可重构机械系统的设计与控制方法研究
自动称重分选设备及控制系统设计

自动称重分选设备及控制系统设计
1
1 绪论
称重技术自古以来就被人们所重视, 作为一种计量手段, 广泛应用于工农业、 科 研、交通、内外贸易等各个领域,与人民的生活紧密相连。电子自动称秤是电子衡器中 的一种,衡器为国家法定计量器具,是国防建设、国计民生、内外贸易、科学研究不可 缺少的计量设备,衡器产品技术水平的高低,则会直接影响到各行各业的现代化水平的 提高。称重装置不仅是提供重量数据的单体仪表,而 且作为工业控制系统和商业管理 系统的一个组成部分, 推进了工业生产的自动化 和管理的现代化。 先进精密的电子 分选称必将缩短作业时间、改善操作条件、 降低能源和材料的消耗、提高产品质量以 及加强企业管理、改善经营管理。称重 装置的应用已遍及到国民经济各领域,取得了 显著的经济效益。电子秤是称重技 术中的一种新型仪表,广泛应用于各种场合。电子 秤与原有的机械秤相比较有体 积小、重量轻、结构简单、价格低、实用价值强、维护 方便等特点,可在各种环 境工作,重量信号可远传,易于实现重量显示数字化,易于 与计算机联网,实现 生产过程自动化,提高劳动生产率。例如标签秤在超市中的应用 已经是耳闻目睹 的了。一张小小的标签包含着:品名、价格、重量等,一一列表在这 小小的电子 标签上。标签机的使用大大加快了销售速度,也方便了顾客。顶尖条码标 签称有着许多卓越的特点,以太网功能使管理更加方便。因此,称重技术的研究和衡器 工业的发展各国都非常重视。50 年代中期电子技术的渗入推动了衡器制造业的 发展。 60 年代初期出现机电结合式电子衡器以来,随着时代科技的迅猛发展, 微电子学和计 算机等现代电子技术的成就给传统的电子测量与仪器带来了巨大 的冲击和革命性的影 响。经过 40 多年的不断改进与完善,衡器技术也在不断进 步和提高。从世界水平看, 衡器技术已经经历了四个阶段,从传统的全部由机 械元器件组成的机械称到用电子线 路代替部分机械元器件的机电结合秤,再从集成电路式到目前的单片机系统设计的电子 计价秤。 我国电子衡器从机电结合型发展到如今的全电子型和数字智能型。 现在电子 衡器制造技术和其应用开始了新的发展。然而我设计的这台称重设备又和其他的有所不 同,在别的利用传感器的基础上我还同时加上了机械手的配合,通过 PLC 接收称重信号, 从而来控制机械手的动作,这项设计其优点就是秤和机械手的完美组合,通过 PLC 来传 递信号,达到一个我想要的称重分选的效果。
可重构天线

其他方法实现频率可重构
通过改变馈电系统的结构来实现频率 的可重构.
可重构 天线
在馈电系统中加人可变电抗或者开关, 改变可变电抗的偏置电压或者开关状态来改 变加载的电抗值或者馈线长度,进而改变天 线的谐振模式,实现频率的可重构.
其他方法实现频率可重构
应用静电场可以改变铁电体材料的相对介电常数,而应 用静磁场可以改变铁氧体材料的相对磁导率。这些相对介 电常数和磁导率的变化会导致天线有效电长度的改变,从 而改变天线的工作频率
可重构 天线
• 变容二极管可控缝隙.
变容二极管可控缝隙是在缝隙中加载变容二极管来实现的,通过改变变 容二极管的偏置电压使其容值发生改变.
开关可控缝隙
上图所示的槽线矩形环频率可重构天线的工作原理是通过开关器件的通断状态 来改变谐振长度的物理尺寸,从而实现天线频率的可调特性。 图1.1(a)中外环的周长确定了较低的频率,而图1.1(b)中内环的周长则确 定较高的频率。 通过仿真软件可得到 两个工作频率分别为 3.0GHz和8.3GHz。在这两个工作频 率下,天线的辐射方向图比较接近
可重构 天线
开关的不同状态组合所对应的工作频率如表1所示 (ABC表示与B相连接的开关闭合,而其他开关断开), 可以看出:GSM900 , GPS1575 2个频段在3个工作模 式中都没有改变,而通过控制开关状态产生另外3个 频段(GSM1800, PCS1900, UMTS2100 ),实现天线 的频率可重构.文献测量表明,天线的方向图几乎没有 改变,具有稳定的方向性.
理想的方向图可重构天线指的是,在保 持天线其他特性参数不变的情况下对辐 射方向图具有调节能力的天线
方向图可重构天线的设计
可重构 天线
目前,方向图可重构天线具体实现大体有以下几种形式: 1.天线采用多馈电馈电,通过改变各个馈电的相位来改变 天线的辐射方向。 2.采用Yagi阵,在主辐射单元附近的寄生单元中加入开关 或电抗可调器件控制天线的辐射方向。
机械手臂的结构设计
根据结构、功能和应用领域不同,机械手臂可分为工业机器人手臂、服务机器 人手臂、医疗机器人手臂和特种机器人手臂等。
机械手臂应用领域
01
02
03
04
工业制造
机械手臂广泛应用于工业制造 领域,如汽车制造、电子产品
组装、焊接、搬运等。
医疗卫生
机械手臂在医疗卫生领域也有 广泛应用,如手术机器人、康 复机器人、护理机器人等。
设计方法
采用模块化设计思想,将机械手臂分成多个功能模块进行设 计,便于维护和升级;运用现代设计方法,如拓扑优化、有 限元分析等,对关键零部件进行优化设计,提高机械手臂的 性能和寿命。
02
机械手臂概述
机械手臂定义与分类
定义
机械手臂是一种能够模拟人类手臂运动的机械设备,通常由多个关节和执行器 组成,用于执行各种工业、医疗和军事等任务。
SolidWorks Simulation
基于SolidWorks平台的有限元分 析插件,易于上手,适用于中小 型复杂结构分析。
03
ABAQUS
擅长处理非线性问题和复杂接触 问题,广泛应用于机械、土木、 汽车等领域。
仿真结果展示与讨论
应力分布
展示机械手臂在工作过程中的应力分布情况,确保结构安全可靠 。
防护性能不足
可增加防护装置和安全检测功能,提高机械手臂的安全性 能。
未来发展趋势预测
智能化
随着人工智能技术的发展,机械手臂将具备更高的自主决策和协作 能力。
柔性化
为适应多品种、小批量生产需求,机械手臂将具备更高的柔性和可 重构性。
绿色环保
在制造过程中,将更加注重节能减排和环保要求,推动绿色制造技术 的发展。
带传动
适用于中小功率传动,传 动平稳,噪声小,但需要 张紧装置。
新型机械臂的研究与开发
新型机械臂的研究与开发随着科技的不断进步,机械臂技术也在不断地发展和完善,新型机械臂已经成为当前机械制造领域的一个重要发展方向。
新型机械臂以其高精度、高效率、高可靠性等特点,被广泛应用于各个领域,如工业制造、医疗、军事、环境保护等。
本文将从新型机械臂的研究与开发方面进行论述。
一、新型机械臂的发展历程机械臂最早应用于工业制造领域,20世纪70年代初期,机械臂逐渐被引入到汽车制造、电子和半导体工业等一些需要对小型零部件进行高精度加工和组装的领域中。
此后,机械臂的应用范围不断扩大,不断涌现出各种新型机械臂。
包括地面移动机械臂、协同机械臂、人机协同机械臂、可重构机械臂等。
二、新型机械臂的特点1. 高精度:新型机械臂采用先进的传感技术和控制方法,具有高精度的特点,可用于精细加工和组装等工作。
2. 高效率:新型机械臂的运动控制和智能化技术不断完善,可实现高效率的生产和制造。
3. 高可靠性:新型机械臂采用高强度材料和精密加工工艺,同时配备自动诊断和故障检测系统,确保机械臂的高可靠性和长寿命。
三、新型机械臂的应用领域1. 工业制造:新型机械臂在工业制造领域有着广泛的应用,可以用于装配、搬运、打磨、焊接、喷涂等各种工作。
2. 医疗:新型机械臂在医疗领域可用于进行微创手术和其他精细操作。
3. 军事:新型机械臂在军事领域可用于救援、侦察、处理化学品等危险物质等作业。
4. 环境保护:新型机械臂在环境保护领域可用于进行污染治理、清洗等作业。
四、新型机械臂的关键技术1. 传感技术:机械臂的运动轨迹和姿态是通过传感器实时获取并传输给控制系统的,因此传感技术的研究和应用对机械臂的精度和稳定性至关重要。
2. 控制技术:机械臂的运动控制需要对机械臂的电动机等部件进行高精度的控制,因此控制技术的研究和应用也是关键。
3. 智能化技术:人工智能、深度学习等技术的应用,可以使机械臂具有更强的判断和决策能力,提高机械臂的自主化程度。
五、新型机械臂的研究与开发新型机械臂的研究与开发需要多学科的交叉,包括机械、电子、自动化、材料等领域。
机械臂论文

河南理工大学本科毕业设计(论文)说明书摘要用于再现人手的的功能的技术装置称为机械手,机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业机器人的技术水平和应用程度在一定程度上反应了一个国家工业自动化的水平,随着工业自动化的普及和发展,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运, 可以更好地节约能源和提高运输设备或产品的效率,减少其他运输工具的局限,从而满足现代经济发展的要求。
本机械手主要用于光轴的搬运工作,能够配合机床(如锻床、数控机床、组合机床)或装配线等进行圆柱形工件搬运。
本机械手将采用三个自由度,为气压驱动。
本设计首先对机械手的手部、手腕、手臂等各个部分进行设计计算,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;其次,在气动系统的基础上对电气控制系统(PLC)进行了合理设计和布线。
其动作过程包括:下降、夹紧、上升、慢进、快进、慢进、延时、下降、放松、上升、慢退、快退、慢退;其操作方式包括:回原位、手动、单步、单周期、连续;完成搬运机械手搬运工件的最终要求。
关键词: 机械手,搬运,结构,气压,可编程控制器(PLC)。
AbstractAbstractThe technology device used to reproduce the staff function is called a mechanical hand, the mechanical hand is imitate the action of the manpower, to achieve a given program, track and requirements automatically grab, handling or operation of automatic mechanical device. Robots can replace the hands of heavy labor, significantly reduce the labor intensity, improve working conditions, and improve labor productivity and automation level.The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, with the popularity of industrial automation and development, handling the application of mechanical hand gradually popularity, mainly in the automotive, electronic, mechanical processing, food, medicine and other areas of the production line or cargo transport, we can be more good to save energy and improve the transport efficiency of equipment or products, to reduce restrictions on other modes of transportation to meet the requirements of modern economic development.This manipulator is mainly used for metal optic axis handling work, can match with machine tools (such as forging bed, NC machine tools, combination machine tools) or assembly line of weight to realize cylindrical work pieces handling. The robot will use the three degrees of freedom for the pneumatic drive. First, I design and calculate the hand, wrist, arm and various parts of the mechanical hand. Then choose the proper drive method and transmission method, build the mechanical structure of the mechanical hand. Second, design and wire the electrical control system on the base of the pneumatic system of the manipulator. Their course of action should include: decline in clamping increased, slow forward, fast forward, slow progress, the extension of , the drop in, relax, rise, slow back, rewind, slow back; its operation, including: back in situ, manual, single-step, single cycle, continuous; and finally complete the final requirements of the handling robot porter pieces.Keywords: mechanical hand, transport, structure, pneumatic , programmable logic controller (PLC).河南理工大学本科毕业设计(论文)说明书目录摘要 (I)Abstract (II)第一章绪论 (5)1.1 选题背景 (5)1.2 机械手设计目的及意义 (5)1.3 机械手发展历史及现状 (6)1.4 国内外应用及发展趋势 (8)1.5 设计大纲 (9)第二章机械手方案设计及计算 (11)2.1 机械手的设计要求及技术参数 (11)2.1.1机械手的总体方案论证 (11)2.1.2 驱动方式的选择 (11)2.1.3 技术参数 (12)2.2 手部结构设计及计算 (13)2.2.1 手部设计要求 (13)2.2.2 手部选型及计算 (14)2.2.3 手部夹紧力和驱动力计算 (15)2.2.4 气缸的直径确定 (17)2.2.5 缸筒壁厚的设计 (18)2.3 腕部结构设计 (19)2.3.1 腕部设计要求 (19)2.3.2 腕部的总体设计要求如下: (20)2.4 臂部结构设计及计算 (20)2.4.1 臂部设计要求 (20)2.4.2 伸缩手臂的设计 (21)2.4.3 手臂伸缩气缸的尺寸设计 (22)2.4.4 导向装置 (23)2.4.5 平衡装置 (23)2.4.6 手臂升降气缸的尺寸设计与校核 (23)2.5 机身设计及计算 (24)2.5.1 回转机身设计 (25)2.5.2 尺寸设计及校核 (25)第三章气动系统的设计 (28)3.1 驱动方式的选择 (28)3.2 气动原理图 (28)3.2.1 气动控制系统简介: (28)3.2.2 各执行机构的调速 (30)第四章机械手的PLC控制设计 (31)4.1 PLC简介 (31)4.1.1 PLC的发展历史 (31)4.1.2 PLC的结构 (32)4.1.3 PLC系统的其它设备 (33)4.1.4 PLC的分类 (33)目录4.1.5 PLC的特点 (34)4.1.6 PlC的用途 (34)4.2 机械手动作PLC设计 (35)4.2.1 I/O接口简介 (36)4.3PLC设计 (36)4.3.1输入输出设备 (36)4.3.2 选择可编程控制器 (36)4.3.3 PLC的I/O分配如下: (37)4.3.4PLC外围接线图如下: (38)总结 (40)参考文献 (41)致谢......................................... 错误!未定义书签。
机器人复习题及参考答案
机器人学导论二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
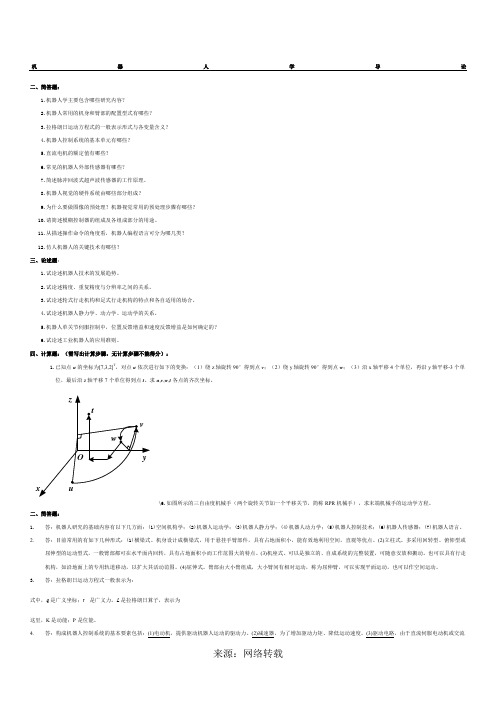
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u,v,w,t各点的齐次坐标。
xyzOuvwt\6.如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称RPR机械手),求末端机械手的运动学方程。
二、简答题:1.答:机器人研究的基础内容有以下几方面:(1)空间机构学;(2)机器人运动学;(3)机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。
2.答:目前常用的有如下几种形式:(1)横梁式。
机身设计成横梁式,用于悬挂手臂部件,具有占地面积小,能有效地利用空间,直观等优点。
(2)立柱式。
多采用回转型、俯仰型或屈伸型的运动型式,一般臂部都可在水平面内回转,具有占地面积小而工作范围大的特点。
可重构混联机械手TriVariant与Tricept的静动态特性预估与比较

( 天津大学机械工程学院 , 天津 30 7 ) 00 2
摘
要: 深入研 究并联机构的静 、 态特性 , 动 对并联机械手 的方案设 计和使 用有重要 意义. 为此 , 助予 结构综合 借
思想和 A S S参数化设计语言 , NY 构造 了两种 可重构五 自由度混联 机械 手模块 Tiai t Ti p 的有 限元模 型 , r r n 与 r et V a c 研 究 了并联构型装备 处于不 同位形 时的整机有限元模型 快速重 构技 术 , 以及机 构 中各种铰链 的精确 建模 方法 , 并 系统分析和 比较 了两种机械手 的静 、 动态特性 . 究结果表明 , 研 当尺度 、 弹性和惯性参数相 同时 , 二者 具有极为相似
tmial n lz d. e r s l h w h tte t o osh v i lrsai n y a c p ro a c rv d d e c l a ay e Th e u t s o t a h wo rb t a e smia tt a d d n mi e r n e p o ie y s c f m
( col f cai l nier g Taj n esy Taj 0 0 2 C i ) Sho o h n a E g ei , i i U i ri , i i 3 07 , hn Me c n n nn v t nn a
Ab ta t I i sg i c n o h e in a d a p ia in o a allma iu ao st td h tt n y a sr c : t s inf a tfrt ed sg n p l t fp rl np ltr osu yt esai a d d n m‘ i c o e c
基于PLC的自动剪板机控制系统设计

基于PLC的自动剪板机控制系统设计摘要随着工业自动化的不断发展,自动控制系统越来越受到人们的关注。
自动剪板机控制系统作为重要的制造业自动化设备,其控制系统设计和优化已成为面临的一个重要课题。
本文基于PLC控制系统,通过对自动剪板机控制系统相关设备进行详细的分析和研究,设计出一种可靠的自动剪板机控制系统,并对其进行实验验证,取得了良好的控制效果。
关键词:PLC;自动剪板机;控制系统设计;优化AbstractWith the continuous development of industrial automation, automatic control systems have been receiving increasing attention from people. As an important manufacturing automation equipment, the control system design and optimization of automatic shearing machine have become an important problem to be addressed. Based on the PLC control system, this paper analyzes and studies the relevant equipment of automatic shearing machine, designs a reliable automatic shearing machine control system, and verifies its control effect through experiments.Keywords: PLC; automatic shearing machine; control system design; optimization1. 引言自动剪板机是一种重要的制造业自动化设备,其控制系统在制造和加工过程中起着至关重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可重构机械系统的设计与控制方法研究
一、引言
现代制造业正迅速发展,对于机械设备的要求也越来越高。
可重构机械系统由
于其灵活可变的特点,正在成为制造业中备受关注的研究方向。
本文旨在探讨可重构机械系统的设计与控制方法,以提高其适应各种生产要求的能力。
二、可重构机械系统的概念与特点
可重构机械系统是指能够通过改变其结构或参数,以适应不同生产任务要求的
机械系统。
其特点包括以下几个方面:
1. 灵活性:可重构机械系统具有良好的适应性和灵活性,可以快速进行结构和
参数调整,以满足不同的生产要求。
2. 可变性:可重构机械系统可以在不同工况下提供不同的性能和功能,具有多
样化的配置选择。
3. 智能化:可重构机械系统通过引入智能控制算法和自主学习能力,可以实现
自动化的结构和参数调整。
三、可重构机械系统的设计方法
可重构机械系统的设计方法主要包括整体设计和局部设计两个层面。
整体设计
是指对于系统整体结构和功能的确定,局部设计是指对于系统各个组件的设计和选择。
1. 整体设计:整体设计考虑的是系统的整体性能和功能要求,包括系统结构和
控制策略的确定。
在设计过程中,应根据生产任务的需求,选择合适的结构和参数,并通过仿真和实验验证,确保系统的性能和鲁棒性。
2. 局部设计:局部设计关注的是系统中各个组件的设计和选择。
在进行局部设
计时,需要考虑组件的相互配合和可替换性,以便在需要调整或替换时能够快速实施。
四、可重构机械系统的控制方法
可重构机械系统的控制方法是实现系统性能调整和参数变化的关键。
1. 模型预测控制:模型预测控制是一种基于系统模型的控制方法,通过预测系
统的行为和性能,实现系统的控制和优化。
在可重构机械系统中,可以根据系统的建模和预测结果,调整系统的结构和参数,以适应不同的工况。
2. 自适应控制:自适应控制是一种根据系统的实时变化调整控制策略的方法。
在可重构机械系统中,可以通过引入自适应控制算法,实现对系统结构和参数的自动调整。
3. 强化学习控制:强化学习控制是一种通过试错和反馈机制,逐步调整系统的
控制策略的方法。
在可重构机械系统中,可以利用强化学习算法,实现系统的自主学习和优化。
五、可重构机械系统的应用案例
可重构机械系统在实际应用中已经取得一定的成果。
下面以一个案例来说明可
重构机械系统的应用。
某汽车生产线采用可重构机械系统,能够根据不同车型的生产需求,自动调整
系统的工艺和参数。
系统通过智能控制算法,实现对生产线各个工序的调度和优化,提高生产效率和质量稳定性。
六、可重构机械系统的挑战与展望
可重构机械系统在设计与控制方法的研究中仍面临一些挑战。
例如,如何实现
系统的高效性能调整和智能化控制,如何提高系统的鲁棒性和安全性。
未来的研究可以从以下几个方面展开:
1. 系统建模与仿真:进一步深入研究可重构机械系统的建模方法,并借助仿真
工具对系统进行性能分析和优化。
2. 智能控制算法:发展更加高效和可靠的智能控制算法,实现系统的自主学习
和优化。
3. 可重构机械系统的工业应用:进一步推进可重构机械系统在制造业中的应用,促进其实际产业化进程。
七、结论
可重构机械系统的设计与控制方法研究是一个具有深度和挑战的课题。
通过合
理的设计和智能化的控制,可重构机械系统能够快速适应不同生产要求,提高生产效率和品质稳定性。
随着研究的不断深入,可重构机械系统的应用前景将更加广阔。