基于GPS车辆数据和图像配准的道路中心线提取
基于GPS车辆轨迹数据的地图匹配算法及应用研究

基于GPS车辆轨迹数据的地图匹配算法及应用研究基于GPS车辆轨迹数据的地图匹配算法及应用研究摘要:随着GPS技术的发展,车辆轨迹数据的获取变得越来越容易。
而地图匹配算法则是通过将车辆轨迹数据与地图进行匹配,得到更准确的车辆位置信息。
本文对目前常用的地图匹配算法进行了系统的总结和比较,并提出了一种基于粗分类和细分类的混合匹配算法。
同时,针对城市道路中的复杂情况,提出了一种考虑车道划分的匹配算法。
最后,在实验中,将所提出的算法和其他算法进行对比,结果表明,所提出的算法能够在不同的道路环境下得到更高的匹配精度,并且在实际应用中具有较大的实用价值。
关键词:GPS车辆轨迹数据;地图匹配算法;粗分类;细分类;车道划分1.介绍GPS技术的普及和智能化交通系统的发展,为车辆轨迹数据的获取提供了越来越多的机会。
地图匹配算法,能够以GPS数据为基础,将车辆在道路上的位置精确地投影到地图上,并进一步提供交通运输领域的应用。
通过地图匹配,提高了GPS定位数据在车辆行驶分析中的可靠性和精确度。
2.研究现状目前,国内外学者在地图匹配算法上进行了广泛的研究和探索。
根据匹配所采用的算法和方法,可以将地图匹配算法分为4类:特征匹配方法、卡尔曼滤波方法、统计学方法和神经网络方法。
各类方法各有优缺点,研究者们在算法设计时需要进行合理的选择。
3.算法设计在目前地图匹配算法中,我们提出了一种基于粗分类和细分类的混合匹配算法。
该算法首先进行道路分类,然后根据具体道路环境进行匹配,从而得到更准确的车辆位置信息。
同时,为了解决城市道路中的复杂情况,我们还提出了一种考虑车道划分的匹配算法。
该算法能够通过GPS数据得到车辆的具体位置和所在车道的信息,解决了普通算法在城市道路中无法有效处理的问题。
4.实验本文所提出的地图匹配算法,在实验中得到了广泛的应用。
我们将所提出的算法和其他算法进行对比,并进行了实际道路测试。
结果表明,基于粗分类和细分类的混合匹配算法和考虑车道划分的匹配算法,能够在不同的道路环境下得到更高的匹配精度,并且在实际应用中具有较大的实用价值。
结合Steger方法和影像分类的道路中心线提取
收稿日期:2017-06-27。
项目来源:国家自然科学基金资助项目(41271420/D010702)。
结合Steger 方法和影像分类的道路中心线提取邓 巧1,周绍光1,胡屹群1,王馨苑1(1.河海大学地球科学与工程学院,江苏 南京 210098)摘 要:针对直接利用监督分类结果提取道路中心线过程过于复杂的问题,研究一种综合利用Steger 方法和影像分类结果的道路中心线提取新策略。
以影像分类结果从Steger 方法获取的条带中心线中初步筛选出候选道路中心线段,根据道路的连续性和方向的一致性进行合理延伸、连接,即可实现道路中心线提取。
实验证明,提取的道路中心线在完整率、准确率和提取质量方面精度较高,并在一定程度上解决了道路断裂问题。
关键词:Steger 方法;影像分类;道路中心线提取中图分类号:P237 文献标志码:B文章编号:1672-4623(2018)02-0064-04道路网是地理信息系统中的重要组成部分,广泛应用于城市规划[1]、变化检测、交通运输[2,3]、个人导航系统和车辆线路规划[4]等方面,利用遥感影像进行道路的自动/半自动提取是道路获取的主要手段之一 [5- 8]。
Steger [9,10]于1998年提出一种非偏的曲线结构探测方法,通过分析线模型的尺度空间行为,阐述非对称道路背景区域的影响能够被移除的理论,可以得到亚像素级定宽、亮/暗条带模型的中心线,并通过合理延伸解决部分道路断裂问题。
Steger 方法具有精度高、鲁棒性好的优点,而运算量大的缺点在众多研究者[11,12]努力下有了很大改善,但提取的条带中存在大量非道路中心线,并未进行专门的道路条带验证,所以提取的虚警较多。
本文综合利用Steger 方法得到的中心线比较准确、方便以及监督分类方法可以明确知道道路类的优势,通过简洁手段达到道路中心线提取的目的。
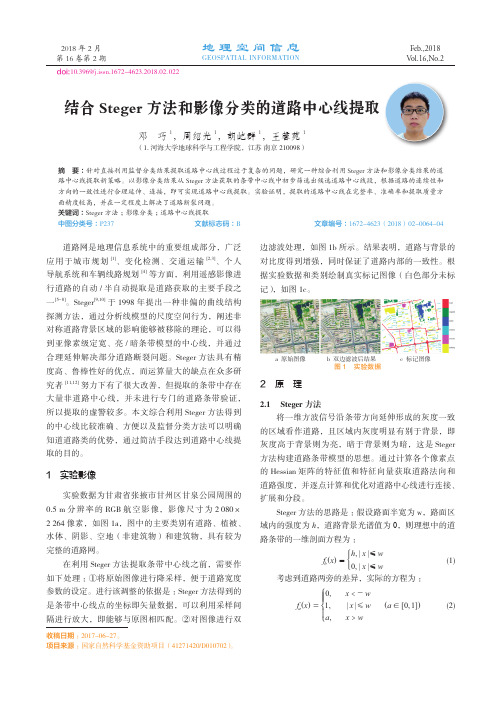
1 实验影像实验数据为甘肃省张掖市甘州区甘泉公园周围的0.5 m 分辨率的RGB 航空影像,影像尺寸为2 080× 2 264像素,如图1a,图中的主要类别有道路、植被、水体、阴影、空地(非建筑物)和建筑物,具有较为完整的道路网。
基于矢量路面提取道路中心线智能提取方法的实现

Science &Technology Vision 0引言在地理信息数据中,道路网络是构成几何数据和应用分析的重要组成部分,道路网的描述,是用GIS 方法对自然界中人文影响和经济状况的表现形式。
对于道路网数据采集,往往是采用人工采集和计算机辅助自动化采集两种方法。
在许多GIS 平台,道路面提取中心线的原理有下面两类方法:(1)道路面按Delaunay 方法构造三角网,此方法在对路端喇叭形处生成的中心线表现为波浪折线和不正确的分叉,点数也较多,与理想形状的边线点几何形似差异较大。
(2)提取道路的面填充,生成栅格位图。
这种方法除了数据格式转换烦琐,还有矢量数据属性的丢失。
本文将针对以上情况,对路面形状进行边基于矢量路面提取道路中心线智能提取方法的实现刘学民摘要道路中心线是网络构建和分析的基础内容,为了从已有的大量道路面中快速高效的提取道路中心线,人们进行了研究并得到了一些相应的自动提取方法。
结合实际,本文介绍一种基于距离和内角相关智能化的提取方法。
关键词提取;道路中心线;相关中图分类号:G06T7/66文献标识码:ADOI :10.19694/ki.issn2095-2457.2020.22.25刘学民本科,高级工程师,主要从事航空摄影测量技术研究及地理信息数据处理等工作,河北省地质测绘院。
AbstractRoad centerline is the basic content of network construction and analysis.In order to quickly and efficiently extract road centerline from a largenumber of existing road surfaces ,some corresponding automatic extraction methods have been studied and obtained.This paper introduces an intelligent extraction method based on distanceand Angle correlation.Key wordsExtraction;Center line of the road;Related77. All Rights Reserved.202022/316线调整、路端处理后,依据科学的计算判别,在已有软件中二次开发自己的工具实现道路中心线自动提取的功能。
《基于GF-2遥感影像的城市道路提取研究》范文

《基于GF-2遥感影像的城市道路提取研究》篇一一、引言随着遥感技术的不断发展和普及,遥感影像在城市规划、交通管理、环境保护等领域的应用越来越广泛。
其中,城市道路作为城市交通的重要组成部分,其提取和分析对于城市规划和交通管理具有重要意义。
GF-2(高分辨率对地观测系统)遥感影像具有高分辨率、多光谱等特点,为城市道路提取提供了重要的数据支持。
本文旨在基于GF-2遥感影像,研究城市道路的提取方法,为城市规划和交通管理提供参考。
二、研究区域与方法1. 研究区域本研究选取了某大城市作为研究区域,该城市具有较为完善的道路网络和丰富的地物类型,适合进行城市道路提取研究。
2. 研究方法本研究采用基于GF-2遥感影像的城市道路提取方法,主要包括以下步骤:(1)遥感影像预处理:对GF-2遥感影像进行辐射定标、大气校正等预处理,以提高影像的质量。
(2)道路特征提取:利用遥感影像的多光谱信息和空间信息,采用面向对象的方法进行道路特征提取。
(3)道路提取:根据提取的道路特征,采用阈值分割、形态学运算等方法进行道路提取。
(4)结果验证:通过实地调查和GIS软件对提取结果进行验证和分析。
三、实验结果与分析1. 实验结果通过上述方法,我们成功地从GF-2遥感影像中提取出了城市道路网络。
以下是部分实验结果:(请在此处插入城市道路提取结果图)图中红色线条即为提取出的城市道路网络。
可以看出,该方法能够有效地从遥感影像中提取出城市道路网络。
2. 结果分析(1)精度评价:我们对提取结果进行了精度评价,通过与实地调查结果进行对比,发现该方法提取的城市道路网络精度较高,能够满足城市规划和交通管理的需求。
(2)优势与局限性:该方法具有以下优势:一是利用高分辨率的GF-2遥感影像,能够更准确地提取城市道路网络;二是采用面向对象的方法进行道路特征提取,能够更好地利用遥感影像的空间信息;三是通过阈值分割和形态学运算等方法进行道路提取,操作简便、快速。
arcscan提取道路中心线原理

arcscan提取道路中心线原理
ArcScan是ArcGIS桌面软件中的一个工具,用于从栅格图像中提取
矢量特征。
它主要用于提取道路、河流等线性特征的中心线。
下面将详细
介绍ArcScan提取道路中心线的原理。
首先,ArcScan利用栅格图像识别道路特征。
它会对图像进行预处理,包括去噪、图像增强等步骤,以提高道路特征的识别效果。
然后,ArcScan通过一系列图像分析算法,如边缘检测、线段追踪等,从图像中
提取出潜在的道路特征。
这些特征将以像素形式表示,构成一个二进制图像。
接下来,ArcScan将二进制图像转换为矢量线要素。
它通过应用一种
名为“跟踪算法”的方法,沿着道路特征的像素路径进行跟踪,将其转换
为线要素。
跟踪算法根据像素颜色、颜色变化、连续像素等特征,将相邻
的像素归类为道路或非道路。
这样,一条矢量线要素就代表了道路的中心线。
在跟踪过程中,ArcScan采用一些策略来处理细节,例如去除小封闭环、合并断开线段等。
这样可以提高中心线的准确性,并减少干扰因素的
影响。
最后,ArcScan将提取的中心线输出为矢量线要素类或特征类,可以
与其他GIS数据进行叠加分析和空间查询。
这样,用户可以利用提取的道
路中心线进行交通分析、路径规划等任务。
基于深度学习的遥感影像道路提取

现代电子技术Modern Electronics Technique2023年12月1日第46卷第23期Dec. 2023Vol. 46 No. 230 引 言近年来,我国道路里程增长迅速,道路路网体系愈加复杂[1⁃2],截至2021年末,全国公路里程为528.07万千米,较2020年增加了8.26万千米。
道路信息在城市规划、交通管理、环境监测等领域具有巨大的价值。
随着遥感卫星技术的发展,遥感影像已经实现了从低分遥感影像到高分遥感影像转变,最高空间分辨率已高达亚米级[3],遥感影像数据的采集周期逐渐缩短,高频次的遥感卫星已经能够实现分钟级别的更新,为遥感影像运用于道路信息提取与分析提供了可能。
近年来深度学习在图像处理方面的技术得到快速发展,利用深度学习进行高分遥感影像道路信息提取成为近年来的热门研究之一[4⁃8]。
文献[9]基于全卷积神经网络对道路进行提取,再依照形态学计算以及格拉斯⁃普克算法对道路中的误检图斑进行剔除,并连接提取中断的道路。
文献[10]利用PCNN基于深度学习的遥感影像道路提取赵 亮, 郭杜杜, 王庆庆, 徐勤功(新疆大学 交通运输工程学院, 新疆 乌鲁木齐 830046)摘 要: 针对遥感影像道路提取任务中因地物环境复杂而导致道路掩码提取精度差、道路中心线断裂和不连续的现象,提出一种深度学习语义分割模型CP⁃Unet 进行道路掩膜提取,将提取的道路掩膜进行形态学处理,采用ZS 细化算法进行道路中心线提取,并提出一种优化连接模型进行中心线处理。
CP⁃Unet 扩大了模型感受野,增强了对道路信息的捕捉能力和融合能力,提高了道路掩码的提取精度,优化连接模型通过设定几何约束条件进行中心线断点连接,提高道路中心线的连续性。
以新疆某团场分辨率为0.5 m 的wordview3卫星影像为实验数据,实验结果表明:CP⁃Unet 的精确率、召回率、平均交并比分别提高到91.92%、88.27%和81.43%,能够较好地克服复杂环境干扰,提取精度较高,中心线提取方法在两种不同的复杂环境下提取准确率和完整率分别为94.82%、92.79%和96.77%、94.17%,提取结果更加连续且完整。
一种车辆运行轨迹提取方法
一种车辆运行轨迹提取方法
1. 摄像头安装:在车辆上安装一台或多台摄像头。
摄像头可以是单个或多个,视情况而定。
2. 图像采集:通过摄像头获取车辆的图像数据。
3. 图像处理:对获取的图像数据进行处理,提取车辆的关键点或特征点。
4. 特征匹配:对不同图像之间的特征点进行匹配,以跟踪车辆的运动轨迹。
5. 位置估计:根据车辆运动的速度和方向,以及前一帧的位置估计当前帧的位置。
6. 轨迹更新:将每一帧的车辆位置信息记录下来,以生成车辆的运行轨迹。
7. 数据分析:对轨迹数据进行分析,以获得关于车辆行驶路线、速度和时间等信息。
总之,车辆运行轨迹提取方法基本思路是通过摄像头获取车辆的图像信息,再对图像数据进行处理和分析,从而提取出车辆的运行轨迹信息。
这种方法可以用于交通监控、车辆导航和行驶轨迹分析等领域。
快速提取城市道路中心线
2 0 1 5 年 1月
测绘 与 空 间地 理 信 息
GEOM AT I CS & S PATI AL l NFoRMATl oN T ECHNOL OGY
Vo 1 . 3 8, No . 1
J a n ., 2 0 1 5
快 速 提 取 城 市 道 路 中心 线
Th e Ce nt e r l i n e Ra p i d Ex t r a c t i o n o f Ur b a n Ro a d
J I ANG Z h o n g—l i a n g,YANG Mi n—h u a ,YANG De—d i
( S c h o o l o f Ge o s c i e n c e s a n d l n f o—P h y s i c s ,C e r s i t y , C h a n g s h a 4 1 0 0 8 3 , C h i n a )
块, 根据 道路 条 块 间 的上 下 左 右 关 系 判 断条 块 间是 否 连 通; 根据 道路 条块 间 长度 比值 以及 与 左右 两 边 起 始 点 连 线 组成 的两段 有 向线段 对应 的夹 角∽ 与 阈值 n , 的大
小 关系 判断是 否处 于 路 口。如若 连通 并 且 不处 于路 口则 合 并这 两个 道 路条 块 , 扫描 完整 幅 图像 后 , 所有 的道路 条
,
h a s p r a c t i c l a v a l ue .
Ke y wo r d s: oa r d c e n t e r l i n e ;r e mo t e s e n s i n g i ma g e s ;s c a n l i n e
从高分辨率遥感影像中提取城市道路的新方法
从高分辨率遥感影像中提取城市道路的新方
法
高分辨率遥感影像在城市规划和交通管理中发挥了至关重要的作用。
然而,在这些影像中提取城市道路依然是一项具有挑战性的任务。
本
文将介绍一种新方法,该方法可以在高分辨率遥感影像中准确地提取
城市道路。
第一步:影像预处理
首先,需要对影像进行预处理,以减少噪音和消除不必要的信息。
这
涉及到影像增强和过滤。
影像增强可以提高影像中的对比度和清晰度,使道路更加明显。
过滤可以去除不相关的信息,如树木和建筑。
第二步:图像分割
图像分割是将图像划分为多个区域的过程。
通过对影像进行图像分割,可以更好地识别道路区域。
目前,常用的图像分割算法包括基于边缘
检测的方法、阈值化方法和区域生长方法等。
第三步:提取道路特征
提取道路特征是指在分割后的图像中标记和提取道路的像素,以求得
道路的几何和拓扑特征。
这可以通过多种方法实现,如基于形态学操
作的方法、基于纹理的方法等。
第四步:道路拟合和重建
最后,需要对提取的道路特征进行拟合和重建。
道路拟合是基于检测
到的道路特征生成道路中心线的过程。
道路重建是基于检测到的道路
特征重建整条道路的过程。
这可以通过多种数学模型来实现,如三次
B样条曲线等。
总结:
该新方法以高分辨率遥感影像为主要数据来源,采用图像处理、图像
分割、道路特征提取、道路拟合和重建等技术手段,实现了准确地提
取城市道路。
该方法在城市规划和交通管理等领域具有重要应用价值。
基于格网相交的遥感影像道路中心线提取方法
基于格网相交的遥感影像道路中心线提取方法
唐智慧;吴虹坪;周星宇;李正伟
【期刊名称】《计算机仿真》
【年(卷),期】2022(39)1
【摘要】为从遥感影像中获得可用于建模的道路中心线矢量数据,首先利用成熟光谱反射(面向对象图像分类)方法,自动判读出道路范围,继而使用转化工具得出道路范围的矢量轮廓;通过添加辅助线与轮廓相交、提取线段中心点的方式得出道路中心线上的点集;最后设计工作流对点集进行排序处理,最终转化成可以用于规则建模的道路矢量数据。
结果表明上述方法可有效利用遥感数据作为数字孪生几何模型的建模数据来源,同时,方法步骤可利用ModelBuilder(模型构建器)进行代码化整合,形成易于推广的端到端模式。
【总页数】5页(P130-133)
【作者】唐智慧;吴虹坪;周星宇;李正伟
【作者单位】西南交通大学交通运输与物流学院;合肥工业大学材料科学与工程学院;西南交通大学综合交通大数据应用技术国家工程实验室
【正文语种】中文
【中图分类】TB24
【相关文献】
1.像元与对象特征融合的高分辨率遥感影像道路中心线提取
2.高分辨率遥感影像上道路中心线的半自动提取
3.利用动态规划半自动提取高分辨率遥感影像道路中心
线4.基于机载LiDAR和高分辨率遥感影像的道路中心线提取5.基于DeepLabV3+的遥感影像道路中心线提取
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
没 道路 f l', o}B疗 ( 2a),为俅证能得到较准确的道 路线 条 ,需 pf刈离散数据 点进 行栅格化 处弹 ,并进 行 膨fJK、H:运 、细 化等 形态学处 理 .使之 成 为单像 元 宽 瞍的线 条 然 I『1j, 过 彤态学 处舜 的骨架线 存 多 处 余线条 , f{_ 个}jIJ地方存在断裂情 况 (I_筝I 2h)
的 “分级”提取道路 t一心线 的方法 。蒋益 娟 ” 等利用
种细 化的道路 网络 几何特征 提取方法 提取道 路 中心 线 ,fH细化过 程 中可 能会存 在断 裂 、冗 余 等情 况 一根 据 ( s数据 特点 以 及 单独 运用 GPS数 据会 f“现 断 裂 、
C余 等情 况 .本史提 H{了一利 古合 GP法提取 道路 中心线 ,该算 法需 要用户提 供每条 道 路 的起 始种 子点 ,再 利用 Burns线 提取 算 法计算 道 路 种 子点 向 ,)t存 中心点周 同生成 道路模板 ,然后 通 过模板 配获取道路 片段 ..该算法对种子点要求高 , | 1. 能I卜确划断有 阴影遮盖的道路 。
势 YUAN I1lII 等利用綦于分解的分割方法分割道路段 ,
f}3据 1 辆 轨迹跨 越的道路段 数 量和罔像 特 识 别车
辆 GPS数据 甭属 F道路 区域 ,再利用 滤波后 的车辆
数 构建道路 f“J络~ 。 振华 ” 等根据 GPS数据采样问
隔 K、数据 量火 、分 布不均 等特点提 H{了一种栅格 化
中国分 类号 :1'237
文献 标志 码 :【{
文章 编号 :l072— n i t j 、i)I—Ht}4S【)l_
道 路信 息足地 理空 间数据 库 [}1的 重要数据 ,准确
1 道路中心线提取 思想
和及 }fIf更新 的道 路网 为车辆导航 和路线 规划提供 了 重
要条什 I 传统的道路 网提取方法主要包括实地 测绘 和
1.2 火变换提取初始道路段 火 变换 是 像变换 中的经 手段 之一 ,主嘤用
} 从 像 ,I 分离 …具有某种 相同特 的 几何 形状 : 为将特定 彤 的点 变换 列 -fK参数空 间 l ,根
据 参数 点 的 累汁结 果找 到一 个橄 大值 对 啦的解 ,
王 馨 苑 等 .基 于 G PS 车 辆 数 据 弄口图 1雾首己准 的 道 路 中 l芄提 取
随香 裁 ( I s信 号记 录仪 的普 及 ,乍辆 GPS数据 的获取 变得 方便快捷 相 比于传统提 取道路 方法 .利 川 /} 辆 (; 数槲提取 道路 网具 有易获取 、成本低等优
1.1 GPS乍辆数据提取 初始道路骨架线 ( s H 租 数据 束 r1吗鞍 II J市,结 合 屿鞍 山市 的
利用 霍夫 变换获取 图像 配准 的起 始点 ,并 结合 图像 配准得 到平 滑无 冗余的 道路 中心 线 以马鞍 山 车辆数据 为倒 ,实验 结果表 明 ,
与细化 操作 相 比,该 方法在 道路 中心线提 取 质量 上有 了显 著提 高
关 键词 :GPS车辆数 据 ;细 化 ;图像 配 准 ;霍 夫 变鞭 ;道 路 中心线
琏 j 遥感影 像的道路 提取 ..实地测绘 准确率 高 ,但 费 Itj"费力 [2- ̄1 Poz A P Dlu 0等 利川矩形来模拟道路段 ,采 川 主动 试验 策略提取 道路段 ,再从 已提取 的道路段 中
H蒋 H 『.1 H
提取 道路 中心线 ;但 f{1于道 路边缘 不完整或 道路宽 度 变化 等原 ,陔疗法提取的道路 中心线位置不太准确。 I k S l IIII等 使用 白适 应最 小二乘 模 板 配方 法替 代
2【】18年 第 1n卷 第
地 理 空 间 信
f) P r、 rl A I l ()l{M A
1an.,2018 Vb1.16.N O.
__r GPS乍辆数据 和图像配准 的道路II-心线提取
王馨苑 ,周 绍光 ,胡屹群
f海 大学 地球科 学 T程 学院 ,江 苏 l柯 210098
摘 要 :GPS车辆数据 可提 供 详细 的道路 网信 息,而 它可 能存 在数据 误 差和 冗余 问题 ,可 采 用形态 学处理 中的 细化操 作得 到 近
似 道路 中心 线 针 对 细化操 作得 到的 曲线 弯曲度过 3v5_存 在孤 立数据 点 、数据 冗余 等情 况 ,以得到 的近 似道路 中心线 为基 ;住线 ,
准 两边 延伸 就 I r得到整 条道路 的 r}I心线 捉戢 道路 ff1心线 后 ,将 埘幢 的骨 架线抹 除 ,继 续下 7欠峰
·49 ·
这 个 阱 对 应 着 要 寻找 的 几 何 形 状 的 誉数 (如 “线 , 答 数就 会甜应 直线 的斜 率与常 数 ,从 lf得刮 线 参数 卡H 的 点 组 成 的 A 线 段 )。
为了 利用 像 准 实现 道 路 fIl心 线 的 自动 提 取 , 必须 嘤确 定模 板 像 的道路 ·flJfJ、起 始点 ,陔点 『}I诬 夫 变换 得到 .. 霍 犬 变换 的峰 值取 lfH,”J 以 僻刮 ·条 道路 I 的若 1:直 线段 .南于骨 架线 足 辆 道 路 I 轨 迹 的fI{{线 表示 .共线 多数 仡道路 I1iJ 线 L,昕 以锥 火变换得到的 A线段 【!I】勾道路 中心线段 ,如 3昕爪 取 t11I州线段 的 两端 点 巾心 战取 惯板 像 和待眦 准 像 ,摸 板 像 的 巾心点 为道路 r1 心 起 始点 ,利 JIJ 像