单片机tb6600驱动步进电机正反转加减速应用案例
tb6600闭环控制程序设计

tb6600闭环控制程序设计TB6600 是一款高性能的步进电机驱动器,具有闭环控制功能,可以实现高精度的位置控制和速度控制。
下面是一个基于 TB6600 的闭环控制程序设计示例:```c#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <string.h>#include <fcntl.h>#include <termios.h>#include <math.h>// 定义串口通信端口号和波特率#define SERIAL_PORT "/dev/ttyUSB0"#define BAUD_RATE 115200// 定义 TB6600 控制命令#define CMD_RESET 0x06#define CMD_RUN 0x0F#define CMD_STOP 0x10#define CMD_JOG 0x11#define CMD_GOTO 0x12#define CMD_SPEED 0x13#define CMD_HOME 0x14#define CMD pwd反馈 0x1A// 定义电机参数#define MOTOR1stepsPerRevolution 200 // 电机每转步数#define MOTOR1current 0.5 // 电机电流(A)#define MOTOR2stepsPerRevolution 200#define MOTOR2current 0.5// 定义闭环控制参数#define POSITION_ERROR_THRESHOLD 10 // 位置误差阈值(脉冲)#define SPEED_ERROR_THRESHOLD 5 // 速度误差阈值(%)#define MAX_SPEED 1000 // 最大速度(RPM)// 定义控制周期(ms)#define CONTROL_PERIOD 10// 定义电机状态结构体typedef struct {int position; // 电机位置(脉冲)int speed; // 电机速度(RPM)int error; // 位置误差(脉冲)int targetPosition; // 目标位置(脉冲)} MotorStatus;// 定义 TB6600 命令结构体typedef struct {unsigned char command;unsigned char data[4];} TB6600Command;// 初始化串口void initSerial() {// 打开串口设备int fd = open(SERIAL_PORT, O_RDWR | O_NOCTTY | O_NONBLOCK); if (fd < 0) {perror("Failed to open serial port");exit(1);}// 设置串口通信参数struct termios options;tcgetattr(fd, &options);options.c_cflag = BAUD_RATE | CS8 | CLOCAL | CREAD;options.c_iflag = IGNPAR;options.c_oflag = 0;options.c_lflag = 0;tcflush(fd, TCIFLUSH);tcsetattr(fd, TCSANOW, &options);// 发送复位命令TB6600Command command = {CMD_RESET, {0}};write(fd, &command, sizeof(command));usleep(1000);}// 发送 TB6600 命令void sendCommand(TB6600Command command) {write(fd, &command, sizeof(command));}// 读取 TB6600 反馈数据void readFeedback(TB6600Command *command) {read(fd, command, sizeof(TB6600Command));}// 计算电机位置和速度void calculateMotorStatus(MotorStatus *motorStatus) {int position = motorStatus->position + (int)(motorStatus->speed * CONTROL_PERIOD / 60);motorStatus->position = position;motorStatus->speed = (int)(position - motorStatus->position) * 60 / CONTROL_PERIOD;}// 闭环控制void closedLoopControl(MotorStatus *motor1Status, MotorStatus *motor2Status) {// 计算位置误差int error = abs(motor1Status->position - motor2Status->position); // 根据误差调整电机速度if (error > POSITION_ERROR_THRESHOLD) {if (motor1Status->speed > -MAX_SPEED) {motor1Status->speed -= 5;} else {motor1Status->speed = -MAX_SPEED;}if (motor2Status->speed < MAX_SPEED) {motor2Status->speed += 5;} else {motor2Status->speed = MAX_SPEED;}} else if (error < -POSITION_ERROR_THRESHOLD) {if (motor1Status->speed < MAX_SPEED) {motor1Status->speed += 5;} else {motor1Status->speed = MAX_SPEED;}if (motor2Status->speed > -MAX_SPEED) {motor2Status->speed -= 5;} else {motor2Status->speed = -MAX_SPEED;}} else {if (motor1Status->speed > 0) {motor1Status->speed -= 2;} else if (motor1Status->speed < 0) {motor1Status->speed += 2;}if (motor2Status->speed > 0) {motor2Status->speed -= 2;} else if (motor2Status->speed < 0) {motor2Status->speed += 2;}}// 限制电机速度if (motor1Status->speed > MAX_SPEED) {motor1Status->speed = MAX_SPEED;} else if (motor1Status->speed < -MAX_SPEED) { motor1Status->speed = -MAX_SPEED;}if (motor2Status->speed > MAX_SPEED) {motor2Status->speed = MAX_SPEED;} else if (motor2Status->speed < -MAX_SPEED) { motor2Status->speed = -MAX_SPEED;}}// 主函数int main() {MotorStatus motor1Status = {0, 0, 0, 0};MotorStatus motor2Status = {0, 0, 0, 0};// 初始化串口initSerial();// 发送运行命令sendCommand({CMD_RUN, {0}});// 进入主循环while (1) {// 读取反馈数据readFeedback(&command);calculateMotorStatus(&motor1Status);calculateMotorStatus(&motor2Status);// 闭环控制closedLoopControl(&motor1Status, &motor2Status);// 发送速度命令TB6600Command command = {CMD_SPEED, {motor1Status.speed, motor2Status.speed}};sendCommand(command);// 打印电机状态printf("Motor 1 position: %d, speed: %d\r\n", motor1Status.position, motor1Status.speed);printf("Motor 2 position: %d, speed: %d\r\n", motor2Status.position, motor2Status.speed);// 等待控制周期usleep(CONTROL_PERIOD * 1000);}// 发送停止命令sendCommand({CMD_STOP, {0}});// 关闭串口close(fd);return 0;}```在上面的代码中,我们首先定义了串口通信端口号和波特率,并初始化了串口。
c语言电动机正转反转程序,步进电机正反转和加速减速c源程序

c语⾔电动机正转反转程序,步进电机正反转和加速减速c源程序这是⼀个群⾥朋友发给我的步进电机实现正转反转和加速减速的单⽚机c语⾔源程序,这⾥给⼤家共享下,有需要的朋友直接复制到keil⾥编译就可以了,程序已测试成功。
/*****************************************单4拍正转 zheng[]={0x01,0x08,0x04,0x02}单4拍反转 fang[]={0x01,0x02,0x04,0x08}双4拍正转 zheng[]={0x09,0x0c,0x06,0x03}双4拍反转 fang[]={0x03,0x06,0x0c,0x09}单双8拍正转 zheng[]={0x01,0x09,0x08,0x0c,0x04,0x06,0x02,0x03}单双8拍反转 fang[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}*****************************************/#include"reg51.h"#include"intrins.h"#define uchar unsigned char#define uint unsigned intbit front_move,back_move;uchar jzaj(void); //单4拍正转 zheng[]={0x01,0x08,0x04,0x02}; 单4拍反转 fang[]={0x01,0x02,0x04,0x08};void ajcl(uchar jz);void delay(uchar del);uchar code zheng[]={0x01,0x09,0x08,0x0c,0x04,0x06,0x02,0x03};uchar code fang[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09};void timer0() interrupt 1{static uchar jz;TH0=0xfc;TL0=0x18;jz=jzaj();if(jz)ajcl(jz);}//步进电机正反转和加速减速程序void main(){uchar count=0;TMOD=0x01;TH0=0xFC;TL0=0x18;TR0=1;ET0=1;EA=1;while(1){if(front_move){P2=zheng[count];delay(100);count++;if(count==8) count=0;}if(back_move){P2=fang[count];delay(100);count++;if(count==8) count=0;}}}uchar jzaj(void){uchar hz,lz;P1=0xf0; //置所有⾏为低电平,⾏扫描,列线输⼊(此时)if((P1&0xf0)!=0xf0) //判断是否有有键按下(读取列的真实状态,若第4列有键按下则P1的值会变成0111 0000),有往下执⾏{delay(10); //延时去抖动(10ms)if((P1&0xf0)!=0xf0) //再次判断列中是否是⼲扰信号,不是则向下执⾏{hz=0xfe; //逐⾏扫描初值(即先扫描第1⾏)while((hz&0x10)!=0) //⾏扫描完成时(即4⾏已经全部扫描完成)sccode为1110 1111 停⽌while程序{P1=hz; //输出⾏扫描码if ((P1&hz)!=hz) //***(P2&0xf0)!=0xf0***也可这样 本⾏有键按下(即P1(真实的状态)的⾼四位不全为1){lz=(P1&0xf0)|0x0f; //列while((P1&0xf0)!=0xf0);return((~hz)|(~lz)); //返回⾏和列break; //有按键返回 提前退出循环}else //所扫描的⾏没有键按下,则扫描下⼀⾏,直到4⾏都扫描,此时sccode值为1110 1111 退出while程序hz=_crol_(hz,1);//⾏扫描码左移⼀位}}}elsereturn 0; //⽆键按下,返回0}void ajcl(uchar jz){if(jz==0x11){back_move=0;front_move=1;}if(jz==0x21){front_move=0;back_move=1;}if(jz==0x41){P2=0x00;front_move=0;back_move=0;}}void delay(uchar del) {uchar i;for(;del>0;del--)for(i=0;i<125;i++) {;}}。
TB6600FG__步进电机驱动IC(中文)
6-1. 电流波形与混合衰减模式的设置
PWM 运行的周期等于五个 OSCM 周期。 快速衰减模式的比值 40%始终固定不变。
译文
TB6600FG
本资料是为了参考的目的由原始文档翻译而来。 使用本资料时,请务必确认原始文档关联的最新 信息,并遵守其相关指示。
原本:”TB6600FG” 2014-03-03 翻译日:2014-04-10
译文
TOSHIBA BiCD 单晶硅集成电路
TB6600FG
PWM 斩波型双极 步进电机驱动 IC
10,11 OUT2A
13,14 NFA
预 -驱动
H-桥 驱动器 B
OUT1B 6,7
1,64 OUT2B
NFB 3,4
47
45
20
8
TQ
SGND
PGNDA PGNDB
Vref 的设置
输入 TQ L H
电压比
30% 100%
4
2014-03-03
译文
TB6600FG
功能描述 1. 励磁设置
利用 M1,M2 与 M3 输入,可以下八种模式中选择励磁模式。在马达运行期间,在 M1, M2, 或 M3 输入改变时, 新励磁模式可从初始模式启动。在这种情况下,输出电流波形不能再继续。
衰减模式的效应?增大电流正弦波?减小电流假若因电流衰减速度较快电流在短时间内即被减小至预定值?减小电流假若因电流衰减速度缓慢需花费较长时间才能降低电流在混合衰减与快速衰减模式期间如果预定电流电平小于rnf电流监控点时的输出电流则充电模式在下一个斩波循环中将消失虽然在实际操作中电流控制模式被暂时切换到充电模式已进行电流传感且电流被控制在慢速与快速衰减模式在mdt点将模式从慢速衰减模式切换到快速衰减模式
tb6600闭环控制程序设计 -回复
tb6600闭环控制程序设计-回复tb6600闭环控制程序设计是指通过使用TB6600步进电机驱动器来实现闭环控制系统的设计和编程。
广泛应用于自动化设备、机械加工和机器人领域。
本文将分步回答关于tb6600闭环控制程序设计的问题。
第一步:理解步进电机和tb6600闭环控制系统的基本原理步进电机是一种电动机,能够将电能转化为机械能。
通过对电流的不断变化控制转子的位置,从而实现步进电机的运动。
tb6600闭环控制系统是基于步进电机的,通过对步进电机进行闭环控制,可以精确控制电机的位置和运动。
第二步:了解tb6600步进电机驱动器的特点和功能tb6600步进电机驱动器是一种高性能的驱动器,具有以下特点和功能:1. 大电流输出:可以输出高电流,适用于大型步进电机或负载较大的应用。
2. 宽电压输入范围:可以适应不同的电源电压。
3. 完善的保护功能:具有过流、过热等保护功能,可以确保电机和驱动器的安全运行。
4. 支持多种控制方式:可以通过外部信号、直接输入脉冲等方式对电机进行控制。
5. 支持闭环控制:可与编码器或位置传感器结合,实现闭环控制和位置反馈。
第三步:了解tb6600闭环控制程序设计的基本流程tb6600闭环控制程序设计主要包括以下几个步骤:1. 传感器接口设置:根据系统需要,设置编码器或位置传感器与驱动器之间的接口。
2. 运动控制参数初始化:设置步进电机的运动参数,如速度、加速度、步距角等。
3. 位置反馈融合:将编码器或位置传感器的反馈信号与设定的运动目标进行比较,计算出误差。
4. PI控制器设计与调试:根据误差信号,设计PI控制器来控制电机的运动,并进行调试。
5. 电机驱动信号输出:根据PI控制器的输出信号,生成驱动电机的脉冲信号并输出给tb6600驱动器。
6. 状态监控与报警:设计监控系统,实时监测电机和控制系统的状态,并设置报警机制以确保工作的稳定性和安全性。
第四步:编写tb6600闭环控制程序代码在编写tb6600闭环控制程序代码之前,需要根据系统的具体需求选择合适的编程语言和开发环境。
c语言实现单片机控制步进电机加减速源程序
C 语言实现单片机控制步进电机加减速源程序1. 引言在现代工业控制系统中,步进电机作为一种常见的执行元件,广泛应用于各种自动化设备中。
而作为一种常见的嵌入式软件开发语言,C 语言在单片机控制步进电机的加减速过程中具有重要的作用。
本文将从单片机控制步进电机的加减速原理入手,结合 C 语言的编程技巧,介绍如何实现单片机控制步进电机的加减速源程序。
2. 单片机控制步进电机的加减速原理步进电机是一种能够精确控制角度的电机,它通过控制每个步骤的脉冲数来实现旋转。
在单片机控制步进电机的加减速过程中,需要考虑步进电机的加速阶段、匀速阶段和减速阶段。
在加速阶段,需要逐渐增加脉冲的频率,使步进电机的转速逐渐增加;在匀速阶段,需要保持恒定的脉冲频率,使步进电机以匀速旋转;在减速阶段,需要逐渐减小脉冲的频率,使步进电机的转速逐渐减小。
这一过程需要通过单片机的定时器和输出控制来实现。
3. C 语言实现步进电机加减速的源程序在 C 语言中,可以通过操作单片机的 GPIO 来控制步进电机的旋转。
在编写源程序时,需要使用单片机的定时器模块来生成脉冲信号,以控制步进电机的旋转角度和速度。
以下是一个简单的 C 语言源程序,用于实现步进电机的加减速控制:```c#include <reg52.h>void main() {// 初始化定时器// 设置脉冲频率,控制步进电机的加减速过程// 控制步进电机的方向// 控制步进电机的启停}```4. 总结与回顾通过本文的介绍,我们了解了单片机控制步进电机的加减速原理和 C 语言实现步进电机加减速源程序的基本思路。
掌握这些知识之后,我们可以更灵活地应用在实际的嵌入式系统开发中。
在实际项目中,我们还可以根据具体的步进电机型号和控制要求,进一步优化 C 语言源程序,实现更加精准和稳定的步进电机控制。
希望本文能为读者在单片机控制步进电机方面的学习和应用提供一定的帮助。
5. 个人观点与理解在我看来,掌握 C 语言实现单片机控制步进电机加减速源程序的技术是非常重要的。
单片机(微机)原理课程设计 步进电机正反转 2秒内加减速程序

30转每分钟正转ORG 0000H;起始地址LJMP MAIN;长跳转到mainORG 001BH;定时器1中断入口LJMP ZD;跳转到中断指令ORG 002FH;随便给一个数MAIN: MOV SP,#6FH;给堆栈赋地址MOV SCON,#00H;串口工作于方式0MOV TMOD,#15H;定时器1工作于方式1,计数器0工作于方式1MOV TH0,#00H;计数器的高8位为零MOV TL0,#00H;计数器的低8位为零MOV TH1,#3CH;即十位数的60MOV TL1,#0B0H;即十位数的176,定时器1赋初值,3CB0H的值为15536,65536-15536=50000,一个机器周期为1us,十六进制为3CB0;定时50ms,计数器0计数MOV R7,#20;循环计数20次共定时1sMOV P1,#00H;以正传为例MOV 30H,#01HMOV 31H,#02HMOV 32H,#04HMOV 33H,#08HMOV 34H,#08HMOV 35H,#04HMOV 36H,#02HMOV 37H,#01HSETB EA;允许中断SETB ET1;允许定时器/计数器1中断SETB TR1;启动定时器1SETB TR0;启动计数器0START: MOV R0,#30HMOV R6,#4LOOP1: MOV A,@R0MOV P1,ALCALL DELAYINC R0DJNZ R6,LOOP1SJMP STARTZD: MOV TH1,#3CHMOV TL1,#0B0HDJNZ R7,HHMOV A,TL0MOV TL0,#00HMOV B,#5MUL ABMOV B,#3DIV AB;计算转速,存于A中LCALL BCDLCALL DISPLAYMOV R7,#20HH: RETIDELAY: MOV R5,#50;150000/(50*100)=30r/minDE1: MOV R4,#100DE2: DJNZ R4,DE2DJNZ R5,DE1RETBCD: MOV B,#100DIV ABMOV 78H,AMOV A,#10XCH A,BDIV ABMOV 79H,AMOV 7AH,BRETDISPLAY:MOV R3,#3MOV R1,#7AHMOV DPTR,#TABLELOOP3: MOV A,@R1MOVC A,@A+DPTRMOV SBUF,ADEC R1LOOP4: JNB TI,LOOP4CLR TIDJNZ R3,LOOP3RETTABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH 30转每分钟反转反转只需把START子程序中第一句话的#30H改为#34H即可2秒内加减速ORG 0000H;起始地址LJMP MAIN;长跳转到mainORG 001BH;定时器1中断入口LJMP ZD;跳转到中断指令ORG 002FH;随便给一个数MAIN: MOV SP,#6FH;给堆栈赋地址MOV R2,#2MOV SCON,#00H;串口工作于方式0MOV TMOD,#15H;定时器1工作于方式1,计数器0工作于方式1MOV TH0,#00H;计数器的高8位为零MOV TL0,#00H;计数器的低8位为零MOV TH1,#3CH;即十位数的60MOV TL1,#0B0H;即十位数的176,定时器1赋初值,3CB0H的值为15536,65536-15536=50000,一个机器周期为1us,十六进制为3CB0;定时50ms,计数器0计数MOV R7,#20;循环计数20次共定时1sMOV P1,#00H;以正传为例MOV 30H,#01HMOV 31H,#02HMOV 32H,#04HMOV 33H,#08HMOV 34H,#08HMOV 35H,#04HMOV 36H,#02HMOV 37H,#01HSETB EA;允许中断SETB ET1;允许定时器/计数器1中断SETB TR1;启动定时器1SETB TR0;启动计数器0START: MOV R0,#30HMOV R6,#4LOOP1: MOV A,@R0MOV P1,ALCALL DELAYINC R0DJNZ R6,LOOP1SJMP STARTZD: MOV TH1,#3CHMOV TL1,#0B0HDJNZ R7,HHMOV A,TL0MOV TL0,#00HMOV B,#5MUL ABMOV B,#3DIV AB;计算转速,存于A中LCALL BCDLCALL DISPLAYMOV R7,#20DJNZ R2,HHMOV R2,#1HH: RETIDELAY: MOV R5,#200MOV A,#2SUBB A,R2MOV B,#180MUL ABMOV R5,AMOV A,#200SUBB A,R5MOV R5,ADE1: MOV R4,#100DE2: DJNZ R4,DE2DJNZ R5,DE1RETBCD: MOV B,#100DIV ABMOV 78H,AMOV A,#10XCH A,BDIV ABMOV 79H,AMOV 7AH,BRETDISPLAY:MOV R3,#3MOV R1,#7AHMOV DPTR,#TABLELOOP3: MOV A,@R1MOVC A,@A+DPTRMOV SBUF,ADEC R1LOOP4: JNB TI,LOOP4CLR TIDJNZ R3,LOOP3RETTABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH。
51单片机实现三相六拍的步进电机控制(正反转、加减速、挡位显示)

51单片机实现三相六拍的步进电机控制(正反转、加减速、挡位显示)自己写的,不规范还望包含,keil和protues文件单片机源程序如下:1.#include <reg52.h>2.3.#define uchar unsigned char4.#define uint unsigned int5.uint speed = 100; //初始转速6.uint max = 200; //最慢转速7.uint min = 20; //最快转速8.9.sbit swich = P2^0; //总开关10.sbit dir = P2^1; //电机旋转方向11.sbit le1=P2^6;12.sbit le2=P2^7;13.sbit speedadd=P3^2;14.sbit speedsub=P3^3;15.16.unsigned char uca_MotorStep[]={0x01,0x03,0x02,0x06, 0x04,0x0C,0x08,0x09}; //励磁电流数组。
17.18.19.uchar leddata[]={20.21.0x3F, //"0"22.0x06, //"1"23.0x5B, //"2"24.0x4F, //"3"25.0x66, //"4"26.0x6D, //"5"27.0x7D, //"6"28.0x07, //"7"29.0x7F, //"8"30.0x6F, //"9"31.0x40, //"-"32.0x00, //熄灭33.};34.35.36.void delay1ms(void) //误差 0us37.{38.unsigned char a,b,c;39.for(c=1;c>0;c--)40.for(b=142;b>0;b--)41.for(a=2;a>0;a--);42.}43.44.void delay(uint x ) //多功能毫秒延时45.{46.uint i;47.for(i=0;i<x;i++)48.{49.delay1ms();50.}51.}52.53.54.55.void display(void)56.{57.if(swich==1)58.{59.P0= leddata[11];60.delay(1);61.le2=1;62.le1=1;63.delay(1);64.le2=0;65.le1=0;66.67.}68.else69.{70.if(dir==1)71.{72.P0= leddata[11];73.delay(1);74.le2=1;75.delay(1);76.le2=0;77.}78.else79.{80.P0 =leddata[10];81.delay(1);82.le2=1;83.delay(1);84.le2=0;85.}86.87.P0=leddata[9-(speed-20)/20];88.delay(30);89.le1=1;90.delay(5);91.le1=0;92.93.}94.}95.96.97.void Init_INT0()98.{99.EX0=1; //开启外部中断 0100.IT0=1; //设置成低电平触发,1为下降沿触发101.EX1=1; //开启外部中断 1102.IT1=1; //设置成低电平触发,1为下降沿触发103.EA=1; //开启总中断104.}105.106.void Interrupt0_handler() interrupt 0107.{108.EA=0; //首先关闭总中断,以消除按键出现的抖动所产生的干扰109.delay(20); //同样是为了消除抖动而产生新的中断110.if(speed>min)111.{speed=speed-20;} //限制最快转速112.else113.{speed=min;}114.while(speedadd==0);115.EA=1; //恢复中断116.}117.118.119.void Interrupt1_handler() interrupt 2120.{121.EA=0; //首先关闭总中断,以消除按键出现的抖动所产生的干扰122.delay(20); //同样是为了消除抖动而产生新的中断123.if(speed<max)124.{speed=speed+20;}125.else126.{speed=max;} //限制最慢转速127.while(speedsub==0);128.EA=1; //恢复中断130.131.void main()132.{133.int i; //初始化134.dir=1;135.le1=0;136.le2=0;137.138.139.start:140.if(swich==0)141.{Init_INT0();} //总开关开启,初始化中断,开始转动142.else143.{display(); goto start; }144.145.146.if(dir==1)147.seq:148.{149.while(1)150.{151.display();152.for (i=0; i<8; i++)153.{154.P1 = uca_MotorStep[i]; //取数据155.delay(speed); //调节转速156.}157.if(dir==0) //是否换向159.delay(5); // 换向延时160.goto oppo; //换向161.}162.if(swich==1) //总开关运行中关闭163.goto start; //等待开启164.165.}166.167.}168.else169.oppo:。
TB6600 TB6560升级版板式驱动器说明
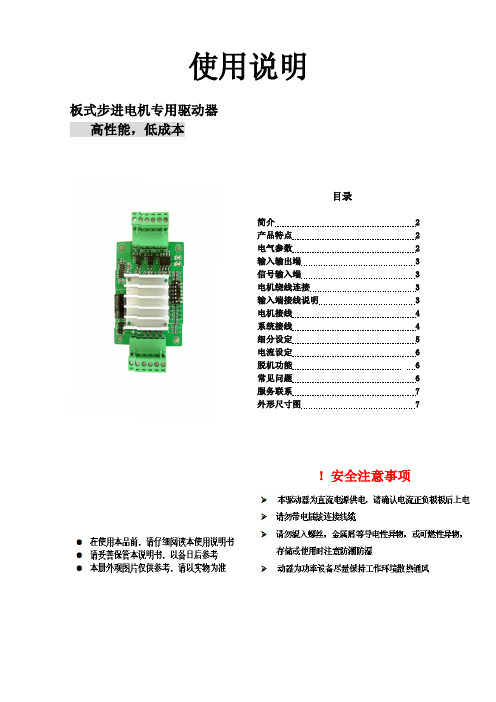
输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信 号DIR+ , DIR-③脱机信号EN+,EN-。输入信号接口有两种接法,用户可根据 需要采用共阳 极接法或共阴极接法。
共阳极接法:分别将PUL+,DIR+,EN+连接到控制系统的电源上, 如果此 电源是+5V 则可直接接入,如果此电源大于+5V,则须外部另加限流 电阻R ,保证给驱动器内部光藕提供8—15mA 的驱动电流。脉冲输入信号通 过CP接入,方向信号通过DIR-接入,使能信号通过EN-接入。如下图:
S6状态 ON ON OFF OFF ON ON OFF OFF
四、关于脱机功能(EN):
打开脱机功能后,电机转子处于自由不锁定状态,可以轻松转动,此时 输 入脉冲信号不响应,关闭此信号后电机接受脉冲信号正常运转。
注:一般在实际应用中可不接。
五、常见问题解答
1、问:初次使用该步进驱动器,如何能尽快上手? 答:正确接好 电源和电机后,只接脉冲信号PUL(先将频率设置为1K以内),细分设置为
16,方向和脱机悬空,此时加电后电机默认正转。运行无误后再 依次测 试加速(提高频率)、方向、细分和脱机等功能。
2、问:控制信号高于5V,一定要加串联电阻吗? 答:是的,否则 有可能烧毁驱动器控制接口的电路。
3、问:接线后电源指示灯亮,但电机不转,是什么原因? 答:如果 接线正确,但仍然不转,说明控制部分驱动能力不够,这种情况多出现在 用单片机的io口直接控制方式。请确保控制接口有5mA的驱动能力
想在此驱动器上加些功能或订做新产品开发,可以联系我。
网址:/?spm=0.0.0.0.Er90EO
电话:18870395548
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机tb6600驱动步进电机正反转加减速应用案例TB6600是一款常见的步进电机驱动器,可以用来驱动步进电机进行正反转以及加减速。
以下是一个简单的应用案例,以单片机控制TB6600驱动步进电机为例,实现正反转和加减速。
硬件连接
1. 单片机(如Arduino)连接到TB6600的信号输入端(A、B、C、D)。
2. 单片机连接到TB6600的使能端(Enable)。
3. 单片机连接到步进电机。
代码实现
以下是一个简单的Arduino代码示例,用于控制步进电机正反转和加减速:
```cpp
include <>
// 定义步进电机参数
const int motorPin1 = 2; // A端
const int motorPin2 = 3; // B端
const int motorPin3 = 4; // C端
const int motorPin4 = 5; // D端
const int enablePin = 6; // 使能端
// 初始化步进电机对象
Stepper stepper(200, motorPin1, motorPin2, motorPin3, motorPin4);
void setup() {
// 初始化串口通信
(9600);
}
void loop() {
// 正转加速到最大速度,然后减速到停止
(5); // 设置初始速度为5步/秒
(100); // 正转100步
delay(500); // 等待500毫秒(减速时间)
(200); // 设置最大速度为200步/秒
(100); // 正转100步
delay(500); // 等待500毫秒(减速时间)
(5); // 设置速度为5步/秒
(100); // 正转100步,然后停止
delay(500); // 等待500毫秒(停止时间)
// 反转加速到最大速度,然后减速到停止
(5); // 设置初始速度为5步/秒
(-100); // 反转100步
delay(500); // 等待500毫秒(减速时间)
(200); // 设置最大速度为200步/秒
(-100); // 反转100步
delay(500); // 等待500毫秒(减速时间)
(5); // 设置速度为5步/秒
(-100); // 反转100步,然后停止
delay(500); // 等待500毫秒(停止时间)
}
```
在这个例子中,我们使用了Arduino的`Stepper`库来控制步进电机。
通过设置不同的速度和步数,可以实现正反转和加减速的效果。
在实际应用中,你可能需要根据具体的硬件和需求进行适当的调整。