现1 绪论第一章绪言国际相关产品的发展水平、现状及发展趋势:1965年,美国加里弗尼亚大学控制理论教授L·A·Zadeh(扎德)提出模糊集理论。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
模糊控制
模糊控制在洗衣机控制研究中的摘要模糊控制是首先对控制对象按照人们的经验总结出模糊规则,然后由单片机对这些信息按照模糊规则做出决策来完成自动控制。
首先,本文将概述模糊控制的基本原理和特点,并研究模糊控制在洗衣机中的应用方面。
例如,在洗涤衣物过程中,衣物的多少,面料的软硬等都是模糊量,所以首先做大量的实验,总结出人为的洗涤方式,从而形成模糊控制规则。
其次,本文将根据模糊控制原理对洗衣机的水位控制进行具体的研究,具体主要是模糊传感器的应用,即利用模糊传感器实现对洗衣机水位的测量,并把得到的数据经单片机A/D 转换后,输出结果。
最后,通过MATLAB仿真器在实际设计中的应用,模拟研究是模糊洗衣机加水和排水的模糊控制。
通过建立模糊推理系统,完成模拟量的函数关系及函数图像,验证得出模糊传感器较以往的传感器更加智能化,便捷化,为人们的生活节约了许多不必要的麻烦。
关键词: 模糊控制,隶属度函数,模糊推理系统,模糊传感器第一章绪论1.1选题背景1964年美国的L.A.Zadeh教授创立了模糊集合理论,1974年英国的E.HMamdani研制出第一个模糊控制器。
模糊控制不需要了解对象的精确数学模型,根据专家知识进行控制,近十年来得到了广泛的应用。
模糊控制系统是一种自动控制系统,它是以模糊数学、模糊语言形式的知识表示和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统。
它的组成核心是具有智能性的模糊控制器,无疑,模糊逻辑控制系统是一种典型的智能控制系统,在控制原理上它应用模糊集合论、模糊语言变量和模糊逻辑推理知识,模拟人的模糊思维方法,对复杂过程进行控制。
模糊控制系统基本结构如图 1.1所示。
从图上可以看出,模糊控制系统的主要部件是模糊化过程、模糊推理和决策(含知识库和规则库的形成)和反模糊化。
在结构上与传统的控制系统没有太大差别。
主要不同之处在于模糊控制系统采用了模糊控制器。
图1.1模糊控制的基本结构1.2 国内外研究情况随着科技的飞速发展,更多的新兴技术和新兴企业不断孕育而生,模糊技术就其中的显著代表,作为模拟人类思维而转化为机械自动化运作的主要依托技术,模糊技术的发展速度令人惊叹,现如今已逐步取代原始手工机械操作,并越来越多的运用到了人们的日常生活之中。
【毕业论文】模糊PID控制技术在双容水箱液位控制中的应用与研究

摘 要双容水箱液位控制系统具有过程控制中动态过程的一般特点:大惯性、大时延、非线性,难以对其进行精确的控制,从而使其成为过程控制教学、试验和研究的理想实验平台。
因此,双容水箱液位控制系统在耦合非线性系统的监控和故障诊断算法的研究中得到了广泛的关注。
本课题首先分析了双容水箱液位控制系统工艺流程,在MPCE-1000实验系统上模拟双容水箱系统的基础上推导双容水箱的数学模型并在Simulink上进行仿真。
由于双容水箱是一个典型的非线性时变多变量耦合系统,用常规的控制手段很难实现理想的控制效果。
因此,引入模糊控制技术,将模糊控制与传统的PID控制结合,设计出模糊PID控制器,并进行Simulink仿真。
仿真结果表明,模糊PID控制器的控制效果比常规PID控制器的控制效果理想。
关键词:双容水箱,模糊PID,液位控制AbstractTwo-capacity water tank level control system is in the process control dynamic process of the general characteristics: large inertia, the time delay, non-linear, not their precise control, thereby making it a teaching process control, testing and research of the ideal experimental plat form . Therefore, the dual-capacity water tank level control system in the coupled non-linear system monitoring and fault diagnosis method in the study received widespread attention.The first issue of a dual-capacity water tank level control system and its mathematical modeling process.In experiments on MPCE-1000the basis of dual-capacity water tanks derived a mathematical model and simulation in Simulink on.Because of the capacity of water tanks is a typical multi-variable nonlinear time-varying coupling system,using conventional means of control difficult to achieve the desired effect of control.Therefore,the introduction of fuzzy control technology,fuzzy control with the traditional combination of PID control,designed fuzzy PID controller,and Simulink simulation.Key words:Two-capacity water tanks, fuzzy PID, Level Control第一章 前 言 (1)1.1 研究背景及意义 (1)1.1.1 选题背景 (1)1.1.2 研究意义 (2)1.2 本文的主要研究内容 (3)第二章 模糊PID控制与MPCE1000试验系统简介 (4)2.1 改善模糊控制系统的稳态性能 (4)2.1.1 FuzzyPID混合控制器 (4)2.1.2比例模糊PI控制器 (5)2.2 MPCE1000试验系统 (6)2.2.1 小型流程设备台 (6)2.2.2动态数字模型 (6)2.2.3 硬件自动测试 (6)第三章 模糊控制理论基础 (7)3.1 双容水箱液位控制系统的数学建模 (7)3.2 模糊自动控制的基本思想 (8)3.3 模糊控制特点 (10)3.4 模糊控制系统的组成 (11)3.5 模糊控制系统的设计 (12)3.5.1模糊控制器的设计原则 (12)3.5.2 模糊控制器的常规设计方法 (13)3.5.3模糊控制器组成 (14)3.6 模糊控制与PID 算法的结合 (16)第四章 双容水箱液位控制系统的仿真研究 (19)4.1 MATLAB 简介 (19)4.1.1 模糊逻辑工具箱 (19)4.1.2 SIMULINK 工具箱 (19)4.1.3 MATLAB 在模糊控制仿真中的应用 (19)4.2 模糊PID 双容水箱液位控制的仿真 (20)4.2.1 模糊控制器的simulink 仿真 (20)4.2.2 双容水箱液位控制的模糊PID 仿真 (33)4.3 对比与结论 (33)第五章 结论与展望 (35)5.1 研究工作总结 (35)5.2 展望 (35)参 考 文 献 (37)致 谢 (38)第一章 前 言1.1 研究背景及意义1.1.1 选题背景双容水箱液位的控制作为过程控制的典型代表是众多过程控制学者研究的热点之一。
《2024年轮毂电机驱动电动汽车联合制动的模糊自整定PID控制方法研究》范文
《轮毂电机驱动电动汽车联合制动的模糊自整定PID控制方法研究》篇一一、引言随着科技的不断进步,电动汽车的研发和应用日益广泛。
在电动汽车的驱动与制动系统中,轮毂电机驱动技术以其高效率、低噪音和低成本等优势备受关注。
为了进一步优化电动汽车的制动性能和稳定性,本文将针对轮毂电机驱动电动汽车联合制动的模糊自整定PID控制方法进行深入研究。
二、背景与现状分析电动汽车的制动系统在行驶过程中扮演着至关重要的角色,它不仅影响车辆的制动性能,还直接关系到行车安全。
传统的PID控制方法在电动汽车的制动控制中得到了广泛应用,但其在处理非线性、时变和不确定性的系统时,往往难以达到理想的控制效果。
近年来,模糊控制技术因其对复杂系统的良好适应性,逐渐成为研究热点。
因此,将模糊控制与PID控制相结合,形成模糊自整定PID控制方法,成为提高电动汽车制动性能的重要途径。
三、轮毂电机驱动电动汽车联合制动系统轮毂电机驱动电动汽车的联合制动系统由多个轮毂电机组成,通过控制各个电机的制动力,实现车辆的稳定制动。
该系统具有结构简单、制动力分配灵活等优点,但同时也面临着非线性、时变和不确定性等问题。
为了解决这些问题,本文提出了一种模糊自整定PID控制方法。
四、模糊自整定PID控制方法1. 模糊控制原理:模糊控制是一种基于模糊集合理论的控制方法,它通过模拟人的思维过程,对复杂系统进行近似处理。
在本文中,我们利用模糊控制器对PID控制的参数进行在线调整,以适应系统的非线性、时变和不确定性。
2. 参数自整定:根据系统的实际运行状态,模糊控制器对PID控制的参数进行实时调整。
通过不断地调整PID参数,使系统达到最优的控制效果。
3. 控制策略:在轮毂电机驱动电动汽车的联合制动系统中,我们采用模糊自整定PID控制方法对制动力进行分配和控制。
具体而言,我们根据车辆的行驶状态、路面情况等因素,利用模糊控制器对PID参数进行调整,以实现制动力的大化利用和车辆的稳定制动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模糊控制技术发展现状及研究热点
一、引言
模糊控制技术是一种基于模糊逻辑的控制方法,它能够处理不确定性和模糊性的问题,广泛应用于各个领域。
本文将对模糊控制技术的发展现状进行概述,并介绍当前的研究热点。
二、模糊控制技术的发展现状
1. 历史回顾
模糊控制技术最早由日本学者松原英利于1973年提出,随后逐渐发展起来。
在过去的几十年中,模糊控制技术在工业控制、机器人、交通系统等领域得到了广泛应用,并取得了显著的成果。
2. 应用领域
模糊控制技术被广泛应用于以下几个领域:
(1) 工业控制:模糊控制技术在工业自动化中起到了重要的作用,能够处理复杂的控制问题,提高生产效率和产品质量。
(2) 机器人:模糊控制技术在机器人控制中广泛应用,能够使机器人具备自主决策和适应性。
(3) 交通系统:模糊控制技术在交通信号控制、智能交通系统等方面有着广泛的应用,能够提高交通效率和减少交通事故。
(4) 医疗领域:模糊控制技术在医疗设备控制、疾病诊断等方面有着广泛的应用,能够提高医疗效果和患者生活质量。
3. 发展趋势
随着科技的不断进步,模糊控制技术也在不断发展。
目前,模糊控制技术的发展趋势主要体现在以下几个方面:
(1) 模糊控制算法的改进:研究者们正在不断改进模糊控制算法,提高控制系统的性能和鲁棒性。
(2) 模糊控制与其他技术的结合:模糊控制技术与神经网络、遗传算法等其他智能控制技术的结合,能够进一步提高控制系统的性能。
(3) 模糊控制系统的优化:研究者们正在研究如何优化模糊控制系统的结构和参数,以提高系统的控制性能。
(4) 模糊控制技术在新领域的应用:模糊控制技术正在拓展到新的应用领域,如金融、环境保护等。
三、模糊控制技术的研究热点
1. 模糊控制系统的建模与设计
(1) 模糊控制系统的建模方法:研究者们正在研究如何准确地建立模糊控制系统的数学模型,以便更好地进行控制系统设计和分析。
(2) 模糊控制系统的设计方法:研究者们正在研究如何设计出性能优良的模糊控制系统,以满足不同应用领域的需求。
2. 模糊控制算法的改进与优化
(1) 模糊控制算法的改进:研究者们正在改进模糊控制算法,以提高控制系统的性能和鲁棒性。
(2) 模糊控制算法的优化:研究者们正在研究如何优化模糊控制算法的结构和参数,以提高算法的效率和准确性。
3. 模糊控制技术在新领域的应用
(1) 金融领域:模糊控制技术在金融风险控制、投资决策等方面有着广泛的应用,能够提高金融系统的稳定性和效率。
(2) 环境保护领域:模糊控制技术在环境监测、污染治理等方面有着广泛的应用,能够提高环境保护的效果和效率。
四、结论
模糊控制技术是一种能够处理不确定性和模糊性问题的控制方法,在工业控制、机器人、交通系统等领域有着广泛的应用。
当前,模糊控制技术的发展趋势主要体现在模糊控制算法的改进与优化、模糊控制与其他技术的结合、模糊控制系统的优化和模糊控制技术在新领域的应用等方面。
未来,随着科技的不断进步,模糊控制技术将在更多领域发挥重要作用,并为人类社会带来更多的便利与进步。