无刷直流电机结构
永磁无刷直流电机的结构
永磁无刷直流电机的结构一、引言永磁无刷直流电机是一种高效率、高功率密度的电机,被广泛应用于家用电器、工业自动化、交通运输等领域。
本文将介绍永磁无刷直流电机的结构。
二、永磁无刷直流电机的基本结构1.转子永磁无刷直流电机的转子由永磁体和轴承组成。
永磁体通常采用稀土永磁材料,具有高矫顽力和高能量密度等特点,能够提供强大的磁场。
轴承则起到支撑和定位转子的作用。
2.定子永磁无刷直流电机的定子由铜线圈和铁芯组成。
铜线圈通常采用绕组方式制成,通过在定子中产生旋转磁场来驱动转子旋转。
铁芯则起到集中和导向磁场的作用。
3.传感器为了实现精确控制和保护,永磁无刷直流电机通常配备传感器。
传感器可以测量旋转速度、位置和温度等参数,并将其反馈给控制器进行处理。
4.控制器永磁无刷直流电机的控制器是一个重要的部件,它可以实现电机的启停、速度和位置控制、保护等功能。
控制器通常由微处理器、功率驱动芯片和其他电路组成。
三、永磁无刷直流电机的工作原理永磁无刷直流电机的工作原理基于法拉第定律和洛伦兹力定律。
当通过定子绕组通以直流电时,会在定子中产生一个旋转磁场。
由于转子上有永磁体,所以会在转子上产生一个与定子磁场相互作用的力,从而使转子开始旋转。
传感器可以测量转子位置和速度,并将其反馈给控制器进行处理,从而实现精确控制。
四、永磁无刷直流电机的优点1.高效率:由于采用了无刷结构,永磁无刷直流电机具有高效率和低能耗。
2.高功率密度:由于采用了稀土永磁材料和先进加工技术,永磁无刷直流电机具有高功率密度。
3.精确控制:配备传感器和控制器,可以实现精确的速度和位置控制。
4.可靠性高:由于无刷结构和传感器的使用,永磁无刷直流电机具有较高的可靠性。
五、永磁无刷直流电机的应用1.家用电器:如洗衣机、空调、吸尘器等。
2.工业自动化:如机床、自动化生产线等。
3.交通运输:如电动汽车、轮船、飞机等。
六、结论永磁无刷直流电机是一种高效率、高功率密度的电机,具有精确控制和高可靠性等优点,被广泛应用于家用电器、工业自动化和交通运输等领域。
有刷直流电机和无刷直流电机的结构及工作原理

有刷直流电机和无刷直流电机的结构及工作原理一、有刷直流电机的结构及工作原理1.1 有刷直流电机的组成部分有刷直流电机主要由以下几个部分组成:定子、转子、电刷、换向器和轴承。
其中,定子和转子是电机的核心部件,电刷和换向器则起到传输电流和实现换向的作用,轴承则保证了电机的正常运转。
1.2 有刷直流电机的工作原理有刷直流电机的工作原理主要是利用电刷在换向器表面产生摩擦力,使电流在定子和转子之间的线圈中产生磁场,从而实现电机的转动。
当电流通过定子线圈时,会产生一个磁场,这个磁场会与转子上的永磁体相互作用,使转子产生旋转力矩。
而电刷则在换向器表面不断滑动,当电流方向改变时,电刷与换向器之间的接触点也会随之改变,从而实现电流方向的切换。
这样,电机就能连续不断地转动下去。
二、无刷直流电机的结构及工作原理2.1 无刷直流电机的组成部分无刷直流电机与有刷直流电机相比,最大的区别在于它采用了无刷设计,即没有传统的电刷。
因此,无刷直流电机的主要组成部分包括:定子、转子、霍尔传感器、电子控制器和轴承等。
其中,定子和转子是电机的核心部件,霍尔传感器用于检测转子的转速,电子控制器则负责控制电机的运行,轴承则保证了电机的正常运转。
2.2 无刷直流电机的工作原理无刷直流电机的工作原理与有刷直流电机类似,也是通过电磁感应原理实现的。
当电流通过定子线圈时,会产生一个磁场,这个磁场会与转子上的永磁体相互作用,使转子产生旋转力矩。
由于无刷直流电机采用了无刷设计,因此不需要传统的电刷来实现换向。
相反,霍尔传感器会实时监测转子的转速,并将这些信息传递给电子控制器。
电子控制器根据这些信息来判断是否需要进行换向操作,从而实现连续不断地转动下去。
三、总结有刷直流电机和无刷直流电机虽然在结构上有所不同,但其工作原理都是基于电磁感应原理。
有刷直流电机通过电刷在换向器表面产生摩擦力来实现换向和连续转动;而无刷直流电机则采用霍尔传感器和电子控制器来实现换向和连续转动。
永磁无刷直流电机的构造

永磁无刷直流电机的构造永磁无刷直流电机是一种重要的电动机类型,其构造与传统的有刷直流电机有所不同。
在本文中,我们将深入探讨永磁无刷直流电机的构造,了解其工作原理以及与其他类型电机的区别。
一、永磁无刷直流电机的构造永磁无刷直流电机由多个关键组件构成,包括转子、定子和电子调速器。
下面我们将逐一介绍这些部件的功能和特点。
1. 转子转子是电机中的旋转部分,由永磁体和轴承组成。
其中,永磁体通常由稀土永磁材料制成,具有较高的磁场强度和矫顽力,能够提供较大的转矩。
轴承则用于支撑转子的转动,通常采用滚珠轴承或磁悬浮轴承。
2. 定子定子是电机中的固定部分,由线圈、铁心和绕组等组成。
线圈通常由导电材料绕制而成,绕制方式包括单层绕组和多层绕组。
铁心则用于增强磁场,并且通过绕组与转子的磁场相互作用,实现电能到机械能的转换。
3. 电子调速器电子调速器是永磁无刷直流电机的控制中枢,通过电子器件对电机的电流进行控制和调节。
常见的电子调速器包括三相桥式整流器、逆变器和控制芯片等。
电子调速器通过控制转子上的永磁体和定子上的绕组之间的电流关系,实现对电机转速和扭矩的精准调控。
二、永磁无刷直流电机的工作原理永磁无刷直流电机的工作原理基于磁场的相互作用,其具体过程如下:1. 磁场形成当电流通过定子绕组时,会在定子和转子之间产生一个旋转磁场。
这个旋转磁场由定子绕组的电流和转子上的永磁体形成。
2. 磁场相互作用转子上的永磁体与定子绕组之间的磁场相互作用,导致转子受到力矩的作用而开始旋转。
这个力矩的大小与磁场强度、永磁体形状和绕组电流等因素有关。
3. 电子调速器控制电子调速器通过控制定子绕组的电流和磁场强度,可以实现对电机转速和扭矩的调节。
通过改变电子调速器的工作方式,可以实现电机的正转、反转和调速等功能。
三、永磁无刷直流电机与其他电机的区别与传统的有刷直流电机相比,永磁无刷直流电机具有以下特点:1. 无刷结构永磁无刷直流电机采用了无刷结构,消除了传统电机中刷子的使用,减少了能量损耗和机械磨损,并提高了电机的可靠性和寿命。
无刷直流电机的结构及工作原理
无刷直流电机的结构及工作原理无刷直流电机,这个名字听起来就有点科技范儿,没错,它就是那种让我们的生活更加智能的“小帮手”。
你知道吗?在这个快节奏的时代,谁还愿意跟那些笨重的刷子电机打交道呢?无刷电机一出,大家都爱不释手。
嘿,想想看,电动牙刷、无人机、甚至电动车,里面都有它的身影,简直是家家户户的“隐形英雄”。
那什么是无刷直流电机呢?它的名字就给了我们不少提示。
无刷,顾名思义,就是没有刷子。
刷子在电机里是干嘛的呢?它们负责导电,把电流传递到转子上去。
但这玩意儿可麻烦了,时间久了就容易磨损、发热,甚至还会产生噪音。
可无刷电机可不怕这个,干干净净,省心又省力。
就像那些不喜欢打扫卫生的人,简直就是一大福音。
再来看看它的结构。
简单来说,无刷直流电机主要由定子、转子和控制器三部分组成。
定子是静止的部分,转子是转动的部分,而控制器则是它们之间的桥梁。
定子上绕着电线圈,转子上则是永磁体,嘿,这磁力可厉害了,让转子在电流的作用下不停地旋转。
想象一下,转子就像个在舞池里旋转的小舞者,随着音乐的节拍嗨起来,真是个灵动的小家伙。
再聊聊它的工作原理。
无刷电机的工作就像是高科技的魔法。
通过控制器,电流被精确地送到定子上的线圈,这样就产生了旋转的磁场。
这个磁场就像是一个看不见的推手,把转子推得飞快。
没错,推手可得用得巧,控制器就像是个DJ,调配着电流的节奏,让电机转得又快又稳,毫不费力。
这时候,有些朋友可能会问,为什么要选无刷电机呢?嘿,这就得说说它的优势了。
效率高,能量损耗小,简直是节能环保的先锋。
噪音低,运行安静得就像小猫咪在打盹,不会打扰到你安静的生活。
维护简单,毕竟没有刷子,少了很多麻烦,保养起来轻松得很。
可以说,无刷直流电机真是现代科技的宠儿。
不过,咱也不能光说好话。
无刷电机虽然好,但它的控制器可得花点钱。
技术要求高,对电路设计和编程的知识都有点要求。
就像玩游戏,有时候得先升级装备,才能挑战更高级别的敌人。
不过,有些东西就是这样,越是高端,越要精细,这也是值得的,对吧?咱们也聊聊无刷电机的应用场景。
空心杯无刷直流电机结构

空心杯无刷直流电机结构空心杯无刷直流电机是一种特殊的电机结构,常常被应用在机器人、摄像头、航空航天等领域。
其主要特点是结构紧凑、功率密度高、响应速度快、噪音低等。
空心杯无刷直流电机由一个转子和一个定子组成。
转子是由若干个永磁体组成的圆盘,中间有一个空心孔。
而定子由若干个电磁体组成的环形铁芯组成,与转子的永磁体相对。
在定子的铁芯内部有若干个绕组,它们连接到逆变器产生的电流。
绕组所产生的电流会根据铁芯的磁场产生磁力,使得转子旋转。
空心杯无刷直流电机的转子的永磁体与定子电磁体所产生的磁场是交替不断变化的。
转子磁极交替经过定子绕组,以此产生转矩,使得转子旋转。
由于转子的空心孔,机械结构变得很简单,并且允许光传输或气体通过转子中心区域。
这是对一些特定应用的要求。
因此该结构的设计和制造是非常符合实际需求的。
空心杯无刷直流电机功率密度较高,能够提供非常高的速度响应和大的加速度,同时有很好的效率。
由于永磁体和电磁体在转子及定子上紧凑排列,可以在小型高端驱动器中使用。
而且这种电机结构噪音很低,更适合需要保持静音运行的应用。
在航空航天领域,空心杯无刷直流电机常常被应用在卫星姿态控制,它能够旋转非常迅速并保持精确的定位,使得卫星能够精确地指向地面终端和其它卫星。
此外,它还可以改善地球对卫星发射的控制问题。
在机器人技术中,它被应用在机器人臂的运动控制,帮助机器人完成工件的繁重任务。
总之,空心杯无刷直流电机作为一种高效、小型、静音的电机结构,将会被广泛应用于机器人、摄像头、航天航空及其它领域。
三相无刷直流电机系统结构及工作原理

三相无刷直流电机系统结构及工作原理BLDCM的系统结构包括三相无刷直流电机和驱动电路两部分。
无刷直流电机通常由三个线圈组成,分别称为A相、B相和C相。
这三个线圈通过导电材料连接在一起,形成一个稳定的旋转结构。
驱动电路则通过电子集成电路控制器来控制电流引导到不同的线圈上,以实现电机的旋转。
BLDCM的工作原理基于三个关键的电磁现象:霍尔效应、电磁感应和电压引导。
首先,霍尔效应是通过在电机中使用霍尔传感器来检测磁极的位置,从而确定旋转方向和速度。
霍尔传感器可以感应到每个磁极的位置,并发送信号到电子控制器。
根据这些信号,电子控制器可以准确地控制电流的流向。
其次,电磁感应现象是指当电流通过电机线圈时,会产生磁场。
这个磁场会与电机中的磁极交互,从而导致电机旋转。
电流的流向和大小直接影响电机的旋转速度和力矩。
电子控制器通过调整电流的大小和方向来控制电机的转速和转向。
最后,电压引导是指在电机旋转的过程中,电流的流向需要不断改变。
电子控制器需要根据磁极的位置和旋转速度,及时切换电流的方向,以保持电机的平稳旋转。
这种技术称为电流闭环控制,它可以提高电机的控制精度和稳定性。
BLDCM的驱动电路由电子集成电路控制器(Electronic Speed Controller,ESC)控制,ESC中集成了霍尔传感器和控制算法。
ESC可以实时感知电机转子位置,并根据需求调整电流的大小和方向。
除了控制电流,ESC还可以监测电机温度和保护电机免受电压过高或电流过大等因素的损害。
总之,三相无刷直流电机是通过电子集成电路控制器来驱动的电机。
它具有高效率、低噪音和长寿命的特点。
其工作原理基于霍尔效应、电磁感应和电压引导等关键技术,通过电子控制器实现电流的精确控制和调节。
这种电机系统结构与传统的有刷直流电机相比,具有更大的优势和发展潜力。
有刷直流电机和无刷直流电机的结构及工作原理

有刷直流电机和无刷直流电机的结构及工作原
理
电机,那个让你家的电器都活起来的小家伙,你知道它是怎么工作的吗?有刷直流电机和无刷直流电机,这两种电机各有千秋,但它们之间的区别可不仅仅是“刷”这个字那么简单哦。
咱们得说说有刷直流电机。
这个小家伙啊,它的转子上有个碳刷,就像是个勤快的小伙计,不停地在换向器上跑,把电能从电源那里转过来,再送到电机的另一端去。
这个过程就像是你在家里做饭,有一个人在前面忙碌着炒菜,另一个人在后面端菜一样,有刷直流电机就是那个忙前忙后的家伙。
而说到无刷直流电机,那可就不一样了。
这个小家伙没有碳刷,它的转子是永磁体,就像是一个不用电的超级英雄,自己就能转动,不需要别人帮忙。
这就好比是你家里的电器,都是你自己动手,不需要别人的帮助一样。
有刷直流电机和无刷直流电机到底谁更好呢?这个问题啊,其实没有绝对的答案,得看你的需求是什么。
如果你想要一个能一直转个不停的“小马达”,那有刷直流电机可能更适合你;但如果你想要一个更省电、更环保的“智能小助手”,那无刷直流电机可能就是你的菜。
不过话说回来,无论是有刷直流电机还是无刷直流电机,它们都有自己的优点和缺点。
有刷直流电机结构简单,成本相对较低,但效率不高,容易发热;而无刷直流电机虽然结构稍微复杂一些,但效率更高,寿命也更长。
所以啊,选择什么样的电机,还得看你想要什么。
如果你追求的是效率和寿命,那无刷直流电机可能是更好的选择;如果你更看重的是成本和简单性,那有刷直流电机或许更适合你。
选对了电机,你的电器就能更好地为你服务啦!。
无刷直流电机结构类型和基本原理

无刷直流电机结构类型和基本原理无刷直流电机是一种通过使用电子技术将电流根据转子位置进行控制的电机。
它相比传统直流电机具有许多优点,包括高效率、高转矩密度、高速控制精度和长寿命等。
在本文中,我们将对无刷直流电机的结构、类型和基本原理进行详细介绍。
无刷直流电机的结构包括转子、定子和电子控制系统。
转子通常由永磁材料制成,其磁极数目可以是偶数或奇数。
定子由线圈绕制而成,线圈通常由多个相位组成,通过电子控制系统来控制不同相位的线圈通电或断电。
电子控制系统由传感器、电机驱动器和控制器组成,用于检测转子位置并控制电流。
根据无刷直流电机的结构和特点,可以将其分为多种类型,包括表面磁化型、内磁化型、外磁化型和混合型等。
其中,表面磁化型是最常见的一种类型。
它的转子表面覆盖着永磁体,定子绕组则位于转子外部。
这种结构的优点是转子磁阻较小,嵌入转子永磁体的空间利用率较高,具有较高的功率密度和离轴转矩。
另一方面,内磁化型的转子磁阻较大,内置转子永磁体的空间利用率较低,但它具有较高的机械强度和对高温环境的适应能力。
外磁化型则是将永磁体安装在定子上,转子则有多个传感器用于检测位置。
混合型采用了表面磁化和内磁化的结合,具有较高的功率和转矩密度。
无刷直流电机的基本原理是根据转子位置控制定子线圈通电。
在每个转子位置,控制器会将相应的线圈通电以产生磁场,从而使转子受到力矩的作用而旋转。
为了确保电流与转子位置的匹配,需要使用传感器来检测转子位置,并将这些信息传递给控制器。
控制器根据传感器提供的信息来控制线圈的通断,以保持转子在正确位置上旋转。
无刷直流电机的运行模式可以通过改变线圈通电方式和控制器的工作方式来实现。
最常见的控制方式是电枢反转控制,其中电流的方向可以通过改变线圈通电的相序来改变。
另一种常见的控制方式是方波控制,其中控制器会以一定的频率和占空比来开关线圈电流。
这种方式可以实现电机的速度控制,并且通常具有较高的效率。
总结起来,无刷直流电机是一种通过使用电子技术将电流根据转子位置进行控制的电机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷直流电机结构
2
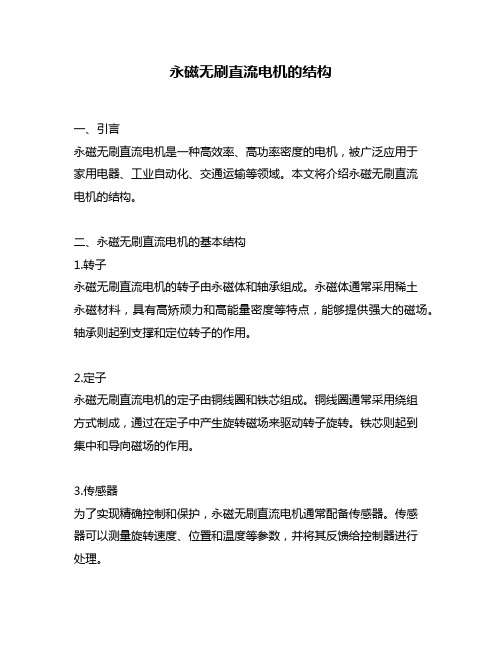
———————————————————————————————— 作者: ———————————————————————————————— 日期: 1. 磁回路分析法 图1-4 (摘自Freescale PZ104文档) 在图1-4中,当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁力线方向与外磁力线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。 “当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大”。注意这里说的是“力矩”最大,而不是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。 当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,见图1-5所示:
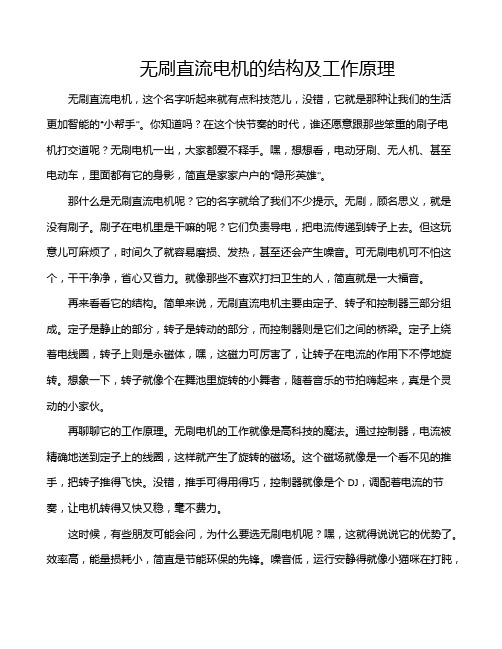
图1-5 (摘自Freescale PZ104文档) 如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。改变电流方向的这一动作,就叫做换相(commutation)。注意:何时换相只与转子的位置有关,而与转速无关。 以上是两相两级无刷电机的工作原理,,下面我们来看三相两极无刷电机的构造。
2. 三相二极内转子电机结构
定子三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最常用。 图1-6 (修改自Freescale PZ104文档) 图1-6显示了定子绕组的联结方式(转子未画出),三个绕组通过中心的连接点以“Y”型的方式被联结在一起。整个电机就引出三根线A, B, C。当它们之间两两通电时,有6种情况,分别是AB, AC, BC, BA, CA, CB,图1-7(a)~(f)分别描述了这6种情况下每个通电线圈产生的磁感应强度的方向(红、兰色表示)和两个线圈的合成磁感应强度方向(绿色表示)。 在图(a)中,AB相通电,中间的转子(图中未画出)会尽量往绿色箭头方向对齐,当转子到达图(a)中绿色箭头位置时,外线圈换相,改成AC相通电,这时转子会继续运动,并尽量往图(b)中的绿色箭头处对齐,当转子到达图(b)中箭头位置时,外线圈再次换相,改成BC相通电,再往后以此类推。当外线圈完成6次换相后,内转子正好旋转一周(即360° )。再次重申一下:何时换相只与转子位置有关,而与转速无关。 图1-8中画出了换相前和换相后合成磁场方向的比较与转子位置的变化。一般来说,换相时,转子应该处于,比与新的合成磁力线方向垂直的位置不到一点的钝角位置,这样可以使产生最大的转矩的垂直位置正好处于本次通电的中间时刻。
(a) AB相通电情形 (b) AC相通电情形 (c) BC相通电情形 (d) BA 相通电情形
(e) CA 相通电情形 (f) CB相通电情形 图1-8 换相前和换相后的情形(摘自Freescale PZ104文档) 3. 三相多绕组多极内转子电机的结构
搞清了最简单的三相三绕组二极电机,我们再来看一个复杂点的,图1-9(a)是一个三相九绕组六极(三对极)内转子电机,它的绕组连线方式见图1-9(b)。从图(b)可见,其三相绕 组也是在中间点连接在一起的,也属于星形联结方式。一般而言,电机的绕组数量都和永磁极的数量是不一致的(比如用9绕组6极,而不是6绕组6极),这样是为了防止定子的齿与转子的磁钢相吸而对齐,产生类似步进电机的效果,此种情况下转矩会产生很大波动。
(a) 电机定子与转子结构 (b) 绕组联结方式(摘自5iMX论坛) 图1-9 三相9绕组3对极内转子无刷直流电机结构 二二导通时的6种通电情况自行分析,原则是转子的N(S)极与通电绕组的S(N)极有对齐的运动趋势。图1-10给出了一个对齐的运动趋势的图例。
图1-10 某2相通电时的转子磁极和定子磁极对齐运动的最终位置 1.4 无刷直流电机转矩的理论分析
1. 传统的无刷电机绕组结构 其线圈形状见图1-16,线圈包围整个转子。电机三相绕组示意图见图1-17。 图1-16 磁场中的线圈 图1-17 电机绕组和转子抽象示意图 图1-17中为简略示意起见,每相只画出了一个线圈,其实每相应该有N匝线圈。其绕组联结方式为:A’、B’、C’端通过星形联结在一起,A、B、C为电机的三根引出线。无刷直流电机定子绕组结构如下:
2. 转子磁场的分布情况 图1-19展示了内转子磁极的磁感应强度B的分布情况。我们预定义磁感应强度方向向外为正,从图中可以看出,在0°的时候,处于正反方向交界处,磁感应强度为零,然后开始线性增加,在A点时达到最大,然后一直保持恒定值不变,直到B点开始下降,到180°的时候下降到零。然后开始负向增长,在C点处达到负值最大,然后保持恒定负值不变,直到D点强度开始减弱,到 0°时又回到零。至于A点到底在几度的位置,不同的电机不一样。如果A非常接近0°的位置,上升和下降直线就会非常陡峭,“梯形波”就变成了“方波”。根据右手定则E=BLV的公式,在匀速转动下,各绕组产生的反电动势波形也呈梯形波/方波。 ——解释“梯形波/方波”是什么意思
图1-19 转子磁感应强度分布情况 与此类似,上文提到的另一种“正弦波”电机就是一种磁感应强度呈正弦波图形分布的直流无刷电机,也叫永磁同步电机。这种电机的绕组结构和我们的梯形波电机的绕组结构不太相同,进而驱动方式也不太相同,需要用到矢量分析法,由于本文只关注于梯形波的无刷直流电机,故对这种正弦波电机不展开讨论了。
3、转子的受力分析
在图1-20(a)中,AB相通电,电流处于转子产生的磁场内,根据左手定则,我们判断线圈AA’中的上半部导线A受到一个顺时针方向的电磁力,而AA’的下半部导线A’也受到一个顺时针方向的电磁力。由于线圈绕组在定子上,定子是固定不动的,故根据作用力与反作用力,定子绕组AA’会施加给转子一个逆时针方向的反作用力,转子在这个力的作用下,就转起来了。同理,与AA’的情况类似,BB’也会对转子产生一个逆时针的反作用力。当转子逆时针转过60°后,到达图1-20(b)的位置,这时线圈BB’已经到达转子磁极的边缘位置了,再转下去就要产生反方向的力了,所以这时就要换相,换成AC相通电,见图1-20(c)。这样,每过60°换相通电,转子就可以一直转下去了。 (a) AB相通电 (b) 转过60° (c) AC相通电 (d) 转过60° (e) BC相通电 (f) 转过60°
(g) BA相通电 (h) 转过60° (i) CA相通电 (j) 转过60° (k) CB相通电 (l) 转过60°
4. 一种近似分析模型 刚才的讨论全都基于一个假设,就是转子磁场的磁力线是垂直穿过绕组的导线的。但事实上,磁力线总是倾向于沿磁阻最小的路径前进,其实并不穿过导线,见下图
图1-21 磁力线分布 现仍以新西达2212电机为例,为了方便说明问题,每个绕组的N匝线圈现都简化成了一个,而且我们对所有绕组和磁极都做一了个编号,见图1-22。 AB相通电时,A1-1导线处在N极下,根据左手定则,受到一个顺时针方向的作用力,即同时施加给转子一个逆时针方向的反作用力。同时,A1-2导线处于S极下,但电流方向与A1-1相反,所以还是会施加给转子一个逆时针方向的作用力。 图1-22 新西达2212电机AB相通电时情形 1.5 换相与调速
1. 换相基本原理 (1) 转子位置与过零检测 前面已经唧唧歪歪过很多遍了,换相的时机只取决于转子的位置,那顺理成章的问题就是:转子的位置怎么测? 一种比较简单的方式是用光电编码盘,这个东西在工业上用得比较多。不过由于其价格比较贵,而且还要接联轴器等一堆乱七八糟的东西,分量也不轻,显然不适合我们做四轴用。
图1-23一种4位二进制编码盘 霍耳效应测量器件可以根据转子不同位置时的不同磁场方向分布情况,而给出1或0的输出,一般在电机的不同位置上装三个霍尔传感器,就可测出转子的位置。这就是所谓的“有感无刷电机的驱动”。接下来就是我们本文要主讲的“无感”测量方式。无传感器怎么测量?答:利用第三相的感生电动势。无感驱动方式的优点在于省略了三个霍尔传感器,整套系统分量更轻,结构更简单。回过头再去看图1-20,先看图(a)和图(b),在AB通电期间,你会发现线圈CC’的C边在图(a)中切割N极的磁力线并产生一个正向的感生电动势,在图(b)中确是切割S极的磁力线而产生一个反向的感生电动势了;C’边的情况也类似。(这里我们定义:在转子逆时针旋转时,C边切割N极磁力线和C’边切割S极磁力线产生的感生电动势为正;AA’和BB’ 也用类似的定义)。这说明,在AB相通电期间,如果我们去测量线圈CC’上的电压,会发现其间有一个从正到负的变化过程。与此类似,图(c)~图(l)中的情况也可以用相同的方法分析出来,如图1-24所示(图在下页)。这里需要说明一下的是,在AB相通电期间,不只是线圈CC’上产生感生电动势,其实AA’和BB’也在切割磁力线,也都会产生感生电动势,其电动势方向与外加的12V电源相反,所以叫“反向感生电动势”(BEMF)。其等效电路图见图1-25。
图1-25 AB相通电期间线圈AA’和BB’的等效电路
图1-24 六种通电情形下各绕组的电流和感生电动势 从图1-25可以看出,线圈绕组AA’和BB’上产生的反电动势是很大的,两个加起来几乎略小于12V。为什么呢,因为线圈绕组本身的等效电阻很小(约0.1欧左右),如果反电动势不大的话,端电压加载在线圈绕组等效电阻上,会产生巨大的电流,线圈非烧掉不可。为方便理解,我们姑且假设在额定转速下AA’和BB’各产生5.7V的反电动势,那么它们串联起来就产生11.4V的反电动势,结合图1-25看,那么加载在等效电阻上的电压就为V,最终通过绕组AB的电流就是1211.40.6−=0.6/(20.1)3×=A,看来这个假设还是比较合理的。同理,由于各绕组的结构是相同的,切割磁力线的速度也是相同的,所以线圈CC’也应该会产生一个大小约为5.7V的感生电动势;不同的是:在AB相通电期间,CC’的感生电动势会整个换一个方向,也即所谓的“过零点”。 在图1-24的t0时刻(即图1-20(a)的位置),为AB相通电刚开始时的情况,CC’产生的感生电动势的等效电路图如图1-26(a)所示;而在图1-24的t1时刻(即图1-20(b)的位置),为AB相通电快结束时的情况,CC’产生的感生电动势的等效电路图如图1-26(b)所示。