国外旋翼桨毂构型技术综述
MV-22鱼鹰倾转旋翼机
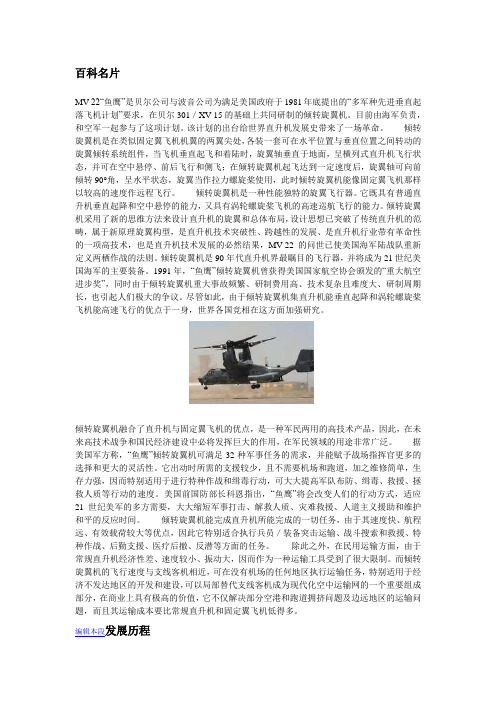
百科名片MV-22“鱼鹰”是贝尔公司与波音公司为满足美国政府于1981年底提出的“多军种先进垂直起落飞机计划”要求,在贝尔301/XV-15的基础上共同研制的倾转旋翼机。
目前由海军负责,和空军一起参与了这项计划。
该计划的出台给世界直升机发展史带来了一场革命。
倾转旋翼机是在类似固定翼飞机机翼的两翼尖处,各装一套可在水平位置与垂直位置之间转动的旋翼倾转系统组件,当飞机垂直起飞和着陆时,旋翼轴垂直于地面,呈横列式直升机飞行状态,并可在空中悬停、前后飞行和侧飞;在倾转旋翼机起飞达到一定速度后,旋翼轴可向前倾转90°角,呈水平状态,旋翼当作拉力螺旋桨使用,此时倾转旋翼机能像固定翼飞机那样以较高的速度作远程飞行。
倾转旋翼机是一种性能独特的旋翼飞行器。
它既具有普通直升机垂直起降和空中悬停的能力,又具有涡轮螺旋桨飞机的高速巡航飞行的能力。
倾转旋翼机采用了新的思维方法来设计直升机的旋翼和总体布局,设计思想已突破了传统直升机的范畴,属于新原理旋翼构型,是直升机技术突破性、跨越性的发展、是直升机行业带有革命性的一项高技术,也是直升机技术发展的必然结果,MV-22的问世已使美国海军陆战队重新定义两栖作战的法则。
倾转旋翼机是90年代直升机界最瞩目的飞行器,并将成为21世纪美国海军的主要装备。
1991年,“鱼鹰”倾转旋翼机曾获得美国国家航空协会颁发的“重大航空进步奖”,同时由于倾转旋翼机重大事故频繁、研制费用高、技术复杂且难度大、研制周期长,也引起人们极大的争议。
尽管如此,由于倾转旋翼机集直升机能垂直起降和涡轮螺旋桨飞机能高速飞行的优点于一身,世界各国竞相在这方面加强研究。
倾转旋翼机融合了直升机与固定翼飞机的优点,是一种军民两用的高技术产品,因此,在未来高技术战争和国民经济建设中必将发挥巨大的作用,在军民领域的用途非常广泛。
据美国军方称,“鱼鹰”倾转旋翼机可满足32种军事任务的需求,并能赋予战场指挥官更多的选择和更大的灵活性。
会飞的“竹蜻蜓”

很多人儿时的记忆里,常常浮现“竹蜻蜓”在空中旋转飞舞的影子,每个人都怀揣着像“竹蜻蜓”一样飞翔的梦。
如今,一群执著梦想、敢于创新的年轻团队,将一只大大的“竹蜻蜒”放飞,也放飞了他们的梦想这只大大的“竹蜻蜓”就是“彩虹”新型无人自转旋翼机。
近日,该机圆满完成了首次全自主飞行试验,在国际上也是大型自转旋翼机完全自主起降及空中飞行的首次试验(题图)。
西班牙人西尔瓦研制的c30自转旋翼机无人自转旋翼机是采用自转旋翼技术实现飞行的飞行器,之所以将其比作“竹蜻蜓”,是由于在飞行过程中,飞机两片大大长长的旋翼看上去很像放大的竹蜻蜓,而且它依靠前飞过程中空气气流持续的气动力使旋翼自转,从而维持旋翼转速并提供全机所需升力,这一飞行原理也同“竹蜻蜓”有着相似之处。
它除了机体顶部的旋翼外,还带有一副水平放置的螺旋桨以提供前进的动力,有的自转旋翼机还装有较小的机翼提供部分升力。
自转旋翼机不是由发动机驱动旋翼来提供升力的,而是在飞行过程中由前方气流吹动旋翼旋转产生升力的。
由于旋翼为自转式,传递到机身上的扭矩很小,因此自转旋翼机无需单旋翼直升机那样的尾桨,而采用类似固定翼飞机的尾翼,以实现稳定飞行。
何方神圣?实际上,有人驾驶的自转旋翼机出现较早,甚至早于直升机。
上世纪20年代,西班牙人西尔瓦为了设计一种不失速且具有低速起飞和降落功能的飞行器,将旋翼升力原理应用于飞行器,经反复试验研制出了带自转旋翼的一种新型飞行器,即自转旋翼机。
他于1934年成功地设计出c30自转旋翼机,并实现了跳跃起飞。
但随着西尔瓦的去世和直升机的兴起,自转旋翼机的发展跌入谷底。
自转旋翼机与直升机相比最大的劣势在于不能悬停,这是其沉寂多年的主要原因。
然而,自转旋翼机所具有的技术优势没有被航空界忘记,特别是该机型具有更高的安全性和经济性,因而在近十几年得到了迅速发展。
技术优势何在?有人驾驶的自转旋翼机在国内外的广泛生产和应用唤起了人们对这一机型的重新认识。
第六章 旋翼无人机空气动力学一
桨毂 旋翼形式是由桨毂形式决定的。它随着材料、工艺和 旋翼理论的发展而发展。到目前为止,已在实践中应 用的旋翼形式有铰接式、跷翼结构
铰接式
铰接式(又称全铰接式)旋 翼桨毂是通过桨毂上设置挥舞铰、 摆振铰和变距铰来实现桨叶的挥 舞、摆振和变距运动。典型的铰 接式桨毂铰的布置顺序( 从里向 外)是由挥舞铰、摆振铰到变距 铰,如图所示。
• 由于陀螺进动效应的存在,最大桨叶角位置相对于需要的最高挥舞位置必须提前90°,最小桨叶角相对 于需要的最低挥舞位置也必须提前90°。
旋翼的工作原理
桨叶的摆振运动
旋翼桨叶作挥舞运动时,桨叶重心距旋转轴的距离不断变化,由理论力学知 道,旋转着的质量对旋转轴有相对运动时会受到哥氏力的作用。挥舞运动引 起的哥氏力是周期交变力,而且一阶挥舞运动会引起二阶的哥氏力。根据实 际例子的计算,发现一片桨叶的哥氏力的最大幅值竟高达桨叶自重的七倍以 上,会在旋转平面内造成很大的交变弯矩,对桨叶结构寿命非常不利。另外, 桨叶在旋转平面内的空气动力阻力也造成根部弯矩,前飞时气动阻力同样随 方位 角变化,不过它所造成的弯矩交变部分比哥氏力的交变弯矩小得多。 通常旋翼无人机桨毂上安装有垂直铰这种垂直铰称为摆振铰,桨叶可以绕摆 振铰作水平面内的前后运动,从而避免因摆振运动所造成的桨叶根部疲劳断 裂。
旋翼无人机的气动结构的组成和旋 翼结构
4.起落装置
旋翼机起落装置的主要作用是吸收在着陆时由于有 垂直速度而带来的能量,减少着陆时撞击引起的过载, 以及保证在整个使用过程中不发生“地面共振”。此 外,起落装置往往还用 来使旋翼机具有在地面运动 的能力,减少滑行时由于地面不平而产生的撞击与颠 簸。
在陆地上使用的旋翼机起落装置有轮式起落架 和滑橇式起落架。
直升机旋翼技术及发展

直升机旋翼技术及发展
一、直升机旋翼技术
直升机旋翼是一种机械装置,用于运载直升机在空中旋转以产生升力
的设备。
它是由外部旋翼与内部旋翼构成的,外部旋翼提供抵抗空气以及
一定程度的升力,内部旋翼提供空速与升力的控制。
一个完整的旋翼主要
由桨叶、桨根、桨顶、桨底和保护组成,这些部分在旋翼的正中央放置。
桨叶是旋翼的核心,它包括多个翼片,这些翼片可以把空气流动转换
成升力,而这些翼片的大小、形状、材料和弯度都是由设计师决定的。
桨
根是把桨叶固定到旋翼上的部件,它可以改变桨叶的形状和位置,以达到
更好的升力或空速效果。
桨顶是支撑桨叶的支架,它的主要作用是阻止桨
叶被风流击打,防止桨叶受损。
桨底是把桨叶固定到桨根上的结构,它的
主要作用是改变桨叶的弯曲度,以改变旋翼的性能。
最后,保护部件可以
有效地避免桨叶和桨根发生损坏,从而保护旋翼的安全性。
二、直升机旋翼的发展
19世纪时,直升机开始发展,但是当时的旋翼技术还处于萌芽阶段,直升机的旋翼只有简单的桨叶,而且无法满足性能要求。
由于直升机的不
断发展,旋翼技术也开始不断进步。
多旋翼飞行器控制系统设计【文献综述】
多旋翼飞行器控制系统设计【文献综述】毕业设计文献综述电气工程与自动化多旋翼飞行器控制系统设计一、材料来源参考文献主要来自于图书馆中文数据库中的CNKI期刊学位会议报纸中的中国期刊全文数据库。
二、飞行器的发展历史以及现状分析在我国,几个世纪的发展,让我们看着各种飞行器像雨后春笋般出现,有飞机、导弹、火箭、卫星、宇宙飞船、航天飞机、空间站、星球探测器等等,近年来,对各种飞行器的研究都十分重视,国内外许多开源项目都能提供相当多的资料。
自从欧洲的莱特兄弟发明飞机到现在,人们都一直在为能够在蓝天中飞翔而激动不已,但是同时又受着起飞、着落所需的场地的困扰。
在莱特兄弟的时代,飞机只要有一片草地或缓坡就可以轻松地起飞和着陆。
在不列颠之战和巴巴罗萨作战中,当时性能最高的“喷火”战斗机也只需要一片平整的草地就可以轻松地起飞,除了那些重型轰炸机,很少有必须要用“正规”的混凝土跑道才能起飞、着陆的。
然而,这些飞机早已经不能和今天的飞机的性能相比,但飞机的对跑道的冲击、飞机的重量和滑跑速度,使对起飞、着陆的具体跑道的要求有增无减,甚至连简易跑道也是高速公路级别的。
现代各种战斗机和其他高性能的军用飞行器对坚固、平整的长跑道的依赖,早已经成为现代各国空军致命的软肋。
为了解决这一困境,从航空先驱者们的时代开始,人们就在孜孜不倦地研究着具有垂直短距起落能力的能够象鸟儿一样腾飞的飞机。
当人们跳出模仿鸟儿拍翅飞行的思维怪圈之后,以贝努力原理为依据的空气动力升力就成为了除气球和火箭外其他所有动力飞行器的重要的基本原理。
所谓“机翼前行”,实际上指的就是机翼和周围空气形成了相对速度,当机翼前行时,上下翼面之间的气流速度差导致上下翼面之间的压力差,这就是所谓的升力。
和机身一起保持前行时,机翼可以造成一定的升力,机身不动但机翼像风车叶一样打转,和周围空气形成相对速度,这样也可以形成升力,这样旋转的“机翼”就形成了旋翼,旋翼产生了的升力就是直升机垂直起落的基本原理。
07旋翼飞行器技术

悬停和垂直飞行
1. 悬停 需用功率: 地面效应
P悬= 停P诱导 P型阻
发动机可用功率
垂直上升
需用功率: P 垂 = 直 P 诱 导 P 型 阻 P 爬升
垂直下降
需用功率: P 下 = 降 P 诱 导 P 型 阻 P 下降 涡环状态
飞机: 升力面:机翼; 操纵面:升降舵、方向舵、襟副翼; 推进器: 螺旋桨、喷气发动机; 气动效率较高;需要跑道;飞行速 度大;升限高;寿命较长;载重大, 经济性好;平稳舒适;操纵容易, 稳定性好;
直升机构造特点
桨穀 桨叶 自动倾斜器 尾桨 机身 起落架 传动系统
拉扭式桨穀构造
1923 年,Juan de la Cierva 在 设计旋翼机时,无意 中解决了直升机的一个重大问题,他发明的挥舞 铰解决了困扰直升机旋翼设计的一个重大问题;
1930 年 10 月,意大利人 Corradino D‘Ascanio 设计 的共轴反转双桨直升机是公认的第一架现代意义 上的直升机,在 18 米高度上前飞了 800 多米的距 离;
CH-47
米-12
一、直升机的发展历史
公元4世纪我国晋代一书《抱朴子》 “竹蜻蜓” 中国陀螺(chinese top)
公元15世纪 意大利 科学家达芬奇 画,最早的直升机设计方案;
本世纪30年代 德国、法国、美国 载人直升机
1923年西班牙人J·西尔瓦发明铰接式旋翼
定翼飞机
腾空而起(鸟)
莱特兄弟发明飞机; 需要跑道(草地、缓坡) “正规”的混凝土跑道
起飞 、着陆; 飞机的滑跑速度、重量
和对跑道的冲击, 要求 有增无减; 连简易跑道也是高速公 路等级的。 现代战斗机和其他高性 能军用飞机对平整、坚 固的长跑道的需求增加
小型旋翼无人机技术综述,优云UBOX代飞

⼩型旋翼⽆⼈机技术综述,优云UBOX代飞⼩型旋翼⽆⼈机技术综述,优云UBOX代飞1.1 ⼩型旋翼⽆⼈机简介⼩型旋翼⽆⼈机是⼀种具有旋翼结构,由⽆线电遥控的微机电系统集成的⼩型不载⼈飞⾏器。
⼩型旋翼⽆⼈机能够在飞⾏过程中实现垂直起降、⾃由悬停,具备⾃主飞⾏和着陆能⼒。
⼩型旋翼⽆⼈机根据旋翼的数量,分为单旋翼⽆⼈机和多旋翼⽆⼈机。
单旋翼⽆⼈机的结构类似于直升机,其特点是续航较为持久。
⽽多旋翼⽆⼈机⼜分为三旋翼、四旋翼、六旋翼、⼋旋翼等,相对于单旋翼,多旋翼⽆⼈机更为灵活稳定,载重能⼒更强,操作相对简单,所以得到了更加⼴泛的应⽤。
通过搭载不同的设备,⼩型旋翼⽆⼈机可实现在各⾏业中的多种应⽤:搭载相机,可⽤于航空拍摄、电路巡线、⾼空监控、电影拍摄等;搭载农药等农业设备,可⽤于农业植保;搭载测绘仪器,可⽤于地理勘测、地图绘制等;搭载救援物资,可⽤于⼈道主义救援及物资运送;搭载包裹和信件,可实现精准的⽆⼈快递送货(民航局⽆⼈机云执照到期免试换证,优云UBOX代飞100⼩时)。
“唯(维、惟)”是句⾸,句中语⽓词。
[4]210如果⽤在判断句中,则帮助表⽰判断。
[4]210-211上博楚简三篇中“唯(维、惟)”皆为⽤于句⾸、句中的语⽓词。
共14例。
如:1.2 ⼩型旋翼⽆⼈机的发展和现状旋翼式飞机最早出现于20世纪初期,但在当时并没有受到⼈们的重视,只是在军事上有⼩规模的应⽤⽽已。
在20世纪90年代后,随着微机电系统的发展逐渐成熟,⼩型⾃动控制器成为现实,但由于单⽚机的运算速度有限,直到2005年,稳定的⼩型旋翼⽆⼈机才被正式开发出来。
随后,⼩型旋翼⽆⼈机的开始进⼊⼈们的⽣活,随着应⽤领域的拓宽,⼩型旋翼⽆⼈机的发展在2013年进⼊爆发期,国内外的⼀⼤批创业公司和投资者疯狂进⼊,市场规模越来越⼤。
典型的MS/RS主要由⾼密度存储货架、提升机、多层穿梭车、轨道、控制系统和仓储管理系统(Warehouse Management System,WMS)构成。
多旋翼无人机的发展历程及构型分析
QU多旋翼无人机的发展历程及构型分析王宇恒摘要四旋翼无人机是一种可垂直起降,具有多旋翼结构的遥控或自主飞行器叫四旋翼无人机体积小、重量轻,便于携带,由于其可以垂直起降,对飞行场地的要求也大大降低,甚至可以在室内等狭小的空间飞行.除此之外,四旋翼无人机还有成本低、噪音小、安全性高、机动性强等优点.文章主要介绍了多旋翼无人机的发展历程,并对目前常见飞行器的优缺点进行了分析,从而总结出多旋翼飞行器的特点,最后对多旋翼飞行器的操控系统和构型进行了分析总结.关键词多旋翼无人机;发展历程;构型分析中图分类号V27文献标识码A文章编号1674-6708(2019)247-0142-03无人驾驶的飞机简称无人机(UAV),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机^如果从机体结构方向分类,可以把无人机分为固定翼和旋翼无人机,固定翼无人机一般机体较大,机械结构比较复杂,对无人机操作者有很高的要求。
在旋翼无人机中,可以大致分为单旋翼无人机和多旋翼无人机。
单旋翼无人机就是我们平时所说的直升机,而多旋翼无人机则包括四旋翼、六旋翼、八旋翼甚至更多旋翼的飞机。
其中,四旋翼无人机是目前结构最为简单、应用最为广泛的旋翼无人机。
四旋翼无人机是一种可垂直起降,具有多旋翼结构的遥控或自主飞行器它的机械结构非常简单,机身仅仅是由一个十字形机架和四个电机构成。
四个电机给予无人机向上的升力,分别调整四个电机的转速就可以控制飞行器的飞行姿态。
四旋翼无人机体积小、重量轻,便于携带,由于其可以垂直起降,对飞行场地的要求也大大降低,甚至可以在室内等狭小的空间飞行。
除此之外,四旋翼无人机还有成本低、噪音小、安全性高、机动性强等优点。
正是由于四旋翼无人机的这些优点,近些年来其受到了广泛的关注。
比如无人机航拍、无人机快递、电路巡检、农药喷洒、军事侦察,等等。
可以说,四旋翼无人机正在发展成为集军用、商用、民用多位一体的无人驾驶工具。
1发展历程多旋翼飞行器的发展历史悠久,在飞机诞生后不久便有了早期的设计与构型W o1907年法国Breguet兄弟在教授C.Richet的指导下,进行了旋翼式直升机的飞行试验。