控制系统的MATLAB仿真
控制系统MATLAB仿真基础
系统仿真§ 4.1控制系统的数学模型1、传递函数模型(tranfer function)2、零极点增益模型(zero-pole-gain)3、状态空间模型(state-space)4、动态结构图(Simulink结构图)一、传递函数模型(transfer fcn-----tf)1、传递函数模型的形式传函定义:在零初始条件下,系统输出量的拉氏变换C(S)与输入量的拉氏变换R(S)之比。
C(S) b1S m+b2S m-1+…+b mG(S)=----------- =- --------------------------------R(S) a1S n + a2S n-1 +…+ a nnum(S)= ------------den(S)2、在MATLAB命令中的输入形式在MATLAB环境中,可直接用分子分母多项式系数构成的两个向量num、den表示系统: num = [b1, b2, ..., b m];den = [a1, a2, ..., a n];注:1)将系统的分子分母多项式的系数按降幂的方式以向量的形式输入两个变量,中间缺项的用0补齐,不能遗漏。
2)num、den是任意两个变量名,用户可以用其他任意的变量名来输入系数向量。
3)当系统种含有几个传函时,输入MATLAB命令状态下可用n1,d1;n2,d2…….。
4)给变量num,den赋值时用的是方括号;方括号内每个系数分隔开用空格或逗号;num,den方括号间用的是分号。
3、函数命令tf( )在MATLAB中,用函数命令tf( )来建立控制系统的传函模型,或者将零极点增益模型、状态空间模型转换为传函模型。
tf( )函数命令的调用格式为:圆括号中的逗号不能用空格来代替sys = tf ( num, den ) [G= tf ( num, den )]其中,函数的返回变量sys或G 为连续系统的传函模型;函数输入参量num和den分别为系统的分子分母多项式的系数向量。
控制系统MATLAB仿真2-根轨迹仿真
Gk ( s)
k g ( s 0.5) s( s 1)( s 2)( s 5)
绘制系统的根轨迹,确定当系统稳定时,参数kg 的取值范围。 num=[1 0.5]; den=conv([1 3 2],[1 5 0]); G=tf(num,den); K=0:0.05:200; rlocus(G,K) [K,POLES]= rlocfind(G) figure(2) Kg=95; t=0:0.05:10; G0=feedback(tf(Kg*num,den),1); step(G0,t)
Root Locus 8
8 6 4 2 0 -2 -4 -6 -8 -8 x x x
6
4
2
Imaginary Axis
0
-2
-4
-6
-8 -8
-6
-4
-2
0 Real Axis
2
4
6
8
-6
-4
-2
0
2
4
6
8
(a) 直接绘制根轨迹
(b) 返回参数间接绘制根轨迹
图1 例1系统根轨迹
二、MATLAB根轨迹分析实例
用户可以通过Control Architecture窗口进行系 统模型的修改,如图9。
图9 rltool工具Control Architecture窗口
也可通过System Data窗口为不同环节导入已 有模型,如图10。
图10 rltool工具System Data窗口
可以通过Compensator Editor的快捷菜单进行 校正环节参数的修改,如增加或删除零极点、 增加超前或滞后校正环节等,如图11。
Step Response 2 1.8 1.6 1.4 1.2
利用Matlab进行控制系统仿真和性能评估

利用Matlab进行控制系统仿真和性能评估控制系统是现代工程中不可或缺的一部分,它在各个行业中扮演着至关重要的角色。
控制系统的设计和优化需要经过一系列的仿真和性能评估,以确保系统能够稳定运行,并满足设计要求。
Matlab作为一种强大的技术计算工具,在控制系统仿真和性能评估方面发挥着重要作用。
首先,我们需要了解控制系统的基本概念和设计原理。
控制系统是一个由控制器、被控对象和反馈回路组成的系统。
其中,控制器根据需要对被控对象进行控制,而反馈回路可以获取系统的状态信息并进行修正,以保持系统的稳定性。
控制系统的设计需要考虑到系统的动态特性、稳定性、鲁棒性等多个方面。
在Matlab中,我们可以使用Simulink工具箱来进行控制系统的仿真和性能评估。
Simulink是一个图形化的建模和仿真环境,它允许用户通过拖拽和连接不同的组件来构建系统模型。
通过在Simulink中建立控制系统的模型,我们可以更直观地理解系统的结构和工作原理。
在进行仿真之前,我们需要确定系统的数学模型。
数学模型是描述系统动态特性的数学方程,它可以是线性的或非线性的。
对于线性系统,我们可以使用传递函数或状态空间模型来描述;对于非线性系统,我们可以使用差分方程或微分方程来描述。
在Matlab中,我们可以使用tf、ss、zpk等函数来创建和操作这些模型。
一旦建立了系统的数学模型,我们就可以开始进行仿真了。
仿真可以帮助我们预测系统的行为,分析系统的稳定性和性能,并根据需要进行参数优化。
在Simulink中,我们可以使用不同的仿真方法和工具来模拟系统的动态响应。
例如,我们可以使用蒙特卡洛方法来生成随机的输入信号,以测试系统对不同输入的响应;我们还可以使用频域分析工具来研究系统的频率响应特性。
在仿真的过程中,我们还可以对系统进行性能评估。
性能评估可以帮助我们了解系统的控制效果,评估系统是否满足设计要求,并提供改进系统性能的指导。
在Matlab中,我们可以使用各种指标来评估系统的性能,如稳定度、响应速度、超调量等。
实验报告基于Matlab的控制系统仿真1

实验一 基于Matlab 的控制系统模型姓名 学号 班级机械一、实验目的1) 熟悉Matlab 的使用环境,学习Matlab 软件的使用方法和简单编程方法。
2) 学习使用Matlab 软件进行拉氏变换和拉式反变换的方法。
3) 学习使用Matlab 软件建立、转换连续系统数学模型的方法。
4) 学习使用Matlab 软件分析控制系统稳定性的方法。
二、实验原理1. 拉氏变换和反拉氏变换(1) 拉氏变换syms a w tf1=exp(-a*t)laplace(f1)f2=2laplace(f2)f3=t*exp(-a*t)laplace(f3)f4=sin(w*t)laplace(f4)f5=exp(-a*t)*cos(w*t)laplace t-t (f5)(2) 拉氏反变换syms s a wf 1=1/silaplace(f 1)f 2=1/(s+a)ilaplace(f 2)f 3=1/s^2ilaplace(f 3)f 4=w/(s^2+w^2)ilaplace(f 4)f 5=1/(s*(s+2)^2*(s+3))ilaplace(f 5)…2. 控制系统模型的建立和转化传递函数模型:112m 112+()+m m n n nb s b s b num G s den a s a s b --++==++…… 零极点增益模型:1212()()()()()()()m n s z s z s z G s k s p s p s p ---=--- (1) 建立系统传递函数模型22(1)()(2)(3)56s s s s G s s s s s ++==++++ num=[1,1,0]den=[1,5,6]Gs1=tf(num,den)(2) 建立系统的零极点模型z=[0,-1]p=[-2,-3]k=[1]Gs1=zpk(z,p,k)(3) 传递函数模型转化为零极点模型num=[1,1,0]den=[1,5,6]Gs1=tf(num,den)[z,p,k]=tf2zp(num,den)Gs2=zpk(z,p,k)(4) 零极点模型转化为传递函数模型z=[0,-1]p=[-2,-3]k=[1]Gs1=zpk(z,p,k)[num,den]=zp2tf(z',p',k)Gs2=tf(num,den)3. 用Matlab 进行传递函数部分分式展开5434321139+52s+26()1035+50s+241 2.530.5 1s+4s+3s+2s+1num s s s G s den s s s ++==++-=++++num=[1 11 39 52 26]den=[1 10 35 50 24][r,p,k]=residue(num,den)4. 连续系统稳定性分析已知传递函数,试求该系统的闭环极点并判断系统的稳定性。
MATLAB自动控制系统仿真simulink
目录1 绪论 (1)1.1 题目背景、研究意义 (1)1.2 国内外相关研究情况 (1)2 自动控制概述 (3)2.1 自动控制概念 (3)2.2 自动控制系统的分类 (4)2.3 对控制系统的性能要求 (5)2.4 典型环节 (6)3 MATLAB仿真软件的应用 (10)3.1 MATLAB的基本介绍 (10)3.2 MATLAB的仿真 (10)3.3 控制系统的动态仿真 (11)4 自动控制系统仿真 (14)4.1 直线一级倒立摆系统的建模及仿真 (14)4.1.1 系统组成 (14)4.1.2 模型的建立 (14)4.1.3 PID控制器的设计 (20)4.1.4 PID控制器MATLAB仿真 (22)4.2 三容水箱的建模及仿真 (24)4.2.1 建立三容水箱的数学模型 (24)4.2.2 系统校正 (25)总结 (28)致谢 (29)参考文献 (30)1 绪论1.1 题目背景、研究意义MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。
其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。
现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。
随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。
不仅如此,自动控制技术的应用范围现在已扩展到生物、医学、环境、经济管理和其它许多社会生活领域中,成为现代社会生活中不可缺少的一部分。
随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,自动控制理论和技术必将进一步发挥更加重要的作用。
作为一个工程技术人员,了解和掌握自动控制的有关知识是十分必要的。
自动控制技术的应用不仅使生产过程实现了自动化,极大地提高了劳动生产率,而且减轻了人的劳动强度。
自动控制原理MATLAB仿真实验(于海春)
自动控制原理MATLAB仿真实验(于海春)实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入imulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个imulink仿真环境常规模板。
图1-1SIMULINK仿真界面图1-2系统方框图3.在imulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击imulink下的“Continuou”,再将右边窗口中“TranferFen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在imulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的imulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击imulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文目录一、内容概括 (2)1. 研究背景和意义 (3)2. 国内外研究现状 (4)3. 研究目的和内容 (5)二、MATLAB控制系统仿真基础 (7)三、控制系统建模 (8)1. 控制系统模型概述 (10)2. MATLAB建模方法 (11)3. 系统模型的验证与校正 (12)四、控制系统性能分析 (14)1. 稳定性分析 (14)2. 响应性能分析 (16)3. 误差性能分析 (17)五、基于MATLAB控制系统的设计与应用实例分析 (19)1. 控制系统设计要求与方案选择 (20)2. 基于MATLAB的控制系统设计流程 (22)3. 实例一 (23)4. 实例二 (25)六、优化算法在控制系统中的应用及MATLAB实现 (26)1. 优化算法概述及其在控制系统中的应用价值 (28)2. 优化算法介绍及MATLAB实现方法 (29)3. 基于MATLAB的优化算法在控制系统中的实践应用案例及分析对比研究31一、内容概括本论文旨在探讨基于MATLAB控制系统的仿真与应用,通过对控制系统进行深入的理论分析和实际应用研究,提出一种有效的控制系统设计方案,并通过实验验证其正确性和有效性。
本文对控制系统的基本理论进行了详细的阐述,包括控制系统的定义、分类、性能指标以及设计方法。
我们以一个具体的控制系统为例,对其进行分析和设计。
在这个过程中,我们运用MATLAB软件作为主要的仿真工具,对控制系统的稳定性、动态响应、鲁棒性等方面进行了全面的仿真分析。
在完成理论分析和实际设计之后,我们进一步研究了基于MATLAB 的控制系统仿真方法。
通过对仿真模型的建立、仿真参数的选择以及仿真结果的分析,我们提出了一种高效的仿真策略。
我们将所设计的控制系统应用于实际场景中,通过实验数据验证了所提出方案的有效性和可行性。
本论文通过理论与实践相结合的方法,深入探讨了基于MATLAB 控制系统的仿真与应用。
电力拖动自动控制系统Matlab仿真实验报告
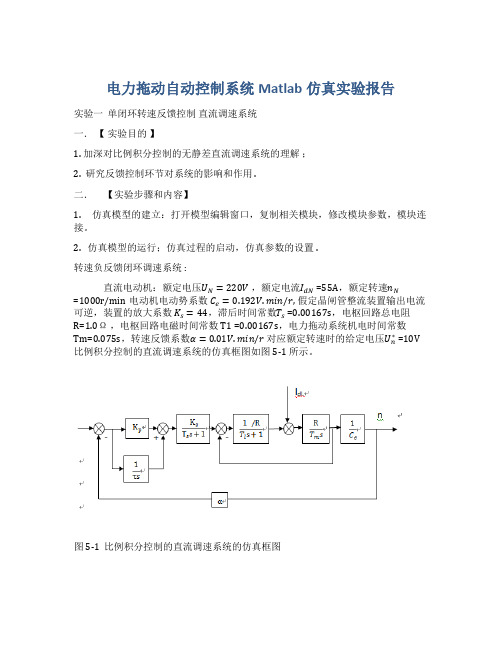
电力拖动自动控制系统Matlab仿真实验报告实验一单闭环转速反馈控制直流调速系统一.【实验目的】1. 加深对比例积分控制的无静差直流调速系统的理解;2. 研究反馈控制环节对系统的影响和作用 .二.【实验步骤和内容】1. 仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2. 仿真模型的运行;仿真过程的启动,仿真参数的设置 .转速负反馈闭环调速系统 :直流电动机:额定电压U N=220V,额定电流I dN =55A,额定转速n N=1000r/min电动机电动势系数C e=0.192V.min/r, 假定晶闸管整流装置输出电流可逆,装置的放大系数K s=44,滞后时间常数T s =0.00167s,电枢回路总电阻R=1.0Ω,电枢回路电磁时间常数T1 =0.00167s,电力拖动系统机电时间常数Tm=0.075s,转速反馈系数α=0.01V.min/r对应额定转速时的给定电压U n∗ =10V 比例积分控制的直流调速系统的仿真框图如图 5-1 所示。
图 5-1 比例积分控制的直流调速系统的仿真框图图 5-2 开环比例控制直流调速系统仿真模型图图 5-3 开环空载启动转速曲线图图 5-4 开环空载启动电流曲线图图 5-5 闭环比例控制直流调速系统仿真模型图在比例控制直流调速系统中,分别设置闭环系统开环放大系数 k=0.56 , 2.5, 30 ,观察转速曲线图,随着 K 值的增加,稳态速降减小,但当 K 值大于临界值时,系统将发生震荡并失去稳定,所以 K 值的设定要小于临界值。
当电机空载启动稳定运行后,加负载时转速下降到另一状态下运行,电流上升也随之上升。
图 5-6 k=0.56 转速曲线图图 5-7 k=0.56 电流曲线图图 5-8 k= 2.5 转速曲线图图 5-9 k= 30 转速曲线图图 5-10 闭环比例积分控制直流调速系统仿真模型图图 5-11 PI 控制转速 n 曲线图图 5-12 PI 控制电流曲线图在闭环比例积分( PI )控制下,可以实现对系统无静差调节,即, 提高了系统的稳定性。