VISSIMPARAMICSTSIS仿真软件对比分析
vissim
vissim非常感谢您的提问。
作为一名计算机科学领域的学者,我非常了解Vissim这个软件。
Vissim是一款交通仿真软件,它能够模拟交通流和车辆行驶,帮助交通规划者和城市规划者进行交通分析和规划。
下面我将从以下几个方面谈谈我对Vissim的认识和使用心得。
1.软件介绍Vissim是由德国PTV公司开发的一款交通仿真软件,旨在模拟现实世界中的交通流和车辆行驶,对城市交通规划和设计提供参考。
该软件具有多种交通模式和路网布局,可以进行多种交通仿真实验,如车辆路径选择、行驶速度、信号灯设置等。
此外,该软件还可以计算车辆通行时间、拥堵情况和环境影响等。
2.使用体验我在多个项目中使用过Vissim,并且使用它进行了一些学术研究。
总体而言,我认为Vissim相比其他交通仿真软件拥有更多的交通模式和丰富的参数设置,它可以更好地模拟现实世界的交通情况,因此它的仿真结果更具有参考价值。
例如,我曾经使用Vissim对一个城市中心的交通环境进行仿真分析。
我构建了一个城市中心区域的路网模型,并设置了多个路口和信号灯,以模拟城市中心区域的交通情况。
我分别设置了不同的车辆密度、车速、信号灯时间等参数,通过多次仿真实验,得出了不同交通情况下车辆平均通过时间等数据。
此外,我还使用Vissim对交通拥堵情况进行了分析,研究了不同拥堵情况下的行驶速度和延误时间。
3.优缺点作为一名使用Vissim多年的学者,我认为该软件具有以下优点和缺点。
优点:1) 丰富的交通模式和参数设置,能够更好地模拟现实世界的交通情况。
2) 易于操作和学习,用户可以使用脚本编写交通仿真实验。
3) 可以为交通规划和城市设计提供参考。
缺点:1) 需要较高的计算机配置。
2) 需要大量的数据输入和处理,数据量较大。
3) 软件使用需要付费。
4.结论Vissim是一款用于交通仿真的优秀软件,具有较高的仿真精度和可靠性,适用于交通规划和城市设计等领域。
在未来,我相信Vissim将会继续发挥重要作用,帮助我们更好地理解和分析交通流和城市交通状况。
Vissim交通仿真软件

提纲
1 交通仿真技术 2 微观交通仿真 3 Vissim交通仿真软件简介 4 Vissim交通仿真软件基础知识
1 交通仿真技术
一、什么是交通仿真
采用计算机数字模型来反映复杂道路交通现 象的交通分析技术和方法。 作用: 1)分析预测交通堵塞的地段和原因。 2)对城市规划、交通工程、和交通管理的有关方 案进行比较和评价。
2 微观交通仿真
一、微观交通仿真
以各个车辆个体在路网空间上的运动为求解目标。 应用范围:
1)求解任何时刻路网各处 的车辆密度分布 2)任何观测点的车流量 分布形态 3)出行车辆到达目的地 所需的时间及其分布 4)研究车辆的燃油消耗 和排放
2 微观交通仿真
二、交通仿真模型
2 微观交通仿真
二、交通仿真模型 2)交通生成模型
二、按钮
连续仿真/测试 单步仿真/测试 停止仿真/测试
4 Vissim交通仿真软件入门
三、菜单
文件 编辑 网络编辑 信号控制 选项 仿真 演示 测试
4 Vissim交通仿真软件入门
实验:高速公路基本路段仿真
4 Vissim交通仿真软件入门
实验:高速公路基本路段仿真
已知某路段的平面布局如图44所示,双向12车道,每车道宽度3.5米, 路段中间有一立交桥,高15米。路段交通流量如表1所示。依据已知 数据建立该路段交通仿真模型。
不需要太多的数学知识去建立一些解析模型。
(5)可控制性
容易使某些参数的作用限制在一定范围或特定值。
(6)快速真实性
与实际交通调查相比,交通仿真可以快速获得结果
(7)可拓展性
可以使某些参数(如车速、交通量等)超出实际调查所能得到的范围。
交通仿真软件VISSIM操作与应用

• 按住<Ctrl>,在选择范围之外点击鼠标左键,取消已 选取的全部内容。
• 在选择范围内点击鼠标左键,移动选定的所有路段/连 接器。
• 多选模式下可修改的路段属性数据:
• 路段类型、坡度、区段评价、区段长度、费用、 车道关闭、 连接器
4. 交通仿真的优缺点
• 优点 ---
(1) 灵活性 (不受时间和空间的制约) (2) 可重复性 (克服交通调查的不可再现性) (3) 可进行方案实施前后的比较 (4) 节省人力和时间
• 缺点 ---
(1) 容易误导用户 (2) 只是客观系统的模拟,并不是系统的最优化 (3) 难以获得模型标定所需大量数据 (4) 仿真结果不易被接受(信任度较低)
• 20世纪60年代初,宏观交通仿真 • 20世纪60年代末,微观交通仿真
软件开发阶段
• 第三阶段(20世纪80年代初--)
• 系统建模突破微观模型与宏观模型界限,出现混合 模型( INTEGRATION)
• 仿真软件向大型化、综合性发展(Trips、 TransCAD、Paramics)
• 从软件开发转向系统模型改进 • 新的计算机技术应用(仿真界面更友好、人机交互
• 各类车辆的期望行车速度分布,以及在路网中 不同位置的车速的变化
• 在需要对模型进行标定时,还需要部分行程时 间和饱和流量
2.3 信号控制数据
• 每个交叉口的信号周期、绿灯时长和红黄时长 • 定时控制:每个信号灯组的红灯结束时间和绿
灯结束时间 • 感应控制
• 信号阶段定义 • 信号阶段的间隔定义(从CROSSIG导出) • 最小绿灯和红灯时长 • 感应控制逻辑流程图 • 感应逻辑实施的相关参数
_用微观交通仿真软件实现ITS模拟的比较研究

用微观交通仿真软件实现 ITS 模拟的比较研究 ———胡明伟 郭秀芝
21
图 2 Getram/ Aimsun2 组成示意图
控制 、交通管理系统 、事件管理系统 、车辆导航 、 VMS、公交车辆调度和控制系统的模拟 ,通过 Scats Interface 实现与 Scats 的并行仿真 ,其启发式的动 态分配算法 (heuristic dynamic assignment) 为路径诱 导仿真提供了可行性 。Aimsun2 实现 ITS 模拟有 两种方式 : ①由 Aimsun2 自身提供 ,例如模拟 VMS 发布诱导信息 ; ②通过外部程序接口 Getram Ex2 tensions 进行 ,外部程序接口 Getram Extensions 实 际为 API 接口 ,用户通过该接口开发外部程序调 用 Aimsun2 仿真时的内部数据 ,这些程序可以用 C/ C + + 编写后以动态链接库 (DLL) 的形式调用 或直接用 Python 脚本语言编写 。
由于 Paramics 本身仅提供 API 函数 ,而不提 供现成的程序插件 ,编写插件的工作完全由用户 自己完成 ,因此用户需熟悉数百个 API 函数 ,并能 够熟练地用 C 语言编程 。然而这同时也是 Param2 ics 的优势所在 ,通过 API 函数可以灵活地实现许 多 ITS 技术的模拟 ,充分实现研究者的意图 。
关键词 智能交通系统模拟 ;微观交通仿真 ;Paramics ;Aimsun2 ;Vissim ;Corsim
Abstract : Microscopic Traffic Simulation is a powerful tool for the research and applications in Intelligent Transportation Systems ( ITS) . In this paper ,four simulation software Paramics ,Vissim ,Aimsun2 and Corsim are selected to investigate their performance on ITS modeling. The methods of modeling ITS using these four soft2 ware are demonstrated firstly and then their performance on ITS modeling is compared item by item. It is con2 cluded that the performance of Paramics and Aimsun2 on ITS modeling is good while Corsim is poor.
VISSIM,PARAMICS,TSIS仿真软件对比分析报告
三大著名的仿真软件〔VISSIM/PARAMICS/TSIS〕比照分析VISSIM仿真系统VISSIM是德国PTV公司开发的微观仿真软件,是一种微观的、以时间为参照、以交通行为模型为根底的仿真系统,主要用于城市和郊区交通的模拟仿真中。
它采用的是一个离散的、随机的、以0.1s为时间步长的微观模型。
车辆的纵向运动采用了基于规如此的算法。
不同驾驶员行为的模拟分为保守型和冒险型。
VISSIM提供了图形化的界面,用2D和3D动画向用户直观显示车辆运动,运用动态交通分配进展路径选择。
VISSIM可以模拟轨道和道路公共交通、自行车交通和行人交通,由仿真获得的交通特征数据可以评估不同的选择方案。
它能够模拟许多城市内和非城市内的交通状况,特别适合模拟各种城市交通控制系统,主要应用有:(1)由车辆激发的信号控制的设计、检验、评价;(2)公交优先方案的通行能力分析和检验;(3)收费设施的分析;(4)匝道控制运营分析;(5)路径诱导和可变信息标志的影响分析;(6)路段、交叉口与整个交通网的通行能力和交通流分析;(7)评估不同的设计规划方案和交通组织方案;(8)评估环形交通;(9)评估收费系统和其他交通服务设施;(10)评估智能交通系统的效果(如路径选择系统);(11)大型公交车站的功能分析:(12)复杂交通设施各种运行方式的优化设计(如信号灯控制的路口和无信号灯控制的路口的组合和协调);(13)信号灯控制程序的设计和优化:(14)设计公交优先系统;(15)2D和3D模拟结果的动态演示等。
在VISSIM模型中,信号灯控制程序可以在定时控制或者感应式信号程序方式下进展模拟。
在信号控制程序的模拟时,西门子、飞利浦、PTV、BASEL等公司的产品都可以与之兼容。
VISSIM仿真系统中,对于交通流和信号控制之间有一个接口,通过这个接口可以在检测器数据和信号灯控制参数之间进展数据交换。
仿真结果可以是视窗动态交通流演示,或者是最后输出多种重要交通参数的数据表格。
基于VISSIM的微观交通仿真模型参数标定研究
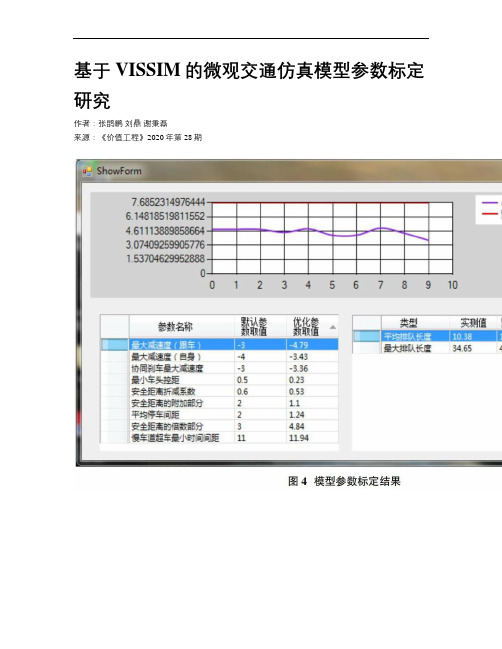
基于VISSIM的微观交通仿真模型参数标定研究作者:张鹍鹏刘鼎谢秉磊来源:《价值工程》2020年第28期摘要:在仿真软件进行交通仿真之前,必需进行模型参数的标定,以提升交通模型的适用性和交通仿真的准确性。
目前国内应用的主流交通仿真软件大多依托于国外交通特性开发,不能充分适用于我国实际交通运行特征。
在已有研究的基础上,本文借助VISSIM COM接口,以排队长度、最大排队长度、旅行时间、出行延误为评价指标,借助遗传算法的智能寻优功能,利用C#语言开发了模型参数标定工具,实现了29种模型参数的自由组合以及自动化和便捷化标定,并且用深圳市实际案例验证了模型算法的有效性。
本研究提供了一套通用性强、操作便捷的模型标定方法,可为实际模型标定工作提供支持。
Abstract: It is necessary to calibrate parameters to improve the applicability of traffic models and accuracy of traffic simulation before conduction of the traffic simulation. At present, most of traffic simulation software applied in China is mostly developed by the foreign traffic characteristics, but it cannot adapt to the actual traffic operation characteristics of China. On the basis of the existing researches, with the help of VISSIM COM interface, this paper takes the queuing length, maximum queuing length, travel time and travel delay as the evaluation indexes,and uses the intelligent optimization function of genetic algorithm. Then the calibration tool of modelparameters is developed by using C# language, which realizes the automatic and convenient calibration of 29 model parameters. The model algorithm is verified by the actual case in Shenzhen. This study provides a set of universal and convenient calibration method for driving behavior model,which can provide support for the actual model calibration work.關键词:交通仿真;VISSIM;参数标定;遗传算法;标定工具Key words: traffic simulation;VISSIM;parameter calibration;genetic algorithm;calibration tool中图分类号:U491;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; 文献标识码:A;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; 文章编号:1006-4311(2020)28-0189-050; 引言在实际重大工程建设、片区交通改善、重点活动交通组织等项目中,常利用Vissim、Tansmodeler、PARAMICS等微观交通仿真软件进行方案评估,旨在对方案实施前后的效果、交通影响进行量化分析,辅助比选设计方案,以提升决策的科学性。
基于VISSIM的车辆跟驰行为参数分析

基于VISSIM的车辆跟驰行为参数分析0 引言随着城市交通拥堵问题日趋严重,人们逐渐从交通流的方面去探索拥堵问题的根源。
然而驾驶人的驾驶行为是直接影响到交通流的,而跟驰行为在驾驶行为中又起着关键性的作用。
跟驰行为是微观交通流中最基本的交通行为之一,车辆跟驰行为中相关参数的不同会导致车辆的延误、行驶损失时间以及排队长度的变化,从而影响行车效率。
故本文根据车辆跟驰模型理论,对车辆跟驰行为中的参数进行了总结,然后在VISSIM跟车模型仿真中改变其相关参数范围,得到不同参数下车辆的延误等数据,从而得出参数变化对车辆跟驰行为的影响程度。
1车辆跟驰模型理论本文介绍的是跟驰模型中最常见的线性跟驰模型和非线性跟驰模型,除此之外,还有VISSIM中Wiedemann跟车模型所基于的生理——心理模型的分析。
(1)线性跟驰模型线性跟驰模型的如下所示,式中第n+1号车在t+T时刻的速度可用下式表示:式1式中:——在t时刻,第n号车(引导车)的位置;——在t时刻,第n+1号车(跟随车)的位置;——反应灵敏度系数(1/s);L——在堵塞情况下的车头间距。
(2)非线性跟驰模型由于在实际情况下,驾驶员在车辆间距较小的情况相对于车辆间距较大的情况更紧张,反应强度也会更大。
为了考虑这一因素,反应灵敏度系数并非常量,而是与车头间距成反比的,由此得到非线性跟驰模型:式2式中:——比例常数;分母即为车头间距。
(3)生理——心理模型生理——心理模型即是驾驶员通过分析视野中前车尺寸的变化感知前后车相对速度的变化,根据公认的感知阈值,选择适当的操作使对相对速度的感知不超过这个值,生理-心理模型是一种跟驰决策模型。
生理——心理模型从建模方法上更接近实际情况,也最能描述大多数日常所见的驾驶行为,所以这种模型及其衍生的各种模型已经应用于许多交通实践中,比如VISSIM仿真中的Wiedemann跟车行为模型,也就是接下来进行驾驶行为仿真所用到的跟车模型。
车联网仿真环境搭建
交通科技与管理1智慧交通与信息技术1 意义 车联网(IoV,Internet of Vehicle)是一种基于多人、多机、多车、环境协同的可控、可管、可运营、可信的开放的融合网络系统,它采用先进的信息通信与处理技术,对人、车、通信网络和道路交通基础设施等环境元素的大规模复杂的静态/动态信息进行感知、认知、传输和计算,解决泛在异构移动网络环境下智能管理和信息服务的可计算性、可扩展性和可持续性问题,最终实现人、车、路、环境的深度融合。
车联网随着自动驾驶、群智感知技术正逐渐被大家所认知。
车联网领域的很多内容仍然处于探索阶段中,大量的理论需要实验进行反复验证,通过对仿真结果的分析以验证理论的正确性和合理性。
但在真实的环境中,完成基于真实车辆、真实场景的有效实验不仅难度大,而且验证成本非常高。
因此,利用计算机的模拟而实现的仿真技术是现阶段验证和研究车联网理论的重要手段。
2 交通模型 交通模型可以分为宏观交通仿真模型、微观交通仿真模型和中观交通仿真模型。
宏观交通仿真模型对系统实体、行为及其相互作用的描述非常粗略,仿真速度快,对计算机资源的要求较低。
它采用集合方式来展现交通流,如交通流量、速度、密度及它们之间的关系。
宏观模型很少考虑车流内车辆之间的相互作用,如车辆跟驰、车道变换,不考虑个别车辆的运动。
宏观交通仿真模型比微观仿真模型的精度低,适于描述系统的总体特性,并试图通过反映系统中的所有个体特性来反映系统的总体特性。
宏观仿真模型的重要参数是速度、密度和流量。
微观交通仿真模型很细致地描述系统实体及其相互作用,对计算资源的要求较高。
微观交通仿真模型把每辆车作为一个研究对象。
对所有个体车辆都进行标识和定位,在仿真方法上不同于宏观交通仿真。
在每一时段,车辆的速度、加速度及其他车辆特性被实时更新。
微观仿真的基本模型包括跟驰模型、超车模型及车道变换模型。
微观水平的车道变换不仅涉及到当前车道中本车对前车的跟驰模型,而且涉及到目标车道的假定前车和后车的跟驰模型,还可以精细地模拟驾驶员决策行为,能灵活地反映出各种道路和交通条件的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VISSIMPARAMICSTSIS仿真软件对比分析VISSIM是由德国PTV公司开发的一款微观交通仿真软件。
它采用基
于车辆驱动的交通仿真原理,可以模拟车辆的行为、交通信号灯的控制以
及道路设施等。
VISSIM可以进行各种规模交通网络的建模和仿真分析,
包括城市道路、高速公路和公交系统等。
它具有用户友好的界面、灵活的
参数设置和可视化的仿真结果展示。
VISSIM可以用于交通信号优化、交
通管理策略评估等方面的研究。
PARAMICS是由英国Quadstone公司开发的一款微观交通仿真软件。
它以基于代理的仿真方法为基础,即将每个车辆视为一个独立的个体,通
过模拟车辆之间的相互影响以及车辆与道路设施之间的交互,来预测交通
流量和交通拥堵情况。
PARAMICS具有较高的仿真精度和计算效率,适用
于大规模交通网络的建模和仿真,包括城市交通、高速公路和港口码头等。
PARAMICS还可以进行事件驱动和实时仿真,并支持多模态的交通仿真。
TSIS(Transportation Analysis Simulation System)是美国联邦
公路管理局(FHWA)开发的一款交通仿真软件。
它是一种宏观交通仿真软件,用于分析长期和短期的交通规划和运营管理问题。
TSIS可以进行交
通需求估计、交通模式选择和交通预测等方面的仿真分析。
它包括多个模块,如旅行需求模型、传播模型和路网模型等,可以模拟不同交通模式的
行为和交通流量的分布情况。
TSIS适用于交通规划和政策制定等领域的
研究。
综上所述,VISSIM、PARAMICS和TSIS都是常用的交通仿真软件,但
它们在仿真原理、适用范围和功能特点上有所区别。
VISSIM适用于微观
交通仿真,重点模拟车辆的行为和交通信号灯的控制;PARAMICS适用于
大规模交通网络的仿真,具有高精度和高效率的特点;TSIS适用于宏观
交通仿真,注重长期和短期的交通规划和运营管理问题。
根据研究的目的和需求,可以选择合适的仿真软件来进行交通分析和决策。