3-HALCON_Blob分析
【制造业自动化】_视觉处理系统_期刊发文热词逐年推荐_20140726
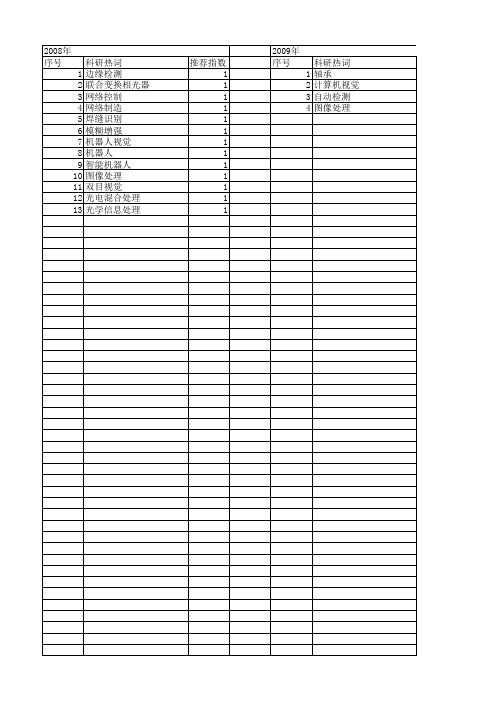
2011年 科研热词 图像处理 机器视觉 阈值 边缘检测 路径规划 视频扫描 视觉系统 视觉导航 装箱缺条 自动计数 自动寻址 移动机器人 直拉法 直径检测 电源管理 棒材 机器人 数字光强传感器芯片 搬运 工件定位 嵌入式系统 小波变换 太阳板 大功率led 外观检测 图像滤波 图像平滑 单晶硅 半导体分立器件 pwm调光 otsu opencv led封装 dsp ccd驱动 blackfin dsp 推荐指数 5 4 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
科研热词 机器视觉 图像处理 视觉识别 工业机器人 霍夫变换 阈值分割 链码 邻域空间 计算机视觉 视觉反馈 自动识别 线阵ccd 离散控制 码垛机器人 直角转弯 物流作业 模具检测 柔性辊弯成型 批次信息检测 多线程 多品种 图像分析 单片机 分拣 光学字符识别 像素跟踪 像素密度 halcon
推荐指数 4 3 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
科研热词 轴承 计算机视觉 自动检测0年 序号 1 2 3 4 5 6 7 8 9
科研热词 图像处理 颜色识别 计算机视觉 视觉检测 视觉处理系统 现场可编程门阵列 机器视觉 fpc dsp
推荐指数 3 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33
说说常用算子select_shape的特性一些使用

说说常⽤算⼦select_shape的特性⼀些使⽤⽤过Halcon的基本都⽤过这个select_shape,灵活⽤起来,还是⾮常好⽤的。
下⾯来说说它的使⽤。
我们阈值分割后,通常的想法是直接选取⾃⼰感兴趣的。
但是这是⾮常理想的状态,按这个思路写的程序,⼋成要被⼯程蹂躏。
⼀般⽤select_shape算⼦来进⾏两类的操作来达成⼯程上更好的鲁棒性:⾸先是⽤select_shape很⼩⼼的过滤掉确定没⽤的⼲扰区域,但是有⽤信息⼜不会损失太⼤。
⽐如⽤area去掉dyn_threshold提取出来的很多⼩噪点。
⽐如离⽬标较远的其他选中区域去掉等。
进⾏blob分析和形态学操作,对感兴趣的⽬标特征进⾏各种特征增强,为后⾯的最后提取⽬标做准备。
最后再⽤select_shape,⼀般⽤多条件组合来选取⽬标区域。
这样写出来的程序才具有更好的鲁棒性,更能适应⼯程需求。
在它的各项特征中,最常⽤⽽有效的就是area⾯积了,另外其他的特性虽然⽤的没那么普及,但是深⼊理解每个特性的具体定义,绝对是事半功倍。
⽐如⽤圆度去除⾮圆弧长条,反之,离⼼率提取细长特征体等等。
磨⼑不误砍柴⼯,花在这个select_shape上的时间是绝对值得的。
题外话:模板匹配,边缘提取,多种阈值分割都值得花⼒⽓掌握,后⾯有时间陆续写。
下⾯是select_shape的Feature的中英⽂解释核⼼:提取出来⽬标形状和⼲扰形状最⼤最明显的本质特征差别,组合特性进⾏筛选。
'area': Area of the object⽬标的⾯积:ROI⾯积⼤⼩进⾏筛选,去掉⼩⾯积的⼲扰,和其他组合效果更好。
'row': Row index of the center'column': Column index of the center中⼼⾏列的值:定位在⼀个范围进⾏筛选'width': Width of the region'height': Height of the region区域的宽度和⾼度:对区域的整体⼤⼩占地进⾏筛选'row1': Row index of upper left corner'column1': Column index of upper left corner左上⾓的⾏列值:可以得到形状的最左最上值'row2': Row index of lower right corner'column2': Column index of lower right corner右下⾓的⾏列值:可以得到形状的最右最下值'circularity': Circularity (seecircularity)圆度,与圆相似程度,圆度=区域⾯积/((中⼼到区域边界的最⼤距离)^2PI),区域⾯积和以最⼤距离为半径的圆⾯积做⽐较,越接近圆,这个⽐值就会越接近1。
halcon三通道转单通道算子
Halcon三通道转单通道算子1. 简介Halcon是一种先进的机器视觉开发库,提供了丰富的图像处理算法和函数。
在图像处理中,有时候需要将彩色图像转换为灰度图像,以便进行后续的分析和处理。
本文将介绍如何使用Halcon来实现三通道(RGB)图像到单通道(灰度)图像的转换。
2. 算法原理在RGB图像中,每个像素由三个通道的数值组成,分别表示红色、绿色和蓝色的亮度。
而灰度图像只有一个通道,每个像素只有一个数值来表示亮度。
因此,将RGB图像转换为灰度图像需要将三个通道的数值进行合并。
常见的灰度化算法有平均值法、加权平均法、最大值法、最小值法等。
其中,平均值法是最简单的一种方法,即将RGB三个通道的数值取平均值作为灰度图像的数值。
3. 算法步骤步骤1: 导入Halcon库首先,需要导入Halcon库,以便使用其中的函数和算子。
可以使用以下代码导入Halcon库:import halcon as ha步骤2: 加载图像使用Halcon的read_image函数加载RGB图像。
图像路径可以根据实际情况进行修改。
image = ha.read_image('path/to/image.jpg')步骤3: 分离通道使用Halcon的channels_to_image函数将RGB图像的三个通道分离出来。
red_channel, green_channel, blue_channel = ha.channels_to_image(image, 'rgb')步骤4: 合并通道使用Halcon的compose3函数将分离出的三个通道合并为一个灰度图像。
gray_image = pose3(red_channel, green_channel, blue_channel)步骤5: 显示结果使用Halcon的disp_image函数显示转换后的灰度图像。
ha.disp_image(gray_image)步骤6: 保存结果使用Halcon的write_image函数将转换后的灰度图像保存到指定路径。
牙体外形识别测量实验报告
牙体外形识别测量实验报告篇一:机器视觉测量实验报告《机器视觉应用实验报告》姓名黄柱汉学号201341304523院系机械与汽车工程学院专业仪器仪表工程指导教师全燕鸣教授2015年04月16日华南理工大学实验报告课程名称:机器视觉应用机械与汽车工程学院系仪器仪表工程专业姓名黄柱汉实验名称机器视觉应用实验日期指导老师全燕鸣一、实验目的主要目的有以下几点:1. 实际搭建工业相机、光源、被摄物体图像获取系统,自选Labview或Matlab、Halcon、Ni Vision软件平台,用打印标定板求解相机内外参数以及进行现场系统标定;2. 进行一个具体实物体的摄像实验,经图像预处理和后处理,获得其主要形状尺寸的测量(二维)3. 进行一个具体实物体的摄像实验,经图像预处理和后处理,识别出其表面缺陷和定位。
二、实验原理“机器视觉”是用机器代替人眼来进行识别、测量、判断等。
机器视觉系统是通过摄像头将拍摄对象转换成图像信号,然后再交由图像分析系统进行分析、测量等。
一个典型的机器视觉系统包括照明、镜头、相机、图像采集卡和视觉处理器5个部分。
HALCON是在世界范围内广泛使用的机器视觉软件,拥有满足各类机器视觉应用的完善开发库。
HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。
HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。
另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件,具有良好的跨平台移植性和较快的执行速度。
本实验包括对被测工件进行尺寸测量和表面缺陷检测。
尺寸测量是通过使用机器视觉来对考察对象的尺寸、形状等信息进行度量;缺陷检测是通过机器视觉手段来分析零部件信息,从而判断其是否存在缺陷。
双目立体视觉问题
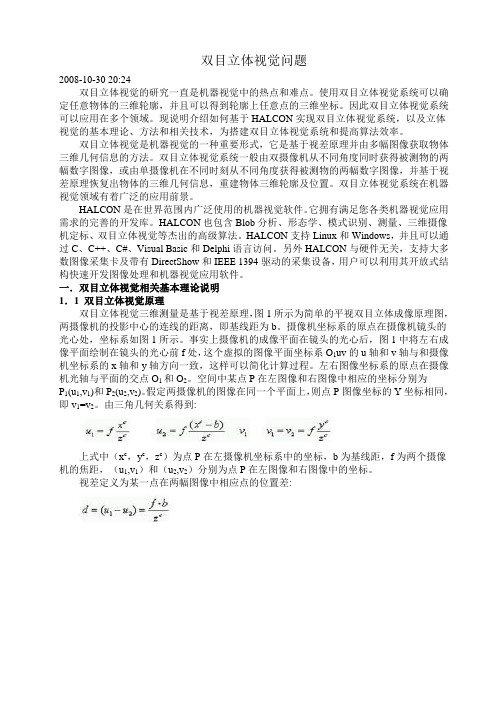
双目立体视觉问题2008-10-30 20:24双目立体视觉的研究一直是机器视觉中的热点和难点。
使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。
因此双目立体视觉系统可以应用在多个领域。
现说明介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率。
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。
双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。
双目立体视觉系统在机器视觉领域有着广泛的应用前景。
HALCON是在世界范围内广泛使用的机器视觉软件。
它拥有满足您各类机器视觉应用需求的完善的开发库。
HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。
HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。
另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。
一.双目立体视觉相关基本理论说明1.1 双目立体视觉原理双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。
摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。
事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。
左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。
基于HALCON的机械手视觉抓取应用研究
基于HALCON的机械手视觉抓取应用研究卢泉奇;苗同升;汪地;杨浩;宗殿栋【摘要】介绍一种特定的抓取式机械手的机械结构,利用HALCON图像处理软件中单目视觉ETH (Eye-to-Hand)系统手眼标定函数对机械手与摄像机系统进行手眼标定实验.利用获得的标定数据进行HALCON的图像处理,并将图像处理程序整合进VS2010平台与其它软件联合完成机械手视觉抓取系统的二次开发.最后用机械手视觉抓取实验来验证研究结果.【期刊名称】《光学仪器》【年(卷),期】2014(036)006【总页数】7页(P492-498)【关键词】HALCON;机器视觉;手眼标定;图像处理【作者】卢泉奇;苗同升;汪地;杨浩;宗殿栋【作者单位】上海大学上海市智能制造及机器人重点实验室,上海200072;上海大学上海市智能制造及机器人重点实验室,上海200072;上海大学上海市智能制造及机器人重点实验室,上海200072;上海大学上海市智能制造及机器人重点实验室,上海200072;上海大学上海市智能制造及机器人重点实验室,上海200072【正文语种】中文【中图分类】TH74引言根据摄像机与机器人的相互位置的不同,机器人视觉系统可分为Eye-in-Hand系统和Eye-to-Hand系统。
Eye-in-Hand系统的摄像机安装在机器人手部末端,在机器人工作过程中随机器人一起运动。
Eye-to-Hand系统的摄像机安装在机器人本体外的固定位置,在机器人工作过程中不随机器人一起运动[1]。
视觉处理项目中的关键技术是摄像机的手眼标定与图像处理。
HALCON是德国MVtec公司开发的图像处理软件,具有完善的综合标准软件库和机器视觉集成开发环境,并提供了丰富的函数库,包括blob分析、形态学、模式匹配、测量、三维目标识别和立体视觉等。
它支持Windows、Linux和Solaris操作环境,整个函数库可以用C,C++,C#,Visual Basic和Delphi等多种普通编程语言开发,有效提高了开发效率,并且执行速度快,具有良好的跨平台移植性[2]。
halcon中的三维匹配原理
halcon中的三维匹配原理一、简介三维匹配是计算机视觉领域的一个重要问题,用于从三维场景中提取目标物体的形状、位置和姿态等信息。
Halcon是一款广泛应用于工业视觉领域的软件库,其中的三维匹配算法是其中的一个重要组成部分。
本文将介绍Halcon中三维匹配的原理和实现方法。
二、三维匹配原理三维匹配的基本原理是通过比较两个或多个图像之间的对应点,来获取场景中物体的形状、位置和姿态等信息。
在三维匹配中,通常使用特征点检测算法来提取图像中的关键点,然后使用匹配算法将这些关键点对齐,以获取场景中物体的三维信息。
1.特征点检测:使用Halcon的FeatureDetector函数来检测图像中的特征点,通常使用SIFT、SURF等算法。
这些算法能够检测出图像中的角点、纹理等特征,并提取出关键点的位置和尺寸信息。
2.特征点匹配:使用Halcon的Matcher函数进行特征点匹配,通常使用基于阈值匹配、最近邻匹配等算法。
这些算法能够将两个图像中的特征点对齐,以获取场景中物体的三维信息。
3.三维重建:通过匹配到的特征点,可以构建出场景中物体的三维模型。
通常使用三角化算法将特征点连接成三角形网格,从而得到物体的三维模型。
三、实现方法在Halcon中,实现三维匹配需要以下步骤:1.读取图像:使用ReadImage函数读取待处理的图像。
2.特征点检测:使用FeatureDetector函数检测图像中的特征点,并提取关键点的位置和尺寸信息。
3.特征点匹配:使用Matcher函数进行特征点匹配,将两个图像中的特征点对齐。
4.三维重建:使用三角化算法将匹配到的特征点连接成三角形网格,从而得到物体的三维模型。
5.结果输出:将重建的三维模型输出到文件中,或者进行其他处理。
四、应用场景三维匹配在许多领域都有应用,如机器人视觉、医学影像处理、3D扫描等。
在机器人视觉中,通过三维匹配可以获取物体的姿态、距离等信息,从而实现对物体的控制和导航。
基于HALCON的机器人视觉系统标定方法研究
基于HALCON的机器人视觉系统标定方法研究宋岳秦;卢军;孙姝丽【摘要】本文提出一种基于HALCON,可以较准确地求出斜切角的工业机器人视觉系统的标定方法.首先对摄相机采集的图片进行标定,从而获取摄像机的参数和位资;其次通过机械手标定得到图像坐标系与机械坐标系可进行相互换算的对应关系;最后将图像坐标系对应的点经过旋转平移转换到机械坐标系,可根据识别得到的像素位置去引导机械手抓取,实验结果表明该标定方法能够提高工业机器人视觉系统的精度、实用性强.【期刊名称】《南方农机》【年(卷),期】2018(049)020【总页数】3页(P46-48)【关键词】机器人标定;斜切角;机器视觉【作者】宋岳秦;卢军;孙姝丽【作者单位】陕西科技大学机电工程学院,陕西西安 710021;陕西科技大学机电工程学院,陕西西安 710021;陕西科技大学机电工程学院,陕西西安 710021【正文语种】中文【中图分类】TP242机器视觉标定是工业机器人的关键技术之一[1]。
摄像机标定是准确测量目标物体的必要过程,通过机器人视觉系统的标定,得到世界坐标系与图像坐标系之间的转换关系,从而可将被检测物体的像素坐标换算成物理坐标,并把结果传给机器设备使其能进行对应的移动。
机器人视觉系统的关键部分是图像处理,HALCON是德国Mvtec公司开发的图像处理软件[2],具有完善的图像处理库和机器视觉集成开发环境,提供了大量的函数库,包括Blob分析、形态学、几何定位、三维目标识别定位和立体视觉等。
1 视觉系统介绍机器视觉系统是利用机器代替人眼来做各种测量和判断,它是计算及科学的一个重要分支,综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。
图像处理和模式识别等技术的快速发展,也大大地推动了机器视觉的发展[3],视觉系统的硬件主要由镜头、摄像机、图像采集卡、输入输出单元、控制装置构成。
halcon 3d点云拟合平面方程
halcon 3d点云拟合平面方程
Halcon是一种常用的工业视觉软件,能够对3D点云数据进行处理和分析。
在Halcon中,拟合平面方程是一个常见的任务,通常用于识别物体表面的平面形状
或进行测量分析。
下面是关于如何在Halcon中拟合3D点云的平面方程的参考内容:
首先,在Halcon中导入3D点云数据,可以通过读取文件或者直接从传感器获
取数据。
确保数据格式正确,并进行必要的预处理,如去噪、滤波等操作,以提高拟合的精度和稳定性。
然后,在Halcon中选择合适的拟合算法,常用的拟合算法包括最小二乘法、
最小二乘法RANSAC、最小二乘法Hough等。
根据实际情况选择最适合的算法,
并设置好拟合参数,如拟合的阈值、迭代次数等。
接下来,使用Halcon提供的拟合函数对3D点云数据进行拟合。
在拟合过程中,系统会自动计算出最佳的平面方程,通常表示为Ax + By + Cz + D = 0,其中A、B、C为平面的法向量,D为平面的截距。
拟合完成后,可以获取平面的参数值以及拟
合的精度评估。
最后,根据拟合的平面方程,可以进行后续的分析和处理。
例如,可以通过平
面方程计算点到平面的距离,进一步筛选或分类点云数据;也可以根据平面方程进行3D重建或形状匹配等操作,实现更复杂的应用。
总的来说,通过在Halcon中拟合3D点云的平面方程,可以快速准确地识别和
分析物体表面的平面形状,为工业视觉领域的自动化生产和质量控制提供了有力的工具支持。
希望以上内容能够满足您的需求,如有任何疑问,欢迎继续咨询。
halcon常用英语单词
halcon常用英语单词"Halcon" 是一个与机器视觉相关的软件,通常用于工业检测和自动化。
在使用Halcon进行编程和算法开发时,会遇到一些常用的英语单词。
以下是一些与Halcon相关的常见英语单词:1.Image - 图像2.Acquisition - 采集3.Processing - 处理4.Analysis - 分析5.Pattern - 模式6.Recognition - 识别7.Feature - 特征8.Extraction - 提取9.Filter - 滤波器10.Segmentation - 分割11.Edge - 边缘12.Blob - 斑块13.Contour - 轮廓14.Calibration - 标定15.Pose - 位姿16.Transform - 变换17.Matching - 匹配18.Measurement - 测量19.Inspection - 检测20.Defect - 缺陷21.Algorithm - 算法22.Parameter - 参数23.Optimize - 优化24.Region - 区域25.Threshold - 阈值26.Camera - 相机27.Lens - 镜头28.Lighting - 照明29.Trigger - 触发30.Interface - 接口31.Software Development Kit (SDK) - 软件开发工具包32.Graphics User Interface (GUI) - 图形用户界面33.Halcon Operator - Halcon操作符/函数34.Toolbox - 工具箱35.Library - 库36.Debugging - 调试37.Performance - 性能38.Accuracy - 精度39.Resolution - 分辨率40.Real-time - 实时41.Batch Processing - 批处理42.Result - 结果43.Output - 输出44.Input - 输入45.Dataset - 数据集46.Training - 训练47.Model - 模型48.Template - 模板49.Validation - 验证50.Error Handling - 错误处理51.Exception - 异常52.Logging - 日志记录53.Documentation - 文档54.Tutorial - 教程55.Example - 示例。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分割: 直方图——分割图像
自动全局阈值分割方法 计算直方图
寻找出现频率最多的灰度值(最大值)
在threshold中使用与最大值有一定距离的值作为阈值
gray_histo (Image, Image, AbsoluteHisto, RelativeHisto) PeakGray := sort_index(AbsoluteHisto)[255] threshold (Image, Region, 0, PeakGray-25)
Threshold的确定——分割图像
0
50
100
150
200
250
0
50
100
150
200
250
Threshold的确定——分割图像
4
8
0
50
100
150
200
250
0
50
100
150
200
250
分割: Binary Threshold ——分割图像
自动地全局阈值方法
多次迭代平滑灰度直方图
difference: 去掉第二个参数与第一个参数共有的区域
定义 算子
用法
结合原有形状来生成图像 返回的点是在一个区域中出现但不在另一区域中
R
S
R\S
Complement ——形态学处理
R x | x R
complement: 计算每个输入区域的补集
定义 算子
用法
得到的结果不是分割出来的区域
分割: Dynamic Threshold——分割图像
滤波的mask尺寸确定了做能分割出来物体 的最大尺寸
经验之谈
mean_image的滤波尺寸 > 被提取物 体的直径
类似条件应用到Gauss filter
如果滤波掩码尺寸太大,那么相邻非常近的 物体将会连在一块 动态阈值也会返回沿着边缘的处理结果 灰度值轮廓图 平滑后的灰度轮廓图
在高通滤波的结果上选择区域
去除小区域
gray_range_rect (Image, ImageResult, 7, 7) threshold (ImageResult, Region, 128, 255)
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 1000, 99999)
R
R
Translation ——形态学处理
定义 算子
Rt x | x t R y | y x t x R
move_region: 整数精度来变换区域
用法
适合模板区域的位置
用来提取边缘边界 (配合difference算子)
R
R( 2,1)
Transposition ——形态学处理
watersheds
watersheds_threshold
Watershed示例——分割图像
医学: 细胞分割
Watershed: 示例——分割图像
制药:使用distance transformation来计算粒子个数
分割: 金属表面——分割图像
纹理滤波
增强了由于字符本身反射所引起的局部高亮对比度
ICs and Pins
Minkowski-Subtraction ——形态学处理
定义:
R S Rs r | s S : r s R t | ( S )t R
sS
(0,0)
R
S
RS
Erosion ——形态学处理
Definition:
RS R s t | St R r | r s R s S x | s S r R : x r s
动态阈值:不同的图像——分割图像
原始图像: 带有不均匀的背景
dyn_threshold: 在字符周围会有“电晕”
var_threshold: 每个字符有着更均匀的背景
var_threshold: 示例——分割图像
光学字符识别
分水岭分割——分割图像
watersheds 是基于灰度的拓扑学来分割一幅图像 一幅图像可以诠释为一座山脉:较高的灰度值
主讲人: 杨永勇
BLOB分析
获取图像
分割图像
形态学处理
特征提取
分割方法——分割图像
阈值
Global, fast, automatic, binary, character, dual, hysteresis
比较
Difference checking, d两个波峰
使用threshold找到两波峰之间的最小值 bin_threshold (Image, Region)
分割: Dynamic Threshold ——分割图像
对于一些应用来说,确定一个全局阈值是不可能的,比如,因为
没有通用的参考图像来确定阴影校正
图像的背景是非均匀的
任意尺寸的结构元素
非常有效的处理 有62个相关算子 经典算子
Erosion, dilation, opening, closing
高级算子
top-hat, bottom-hat, hit-or-miss, boundary
特殊算子
Fitting, pruning, thickening, thinning, skeleton
对于照明条件变化的情况下,确定阈值的另外一种方法就是图像的直方图 假设物体和背景之间有着明显的灰度差
直方图将会有明显的两个波峰:一个是物体,另一个是背景
在物体和背景之间的最小值 另外假设物体有稳定的灰度值 这些阈值对于物体而言是直方图中的最小值 问题: 通常这些最小值不是特明显 平滑直方图:比如1D高斯滤波
分割盆地可以使用常规的分水岭算法 如果相邻的一对盆地的对比度比给定的阈值 要小,那么它们可以成功地合并:
W
max( W B1 ,W B2 ) Threshold
B1 B2
Watershed: 示例——分割图像
比较: watersheds watersheds_threshold
物体在局部范围内通常比背景亮些或者黑些 在这种情况下,寻找一个固定阈值来区分物体和背景是不太容易的 问题: 局部邻域的确定 方法:局部邻域可以由平滑滤波器来确定 (比如, mean_image 或 binomial_filter)
分割: Dynamic Threshold——分割图像
Segmented region after applying dilation (circle, diameter 5)
Connected components (correct decomposition)
Intersection between connected components and segmented region
高级动态阈值算子——分割图像
动态阈值是一种使用广泛的分割方法,在很多应用领域中是比较重要的 HALCON提供了一个高级算子: var_threshold
这个算子有着以下特征:
较好地分开前景和背景 对不合适的参数设置不敏感 因为只使用单个算子就能实现,所以编程容易
缺点是相比dyn_threshold而言需要更长的执行时间
Union ——形态学处理
R S x | x R x S
union1: 把所有region合并成一个变量
union2: 把第二个参数里的所有区域统一到第一个参数的每一个区域中去
定义 算子
用法
结合原有的形状来生成区域 合并分割结果
R
S
RS
Intersection ——形态学处理
dynamic threshold的定义 :
s 表示输入的平滑图像
R ( x, y ) R | g ( x, y ) s( x, y ) t or R ( x, y ) R | g ( x, y ) s( x, y ) t
灰度值轮廓图 平滑后的灰度轮廓图
ICs 和Pins分割——形态学处理
Input image
Segmentation
Dilation + connection
Intersection with segmentation
Rectangles
Diagonal border (dilation + cut)
Search area (dilation with diag. rectangle)
高级Watershed 分水岭——分割图像
如果对比度差异比较少,watersheds_threshold 可以使得相邻的盆地合并 即使在有噪声的条件下,也可以分割区域
噪声降低滤波器的应用可以被忽略,这将会提高形状提取的精度
这算子比如watersheds, 支持uint2 和float 图像 方法:
作为山峰,同时较低的灰度值作为山谷
在山脉中提取出分水岭 在两个盆地之间相应会有一个山脊 参数Basins 包含了这些盆地, 同时 Watersheds包含了一些分水岭 Watersheds 会每幅图像返回单个区域, 同时Basins 包含一系列区域,就是每个不相 交的盆地 在多数情况下,在分割之前去平滑图像是非常必要的
R S x | x R x S
intersection: 第一个参数中的每一个区域与第二个参数中的所有区域进行相交