东方红X_804拖拉机的DGPS自动导航控制系统_罗锡文
无人驾驶拖拉机研制成功
j
生物质发 电促农增收
生物 质 发 电 ,即 以 秸 秆 等 农林 剩 余 物 为 原 料 产 生 电
力 ,是 可 再 生 能源 的重 要 组成 部 分 。 除 了绿 色能 源 的 意
推 广 例行 假 植 再移 栽枝 术 , 以 前 缩 短 1 天 左 右 ,对 苗 较 5 龄 打 “ 前 量 ” 使 乐平 蔬 菜 实现 了周 年 生 产 、 年 供 应 。 提 , 周 而且 通过 创新 栽培 方 式 ,种 植 莴笋 改 多行 单 沟移 栽 为 畦
衣保 2 0 年试点范 围为全 国 1%的县 ( 09 O 市、区、旗) ,以
后 逐 步扩 大 试 点 ,到 2 2 年 前 基 本 实现 全覆 盖 。这 样 , 00
义之 外 , 物 质 发 电还 因 其 变废 为 宝 , 加 蓰 民 收 入 , 生 增 而 具 有 了更 强的 “ 农” 意 义 ,秸 秆 的 处理 与 消化 也 由此 三
有 了一个更好的途 径。 亩棉 田能产生 4 0 斤秸秆 , 一 0公 卖
给 电厂 ,能 收 入 1O ; 亩 玉 米 ,产秸 秆 4 0 斤 ,增 元 一 O 0公 收 10元 ;一 亩 小 麦 ,产 秸 秆 10公 斤 ,增 收 4 0 2 O元 。 国
林 农 ,俨 然成 为林 农不 见 面又 离不 开 的 “ 技 专 家” 科 。
农机 现代化 “ 。 “
. .
l
、
由华 南 农业 大 学 罗锡 文 院士 领 导 的 学 术 团 队在 东方
农 民纯收入
红×一8 4 拉 机 上 设 计 开 发 出 了一 种 载 波 相位 差 分 全球 0拖
的幅 度 增 长 ,是 2 O多年 来 第一 次 。中央 农 + - 会 议 在 - ̄作 I 部 署 2 1 年 我 国 “ 农 ”工 作 的 “ 粮 保 供 给 、增 收 惠 0 0 三 稳 民生 、 改革 促 统 筹 、 强 基增 后 劲 ”2 字 基 本思 路 中 , 强 O
拖拉机GPS卫星导航自动驾驶技术的实践应用

器 能 够 对 车 轮 基 本 运 动 方 向进 行 控 制 , 应 用 中 对 各 项 性 能 进 行 检 测 ,行 驶 以及 确 度 问 题 ,最 后 需 要 定 期 对 拖 拉 机 GPS
在 导 航 控 制 器 基 础 上 能 够 对 车 轮 基 本 转 上下车过程中不能对方 向盘位置进行碰 卫星导航 自动驾驶技术的实践应用成效
GPS接收机能够 实时收集基站各项数据 驾驶 人员不需要通过方 向盘对行驶方 向 合区域农 业生产 以及机械化程度建立地
以及卫星信号 ,信 号接收之后能够及时 进行 控制 ,播种速度 的拟定需要控制好 面支 撑 系统 ,完 善 地 面监 控 项 目,有
向控制器传输 定位 信息。通过方 向传感 油门。驾驶人员需要定时拖拉机从具体 效改 善拖 拉 机 GPS接 收机 信号 接 受精
动 情况进行调 整 ,向液压控制阀传输各 撞 ,以免其方向产生不同程度偏移 。
卫星 导航 自动驾 驶 技术 的 实践 应用 范
施测距 ,具有 高速 率 、高精度 以及低成
3 拖 拉 机 GPS卫 星 导 航 自 动 围 ,相关 部门需要积极引入更多先进 的
本 等诸 多 的 特点 。拖 拉 机 GPS卫 星导 驾 驶 技 术 的 实 践 应 用 与 推 广 探 析 导航 仪 器 ,对 驾驶 员 GPS卫 星导 航驾
业 。 通 过 改 装 之 后 的 拖 拉 机 上 配 置 了 要 进 行 空 跑 来 确 定 AB线 ,这 样 会 对 农 规机械 作业 时间节 约近 1/4。 比如 当前
GPS自动导航 系统 ,能够确保拖拉机进 作 物出苗造成影响 ,还会 消耗 较多柴油 。 实际地块 作业面积为 630亩 ,各项作业
行整地 、播种 、施肥 、中耕等各项作业 此外 ,目前信号覆盖范 围受限 ,实 际建 操作 能够 满足质量标准 ,起垄标准符合
基于东风1204拖拉机自动导航转向控制系统设计
基于东风1204拖拉机自动导航转向控制系统设计刘雪珂;王斐;蒋林【摘要】A dynamic model for lateral tractor motion was developed on DONGFENG 1204 tractor in reference to sreering control for Lane Departure Warning System. Under the scheme of refitting an automatic hydraulic steering system, a sim-ulation model was established by SimHydraulics. then provide a fuzzy controller for such model. The Matlab/Simulink tests prove the validity and efficiency of these models with the tracking accuracy could be contolled within 1 ° .%以东风1204拖拉机为原型,通过分析拖拉机自动导航与车道偏离预警系统( LDWS )的异同,以LDWS转向控制模型为基础,推导出拖拉机动力学模型。
通过分析液压转向机构工作原理,制定了液压自动转向机构的改装方案,并利用 SimHydraulics 工具箱搭建了液压自动转向系统模型,且基于此转向模型设计了自动导航拖拉机液压转向系统模糊控制器,在 MatLab/Simulink 中进行仿真试验。
结果表明:所设计的转向系统模糊控制器具有良好的转向跟踪精度,其最大跟踪误差小于1°,控制效果良好。
【期刊名称】《农机化研究》【年(卷),期】2017(039)010【总页数】5页(P246-250)【关键词】拖拉机;自动转向;模糊控制;MatLab【作者】刘雪珂;王斐;蒋林【作者单位】重庆理工大学,重庆 401320;常州东风无级变速器有限公司,江苏常州 213000;常州东风无级变速器有限公司,江苏常州 213000【正文语种】中文【中图分类】S219.032.3拖拉机自动导航技术是实现拖拉机无人驾驶的一个重要发展阶段,也是我国精准农业发展所需技术所在 [1]。
试论拖拉机GPS卫星导航自动驾驶技术的推广应用
试论拖拉机GPS卫星导航自动驾驶技术的推广应用
吴红伟
【期刊名称】《新农村(黑龙江)》
【年(卷),期】2016(000)016
【摘要】GPS在农业机械中的应用极大地提高了农业生产和作业效率.本文简述拖拉机GPS自动驾驶系统的组成、工作原理以及该项技术推广应用时存在的问题,并提出相应的解决办法.
【总页数】1页(P103)
【作者】吴红伟
【作者单位】黑龙江省五大连池市二龙山农场 164131
【正文语种】中文
【相关文献】
1.拖拉机GPS卫星导航自动驾驶技术的实践应用 [J], 王晓刚
2.拖拉机GPS卫星导航自动驾驶技术的应用 [J], 王学荣
3.拖拉机GPS卫星导航自动驾驶技术在昌吉市的应用 [J], 王学荣
4.新疆阿勒泰地区拖拉机GPS卫星导航自动驾驶技术的推广应用 [J], 苏丽
5.新疆阿勒泰地区拖拉机GPS卫星导航自动驾驶技术的推广应用 [J], 苏丽
因版权原因,仅展示原文概要,查看原文内容请购买。
久保田插秧机的GPS导航控制系统设计
久保田插秧机的GPS导航控制系统设计
张智刚;罗锡文;周志艳;臧英
【期刊名称】《农业机械学报》
【年(卷),期】2006(37)7
【摘要】将计算机技术、传感器技术、GPS技术和数据通讯技术等集成和融合,在久保田插秧机上开发了基于DGPS和电子罗盘的导航控制系统.论述了导航控制系统的结构和工作原理,提出了一种利用航向跟踪实现路径跟踪的控制方法.仿真和试验结果表明,该控制方法简单有效,导航控制系统可以控制插秧机按预定的路线行走.速度为0.75 m/s,直线路径跟踪时,平均误差0.04 m,最大误差0.13 m;速度为0.33 m/s,圆曲线路径跟踪时,平均误差0.04 m,最大误差0.087 m.
【总页数】4页(P95-97,82)
【作者】张智刚;罗锡文;周志艳;臧英
【作者单位】华南农业大学工程学院;华南农业大学工程学院;华南农业大学工程学院;华南农业大学工程学院
【正文语种】中文
【中图分类】TP24;S223.92
【相关文献】
1.水稻插秧机导航控制器设计与路径追踪仿真研究 [J], 迟德霞;任文涛;由佳翰;王洋;李萍
2.基于GPS的除草机器人导航控制系统设计及仿真 [J], 陈姗姗;陈树人;韩红阳;陈
刚
3.基于CAN总线的分布式插秧机导航控制系统设计 [J], 胡炼;罗锡文;张智刚;赵祚喜
4.基于IGPS和麦克纳姆轮的AGV导航控制系统设计 [J], 王颜;刘净瑜;李光;张加波;刘星;周欣欣
5.浅析久保田高速插秧机横向传动失效的故障原因 [J], 董红成;张庆华
因版权原因,仅展示原文概要,查看原文内容请购买。
东方红拖拉机自动转向控制系统设计
东方红拖拉机自动转向控制系统设计吴晓鹏;赵祚喜;张智刚;陈斌;胡炼【期刊名称】《农业机械学报》【年(卷),期】2009(040)0z1【摘要】以东方红X804型拖拉机为平台,改造原拖拉机的油路,使用电控比例液压阀,并设计电控单元,组成了自动转向控制系统.简述了油路的改造与电控比例液压阀安装,电控单元的设计,包括单片机(C8051F040)、角度传感器(KMA199)以及CAN 总线网络,实现了SD卡存储系统,实时存储试验过程中的数据.试验结果表明:信号跟踪的最大误差1.1°、平均误差0.5°、平均延时为0.2s.自动转向控制系统具有良好的响应特性,满足转向系统的性能要求.【总页数】5页(P1-5)【作者】吴晓鹏;赵祚喜;张智刚;陈斌;胡炼【作者单位】华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州,510642;华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州,510642;华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州,510642;华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州,510642;华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州,510642【正文语种】中文【中图分类】TP242.3;TP29【相关文献】1.基于东方红-SG250拖拉机的自动转向控制系统设计 [J], 赵建东;安秋;姬长英;田光兆;程同;翟力欣2.基于东风1204拖拉机自动导航转向控制系统设计 [J], 刘雪珂;王斐;蒋林3.东方红拖拉机自动转向控制器设计及试验 [J], 黎永键;赵祚喜;黄培奎;关伟4.不可完全根据维护东方红-75/802型拖拉机的经验来维护东方红-1002型拖拉机[J], 贺吉凡5.东方红-802X2型拖拉机离合器的调整方法与东方红-75型拖拉机不同 [J], 常宝灿;刘书明;郭兰庆因版权原因,仅展示原文概要,查看原文内容请购买。
华南农业大学罗锡文电类硕博士学位论文情况
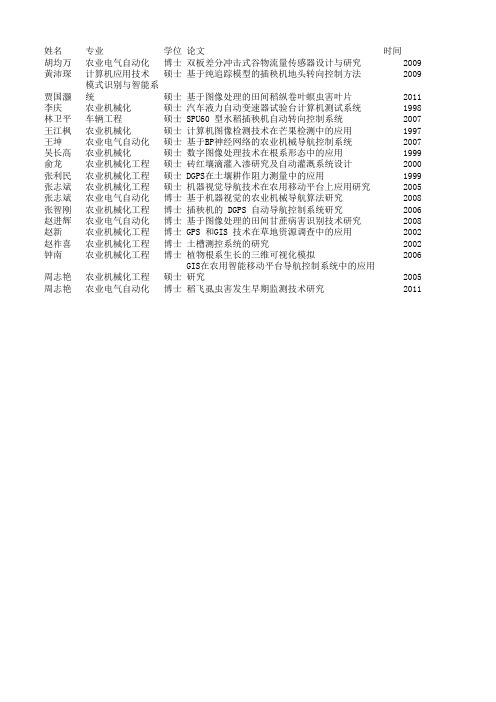
姓名专业学位论文时间
胡均万农业电气自动化博士双板差分冲击式谷物流量传感器设计与研究2009黄沛琛计算机应用技术硕士基于纯追踪模型的插秧机地头转向控制方法2009
贾国灏模式识别与智能系
统硕士基于图像处理的田间稻纵卷叶螟虫害叶片2011
李庆农业机械化硕士汽车液力自动变速器试验台计算机测试系统1998林卫平车辆工程硕士SPU60 型水稻插秧机自动转向控制系统2007王江枫农业机械化硕士计算机图像检测技术在芒果检测中的应用1997王坤农业电气自动化硕士基于BP神经网络的农业机械导航控制系统2007吴长高农业机械化硕士数字图像处理技术在根系形态中的应用1999俞龙农业机械化工程硕士砖红壤滴灌入渗研究及自动灌溉系统设计2000张利民农业机械化工程硕士DGPS在土壤耕作阻力测量中的应用1999张志斌农业机械化工程硕士机器视觉导航技术在农用移动平台上应用研究2005张志斌农业电气自动化博士基于机器视觉的农业机械导航算法研究2008张智刚农业机械化工程博士插秧机的 DGPS 自动导航控制系统研究2006赵进辉农业电气自动化博士基于图像处理的田间甘蔗病害识别技术研究2008赵新农业机械化工程博士GPS 和GIS 技术在草地资源调查中的应用2002赵祚喜农业机械化工程博士土槽测控系统的研究2002钟南农业机械化工程博士植物根系生长的三维可视化模拟2006
周志艳农业机械化工程硕士GIS在农用智能移动平台导航控制系统中的应用
研究2005
周志艳农业电气自动化博士稻飞虱虫害发生早期监测技术研究2011。
四轮转向液压底盘自动驾驶系统设计
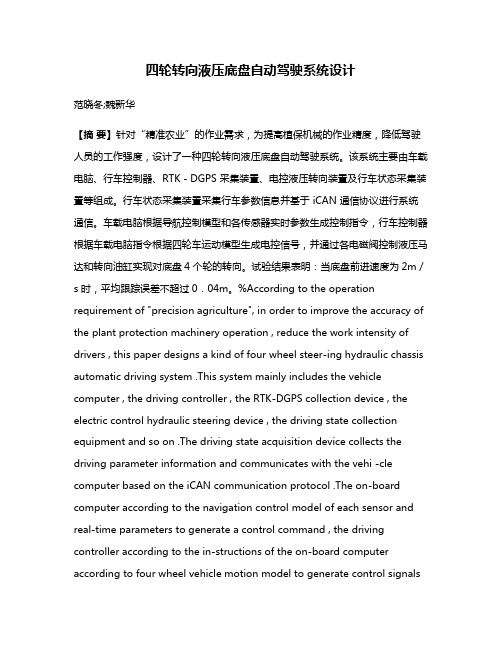
四轮转向液压底盘自动驾驶系统设计范晓冬;魏新华【摘要】针对“精准农业”的作业需求,为提高植保机械的作业精度,降低驾驶人员的工作强度,设计了一种四轮转向液压底盘自动驾驶系统。
该系统主要由车载电脑、行车控制器、RTK-DGPS 采集装置、电控液压转向装置及行车状态采集装置等组成。
行车状态采集装置采集行车参数信息并基于 iCAN 通信协议进行系统通信。
车载电脑根据导航控制模型和各传感器实时参数生成控制指令,行车控制器根据车载电脑指令根据四轮车运动模型生成电控信号,并通过各电磁阀控制液压马达和转向油缸实现对底盘4个轮的转向。
试验结果表明:当底盘前进速度为2m/s 时,平均跟踪误差不超过0.04m。
%According to the operation requirement of "precision agriculture", in order to improve the accuracy of the plant protection machinery operation , reduce the work intensity of drivers , this paper designs a kind of four wheel steer-ing hydraulic chassis automatic driving system .This system mainly includes the vehicle computer , the driving controller , the RTK-DGPS collection device , the electric control hydraulic steering device , the driving state collection equipment and so on .The driving state acquisition device collects the driving parameter information and communicates with the vehi -cle computer based on the iCAN communication protocol .The on-board computer according to the navigation control model of each sensor and real-time parameters to generate a control command , the driving controller according to the in-structions of the on-board computer according to four wheel vehicle motion model to generate control signalsand through the electromagnetic valve control hydraulic motor and steering oil cylinder on the chassis of a four wheel steering control . Test results showed that:when forward speed is 2 m/s, the average tracking error is no more than 0.04m.【期刊名称】《农机化研究》【年(卷),期】2017(039)005【总页数】6页(P253-258)【关键词】四轮转向;液压系统;CAN总线;RTK-DGPS;自动驾驶【作者】范晓冬;魏新华【作者单位】江苏大学现代农业装备与技术教育部重点实验室,江苏镇江212013;江苏大学现代农业装备与技术教育部重点实验室,江苏镇江 212013【正文语种】中文【中图分类】S219.032;S49农业机械智能化、自动化是“精准农业”的发展方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基金项目:国家“863”高技术研究发展计划资助项目(2006AA10A304) ; 广东省科技计划项目( 2007A020300010-5 ) ;广东省自然科学基金项目 (07301499) 作者简介:罗锡文(1945-) ,男,湖南株洲人,教授,博士生导师,主要 从事农业机械化工程、精细农业方面研究。广州 华南农业大学工程学院, 510642。Email: xwluo@
0
引
言
农业机械自动导航技术是现代农业机械装备的重要 支持技术之一。实现农业机械的智能化导航,可以有效 减少驾驶员的劳动强度,提高农田作业质量,具有重要 的理论研究意义和实际应用价值。随着差分 GPS 定位技 术的不断发展,GPS 定位精度不断提高,载波相位差分 GPS ( real time kinematic differential global positioning system, RTK-DGPS )的定位精度甚至可达厘米级,使 DGPS 定位技术在农业机械自动导航系统中得到了广泛 应用[1-3]。 斯坦福大学 O’ Connor 较早将 RTK-DGPS 应用于拖拉 机直线跟踪导航。利用方向偏差、方向偏差变化率、转 向角度、转向角度变化率、跟踪误差等 5 个状态变量建 立了拖拉机运动学方程,设计了最优操纵控制器引导 Deere 7800 型拖拉机进行导航控制实验, 路径跟踪误差的 标准差为 5.27 cm ,平均偏差为-0.22cm[4] 。 Zhang 将 RTK-DGPS 和光纤陀螺(fiber optic gyroscope,FOG)综 合应用于拖拉机作业路线跟踪导航,研究了拖拉机的 2 自由度线性动力学模型,提出了基于预瞄策略的动态路 径搜索算法,用于拖拉机直线或者曲线作业路线的自动
电控液压转向油路由在原有转向油路基础上并联安 装的比例阀(FFV-03-60-C05-01-1901, HNC Inc.)和 O 型 的 三 位 四 通 换 向 电 磁 阀 ( DG4V-5-8CJ-VM-U-C6-20 , VICKERS Inc.)组成。比例阀主要实现流量控制,以达 到控制转向速度快慢的效果,换向电磁阀实现油路方向 的切换控制,以达到控制前轮左右转向的效果。为了系 统油路的安全,在比例阀输入前端安装了一个安全溢流 阀(YF-B-10HZ-S,常州鹏源液压机械有限公司) 。比例 阀、换向阀和溢流阀集成在一个油路块上,构成液压控 制阀单元,如图 3 虚线框部分所示。为实现手动转向和 自动转向的可靠切换,还增加了 3 个同原有油路转换的 手动切换阀。 自动转向控制的原理是:发动机启动后,转向液压 泵开始运转;转向操纵控制器检测拖拉机转向前轮转角 信息, 根据导航控制器由 CAN 总线发出的转向控制指令, 控制液压电磁阀单元(比例阀、换向阀)的开度和方向; 液压油经过电磁阀单元时改变流量和流向,而后进入转
Fig.3
图 3 电控液压转向的闭环控制回路 Closed control loop of electrohydraulic steering
导航传感器采用 Trimble 公司的 5700 型 GPS 接收机 系统,包括 GPS 天线、基准站接收机、移动站接收机和 PDL 数传电台。该系统支持 RTK-DGPS 定位,水平定位 精度可达 1 cm+1 ppm RMS,垂直定位精度可达 2 cm+1 ppm RMS,动态延迟小于 20 ms。 转向轮偏角检测传感器采用日本 KOYO 公司的 TRD– NA1024NW 型绝对值旋转编码器, 分辨率为 10 位, 测试精度为 0.35° 。 1.2 CAN 总线结构 自动导航系统采用 CAN 总线结构。转向操纵控制器 采用 C8051F040 单片机,实现转向轮偏角检测数据采集 和转向控制。导航控制器采用 ATMEL AT91SAM9261 微 处理器,实现 DGPS 定位数据采集、处理和转向控制指 令决策。 2 个控制器均具有 CAN 通讯接口, 便于挂接 CAN 总线。系统总体结构见图 2。 系统总体结构采用 CAN 总线方式,还考虑到了今后
跟踪导航。 田间试验结果表明: 拖拉机前进速度为 3.5 m/s 时,最大跟踪误差小于 0.1 m,均方根误差小于 0.03 m[5]。 Qiu[6] 也 进 行 了 相 关 研 究 , 得 到 了 类 似 的 研 究 结 果 。 Yoshisada 将 RTK-DGPS 和 FOG 应用于水田插秧机的直 线跟踪导航,导航控制器采用基于位置和航向偏差的比 例控制方式。插秧机在正常作业速度条件下(0.7 m/s) , 最大跟踪误差小于 0.12 m,均方根误差小于 0.055 m[7]。 国内庄卫东等人研究了农机直线行走的 DGPS 导航算法, 指出农机直线行走导航的关键是要获得机车当前实际位 置与预定路线之间的距离偏差和方向偏差,提出了一种 偏航距离计算方法和偏左偏右信息的判断方法[8]。 张智刚 等人研究了插秧机的 DGPS 自动导航技术,提出了一种 利用航向跟踪实现路径跟踪的控制算法。利用 RTK-DGPS 进行导航试验的结果表明,直线跟踪时,行 进速度为 0.75 m/s,平均跟踪误差 0.104 m,最大跟踪误 差 0.113 m;圆曲线跟踪时,行进速度为 0.33 m/s,平均 跟踪误差 0.04 m,最大跟踪误差 0.087 m[9]。陈军等人利 用全站仪,应用最优控制理论,对拖拉机自动引导行走 方法进行了研究。实车试验结果表明:拖拉机在倾斜度 小 于 3° 的地面上直线行走时的横向标准偏差小于 0.108 m[10]。吕安涛等人也对拖拉机自动驾驶的最优控制 方法进行了研究[11]。 本文采用 RTK-DGPS 定位技术,研究东方红 X-804 拖拉机的自动导航系统。设计开发了可电控的液压转向 闭环控制回路,并进行了闭环辨识。将拖拉机运动模型 和液压转向控制模型相结合,设计了直线跟踪的 PID 导 航控制器,分析了路径跟踪的稳定性和动态响应特性, 确定了 PID 控制参数。采用跨行地头转向方式,设计了
第 25 卷 第 11 期 2009 年 11 月
农 业 工 程 学 报 Transactions of the CSAE
Vol.25 No.11 Nov. 2009
139
东方红 X-804 拖拉机的 DGPS 自动导航控制系统
罗锡文,张智刚,赵祚喜,陈 斌,胡 炼,吴晓鹏
(华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州 510642) 摘 要:该文在东方红 X-804 拖拉机上开发了基于 RTK-DGPS 的自动导航控制系统。系统主要包括 RTK-DGPS 接收机、 导航控制器、转向操纵控制器、电控液压转向装置和转向轮偏角检测传感器。其中转向操纵控制器、转向轮偏角检测传 感器和电控液压转向装置构成转向轮偏角的闭环控制回路,该回路可根据导航控制器提供的期望转向轮偏角实现偏转角 的随动控制。将拖拉机运动学模型和转向操纵控制模型相结合,建立了拖拉机直线跟踪的导航控制传递函数模型,模型 的输入是横向跟踪误差,输出是期望的转向轮偏角。设计了基于 PID 算法的导航控制器,仿真分析了系统稳定性和动态 响应性能, 确定了 PID 控制参数的较佳取值。 针对东方红 X-804 拖拉机转弯半径大的特点, 采用跨行地头转向控制方式, 提出了具体的控制流程及算法。 田间试验结果表明: 采用所设计的 DGPS 自动导航控制系统, 在拖拉机行进速度为 0.8 m/s 时,直线跟踪的最大误差小于 0.15 m,平均跟踪误差小于 0.03 m,所提出的跨行地头转向控制方法对试验拖拉机具有良 好的适用性。 关键词:自动导航,控制系统,拖拉机,DGPS doi:10.3969/j.issn.1002-6819.2009.11.025 中图分类号:S219.1,TP242 文献标识码:A 文章编号:1002-6819(2009)-11-0139-07 罗锡文,张智刚,赵祚喜,等.东方红X-804拖拉机的DGPS自动导航控制系统[J].农业工程学报,2009,25(11):139-145. Luo Xiwen, Zhang Zhigang, Zhao Zuoxi, et al. Design of DGPS navigation control system for Dongfanghong X-804 tractor[J]. Transactions of the CSAE, 2009, 25(11): 139-145. (in Chinese with English abstract)
技术指标 外型尺寸(长×宽×高)/mm×mm×mm 轴距/mm 前轮轮距/mm 后轮轮距/mm 最小离地间隙/mm 转向圆半径/m 前进速度/(km·h-1) 参数值 4260×2170×2875 2314 1630~1960(可调) 1400~2100(可调) 430 5.3(不单边制动) 1.65~27.2 1. 转向前轮 2. 转向油缸 3. 油管 4. 转向器 5. 方向盘 6. 液压转向泵 7. 油箱 8. 安全阀 9. 比例阀 10. 三位四通换向电磁阀 11. 手动切换阀 12. 转向控制器 13.编码盘
向轮偏器设计
拖拉机运动模型 Ellis[4] 最早提出了一种拖拉机的运动学模型用于导 航控制器设计。这个运动学模型是一个二轮车简化模型, 并假设地面平坦、前进速度恒定、轮胎没有侧偏、拖拉 机没有纵侧向滑移。模型表达式如下 Vx tan( ) L
x Vx cos( )
y Vy sin( )
式中:x, y——当前坐标点; ——航向角;Vx ——拖拉 机纵向前进速度;V y ——拖拉机纵向前进速度;L——拖 拉机轴距; ——转向轮偏角。Connor[4]在此基础上,进 一步假设 和 在直线跟踪时是很小的,通过对方程进 行解耦和线性化,建立了标准形式的拖拉机运动状态方 程如下
140
农业工程学报
2009 年
适合东方红 X-804 拖拉机的地头转向控制算法。最后, 通过田间试验验证了控制系统的精确性和可靠性。
可进一步扩展驾驶操纵的变速控制单元、作业机具升降 控制单元等。