《六足仿生机器人》PPT课件
最新仿生机器人课件幻灯片

8.2.2 仿生机器人关键技术问题
1 建模问题
仿生机器人的运动具有高度的灵活性和适应性,其一般都是 冗余度或超冗余度机器人,结构复杂。运动学和动力学模型 与常规机器人有很大差别,且复杂程度更大。
2 控制优化问题
机器人的自由度越多,机构越复杂,必将导致控制系统的复 杂化。复杂巨系统的实现不能全靠子系统的堆积,要做到 “整体大于组分之和”,同时要研究高效优化的控制算法才 能使系统具有实时处理能力。
4 鲹科类模式鱼体波模型建立及分析
根据对鲹科模式鱼类游动的仿生研究及图像分析,得到的鱼体波 特征为一波幅逐渐加大、由头部至尾鳍传播的行波。鱼体波曲线 可通过鱼体波波幅包络线与正弦曲线的合成来进行数学描述:
yb o d y(x,t)(c 1xc2x2)sin (kxt)
式中 ybody (—x,—t) 身体横向位移; c1 —— 尾流宽度,通常以尾鳍摆幅近似表示;
8.3.2仿生机器鱼的设计
机器鱼是一个复杂的机器人系统,包括机械传动和机电控 制两大部分,其中机械系统犹如整个系统的躯体,控制系 统犹如整个系统的大脑和神经中枢。因此,它必须具有运 动灵活、传动精密的机械本体,结构合理、高效运作的控 制系统,以及运算高速、工作可靠的硬件平台。
1 几种典型机械鱼机构分析
一个摆动周期产生反卡门涡街的过程
(a) 尾鳍先以摆动造成一个大涡流; (b) 迅速的顶端摆动造成一个相反方向的涡流; (c) 下摆之后的尾鳍使两个涡流相遇; (d) 相供的两个涡流形成一柱强力的向后喷流,并相互减弱其涡流 强度。
表示尾流反卡门涡街的参数是斯特劳哈尔数St(Strouhal Number )。对于BCF推进方式,斯特劳哈尔数定义为:
l六足昆虫机器人机械原理
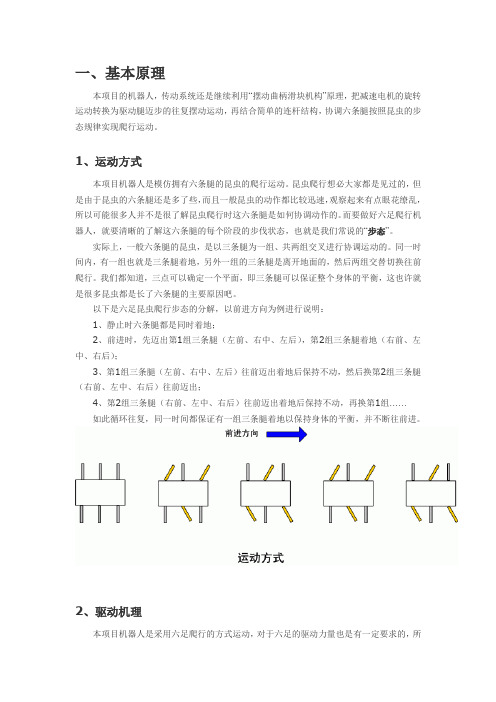
一、基本原理本项目的机器人,传动系统还是继续利用“摆动曲柄滑块机构”原理,把减速电机的旋转运动转换为驱动腿迈步的往复摆动运动,再结合简单的连杆结构,协调六条腿按照昆虫的步态规律实现爬行运动。
1、运动方式本项目机器人是模仿拥有六条腿的昆虫的爬行运动。
昆虫爬行想必大家都是见过的,但是由于昆虫的六条腿还是多了些,而且一般昆虫的动作都比较迅速,观察起来有点眼花缭乱,所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。
而要做好六足爬行机器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的“步态”。
实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。
同一时间内,有一组也就是三条腿着地,另外一组的三条腿是离开地面的,然后两组交替切换往前爬行。
我们都知道,三点可以确定一个平面,即三条腿可以保证整个身体的平衡,这也许就是很多昆虫都是长了六条腿的主要原因吧。
以下是六足昆虫爬行步态的分解,以前进方向为例进行说明:1、静止时六条腿都是同时着地;2、前进时,先迈出第1组三条腿(左前、右中、左后),第2组三条腿着地(右前、左中、右后);3、第1组三条腿(左前、右中、左后)往前迈出着地后保持不动,然后换第2组三条腿(右前、左中、右后)往前迈出;4、第2组三条腿(右前、左中、右后)往前迈出着地后保持不动,再换第1组……如此循环往复,同一时间都保证有一组三条腿着地以保持身体的平衡,并不断往前进。
2、驱动机理本项目机器人是采用六足爬行的方式运动,对于六足的驱动力量也是有一定要求的,所以与前几个仿生类机器人项目一样都是借助减速电机所具有的“低转速、高扭矩”的特性来实现的。
与PVC-Robot 11号、PVC-Robot 12号机器人驱动双臂以及与PVC-Robot 13号驱动双足类似,本项目机器人六足中的中间两足是主动足,是由减速电机直接驱动的,而采用的减速电机同样也必须要满足两个条件:1、拥有足够的动力,能够支撑双足行走;2、减速电机左右两侧同轴输出。
机器人等级考试搭建-六足步行机器人

第11章六足步行机器人仿生六足机器人又叫蜘蛛机器人,顾名思义,六足机器人架构中惜鉴了自然界中昆虫的行走方式,是多足机器人的一种。
11.1探索六足的行走方式是多样的,其中最典型的行走方式就是模仿六足纲昆虫的三角步态。
图 11.1六足步行机器人三角步态是什么样子呢?六足昆虫行走时,一般不是六足同时直线爬行,而是将三对足分成两组,每组三只足,以三角形支架结构交替前进,如图11.2所示。
分组情况是这样的:身体左侧的前后、足及右侧的屮足为一组,右侧的前足、后足和左侧的中足为另一组,分别组成两个三角形支架。
行走时接触地而的腿如绿方块所示,形成稳定的三角结构,这样模型通常会保持直立平稳的走姿而不会走路时跌跟头了。
这种六足机器人控制简单,不过动作单一,因为他的毎个关节都是通过机械连接完成,最后由一个统一的动力源控制。
另外,我们还能看到很多杂的六足机器人每一个关节都足分开控制的。
参照关节类动物的运动形式,这个六足机器人的每条腿的关节都是相对独立的,每个关节都是用180度的舵机来实现的,每条腿上三个关节,对应就是3个舵机,六条腿就是18个舵机。
不过这种用18个舵机支搾起来的机器人控制复杂,对电源的要求太高,还需要通过程序来控制,调试时间长。
我们综合以上的知识内容,制作一个六足移动机器人,即保证了机器人的控制苟单,也能实现机器人前后左心、左转右转的移动效果。
11.2制作7倍10倍这里要注意的是2倍的梁圆孔部分要朝上,和对面的正好相反10倍和12倍11.3六足运动方式六足机器人的运动方式为三角步态,上面我们简单介绍过,三角步态就是六足机器人的六只足分成了两组,组成了两个三角支架。
当一组三角形支架所有的足同时提起,另一机三角形的足原地不动,支撑身体并以中足为支点。
这一组的三脚架抬起到下落的过程中,前肢的构件向前迈进拉动身体向前,后足的构件将机器人向前推。
这一组落地,另一组的三只足抬起,重心落在这一组三角形支架的三足上,然后重复前—组的动作,之后互相轮换周而复始。
仿生蚂蚁机器人
智能除草
02
通过识别杂草和作物,仿生蚂蚁机器人能够进行智能除草,减
少农药使用,保障食品安全。
监测作物生长
03
仿生蚂蚁机器人可以实时监测作物的生长情况,为农民提供科
学种植的依据,提高农业产量。
结论
06
对仿生蚂蚁机器人的总结评价
创新性
仿生蚂蚁机器人采用了独特的生物启发设计,具有高度的创新性。它不仅在形态上模仿了 真实蚂蚁的外形和运动方式,还在功能上实现了类似蚂蚁的协同工作能力,充分展现了仿 生机器人的潜力。
中央处理器
仿生蚂蚁机器人配备有微型中央处理器,负责处理感知系统获取 的信息,并控制机器人的运动系统。
存储器
仿生蚂蚁机器人内置存储器,用于存储程序、算法和数据,以便在 断电或重启后快速恢复工作状态。
无线通信模块
仿生蚂蚁机器人通过无线通信模块与外部控制器进行通信,实现远 程控制和数据传输。
仿生蚂蚁机器人的
仿生蚂蚁机器人的运动系统
微型电机驱动
自适应步态调整
仿生蚂蚁机器人的运动系统由微型电 机驱动,能够实现快速、灵活的移动 。
仿生蚂蚁机器人能够根据环境变化自 适应调整步态,以最优方式移动。
多关节结构设计
仿生蚂蚁机器人采用多关节结构设计 ,使其能够模拟蚂蚁的爬行方式,适 应各种复杂地形和环境。
仿生蚂蚁机器人的信息处理与控制系统
高度的隐蔽性和灵活性。
仿生蚂蚁机器人的
02
设计
仿生蚂蚁机器人的外观设计
外观形态
仿照真实蚂蚁的外观形态,具有 六足、身体和头部等基本结构特
征。
颜色与纹理
采用与真实蚂蚁相似的颜色和纹理 ,以提高机器人的隐蔽性和仿真度 。
尺寸比例
仿生机器人概论PPT课件
2021/5/5
✓按照其驱动方式主要分为:压电 晶体式(PZT)微小型机器鱼、 永磁体式(NdFeB)微小型机器 鱼、离子交换聚合体膜式(ICPF 或 IPMC)微小型机器鱼、介电 弹性体式(ANTLA)微小型机器 鱼、形状记忆合金式(SMA)微 小 型 机 器 鱼 和 超 磁 致 伸第缩9页材/共料19页式
利用躯干部和尾部肌肉(大侧肌)的交替伸缩,使身体左右扭动屈 曲前 进即通过身体的波动和尾鳍的摆动产生推进力。
2021/5/5
四种BCF模式
第5页/共19页
二. 仿生机器鱼推进机理
1.鱼类游动机理
b.中间鳍、对鳍推进模式(MPF Model)
主要依靠胸鳍或腹鳍的摆动产生推进力,一般为辅助推进模式, 但对于而鳐科模式(Rajiform) 、刺鲀科模式(Diodontiform)的 鱼类MPF则为主要的推进方式。
娱乐方面
第2页/共19页
一. 仿生机器鱼概述
3.仿生机器鱼特点
与传统螺旋桨水中推进器比较,仿生机器鱼有以下优点 ✓推进效率高:可以达到80%以上,螺旋桨推进只有 40%~50% ✓机动性好:转弯半径只有体长10%~30% ✓噪音低 ✓对环境扰动小
2021/5/5
第3页/共19页
二. 仿生机器鱼推进机理
27(6):518-519. 【13】王扬威,王振龙,李健,杭观荣. 形状记忆合金驱动仿生蝠鲼机器鱼的设计【J】.机器人,
2010 32(2):256-260.
2021/5/5
第17页/共19页
2021/5/5
谢谢!
欢迎批评指正
第18页/共19页
新型六足机器人
目录1 引言1.1新型六足机器人研究目的和意义 (1)1.2新型六足机器人研究概况及发展趋势 (1)1.3课题研究内容 (2)2 机械结构与芯片简介2.1机器人机械结构 (3)2.2机器人运动原理 (3)2.3驱动装置选择 (5)2.4机器人实物图 (6)2.5硬件结构介绍 (7)2.6单片机芯片介绍 (8)2.7编码解码芯片介绍 (13)3 控制系统结构设计3.1上位机控制 (16)3.1.1 程序语言及串口通讯 (16)3.1.2 人机交互界面 (17)3.2 基于无线的智能控制 (19)3.2.1 无线发射模块 (19)3.2.2 无线接收模块 (23)4 结论 (29)参考文献 (30)致谢 (31)新型六足机器人1 引言1.1新型六足机器人研究目的和意义本文六足机器人是一种基于仿生学原理研制开发的新型足式机器人。
新型机器人比传统的轮式机器人有更好的移动性,它采用类拟生物的爬行机构进行运动,自动化程度高,具有丰富的动力学特性。
此外,足式机器人相比其它机器人具有更多的优点:它可以较易地跨过比较大的障碍(如沟、坎等),并且机器人足所具有的大量的自由度可以使机器人的运动更加灵活,对凹凸不平的地形的适应能力更强;足式机器人的立足点是离散的,跟地面的接触面积较小,因而可以在可达到的地面上选择最优支撑点,即使在表面极度不规则的情况下,通过严格选择足的支撑点,也能够行走自如。
因此,足式步行机器人的研究已成为机器人学中一个引人注目的研究领域,由于六足机器人强大的运动能力,可以提供给运动学、仿生学和机械构造原理研究有力的工具[1]。
在研究昆虫运动方式、关节承力、稳定姿态调整的过程中,可以运用本机器人对设想的虫体姿态、运动过程进行模拟,最大程度地接近真实,将理论和实践联系起来,从而更好地观察昆虫运动模式的优点,以及探究哪些现象能够运用到机械设计的实践中去。
这对于以上学科的研究和探索都是十分有意义的。
当然,我们还可以作为教学器械,通过研究昆虫爬行时各脚的运动情况,用机械形式表达出来,也可以作为仿生玩具及探险、搜救设备,还可以进入细小管道、地洞中勘察。
仿生机器人技术简介.PPT文档79页
35、不要以为自己成功一次就可以了 ,也不 要以为 过去的 光荣可 以被永 远肯定 。
31、只有永远躺在泥坑里的人,才不会再掉进坑里。——黑格尔 32、希望的灯一旦熄灭,生活刹那间变成了一片黑暗。——普列姆昌德 33、希望是人生的乳母。——科策布 34、形成天才的决定因素应该是勤奋。——郭沫若 35、学到很多东西的诀窍,就是一下子不要学很多。——洛克
Hale Waihona Puke 仿生机器人技术简介.31、别人笑我太疯癫,我笑他人看不 穿。(名 言网) 32、我不想听失意者的哭泣,抱怨者 的牢骚 ,这是 羊群中 的瘟疫 ,我不 能被它 传染。 我要尽 量避免 绝望, 辛勤耕 耘,忍 受苦楚 。我一 试再试 ,争取 每天的 成功, 避免以 失败收 常在别 人停滞 不前时 ,我继 续拼搏 。
仿生机器人技术简介.79页PPT
6、露凝 Nhomakorabea无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
谢谢你的阅读
❖ 知识就是财富 ❖ 丰富你的人生
71、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 75、内外相应,言行相称。——韩非
文 家 。汉 族 ,东 晋 浔阳 柴桑 人 (今 江西 九江 ) 。曾 做过 几 年小 官, 后辞 官 回家 ,从 此 隐居 ,田 园生 活 是陶 渊明 诗 的主 要题 材, 相 关作 品有 《饮 酒 》 、 《 归 园 田 居 》 、 《 桃花 源 记 》 、 《 五 柳先 生 传 》 、 《 归 去来 兮 辞 》 等 。