大滞后控制系统
大滞后系统的复合控制

大滞后系统的复合控制
杨为民
【期刊名称】《青岛科技大学学报(自然科学版)》
【年(卷),期】2005(026)005
【摘要】针对大滞后系统滞后时间长,变数及非线性等特性,利用分布参数理论,提出了一类新的前馈加反馈识别校正的复合控制方案,并通过对换热器的实时控制实验和比较,证明它较常用的以集中参数线性理论为基础的控制方案优越.
【总页数】4页(P436-439)
【作者】杨为民
【作者单位】青岛科技大学,自动化与电子工程学院,山东,青岛,266042
【正文语种】中文
【中图分类】TP1.15
【相关文献】
1.大滞后系统控制算法在再热汽温系统中的应用 [J], 李遵基
2.大滞后系统综合控制及其在焦炉鼓冷系统中的应用 [J], 张世峰;金科
3.一类非线性大滞后系统自适应积分滑模控制 [J], 侯明冬;王印松
4.PID+前馈控制在固井水泥车混浆系统等大滞后控制系统中的应用 [J], 王恺; 张磊
5.针对大滞后系统的改进内模控制算法研究 [J], 王文标;刘青震;汪思源;任冠企因版权原因,仅展示原文概要,查看原文内容请购买。
大滞后系统控制方法
大滞后系统控制方法
大滞后系统控制可有点小麻烦呢。
你想啊,就像你喊一个人,结果他过了老半天才有反应,这多让人着急。
那对于这种大滞后系统,有一种预测控制方法。
这就好比你要去赶火车,你知道火车啥时候开,路上大概会堵多久,那你就能提前规划好出门时间。
预测控制就是这么个道理,它根据系统的模型,去预测未来的输出,然后提前调整控制量。
比如说在一些化工生产里,从原料投入到产品出来可能有很长的滞后,通过预测控制就能提前调整进料量、温度这些参数,让最后的产品质量啥的都能符合要求。
还有一种方法是史密斯预估器。
这个东西可神奇啦,它就像是给这个滞后系统找了个替身。
它把这个滞后环节单独拎出来,然后通过一个预估模型,让控制器看到如果没有滞后的话系统应该是什么样的反应。
这样控制器就不会被滞后给搞晕头转向啦。
打个比方,就像你在玩一个有延迟的游戏,这个预估器就像是告诉你,要是没有这个网络延迟,你的操作应该会有什么样的结果,然后你就能更好地玩游戏啦。
模糊控制也能在大滞后系统里发挥作用哦。
模糊控制就不那么死板,它不是说精确地算出一个数值来控制。
就像你做菜的时候,你不会精确到放多少克盐,而是根据感觉,大概、差不多就行。
模糊控制对于大滞后系统,就是根据一些模糊的规则,比如“如果偏差大而且变化快,那就大幅度调整控制量”这种感觉的规则。
因为大滞后系统很难精确建模,模糊控制这种有点“随性”的方法有时候反而能取得不错的效果呢。
大滞后系统控制虽然有点难搞,但有了这些方法,就像给我们在黑暗中摸索的人点亮了一盏盏小灯,让我们能更好地驾驭这些“反应慢半拍”的系统啦。
《基于PLC的面向加热水箱大滞后系统控制算法实现与优化》范文

《基于PLC的面向加热水箱大滞后系统控制算法实现与优化》篇一一、引言随着工业自动化技术的快速发展,可编程逻辑控制器(PLC)在工业控制系统中扮演着越来越重要的角色。
然而,对于加热水箱这类大滞后系统,传统的控制算法往往难以实现精确和稳定的控制。
因此,本文将探讨基于PLC的面向加热水箱大滞后系统的控制算法实现与优化,以期提高系统的控制精度和稳定性。
二、问题背景及研究意义加热水箱系统由于其固有的大滞后特性,常常导致温度控制不稳定,影响了生产效率和产品质量。
传统的PID控制算法虽然简单易行,但对于大滞后系统往往难以达到理想的控制效果。
因此,研究基于PLC的面向加热水箱大滞后系统的控制算法实现与优化,对于提高工业生产效率和产品质量具有重要意义。
三、相关技术综述在控制算法领域,针对大滞后系统的控制方法主要包括预测控制、模糊控制、神经网络控制等。
其中,预测控制通过建立系统模型,对未来输出进行预测,从而实现对系统的精确控制;模糊控制则利用模糊逻辑对系统进行控制,具有较强的鲁棒性;神经网络控制则通过模拟人脑神经网络的工作方式,实现对系统的自适应控制。
这些方法在加热水箱大滞后系统的控制中均有应用,但各有优缺点。
四、基于PLC的控制算法实现本文提出一种基于PLC的预测控制算法,实现对加热水箱大滞后系统的精确控制。
该算法通过建立系统的数学模型,预测未来一段时间内的温度变化趋势,并根据预测结果调整加热功率,从而实现精确的温度控制。
在实现过程中,我们采用了PLC的编程语言进行算法编写和调试,确保了算法的可靠性和稳定性。
五、算法优化及实验结果分析为了进一步提高算法的控制精度和稳定性,我们采用了多种优化措施。
首先,我们对系统模型进行精确的辨识和优化,提高了模型的预测精度。
其次,我们引入了自适应调节机制,根据系统实际运行情况动态调整算法参数,以适应不同工况下的控制需求。
最后,我们采用了鲁棒性较强的模糊逻辑对算法进行优化,提高了算法的鲁棒性和抗干扰能力。
基于PID控制的温度大滞后系统算法研究

文献 标志码 : A
文章 编号 :0 40 6 ( O 1 0 一 18O 1 0— 3 6 2 1 ) 1O 1一4
Re e r h o r e Ti e d l y Te s a c fLa g m - e a mpe a u e c n r li r t r - o t o lng S s e s d o D nt o g r t y t m Ba e n PI Co r lAl o ihm
第2 3卷 第 1 期 21 0 1年 3月
甘 肃 科 学 学 报
J u n lo n uS in e o r a fGa s ce c s
V0 . 3 No 1 12 . M a. 0 1 r2 1
基 于 P D控 制 的温 度大滞 后 系统 算 法 研 究 I
林 辉 常继 彬 ,
具有 时变 、 扰 动 、 大 纯滞 后 、 以建 立精 确 的数 学 模 难 型等 特性 , 往作 为大滞后 系统 的典型代 表. 具有 往 而
( . 安 铁路 职 业 技 术 学 院 , 西 西 安 1西 陕 70 1 ;. 庆 科技 学 院 , 庆 1 0 42 重 重 4 13 ) 0 制 系统 的大滞后 特点 , 采用 S t mi h预估控制 算 法进 行控制 , 此基础上提 出 了 在
种 改进 P D控 制算 法. 真结果 表 明改进 的 P D控 制算法具 有较 强的稳 定性 和 鲁棒 性 , 能有效 I 仿 I 既
LI H u CHANG i i。 N i 。 j— n b
( . 'nRa l y V c to a c n c lI si t Xi n7 0 1 , ia; 1 Xi a iwa o ain lTeh ia ntt e, ' 1 0 4 Chn u a
滞后系统的控制方法

3科技资讯科技资讯S I N &T NOLOGY I NFORM TI ON 2008NO .27SC I ENCE &TECH NO LOG Y I NFOR M A TI O N 学术论坛在工业生产过程中,被控对象往往不同程度的存在着纯滞后。
由于纯滞后的存在,使得被控量不能及时反映系统所承受的扰动,即使测量信号达到调节器,调节机构接受调节信号立即动作,也需要经过纯滞后时间t 以后,才波及被控量,使之受到控制。
因此这样的过程必然会产生较明显的超调量和较长的调节时间。
所以,具有纯滞后的过程被公认为是较难控制的过程,其难控制程度将随着纯滞后t 占整个过程动态的份额的增加而增加。
一般认为纯滞后时间t 与过程的时间常数T 之比大于0.3则说明该过程是具有大迟延的工艺过程。
当t /T 增加,过程的相位滞后增加,使上述现象突出,可能引起系统的不稳定,被调量超过安全线,从而严重影响生产过程的控制品质及危及人身安全。
因此滞后系统的控制一直受到人们的关注,成为重要的研究课题之一。
1常规控制方法目前,对于大滞后的过程有很多解决的方法。
最简单的是利用常规调节器适应性强、调节方便的特点,经过仔细地调整,在控制要求不太苛刻的条件下,满足生产过程的要求。
1.1PI D 控制方案图1所示的是PI D 控制方案,微分环节的输入是对偏差做了比例积分运算后的值。
因此,实际上微分环节不能真正起到对被控参数变化速度进行校正的目的,克服动态超调的作用是有限的,该方案给定和扰动的闭环传递函数分别为:(1)滞后系统的控制方法蔡文镇(福建理工学校福州350002)摘要:本文对滞后系统的控制方法进行了研究。
首先介绍了几种常规控制方法的优越性及局限性,进而提出了为了满足高控制精度的采样控制和预测控制两种方法。
关键词:滞后控制PI D 中图分类号:TB 4文献标识码:A 文章编号:1672-3791(2008)09(c )-0223-02(2)1.2微分先行控制方案微分作用的特点是能够按被控参数变化速度的大小来校正被控参数的偏差,它对克服超调现象能起很大作用。
大滞后系统的温度控制方案

大滞后系统的温度控制方案作者:黄晨欧小雨纪倩文陈君宽郁剑来源:《科学大众》2019年第04期摘 ; 要:温度控制在冶金、电子、机械等工业领域的应用相当广泛,其对生产过程和产品质量有重大影响。
但由于温度控制系统通常具有非线性、时变、大滞后等特性,而传统的PID (比例、积分、微分)控制参数在整个控制过程中是固定的,这就使得其在较复杂的温度控制系统中作用效果较差。
文章提出一种基于BP神经网络的PID控制方法,该方法先通过BP神经网络得到一组基于ITAE指标下最优化的PID控制参数作为初始值,然后对该组PID参数进行在线调整,以达到在不同的情况下都能起到较好的温度控制效果的目的。
通过比较采用不同控制器下的仿真实验,结果表明基于BP神经网络的PID控制方法更具有效性和优势。
关键词:温度控制;BP神经网络;PID控制;大滞后随着我国科技的飞速发展,工业生产对温度控制的要求也不断提高。
在工业控制过程中,由于纯滞后的存在,使得被控对象不能及时响应系统的输入或者扰动。
为了克服大滞后的影响,现已有不少温度控制方案,如Simth预估控制,比例、积分、微分(Proportion-Integral-Differential,PID)控制、模糊控制、神经网络等,但现有的温度控制方法取得的效果并不是很理想:Simth预估控制虽能减弱纯滞后因素的影响,但其对扰动的抑制能力较差;传统PID控制对拥有大滞后、时变等特性的复杂温度控制系统的作用效果较差;模糊控制适应学习能力较弱,比较依赖人的经验。
本文以电阻炉为温控对象,结合PID控制与神经网络,通过Matlab 仿真研究,提出了一种基于误差反向传播算法(Back Propagation Neural Network,BP)神经网络的PID控制方法,该法对模型参数变化有较好的适应性,且能达到较优的控制效果,能满足工业温度控制的要求。
1 ; ;温控对象数学模型4 ; ;结语温度控制是一种具有非线性、时变、大滞后特性的系统,传统的PID控制方法不能使系统达到很好的动态性能。
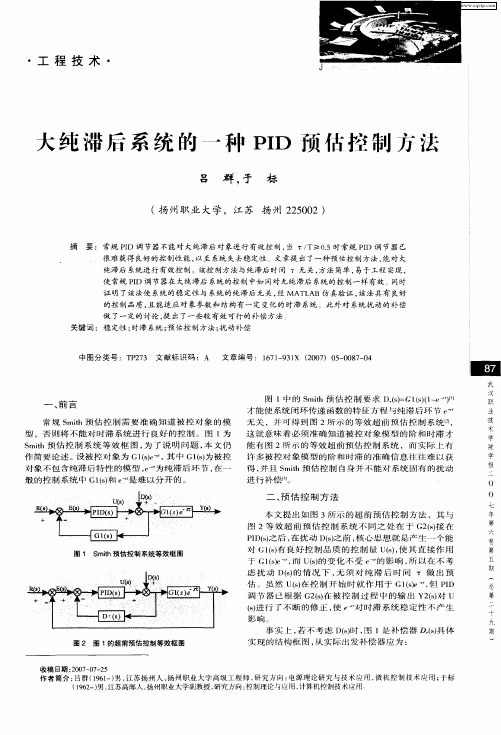
大纯滞后系统的一种PID预估控制方法
二 、 估 控 制 方 法 预
鋈
萋
曩
圣
本 文 提 出 如 图 3所 示 的 超 前 预估 控 制 方 法 ,其 与
图 2等 效 超 前 预 估 控 制 系 统 不 同 之 处 在 于 G ( 接 在 2s )
PDs 后 , 扰 动 Ds 前 , 心 思 想 就 是 产 生一 个 能 I () 之 在 () 之 核
常 规 S t 估 控 制 需 要 准 确 知 道 被 控 对 象 的 模 mi h预 型 ,否 则 将 不 能 对 时 滞 系 统 进 行 良好 的控 制 。 图 1为 S t 估控 制 系统等效 框 图 , 了说 明问题 , 文仍 mi h预 为 本 作 简 要 论 述 。设 被 控 对 象 为 GI )一, 中 G1s为被 控 (e 其 s ( ) 对 象 不 包 含 纯 滞 后 特 性 的模 型 ,一为 纯 滞 后 环 节 , 一 e 在 般 的控 制 系统 中 G1 ) e ( 和 是 难 以分 开 的 。 s
T=10 2 0秒 。仿 真 结 果 如 图 6所 示 。
G1s 预 估 , 1的 闭环 传 函 G ( ) 下 : (的 ) 图 s 如
G()1 五 B = 丽 PDs se s I1 l ) (G )) ( ( )
一
 ̄ "
+
P, 云
_ i
:
) 二 : (1 1 1 P D( G ( + I s[ ) G () 】… + I s 2s PD( G1 e ) ) ) - 2se
维普资讯
・
工 程 技 术 ・
大 纯 滞 后 系 统 的 一 种 P D 预 估 控 制 方 法 I
吕 群, 于 标
( 州职 业大学 ,江苏 扬 州 2 5 0 扬 2 0 2)
自动控制原理滞后系统知识点总结

自动控制原理滞后系统知识点总结自动控制原理中,滞后系统是一种常见的控制系统,也是控制理论中的重要知识点之一。
本文将对滞后系统进行全面的知识点总结,包括定义、传递函数、特性、应用等方面,帮助读者更好地理解和应用滞后系统。
1. 滞后系统的定义滞后系统是一种控制系统,其输出信号滞后于输入信号。
它通过延迟输出信号,平衡输入和输出之间的关系。
滞后系统的主要作用是改变输入信号的相位,使得输出信号能够更好地适应被控对象的特性。
2. 滞后系统的传递函数滞后系统的传递函数可以通过数学模型来表示。
一般而言,滞后系统的传递函数可以用一阶滞后环节来描述,其传递函数表达式为:G(s) = K/(Ts+1),其中K表示增益,T表示时间常数。
3. 滞后系统的特性滞后系统具有以下几个主要特性:3.1 相位滞后:滞后系统通过改变输入信号的相位来实现控制效果,使得输出信号能够滞后于输入信号。
3.2 幅频特性:滞后系统对于不同频率的输入信号具有不同的幅度衰减特性,可以通过调整滞后系统的参数来改变幅频特性。
3.3 稳定性:滞后系统对于特定的增益和时间常数可以实现系统的稳定性,保证系统的输出信号不会出现不稳定现象。
4. 滞后系统的应用滞后系统在自动控制中有着广泛的应用,主要体现在以下几个方面:4.1 相位校正:滞后系统通过改变输入信号的相位,可以实现对系统输出信号的相位校正,提高系统的稳定性和响应速度。
4.2 频率补偿:滞后系统可以通过调整时间常数来实现对输入信号的幅度衰减特性,提高系统对不同频率信号的补偿能力。
4.3 参数调节:滞后系统的参数可以根据被控对象的特性进行调节,达到最佳的控制效果,提高系统的性能。
综上所述,滞后系统是自动控制原理中的重要知识点,它通过改变输入信号的相位来实现对系统的控制。
滞后系统具有相位滞后、幅频特性和稳定性等特点,并广泛应用于相位校正、频率补偿和参数调节等方面。
深入理解和掌握滞后系统的知识,对于掌握自动控制原理和应用具有重要意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大滞后带来的影响 大滞后过程的预估补偿控制 增益自适应的预估补偿控制
大滞后带来的影响
由于过程控制通道中纯滞后的存在,被控 量不能及时反映系统承受的扰动。扰动量 影响的反映要依靠被控参数的检测,由于 滞后的存在,反映时间滞后,因而开始调 节的时间也滞后——调节不及时。 过程会产生明显的超调量和较长的调节时 间。(原因是调节不及时)
基本思想:将 GP (s)es分开,并以 GP (s)为过程控制通道的传递 函数, 以GP (s)的输出信号为反馈信号 。
F(s)
X (s)
GC (s)
GPD (s) GP (s)es
Y (s)
注意:GP (s)es代表实际的被控过 程,GP (s)与es是不可分割的,因 此,Smith提出等效补偿的方法。
GP (s)es
Y (s)
[ X (s) Y1(s)]GC (s)GP (s)es Y (s)
Y1(s) Y2 (s) Y (s)
Y (s) GP (s)es
GP (s)(1 es )
Y (s)
Y (s)
1 e s
Y (s) GC (s)GP (s) es X (s) 1 GC (s)GP (s)
其中:a
T
e TP
,b
KP
TP
Smith预估补偿控制存在的问题
(1)只有t 时产生控制作用,当t
时无控制作用,所以Smith预估补偿 控制对给定值的跟随效果比对干扰 量扰动的抑制效果要好。 (2)由于Smith补偿器要知道被控对 象精确的数学模型,而且对模型十 分敏感,因此难于在生产中应用。
大滞后的界定与控制方案
(1)大滞后过程:纯滞后时间与过程
控制通道时间常数T之比大于0.3。 (2)实践证明,采用串级控制和前馈
控制效果不好,采用必须采用特殊的 控制方案。
大滞后过程的预估补偿控制
基本思想:按照过程特性,预估 出一种模型加入到反馈控制系统 中,以补偿过程的动态特性。
Smith预估补偿控制
GP (s)
2
Y (s)
用计算机实现纯滞后补偿
设被控对象的传递函数为:
G(s)
GP (s)es
KP 1 TPs
es
设采样周期为T,信号延迟N 个周期
T
反馈回路的偏差: e(k) r(k) y2 (k) r(k) y(k) y (k)
控制器输出:u(k) u(k 1) u(k) Smith补偿器输出为:y (k) m(k) m(k N )
很容易且得到较高的控 制品质。
(2)Smith预估补偿控制要求广义 对 象的模型有较高的精度 和相对稳定 性,而加热炉在工作中 由于使用时 间长短、每次处理工件 数量不同而 特性参数会发生变化 .
增益自适应补偿控制方案
TT1 TT2 TT1 TT2 TT1 TT2
H•S H•S H•S I /P
Smith预估补偿控制系统
X (s)
F(s)
G f (s)
U (s)
GC (s)
GP (s)es
GP (s)
Y (s)
es
GP (s)(1 es )
Smith预估补偿控制等效框图
X (s)
U (s)
Y1(s) Y (s)
GC (s)
GP (s)(1 es )
Y2 (s)
1.80 120s 1
调节器比例增益的自动修改
自适应PID调节器的运算关系为:
Im (s)
KC [1
1 TI s
TD
s](
I
* T
I
I
)
当广义对象的静态增益 从1.06变到1.80
除法器的输出信号 I 1.80 /1.06,故自 适应PID调节器的比例增益比原 来的整
定参数KC减小1.80 /1.06倍。
加热炉温度反馈控制系统流程图
I1
H •S
TT1 TT2
I2 H •S
I3 H •S
TT3 TT4 TT5 TT6
I
T
I
定值器 PID
Im
I/P
燃料 空气
系统简介
采用高值选择器 H • S:当每对热电偶 中有一个断偶时,系统 仍能正常工作; 加法器:实现三个信号 平均 加热炉燃料:通过具有 引风特性的喷嘴 进入加热炉,风量能自 动跟随燃料量的 变化按比例地增加或减 少(比值控制系 统),可经济燃烧。
增益自适应预估补偿控制
X (s)
U (s)
GC (s)
F(s)
GP (s)es
Y (s) A
GP (s)
d1(s)
es A/B
B
d2 (s)
1s
加热炉温度预估补偿控制
轧钢车间加热炉多点平均温度反馈 控制系统 系统主要配置:六台设有断偶报警 装置的温度变送器、三台高值选择 器、一台加法器、一台PID调节器 和一台电/气转换器
X (s)
U (s) Y1(s)
GC (s)
GP (s)
es
Y (s)
经过预估补偿,闭环传 递函数特征方 程消去了es,消去了纯滞后对系统 控 制品质的影响,系统品 质与无纯滞后 完全相同。至于分子中 的es仅仅将控
制过程曲线在时间轴上 推迟一个。
Smith补偿的实现
用近似数学模型模拟纯滞后环节—帕德 一阶和二阶近似式
帕德一阶近似式
帕德一阶近似式:
e s
1- s 2
1 s
2
1
s
-1
2
2
1- es
( 2 1
-
1
1
) s
2
帕德二阶近似式
帕德二阶近似式:
1- s 2
es 2 12 1
s
1 s 2
1 s 2
2 12
2 12
1- es
Smith预估补偿器
Smith预估补偿控制分析
加入Smith预估补偿环节后, PID控制的 对象包括原来的广义对 象和补偿环节,
等效传递函数为:
GPC (s)
1.06e90s 120s 1
1.06e90s 120s 1
(1 e90s )
1.06 120s 1
(1)等效被空对象 GPC (s)中,不再包 含纯滞后环节,调节器 的整定变得
由于10s 1 e10s,
所以GPC
(s)
1.06 e 90 s 120 s 1
由于 / T 0.75,若采用普通的 PID调节
器,过渡过程的调节时 间和超调量都很大。
Smith预估补偿控制方案
I
T
GC (s)
Im
1.06 e-s
120s 1
I
e90s
1.06 120s 1
s 2
1 s
2 12
帕德近似式的实现
X (s)
1
1 1 s
2
Y (s)
2
X (s)
1
1 1 s
6
1
1 s
2
Y (s)
2
Smith补偿控制系统框图
Gf (s)
X (s)
GC (s)
U (s)
GP (s)es
Y1(s)
Y2 (s)
1
1 s
2
1
1 1 s
6
I
I IA
Im
1.80e 9 0s 120s 1
Im
1.06e 9 0s 120s 1
1.80 1.06
1.80 1.06 1.80 I I I B 1.06 Im 120s 1 120s 1 Im PID调节器控制的等效对象 模型为:
Go (s)
I (s) Im (s)
加热炉数学模型:
G1
(s)
9.9e 80 s 120 s 1
检测与变送器模型:
Gm
(s)
0.107 10s 1
广义被控对象数学模型 :
1.06 e 80 s GPC (s) G1(s)Gm (s) (120 s 1)(10s 1)
1.06 e 80 s GPC (s) G1(s)Gm (s) (120 s 1)(10s 1)
u(k)
R(s)
Y (s)
GC (s)
GP (s)es
m(k N) y (k) y(k)
m(k)
GP (s)
es
补偿器传递函数:
G( s)
GP
(s)(1
e
s
)
1
KP TP (
s)
es
Smith预估控制算式: y (k) ay (k 1) b[u(k) u(k N )]
Im
I
I
IA
e90s
IB
I
燃料
定值器
I T
自适应
PID
1.06 120s 1
等效框图
I T*
GC (s)
Im
1.06 e90s
120s 1
I
自适应PID
e 1.06 I B
102s 1
IA
90s
I
I
增益自适应PID控制的实现
假设广义对象的静态增 益从1.06变化到1.08, 在相同的操作变量 I m下,因广义对象的输出 I 增大,故除法器1的输出信号 I I / I A 也随之增大,即: