基于CANopen的轻轨牵引变流器网络控制系统(PDF X页)
CANopen协议在伺服电机控制系统中的实现

CANopen协议在伺服电机控制系统中的实现2007-12-14 22:05基于现场总线的网络技术的研究是自动化领域发展的一个热点,CANopen协议是目前流行于欧洲的基于CAN总线应用层的标准协议,对工程设计者来说,研究现场总线的核心任务就是对控制节点进行开发,本文就是通过实现伺服电机控制模块的CANopen为协议,说明一个基于CANopen协议的控制网络的组态。
伺服电机控制器在自动控制领域里有着广泛的应用,如纺织机械和印刷机等,为了得到理想的速控效果,伺服电机模块除了要在分辨率、线性程度以及转换速率上达到一定的要求外,还应具有良好的在线可控性和实时在线状态检测功能,为此,利用CAN总线高层通信协议CANopen,结合陕西省教育厅“并条机自调匀整” 项目对伺服电机控制模块参数的要求,开发了一个具有硬件可重用性、软件可重配置特点的伺服电机控制模块。
1 CANopen协议概述[1-2]CANopen 协议是由CiA协会针对CAN协议的不完整性而定义出的一个更高层次的协议——应用层协议。
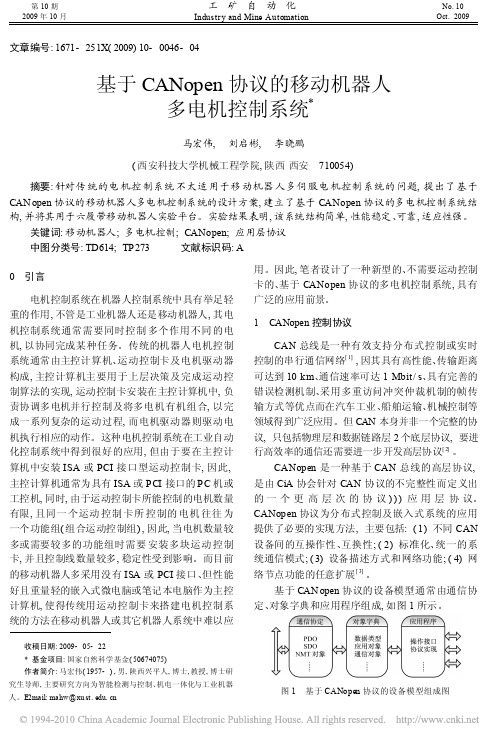
一个CANopen设备模块可分为3部分,如图1所示,通信接口和协议软件用于提供在总线上收发通信对象的服务,不同CANopen设备间的通信是通过交换通信对象来完成的。
这一部分直接面向CAN控制器进行操作,对象字典描述了设备使用的所有数据类型、通信对象和应用对象,对象字典位于通信程序和应用程序之间,用于向应用程序提供接口,应用程序对对象字典进行操作,即可实现CANopen通信。
它包括功能部分和通信部分,通信部分通过对对象字典进行操作实现CANopen通信,而功能部分则根据应用要求来实现。
在CANopen 网络系统中每个节点都有唯一的一个对象字典,而且每个节点的对象字典都具有相同的结构,但具体的内容要根据不同的设备而定,包含了描述该设备及其网络行为的所有参数,CANopen协议还定义了4种报文(通信对象),用于对不同作用的信息进行处理,分别为管理报文(NMT)、服务数据对象(SDO),过程数据对象(PDO)和预定义报文或特殊功能对象。
基于canopen协议的移动机器人多电机控制系统
图
基于 CANopen 协议的设备模型组成图
2009 年第 10 期
马宏伟等: 基于 CANopen 协议的移动机器人多电机控制系统
# 47 #
通信协定用于提供在总线上收发通信对象的服 务, 不同 CANopen 设备间的通 信是通过交换 通信 对象来完成的 , 这一部分直接面向 CAN 控 制器进 行操作。对象字典描述了 CANopen 设备使用的所 有数据类型、 通信对象和应用对象 , 对象字典位于通 信协定和应用程序之间, 用于向应用程序提供接口。 应用程序对对象字典进行操作 , 它包括功能部分和 通 信 部 分, 通 信 部 分 通 过 操 作 对 象 字 典 实 现 CAN open 通信, 而功能部分则根据具体的应用要求 来实现 。 CAN open 通过不同的通信对象来完成网络的 通信和管理 , 并通过 PDO、 SDO 及 NMT 等对象来 实现通信、 网络管理及紧急情况处理等功能。其中 , SDO 为 服 务 数 据 对 象 , 该 对 象 可 以 传 输 大 于 8 B 的数据信息 , 即 SDO 传送协议允许传送任意长 度的对象。在传送时, 发送和接收者间将建立点对 点的通信, 称之为客户机/ 服务器模式 , 发送者为客 户机 , 接收者为服务器。接收者每收到 1 个信息, 要 向发送者确认收到该信息。例如, 当写数据时 , 客户 端先发送一个标示被写对象的请求 , 服务器收到请 求后返回一个确认信息; 当要读数据时 , 客户端先发 送一个标示被读对象的请求, 服务器收到请求后返 回被读对象的数据, 如图 2 所示。
图2
SDO 通 信模型图
图 4 基于 CANopen 协议的多电机控制系统结构图
在通信 时, CANopen 的物理层 CANbus 每 次 传送的数据量不大, 其中包括 11 位元的 ID 、 远端传 输请求( RT R) 位元及大小不超过 8 位元的数据, 如 图 3 所示。 CANopen 将 CAN bus 11 位元的 ID 分 为 4 位元的功能码及 7 位元的 CANopen 节点 ID。 7 位元的 ID 共有 128 种不同的组合, 其中 ID 0 不使 用, 因此, 1 个 CANopen 网络上最多允许 127 台设 备。 CAN open 将 CANbus 的 11 位元 ID 称为通信 对象 ID ( COB- ID) 。当 传 输 数 据 出 现 冲突 时 , CAN bus 的仲裁机制会使 COS - ID 最小的信息继 续传送, 不用等待或重传。COB- ID 的前 4 个位元 是 CA Nopen 的功能码 , 因此 , 数值小的功能码表示 对应的功能重要 , 允许的延迟时间较短。
轨道交通CANopen通信的快速实现——基于CANopen协议的XGate-COP10应用

轨道交通CANopen通信的快速实现——基于CANopen协
议的XGate-COP10应用
佚名
【期刊名称】《电子技术应用》
【年(卷),期】2011(37)11
【摘要】1引言城市轨道交通(Rail Transit)具有运量大、速度快、安全、准点、保护环境、节约能源和用地等特点.世界各国普遍认识到:解决城市交通问题的根本出路在于优先发展以轨道交通为骨干的城市公共交通系统.近几年,国内的城市轨道交通得到了快速发展,城市交通在一定程度上得到改善.轨道交通控制系统中各个设备之间需要通信,CAN总线是轨道交通行业中流行且应用成熟的通信方式,基于CAN总线应用层的CANopen协议对所有设备做出了"设备级"的规范.
【总页数】2页(P24-25)
【正文语种】中文
【相关文献】
1.风电变流器设备CANopen通信的快速实现——基于CANopen协议的XGate-COP10应用 [J],
2.倾角传感器CANopen通信的快速实现——基于CANopen协议的XGate-COP10应用 [J],
3.测量设备CANopen通信的快速实现——基于CANopen协议的XGate-COP10应用 [J],
4.变频器设备如何快速实现CANopen通信——基于CANopen协议的XGate-COP10应用 [J], 广州致远电子有限公司
5.如何快速实现CANopen从站转Modbus网关——基于CANopen协议的XGate-COP10应用 [J], 广州致远电子有限公司
因版权原因,仅展示原文概要,查看原文内容请购买。
基于canopen协议的块sdo列车数据传输系统
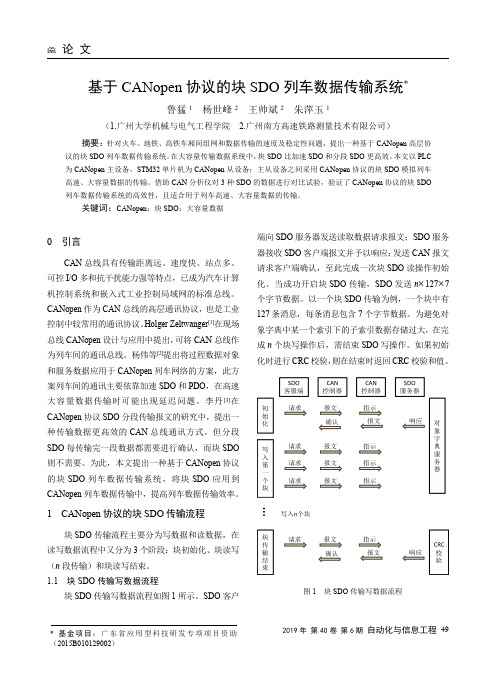
论文2019年第40卷第6期自动化与信息工程49*基金项目:广东省应用型科技研发专项项目资助(2015B010129002)基于CANopen 协议的块SDO 列车数据传输系统*鲁猛1杨世峰2王帅斌2朱萍玉1(1.广州大学机械与电气工程学院2.广州南方高速铁路测量技术有限公司)摘要:针对火车、地铁、高铁车厢间组网和数据传输的速度及稳定性问题,提出一种基于CANopen 高层协议的块SDO 列车数据传输系统。
在大容量传输数据系统中,块SDO 比加速SDO 和分段SDO 更高效。
本文以PLC 为CANopen 主设备,STM32单片机为CANopen 从设备;主从设备之间采用CANopen 协议的块SDO 模拟列车高速、大容量数据的传输。
借助CAN 分析仪对3种SDO 的数据进行对比试验,验证了CANopen 协议的块SDO 列车数据传输系统的高效性,且适合用于列车高速、大容量数据的传输。
关键词:CANopen ;块SDO ;大容量数据0引言CAN 总线具有传输距离远、速度快、站点多、可控I/O 多和抗干扰能力强等特点,已成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线。
CANopen 作为CAN 总线的高层通讯协议,也是工业控制中较常用的通讯协议。
Holger Zeltwanger [1]在现场总线CANopen 设计与应用中提出,可将CAN 总线作为列车间的通讯总线。
杨伟等[2]提出将过程数据对象和服务数据应用于CANopen 列车网络的方案,此方案列车间的通讯主要依靠加速SDO 和PDO ,在高速大容量数据传输时可能出现延迟问题。
李丹[3]在CANopen 协议SDO 分段传输报文的研究中,提出一种传输数据更高效的CAN 总线通讯方式。
但分段SDO 每传输完一段数据都需要进行确认,而块SDO 则不需要。
为此,本文提出一种基于CANopen 协议的块SDO 列车数据传输系统,将块SDO 应用到CANopen 列车数据传输中,提高列车数据传输效率。
CAN总线与车辆网络控制系统
CAN总线与车辆网络控制系统随着汽车科技的不断发展,车辆网络控制系统在现代汽车中扮演着越来越重要的角色。
而CAN(Controller Area Network)总线技术,则是车辆网络控制系统中至关重要的组成部分之一。
CAN总线作为一种先进的通信协议,为车辆内部各种控制单元之间的通信提供了高效、可靠的解决方案。
本文将探讨CAN总线技术在车辆网络控制系统中的应用,以及其在提高汽车性能、安全性和可靠性方面的重要作用。
一、CAN总线技术概述CAN总线技术是一种串行通信协议,最初由德国的Bosch公司在1980年代开发。
它采用了差分信号传输和CSMA/CA(载波监听多路访问/碰撞检测)的通信方式,能够在汽车等工业环境中提供可靠的数据传输。
CAN总线主要分为两种速率,即高速CAN(ISO 11898-2)和低速CAN(ISO 11898-3),分别适用于不同的汽车系统和传感器。
二、CAN总线在车辆网络中的应用1. 控制单元通信:CAN总线连接了车辆内部的各种控制单元,如发动机控制单元(ECU)、制动系统、空调控制等,实现它们之间的实时数据交换和通信。
这种分布式的控制架构使得车辆系统更加灵活高效。
2. 数据传输:CAN总线可靠地传输各种类型的数据,包括引擎参数、车速、转向角度等。
这些数据对于车辆的正常运行和驾驶员的驾驶体验至关重要。
3. 网络管理:CAN总线具有自动检测和纠正错误的能力,能够在通信过程中实时监测数据的完整性和准确性,提高了系统的可靠性和稳定性。
三、CAN总线在提升汽车性能和安全性方面的作用1. 实时性能:CAN总线的高速通信能力确保了车辆各个系统之间的实时数据传输,从而提高了车辆的响应速度和性能。
2. 故障诊断:CAN总线可以通过故障码诊断系统快速检测和定位车辆故障,提高了维修效率和成本效益。
3. 安全性:CAN总线具有高度的数据完整性和稳定性,能够有效防止数据的篡改和恶意攻击,保障了车辆系统的安全性。
基于CANopen协议的AGV多轮驱动控制系统
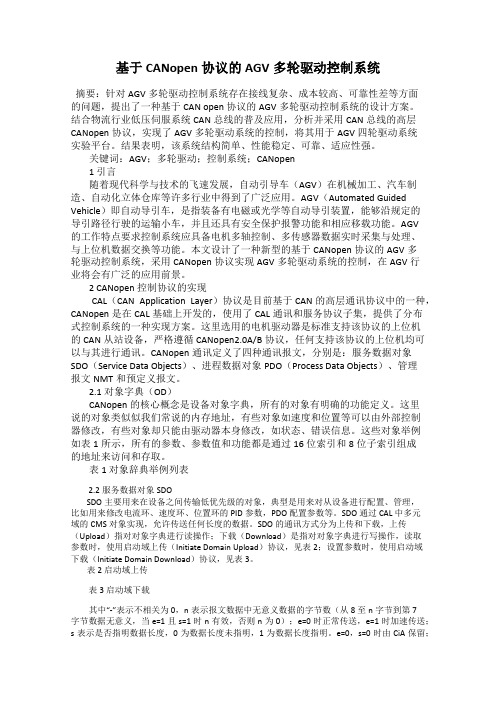
基于CANopen协议的AGV多轮驱动控制系统摘要:针对AGV多轮驱动控制系统存在接线复杂、成本较高、可靠性差等方面的问题,提出了一种基于CAN open 协议的AGV多轮驱动控制系统的设计方案。
结合物流行业低压伺服系统CAN总线的普及应用,分析并采用CAN总线的高层CANopen协议,实现了AGV多轮驱动系统的控制,将其用于AGV四轮驱动系统实验平台。
结果表明,该系统结构简单、性能稳定、可靠、适应性强。
关键词:AGV;多轮驱动;控制系统;CANopen1 引言随着现代科学与技术的飞速发展,自动引导车(AGV)在机械加工、汽车制造、自动化立体仓库等许多行业中得到了广泛应用。
AGV(Automated Guided Vehicle)即自动导引车,是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶的运输小车,并且还具有安全保护报警功能和相应移载功能。
AGV的工作特点要求控制系统应具备电机多轴控制、多传感器数据实时采集与处理、与上位机数据交换等功能。
本文设计了一种新型的基于CANopen协议的AGV多轮驱动控制系统,采用CANopen协议实现AGV多轮驱动系统的控制,在AGV行业将会有广泛的应用前景。
2 CANopen 控制协议的实现CAL(CAN Application Layer)协议是目前基于CAN的高层通讯协议中的一种,CANopen是在CAL基础上开发的,使用了CAL通讯和服务协议子集,提供了分布式控制系统的一种实现方案。
这里选用的电机驱动器是标准支持该协议的上位机的CAN从站设备,严格遵循CANopen2.0A/B协议,任何支持该协议的上位机均可以与其进行通讯。
CANopen通讯定义了四种通讯报文,分别是:服务数据对象SDO(Service Data Objects)、进程数据对象PDO(Process Data Objects)、管理报文NMT和预定义报文。
2.1 对象字典(OD)CANopen的核心概念是设备对象字典,所有的对象有明确的功能定义。
基于CANopen的工程机械控制器设计
第35卷第5期2020年10月成都信息工程大学学报JOURNAL OF CHENGDU UNIVERSITY OF INFORMATION TECHNOLOGYVol.35No.5Oct.2020O文章编号:2096-1618(2020)05-0487-06基于CANopen 的工程机械控制器设计王紫瑞1,2,关旭2,3,冀雯馨4(1.辽宁工程技术大学研究生院,辽宁葫芦岛125105;2.辽宁省露天矿山装备专业技术创新中心,辽宁阜新,123099;3.辽宁瀚石机械制造有限公司,辽宁阜新,123000;4.常熟理工学院电子信息工程学院,江苏常熟215500)摘要:针对国内中高端的工程机械控制器市场主要被国外厂商垄断,导致工程机械控制器价格昂贵、后期维护能力差、供货周期长,而传统控制器又不能够满足现代化工程机械的控制中的高速通信需求的问题,设计了基于CANopen 的工程机械控制器。
选用Infineon 的XC2287M 芯片作为平台的核心部件,详细说明系统中各模块的作用,并且完成系统原理图和PCB 的设计;选择符合IEC61131-3标准的CoDeSys 作为控制器的调度核心,进行CoDe-Sys Runtime 的移植和I /O 接口配置;控制器采用CANopen 协议应用于控制系统中,使得通信更加方便快捷;对控制器进行基本功能测试和CAN 通信测试。
实验结果表明,基于CANopen 的工程机械控制器能够实现对矿山工程机械的控制。
关键词:工程机械;控制器;CoDeSys ;CANopen ;可靠性中图分类号:TP273文献标志码:Adoi :10.16836/j.cnki.jcuit.2020.05.001收稿日期:2020-05-28基金项目:国家自然科学基金资助项目(51274118)0引言目前工程机械控制器已经广泛应用于矿山开采、特种车辆、工业民用建筑、高铁、交通运输、国防建设等领域[1-3]。
基于CANopen协议的汽车控制网络初探
基于CANopen协议的汽车控制网络初探
孔峰;张衡;宋雪桦;张育华
【期刊名称】《汽车工程》
【年(卷),期】2007(029)007
【摘要】CANopen是CAN的应用层协议,基于CANopen协议标准的嵌入式网络具有配置灵活的特点.作者分析了CANopen协议的特性,设计一个基于CANopen的汽车控制网络雏型,给出开发控制器应用层的方法.一致性试验表明,所设计的汽车控制网络符合采用的CANopen协议规范.
【总页数】4页(P594-596,605)
【作者】孔峰;张衡;宋雪桦;张育华
【作者单位】恒驰科技有限公司,镇江,212009;江苏大学计算机科学与通信工程学院,镇江,212013;江苏大学计算机科学与通信工程学院,镇江,212013;恒驰科技有限公司,镇江,212009
【正文语种】中文
【中图分类】U4
【相关文献】
1.基于CANopen协议的混合动力汽车车载网络设计 [J], 谭捷;杨正林;毛建国;陆建康;岳崇会
2.基于CANopen协议的混合动力汽车车载网络设计 [J], 谭捷;杨正林;毛建国;陆建康;岳崇会
3.基于神经网络的汽车车身造型美学评价初探 [J], 黄向东;谢朝林;谢岳璁
4.基于CANopen协议的网络控制系统研究与开发 [J], 邢月华;付磊;赵海院
5.基于控制器局域网络的汽车电气控制系统设计与实现 [J], 刘贯华
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MicroCANopen的网络设计与实现
( azo ntu f h s sL nh u7 00 。 hn ) L nh uIstt o yi 。a zo 30 0 C ia i e P c
Ab t a t I r e o i r v h tn a d z t n。man a n b l y-s aa l y o a h n d n s a e r f c mm u c to ys m i h s r c :n o d rt mp o e te sa d r ia i o itia it i c bi t fe c o e i p c c at o l i nia n s t i e wh c b sd o a e n CAN- u .ti e t r d o e d sg n mp e n a i n o e wo k b s d o i r CA o n。a k n f ca s p n s u c b s i s c n e e n t e i n a d i l me t t fn t r a e n M c o N h o e p ido l i o e o re s c p t c ls c o e h g l v lCAN— u r t c lCA o c . On t e o e h n h e ma tr c e i mp e ne y i r v n c ・ o r o o t k f t h— e e a h i b sp o o o N pn n a d。t s e o s i lme td b mp i g Mi r h d o o CANop n s a e p o o o t c o e e lv rtc ls k c a d .On t e o e a d-t e CANo n n t r ih h se d s v r lsa e s a h e e y U t rh h h n h e p ewo k wh c a a ma tr a e e a lv si c iv d b — s n s gI i XXAT’ B— o— N d p e 。a h n e l i g h r wa e s p o t o c n e tt e P .An e c ro t e so o n S US t CA a a tr st e u d r n a d r u p r 。t o n Cs y c h d t o r  ̄n s fc mmu i a o h nc t n i
CANopen总线在轨道车辆通信网络中的应用
CANopen总线在轨道车辆通信网络中的应用
李正;郭勇;李辉;孙晓星;李星宜
【期刊名称】《科技信息》
【年(卷),期】2014(000)015
【摘要】CANopen协议作为CAN总线的应用层扩展协议,对CAN总线协议的不足进行了补充,并在工业控制领域得到了广泛应用.本文对CANopen在列车网络控制系统中的应用进行了描述;分析了CANopen列车总线网络通信的设计,对CANopen总线作为列车级总线的网络拓扑结构进行了设计;最后通过CAN总线分析工具CANAlyzer在实际应用车辆上对不同工况下的通信数据传输进行了采集和分析,数据显示CANopen在传输数据量较小的总线网络中应用较好.
【总页数】2页(P99-100)
【作者】李正;郭勇;李辉;孙晓星;李星宜
【作者单位】唐山轨道客车有限责任公司,河北唐山063035;唐山轨道客车有限责任公司,河北唐山063035;唐山轨道客车有限责任公司,河北唐山063035;唐山轨道客车有限责任公司,河北唐山063035;唐山轨道客车有限责任公司,河北唐山063035
【正文语种】中文
【相关文献】
1.基于CANopen协议的城市轨道交通直线电机车辆通信网络研究与实现 [J], 程宁子;李耀华;张瑞华;王珂
2.CANopen作为轨道交通车辆总线的可行性研究 [J], 梅樱;刘志刚;王磊;客金坤
3.CANopen总线在地铁车辆中的应用 [J], 尹法伟;王云飞;杨朝青
4.CANopen总线协议在地铁通信网络中的应用 [J], 陈伟文; 凌玉华; 颜毅斌
5.基于CAN总线的CANopen协议讲座(12) 如何快速实现CANopen网络的组建与配置——基于CANopen协议的通信网络 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第22卷 Vo1.22 第15期 No.15 电子设计工程 Electronic Design Engineering 2014年8月
Aug.2014
基于CANopen的轻轨牵引变流器网络控制系统 梁东升.方晓 (广州地铁运营事业总部基地广东广州510010)
摘要:轻轨以其舒适、快捷、便利等特点成为人们出行的一种重要运输工具,为缓解城市交通拥堵做出突出贡献。轻 轨牵引变流器负责为车辆提供牵引力,其可靠运行关系整个车辆的安全行驶。文中采用CANopen通信技术,针对轻 轨车辆牵引变流器设计了新型的网络控制系统,负责车辆各牵引单元的实时控制和数据通信,详细阐述了CANopen 网络控制系统的设计过程,并通过CAN分析仪对网络控制系统的运行数据进行监测,验证了CANopen网络控制系 统的可行性及其通信的正确性。 关键词:轻轨车辆;CANopen;对象字典;通信对象 中图分类号:TN919 文献标识码:A 文章编号:1674—6236(2014)15—0067—04 Networked control system of light rail traction converter based on CANopen
LIANG Dong—sheng,FANG Xiao (Guangrhou Metro operation Business Headquarters,Guangzhou 510010,China)
Abstract:Light rail is becoming an important means of transport with its comfortable,fast and convenient characteristics,and it has made outstanding contributions to alleviate urban traffic congestion.Light rail traction converters provide traction for vehicles,its reliable operation has an important effect on safety of the vehicle.This article uses CANopen communication technology,and designed a new type of network control system for traction converters.It"S responsible for real-time control and data communication of vehicle traction unit.This article expounds on the design process of CANopen network control system, and analyzes the operation data by CAN analyzer.The monitoring results of CAN analyzer verify the feasibility of CANopen network control system. Key words:light rail vehicle(LRV);CANopen;object dictionary;communication object
目前.轻轨运输系统以其舒适、安全、低能耗、承载人数 多等特点受到人们的青睐,成为市内交通的主要运输形式, 国内许多城市均展开轻轨的建设。其中牵引变流装置负责为 轻轨车辆提供动力并对电机运行情况进行监测。是轻轨建设 过程中的核心装置.直接影响着车辆运行的稳定性和安全 性。网络控制系统将车辆中不同位置的牵引变流器通过网络 线缆连接起来,形成一个信息交互网络。完成牵引变流器的 运行数据通信和监测。而轻轨车辆的高可靠性需求对牵引变 流器及其控制网络提出较高的要求[1-31。 针对轻轨车辆牵引变流器的控制需求,文中采用 CANopen作为牵引变流器的控制网络,充分发挥CANopen可 靠灵活、实时性强的特点,设计了满足轻轨车辆运行高需求 的牵引变流器网络控制系统 。 1轻轨牵引变流器简介 牵引变流器结构如图1所示.负责为和牵引控制单元组 成,牵引变流器控制电机出力,为车辆提供牵引动力。每个牵 引变流器均有一个牵引控制单元对变流器及电机运行状态 收稿日期:2013—08—07 稿件编号:201308056 作者简介:粱东升(1965一),男,河南安阳人,总工程师。 进行监测和控制,实现变流器数字量和模拟量的采集和通 信,完成车辆制动控制以及车载设备的保护和故障检测。 DC750V
图1轻轨牵引变流器结构图 Fig.1 Converter structure of rail traction
2 CANopen协议概述
CAN(Controller Area Network)是一种支持分布式控制的 总线式通信网络。CANopen协议是基于CAN总线的应用层 协议,在机械制造、铁路、车辆、船舶、制药、食品加工等领域 已得到广泛应用。 CANopen协议的通信依赖于4种通信对象。分别是负责
研究方向:城市轨道车辆通信与信号。 67—. 《电子设计工程 ̄2014年第l5期 网络启动和管理的网络管理对象NMT;进行对象字典访问的 服务服务数据对象SDO:实时数据传输的过程数据对象PDO 以及特殊功能/预定义连接集对象。 在CANopen协议规范中.通过设备模型对不同功能的设 备进行描述达到统一观察和设计目的。设备模型如图2所 示,由通信单元、对象字典及应用单元组成。 应用部分 对象字典 通讯接口 服务数据对象 ● + 应用程序 ●—+ 数据类型 ●——■ 过程数据对象 ●—_. 通讯对象 网络管理对象 设备描述 应用对象 特殊功能对象 图2 CANopen设备模型 Fig.2 Device model of CANopen 其中,对象字典是CANopen协议的核心,集合了设备的 所有数据结构。在CANopen网络系统中每个节点都有惟一的 对象字典,且结构基本相同,内容依据设备而定,包含描述这 个设备网络行为及其应用对象的所有参数。对象字典是预先 确定的,通过访问对象字典可以得到各节点的状态,确定网 络的通信模式 。 3 CANopen网络控制系统设计 3.1方案设计 CANopen网络控制系统主要针对牵引控制单元之间的 通信而设计。在CANopen网络中,为了便于整个网络的管理, 采用主从式的网络结构.系统中存在一个主节点和多个从节 点.网络控制系统架构如图3所示。主节点通过协议中的 NMT对象实现网络管理,如系统初始化、网络配置、启动和停 止从节点.侦测失效节点等功能,从而可对所有从节点的工 作状态进行管理及监控。从节点负责将各节车辆的牵引运行 数据传输到主节点,实现数据的通信和管理。 CANopen总线 主牵单元 主节点 子牵单元1 从节点1 子牵单元2 从节点2 子牵单元3 从节点n 图3 CANopen网络控制系统架构 Fig.3 Control system architecture of CANopen network 在本文中,网络控制系统的设计以6节列车车厢编组为 研究对象,由3个车辆单元构成,每个单元包括一节动车和 节拖车,每节动车安装有牵引变流器。在车头动车中设置 牵引主控单元做为整个网络的主节点。构成一个一主三从的 CANopen网络控制系统。 3.2对象字典建立 根据CANopen协议规定,网络中每个设备节点均需设计 个对象字典对其参数进行描述并完成相应的功能【8】。针对 3.1中设计的一主三从的网络结构.需要为主节点和各从节 点分别设计对象字典。根据对象字典的通用结构和建立规 则。各节点之间的数据通信主要以PDO和SDO方式进行。主 节点对3个从节点进行管理,所以配置3个SDO服务数据对 象,分别完成对应从节点的参数配置,同时主节点在网络工 68- 作过程中要完成过程数据的接收和发送,所以配置一个过程 数据对象PDO。主节点对象字典设计如表1所示。
表1主节点对象字典 Tab.1 0bject dictionary of master node
各从节点需要配置一个过程数据对象PDO和一个服务 数据对象SDO来响应主节点的管理并完成通信功能。各从节 点功能相同,所以具有相同的对象字典如表2所示。 表2从节点对象字典 Tab.2 Object dictionary of slave node
CANopen网络对象字典的建立有助于更好的进行软件 设计和试验调试。在组网过程中,建立好的对象字典将写成 EDS文件的格式导入到主节点配置软件,便于主节点通过对 象字典配置所有节点的参数。 3.3通信协议制定 CANopen网络按照对象字典中定义的参数进行数据的 收发通信。在收发过程中,数据需按照一定的规则进行,这个 规则就是通信协议。本文针对轻轨车辆牵引控制单元之间的 通信,主要是主牵引控制单元和各子牵引单元之间的信息交 互,包括主牵引单元向子牵引单元发送以及子牵引单元向主 牵引单元发送数据每个方面。这两方面都需要设计相应的通 信协议规定数据的具体交互形式,包括数据名称、数据格式、 数据描述等内容。表3和表4分别列举了牵引单元部分数据 的通信协议是针对这两个方面设计的通信协议。 从上表的通信协议中可以看到,主牵单元向子牵单元传 输的数据主要是控制参数.用于对电机进行矢量控制。子牵 单元向主牵单元传输的数据主要是车辆设备的运行监测参 数,实时反映车辆、变流器、电机等设备的运行情况。 3.4网络调度设计 在CANopen网络中.数据通信采用载波监听多路访问/